
核磁共振陀螺仪泵浦光频率波动抑制
2017-06-05 14:20:15王学锋周维洋邓意成刘院省
中国惯性技术学报 2017年2期
王学锋,周维洋,邓意成,刘院省
(北京航天控制仪器研究所,北京 100039)
核磁共振陀螺仪泵浦光频率波动抑制
王学锋,周维洋,邓意成,刘院省
(北京航天控制仪器研究所,北京 100039)
核磁共振陀螺仪利用原子核自旋磁矩在静磁场中进动频率的不变性敏感载体转动信息。针对泵浦激光频率漂移影响核磁共振陀螺仪性能的问题,研究了泵浦激光频率漂移影响核磁共振陀螺仪性能机理和抑制方法。通过分析核磁共振陀螺仪理论输出的数学模型和自旋光泵极化129Xe核子的过程,阐明了泵浦激光频率波动对陀螺仪性能影响的机理。分析表明,为了获得更高的碱金属极化率和稳定性,从而得到更好的陀螺仪零偏稳定性,需要将泵浦光的频率稳定在87Rb的原子的共振跃迁频率处。采用波长调制法实现了泵浦光频率的稳定控制。通过实验对比发现:稳频使得陀螺仪的零偏稳定性从389.68 (°)/h(1σ)降低至40.74 (°)/h(1σ),降低了89.5%。因而得出结论:抑制泵浦激光频率的漂移可以有效提高核磁共振陀螺仪的性能,主要体现在陀螺仪的零偏稳定性上。
核磁共振陀螺仪;零偏稳定性;波长调制稳频;泵浦光
原子陀螺仪是继传统的转子式陀螺仪、光学陀螺仪和 MEMS陀螺仪之后的一种新型陀螺仪[1-3]。核磁共振陀螺仪是一款成熟度较高的原子陀螺仪,其利用原子自旋进动敏感载体转动信息。核磁共振陀螺仪具有小体积、高精度、抗振动等特点,有望满足微小型武器装备,如微纳卫星、无人机、无人潜航器等对微小型高精度惯性器件的要求,在国防军事和民用领域有着广阔的应用前景[4-5]。
20世纪80年代,美国Litton与Kearfott公司分别研制成功零偏稳定性为0.05 (°)/h和0.1 (°)/h的核磁共振陀螺仪样机[5-7]。2015年美国诺斯若普•格鲁曼公司研制成功表头体积5 cm3、零偏稳定性0.01 (°)/h(1σ)的工程样机[8-10]。国内核磁共振陀螺仪的研究起步较晚,目前仍处于低精度原理样机研制阶段。国内核磁共振陀螺仪的主要研制单位包括航天十三所、航天三十三所和北京航空航天大学等。
在核磁共振陀螺仪中,泵浦光用于制备宏观核自旋磁矩,探测光用于测量宏观核自旋磁矩的进动频率进而获取载体转动信息。在泵浦激光器自由运转模式下,其频率随时间波动,直接导致碱金属极化率发生改变,宏观核自旋磁矩无法保持稳定,进而影响陀螺仪的零偏稳定性。针对上述问题,本文研究了泵浦光频率波动影响核磁共振陀螺仪零偏稳定性的机制,采用波长调制法对泵浦光频率漂移进行抑制。结果表明,泵浦光频率的漂移由901 MHz/h降低至60 MHz/h,核磁共振陀螺仪零偏稳定性从 389.68 (°)/h(1σ)提高至40.74 (°)/h(1σ),有效提高了陀螺仪的性能。
1 泵浦光频率波动对核磁共振陀螺仪的影响
核磁共振陀螺仪采用碱金属原子和惰性气体原子作为工作介质,利用原子核自旋在惯性空间中的定轴性以及原子核自旋磁矩在静磁场中的 Larmor进动感知载体转动信息。泵浦光用于制备宏观核极化磁矩,是核磁共振陀螺仪的关键器件之一。激光器自由运转时,泵浦光频率随时间发生漂移,对碱金属的极化过程有很大的影响,导致宏观核极化磁矩的不稳定,使得陀螺仪的零偏随时间漂移。
1.1 核磁共振陀螺仪工作原理
图1示出了核磁共振陀螺仪工作原理。通过外加泵浦激光和静磁场B0,极化碱金属原子87Rb,在缓冲气体 N2的参与下129Xe原子通过自旋交换间接被极化,产生宏观极化磁矩M,如图1(a)所示。通过外加驱动磁场,使得宏观核极化磁矩M围绕静磁场B0作Lamor进动,如图1(b)所示。当载体以角速度Rω转动时,如图1(c)所示,此时M的进动频率为

式中:γ为129Xe原子的旋磁比。通过探测宏观极化磁矩的进动角频率Lω的变化量可以获得载体的转动信息。
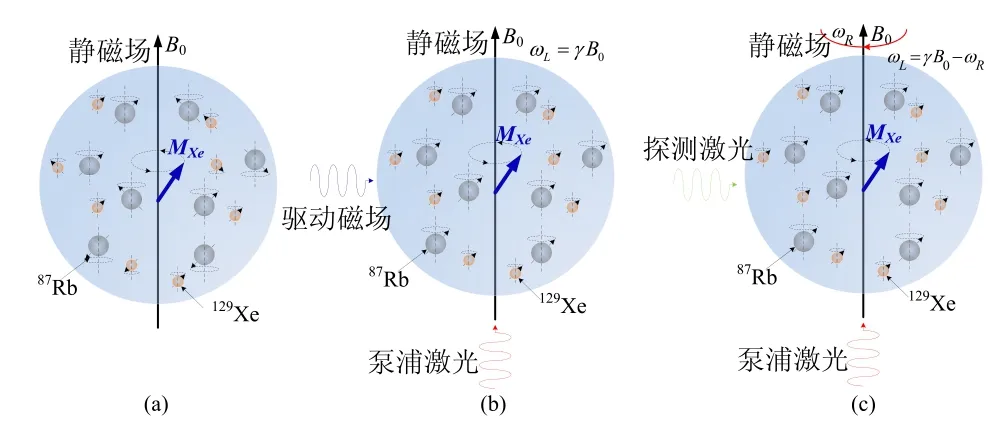
图1 核磁共振陀螺仪工作原理示意图Fig.1 Principle of nuclear magnetic resonance gyro
1.2 泵浦光光路系统
图2为核磁共振陀螺仪泵浦光光路系统。DBR激光二极管输出波长795 nm、功率30 mW的线偏振激光,经过准直透镜准直后由四分之一波片转换为圆偏振光,用于极化原子气室中的碱金属原子87Rb。光电探测器用于检测原子核自旋磁矩的进动信号。

图2 核磁共振陀螺仪泵浦光光路系统Fig.2 Pump optic circuit of nuclear magnetic resonance gyro
1.3 泵浦光频率漂移对陀螺仪零偏稳定性的影响分析
核磁共振陀螺仪理论输出为[11]

式中:B1是驱动磁场强度,系统稳定后保持不变;T1和T2分别为129Xe核极化磁矩的横向和纵向弛豫时间,气室温度稳定和磁场恒定时可以近似为常值。从公式(2)可以看出,影响陀螺仪零偏稳定性的主要因素是宏观核极化磁矩强度。
泵浦激光通过自旋交换光泵浦法制备宏观核极化磁矩。自旋交换光泵浦是指利用激光泵浦的方法使碱金属原子87Rb的核外价电子获得高度极化,在N2分子的参与下87Rb原子与129Xe原子形成范德瓦尔斯分子,该分子解体后87Rb原子的电子自旋与129Xe原子的核自旋进行交换。特定时间(通常为87Rb和129Xe的自旋交换弛豫时间)后,体系达到平衡,129Xe原子获得稳定的宏观核自旋磁矩。图3给出的漏桶(Leaky Bucket)模型可以直观地描述自旋交换光泵浦的过程。

图3 自旋交换光泵“漏桶”模型Fig.3 Leaky Bucket of spin-exchange optical pumping
泵浦光频率漂移直接影响碱金属原子的极化过程。泵浦光为圆偏振光,具有特定的角动量,能够将碱金属原子抽运到特定 Zeeman能级,实现碱金属的极化。泵浦光频率漂移使得抽运到特定Zeeman能级的碱金属原子数发生变化,宏观电子自旋磁矩无法稳定。此外,泵浦光频率漂移也会间接影响惰性气体宏观核自旋磁矩的稳定性。在缓冲气体分子的参与下,碱金属原子与惰性气体原子通过自旋交换实现核自旋磁矩的极化。泵浦光频率的漂移使得极化的碱金属电子自旋磁矩不稳定,间接导致宏观核自旋磁矩的大小和方向也发生变化。泵浦光频率漂移还会影响角速度检测过程。线偏振激光在碱金属原子中的 Faraday偏转效应是检测惰性气体原子核自旋磁矩进动磁场的主要途径。不稳定的宏观核自旋磁矩导致其进动磁场也不稳定,进而影响解调出来的核自旋磁场的进动频率和幅度,使得核磁共振陀螺仪的零偏稳定性变大。
图 4给出了泵浦激光频率与泵浦率关系的仿真曲线。从图中可以看出泵浦率与泵浦光的频率呈钟形曲线关系。当泵浦激光频率处于87Rb原子跃迁频率处,钟形曲线在最高点,泵浦率最大,此时87Rb的极化率也最高,泵浦激光频率波动对泵浦率的变化也较小。因此,需要将泵浦激光的频率稳定在87Rb原子跃迁频率处。

图4 泵浦光频率与泵浦率关系的仿真曲线Fig.4 Simulation wave of relationship between pump rate and pump laser frequency
2 泵浦光稳频系统
在核磁共振陀螺仪中,泵浦光频率工作在原子跃迁线共振或者近共振点处。波长调制稳频和饱和吸收稳频都是以原子跃迁线为参考基准。饱和吸收法稳频精度较高,但是会增加陀螺仪光路结构的复杂度,增大陀螺仪的体积。本研究采用波长调制法抑制泵浦光频率的漂移,具有光路简单、易于实现等特点,能够满足核磁共振陀螺仪小型化的要求。
2.1 波长调制稳频原理
波长调制稳频是以Lambert-Beer定律为基础的,当光束穿过介质时,介质对光产生吸收作用[12]。当一束发光强度为I0()υ的探测光通过原子气室,被气体分子吸收后,透射光强减弱为I()υ:

式中:L为光通过待测气体的吸收光程;C为吸收气体的浓度;σ()υ为气体在频率为υ处的吸收系数。
当气体浓度和光程等因素恒定时,透射光强变化主要由激光频率的波动引起,通过检测吸收光强即可确定激光频率的变化情况。
波长调制光谱法得到的吸收谱线的峰线对应于原子跃迁线的中心位置。因此,需要将泵浦激光频率需要稳定在吸收谱线的中心位置。波长调制吸收谱线是洛伦兹线型,因而可以通过判断其微分信号来确定输出频率的偏移情况。对泵浦激光器输出电流进行高频调制,使其在工作频率附近有微小的变化,光电探测器探测得到的光谱信号也有相应的变化。光谱信号经过I/V放大、滤波后,通过相敏检波器可以得到相应的控制信号即纠偏电流,可以把激光器的工作频率纠回参考频率处。
2.2 泵浦光稳频系统
图 5给出了泵浦光频率稳定控制系统的组成框图。对比图2中核磁共振陀螺仪泵浦光光路系统,稳频系统在保持原有光路基础上加上信号检测和处理系统,该稳频系统没有给核磁共振陀螺仪增加额外体积,能够保证核磁共振陀螺仪正常的工作状态。

图5 泵浦光频率稳定控制系统的组成框图Fig.5 Block chart of frequency control system of pump laser
光电探测器探测得到的泵浦光信息经过 I/V放大之后转变成电压信号,再经过隔直放大滤掉低频噪声。经A/D转换成FPGA数字处理系统需要的数字信号。对激光器恒流源进行高频调制,调制后的吸收光谱信号输入到相敏检波器中与调制信号进行相乘运算得到激光器输出频率与铷原子跃迁频率进行比较的误差信号。此信号经过低通滤波得到吸收光谱的微分信号。根据微分信号判断激光器输出频率的漂移情况:激光频率在铷原子跃迁频率处,微分信号为0,控制信号也为0;激光频率在铷原子跃迁频率左边,微分信号为负,控制信号为正;激光频率在铷原子跃迁频率右边,微分信号为正,控制信号为负。微分信号经过数字 PID处理得到控制信号回馈输出到激光器驱动模块,最终将系统稳定在微分信号为0的位置,实现泵浦光的频率稳定控制。
3 实验结果和分析
图6给出了载体输入角速度为零时,泵浦激光器稳频前核磁共振陀螺仪的输出和泵浦光的频率误差信号。可以看出,泵浦激光器稳频前陀螺仪输出的变化趋势与泵浦光频率漂移趋势一致。
图 7给出了载体输入角速度为零时泵浦激光器稳频后核磁共振陀螺仪的输出和泵浦光的频率误差信号。泵浦光频率稳定后陀螺仪输出和泵浦光频率的漂移均得到了有效抑制。激光频率稳定后,碱金属原子自旋极化过程变得稳定,惰性气体原子核自旋磁矩不再波动,检测到的陀螺仪输出趋于稳定。
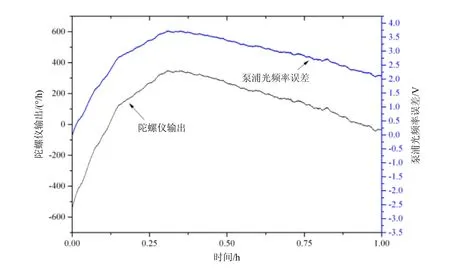
图6 泵浦激光器稳频前陀螺仪输出与泵浦光频率误差输出Fig.6 Gyro output and frequency error with free-running pump laser
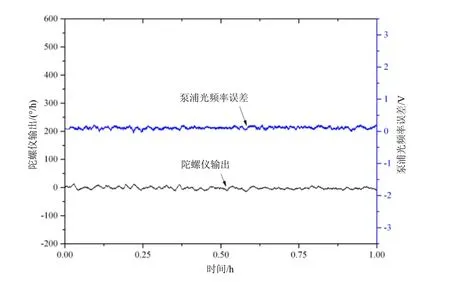
图7 泵浦光频率稳定后陀螺仪输出与泵浦光频率误差输出Fig.7 Gyro output and frequency error with steady frequency pump laser
表1进一步给出了泵浦光频率稳定度与对应的陀螺仪的零偏稳定性:泵浦光频率稳定度由901.27 MHz/h提升至60.23 MHz/h。核磁共振陀螺仪的零偏稳定性也相应的由389.68 (°)/h(1σ)提高至40.74 (°)/h(1σ)。数据表明,泵浦光频率波动是影响核磁共振陀螺仪零偏的重要因素,该激光频率稳定控制系统能够大幅提升核磁共振陀螺仪的零偏稳定性。

表1 泵浦光频率稳定前后实验数据对比Tab.1 Data comparison between before and after pump laser frequency controlled
此外,需要指出,泵浦光的频率稳定度提高了15倍而陀螺仪的零偏稳定性只提高了不到10倍,这是因为陀螺仪零偏信号包含了一定的噪声,而泵浦光频率误差信号噪声较小。
4 结 论
本文研究了泵浦光频率漂移对核磁共振陀螺仪零偏稳定性的影响。采用波长调制法实现了泵浦光频率稳定控制,将陀螺仪的零偏稳定性提高将近1个数量级。需要指出的是,波长调制法稳频的精度有限,能够满足低精度核磁共振陀螺仪的稳频需要。随着核磁共振陀螺仪性能的不断提高,仍需进一步提升激光频率的稳定性。
(References):
[1] 刘院省, 王巍, 王学锋. 微型核磁共振陀螺的关键技术及发展趋势[J]. 导航与控制, 2014, 13(4): 1-6. Liu Yuan-xing, Wang Wei, Wang Xue-feng. Key technology and development tendency of mirco nuclear magnetic resonance gyroscope[J]. Navigation and Control, 2014, 13(4): 1-6.
[2] 王巍. 惯性技术研究现状及发展趋势[J]. 自动化学报, 2013, 39(6): 723-729. Wang Wei. Status and development trend of inertial technology[J]. Acta Automatic Sinica, 2013, 39(6): 723-729.
[3] 严吉中, 李攀, 刘元正. 原子陀螺基本概念及发展趋势分析[J]. 压电与声光, 2015, 37(5): 810-816. Yan Ji-zhong, Li Pan, Liu Yuan-zheng. Analysis on the basic concept and the development tendency of atomic gyroscopes[J]. Piezoelectrics and Acousto-optic, 2015, 37(5): 810-816.
[4] 李攀, 刘元正, 王继良. 核磁共振微陀螺的现状与发展[J]. 微纳电子技术, 2012, 49(12): 769-785. Li Pan, Liu Yuan-zheng, Wang Ji-liang. Current status and development of nuclear magnetic resonance micro gyroscope[J]. Micronanoelectronic Technology, 2012, 49(12): 769-785.
[5] Fang J C, Qin J. Advances in atomic gyroscopes: A view from inertial navigation applications[J]. Sensors, 2012, 12(5): 6331-6346.
[6] Larsen M, Bulatowicz M. Nuclear magnetic resonance gyroscope[C]//IEEE International Frequency Control Symposium. 2012: 1-5.
[7] Greenwood I A. Nuclear gyroscope with unequal fields. US: 4974[P]. 1979-4-3.
[8] Obispo S L. Techniques to characterize vapor cell performance for a nuclear-magnetic-resonance gyroscope[D]. California Polytechnic State University, 2012.
[9] Meyer D, Larsen M. Nuclear magnetic resonance gyro for inertial navigation[J]. Gyroscope and Navigation, 2014, 5(2): 75-82.
[10] 周维洋, 王学锋, 邓意成, 等. 泵浦激光频率波动对核磁共振陀螺仪零偏稳定性的影响研究[J]. 导航与控制, 2017, 16(2): 47-51. Zhou Wei-yang, Wang Xue-feng, Deng Yi-cheng, et al. Nuclear magnetic resonance gyro with frequency fluctuation of pump laser[J]. Navigation and Control, 2017, 16(2): 47-51.
[11] 蔡学森, 戴金波. 波长调制光谱理论研究[J]. 国外电子测量技术, 2009, 28(6): 28-30 Cai Xue-sen, Dai Jin-bo. Theoretical study on wavelength modulating spectrum[J]. Foreign Electronic Measurement Technology, 2009, 28(6): 28-30.
Suppression of pump laser frequency drift of nuclear magnetic resonance gyroscope
WANG Xue-feng, ZHOU Wei-yang, DENG Yi-cheng, LIU Yuan-xing
(Beijing Institute of Aerospace Control Devices, Beijing 100039, China)
The stable precession of the atomic spin along a static magnetic field is used to sense the system angular rate, which is the theoretical basis of Nuclear Magnetic Resonance Gyroscope (NMRG). In order to solve the problem that the performance of NMRG is influenced by the frequency fluctuation of pump laser, the influence mechanism and the way to control the fluctuation are studied. The theoretical model of NMRG is introduced, and the process of129Xe polarization via Spin-Exchange Optical Pumping (SEOP) is analyzed. The analysis shows that the pump laser frequency needs to be stabilized to the resonance transition frequency of alkali atoms to get high and stable alkali atomic spin polarization and low bias-drift of NMRG. The wavelength modulation is adopted to realize the stable control of the frequency fluctuation of pump laser. The contrastive experiments show that the bias drift of NMRG is reduced to 40.74 (°)/h (1σ) from 389.68 (°)/h (1σ) after the pump laser frequency is controlled, which is reduced by 89.55%. It can be concluded that the control of fluctuation of pump laser can effectively improve the performance of NMRG, especially the bias stability.
nuclear magnetic resonance gyro; bias stability; frequency drift control; pump laser
1005-6734(2017)02-0236-04
10.13695/j.cnki.12-1222/o3.2017.02.018
2017-02-07;
2017-03-30
国家自然科学基金(11304007,61501015)
王学锋(1974—),男,研究员,博士生导师,主要从事新型惯性仪表技术研究。E-mail: xuefeng_wang@sina.cn
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01 06:08:32
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
电子制作(2018年9期)2018-08-04 03:30:54
长春理工大学学报(自然科学版)(2018年2期)2018-05-26 01:49:37
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
中国设备工程(2017年24期)2017-12-28 07:40:14
电子测试(2017年15期)2017-12-18 07:18:51
山东工业技术(2016年15期)2016-12-01 05:32:01
中国光学(2016年2期)2016-11-09 12:11:50
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
