
空间三轴机抖激光陀螺交流稳频系统设计
2017-06-05 14:20:15张明辉王继良王京献
中国惯性技术学报 2017年2期
吴 凡,张明辉,傅 鑫,郭 昕,王继良,王京献
(西安飞行自动控制研究所,西安 710065)
空间三轴机抖激光陀螺交流稳频系统设计
吴 凡,张明辉,傅 鑫,郭 昕,王继良,王京献
(西安飞行自动控制研究所,西安 710065)
针对空间三轴机抖激光陀螺设计了交流稳频控制系统,分析了系统原理,进行了Simulink仿真建模和试验研究。在系统原理中分析了控制过程,推导了系统函数,通过Simulink交流稳频系统仿真建模摸索了空间三轴机抖激光陀螺交流稳频系统中 PID参数对系统响应的影响,并得到了优化参数(KP=0.048, KI=0.0021, KD=0.0037),为硬件调试提供了参考。将交流稳频控制系统应用于国产某型空间三轴机抖激光陀螺进行试验,试验结果显示通过PID参数调节后的交流稳频陀螺PZT码值变化平稳,陀螺静态脉冲输出稳定,与原直流稳频控制方法相比将空间三轴机抖激光陀螺的精度提高了20%。
空间三轴;激光陀螺;交流稳频;PID参数
激光陀螺具有启动快、寿命长、数字输出、动态范围宽、可靠性高、技术成熟度高等诸多优点,目前已成为高精度惯性导航系统的首选惯性传感器,广泛应用于机载捷联惯性导航系统中[1-2]。近年来,随着惯性导航需求的提升和光学加工制造技术的成熟[3-4],激光陀螺不断向着高精度、小型化、集成化的方向发展[5],其中,空间三轴机抖激光陀螺具有体积小、重量轻、集成度高等优势,成为机抖激光陀螺新的发展方向。相比于单轴机抖激光陀螺稳频控制方法[6-10],空间三轴机抖激光陀螺稳频控制需要实现三个轴同时稳频,由于每个压电陶瓷上控模电压的变化会同时引起两个轴腔长的变化,因此三个轴的光频控制相互牵连,空间三轴机抖激光陀螺的稳频控制较为复杂。
针对空间三轴机抖激光陀螺稳频控制问题,工程上,国内外普遍采用了直流稳频的控制方案,直流稳频控制方案是对三个压电陶瓷上的控模电压轮流采取两加一减和两减一加的方式进行分时控制,相当于将空间三轴陀螺三个轴的直流稳频控制转化为分时的单轴直流稳频控制,这种稳频控制方案对空间三轴激光陀螺稳频来说便于实现,但稳频精度和稳频效率低,影响了陀螺的性能。
提高空间三轴机抖激光陀螺稳频控制精度和稳频效率对提高陀螺精度,充分发挥空间三轴机抖激光陀螺的潜能有重要意义。交流稳频控制方法能同时对三个轴腔长失谐量进行解调与补偿,因此稳频控制精度和稳频效率高。研究空间三轴机抖激光陀螺的交流稳频控制方法对提高空间三轴机抖激光陀螺精度有重要意义。本文针对空间三轴机抖激光陀螺交流稳频控制方法,研究了控制过程,推导了系统函数,进行了系统参数仿真、PID参数优化和对比试验,证明该方法能较好地应用于空间三轴机抖激光陀螺谐振腔稳频控制,并提高空间三轴机抖激光陀螺的精度。
1 交流稳频系统原理
空间三轴机抖激光陀螺中,X轴、Y轴、Z轴三个谐振腔相互对称,三个腔内的激光光频分别通过空间三轴机抖激光陀螺腔体上的三个压电陶瓷 PZT1、PZT2、PZT3进行控制,如图1所示。
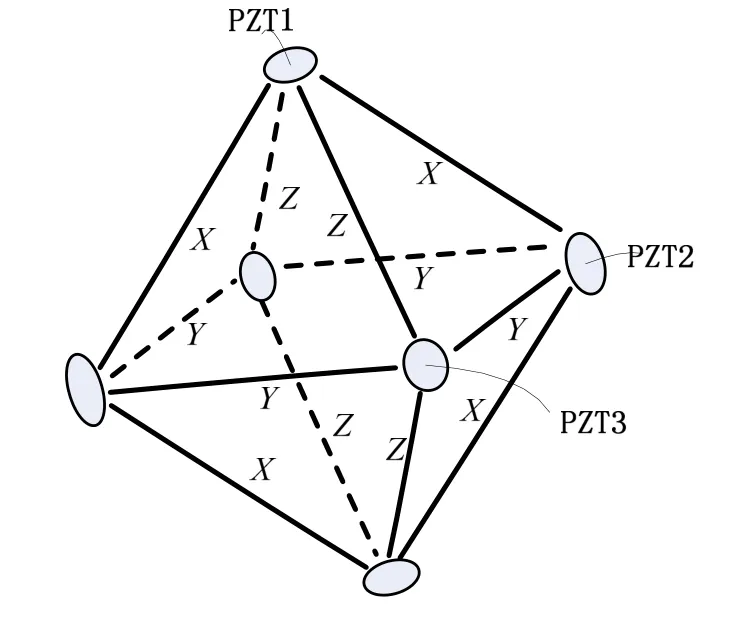
图1 空间三轴陀螺结构图Fig.1 Structure of the space three-axis laser gyro
在三个压电陶瓷PZT1、PZT2、PZT3的直流控模电压上分别施加同频同相位同幅值的正弦交流调制信号,使三个腔长发生同步的周期性的变化,三个轴内的激光频率也相应的周期性变化,从而引起光强调制,对三路光强信号分别进行去直滤波后可以得到每个轴的鉴频交流光强信号。解调中,使用与正弦交流调制信号同频的参考信号进行相敏解调,将三路参考信号相位进行延时处理使参考信号与其对应的鉴频交流光强信号相位差为0,三路鉴频交流光强信号经A/D转换后以其参考信号的正负半周期为基准分别累加其对应的鉴频交流光强信号正负半周期码值,将多个参考信号周期内的正负半周期信号A/D累加码值做差即为对应轴的误差信号码值,误差信号经过 PID控制和D/A转化作用于直流控模电压形成负反馈,从而实现空间三轴机抖激光陀螺三个轴的交流稳频控制。
根据图1中PZT1、PZT2、PZT3与谐振腔X轴、Y轴、Z轴的对应关系,可以得到三个压电陶瓷补偿信号与腔长信号的对应方程:
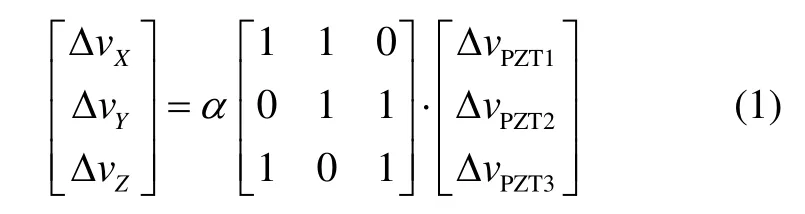

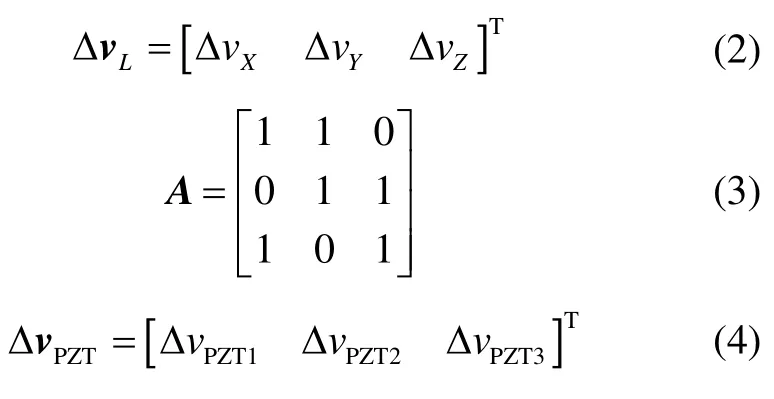
则式(1)可以写为:

易得到:
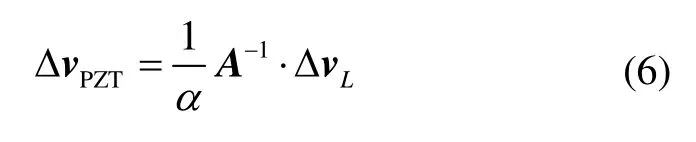


在稳频控制系统中,误差信号分配模块系统结构可以设为H=A-1,对A矩阵进行求逆运算,得到:
因此误差信号分配模块系统函数H如式(9)所示:

对压电陶瓷补偿信号vPZT进行PID控制产生压电陶瓷驱动信号来驱动压电陶瓷实现误差补偿,离散PID控制器表达式如式(10)所示:

式中:KP为比例系数,KI为积分系数,KD为微分系数,TI为积分时间常数,TD为微分时间常数,k为采样序号,T为采样周期,u(k)为第k次采样时刻控制器输出,e(k)为第k次采样时刻输入。
2 交流稳频系统建模
根据上述空间三轴机抖激光陀螺交流稳频解调原理分析,可以通过Simulink建模模拟系统阶跃响应,并对 PID的控制参数进行分析,对稳频控制系统的PID参数调节具有参考意义。
由原理分析可知,鉴频交流光强信号实质上为调制电压在增益曲线上的相干解调,因此我们将一个轴的增益曲线看作二次函数:

式中,U0为峰值电压,β为与增益曲线有关的常系数。
设调制电压为:

式(12)中ΔvL的值实际为腔长的失谐量,将其带入式(11),得到鉴频交流光强信号UPAC:

由于相敏检波只能解调出与调制信号同频的信号,因此经过隔直和带通后鉴频交流光强信号UPAC可以写成式(14):

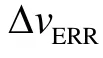


图2 稳频系统Simulink仿真框图Fig.2 Simulink diagram of the AC laser frequency stabilization system
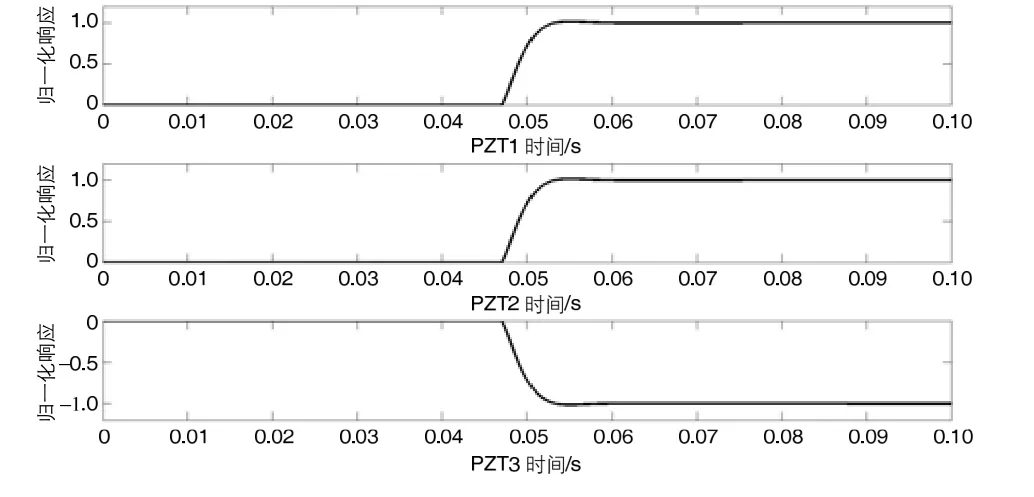
图3 PZT补偿信号阶跃响应仿真结果Fig.3 Simulation results of compensation signal step response
3 试验结果
将基于PID控制的交流稳频控制系统应用于国产某型空间三轴机抖激光陀螺上,调节三路PID控制参数得到较小响应时间和较短的超调量,三路PID控制参数值与仿真结果相近。对基于PID控制的交流稳频陀螺进行常温静态测试,测试时间为3600 s。与原直流稳频测试结果进行对比,测试结果如表1所示。基于PID控制的交流稳频控制方式将陀螺精度大致提高了0.003 (°)/h,其三路PZT码值变化和脉冲输出结果分别如图4和图5所示,可见基于PID控制的交流稳频陀螺PZT码值变化平稳,陀螺静态脉冲输出稳定。
表1 陀螺精度的对比试验结果Tab.1 comparison on gyros’ precisions (°/h)
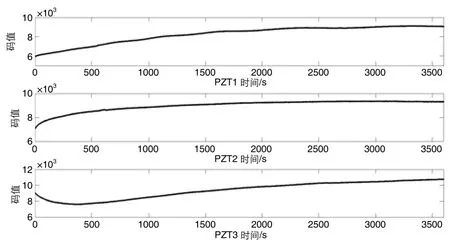
图4 PZT信号码值Fig.4 PZT signal code value
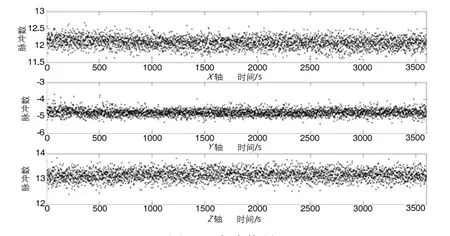
图5 脉冲信号Fig.5 Pulse signal
4 结 论
本文研究了空间三轴机抖激光陀螺交流稳频控制方法,并对PID控制参数仿真与优化,得到了较好的稳频控制系统响应。通过电子控制实现了空间三轴机抖激光陀螺交流稳频,并与直流稳频和等步长的交流稳频进行了对比试验,试验结果证明,通过PID参数调节后的空间三轴机抖激光陀螺交流稳频系统输出PZT码值变化平稳,陀螺静态脉冲输出稳定,能较好地提高空间三轴机抖激光陀螺谐振腔稳频控制的精度和效率,与原直流稳频方法相比,将空间三轴机抖激光陀螺的精度提高了20%。
(References):
[1] Wang Jian-zhong. Application and research of high precision data acquisition for laser gyro[J]. Advances in Natural Science, 2016, 9(2): 32-38.
[2] Liu Zhi-ping, Han Zong-hu. The technical situation and development tendency of foreign optical strapdown inertial navigation system[J]. Aerospace Control, 2012, 30(5): 94-99.
[3] Yu X D, Wei G, Long X W, et al. Finite element analysis and optimization of dither mechanism in dithered ring laser gyroscope[J]. International Journal of Precision Engineering and Manufacturing, 2013, 14(3): 415-421.
[4] Yang Y, Li J, Tang B. Design of high precision and low latency signal demodulating circuit on mechanically dithered ring laser gyro[J]. Computer Measurement & Control, 2015. 37(2): 178-182.
[5] Wen F, Li J. Design of laser gyro signal high-speed demodulation filter based on FPGA[J]. Application of Electronic Technique, 2014, 2(5): 45-52.
[6] 马家君, 蒋军彪, 刘健宁. 全反射棱镜式激光陀螺自适应稳频技术[J]. 光学学报, 2015, 35(3): 164-170. Ma Jia-jun, Jiang Jun-biao, Liu Jian-ning. Adaptive frequency stabilization technique for total reflection prism laser gyros[J] . Acta Optica Sinica, 2015, 35(3): 164-170.
[7] 韩宗虎, 胡晓东. 激光陀螺反射镜散射检测方法[J]. 中国惯性技术学报, 2015, 23(4): 540-543. Han Zong-hu, Hu Xiao-dong. Method of mirror scattering test for laser gyro[J]. Journal of Chinese Inertial Technology, 2015, 23(4): 540-543.
[8] Bondarenko E A. A laser gyro with a four-mirror square resonator: formulas for simulating the dynamics of the synchronisation zone parameters of the frequencies of counterpropagating waves during the device operation in the self-heating regime[J]. Quantum Electronics, 2014, 44(4): 364.
[9] Baker S M, Johnson D E. Systems and methods for a ring laser gyroscope with electrically isolated dither motor. US: 9551578[P]. 2017-1-24.
[10] 马家君, 蒋军彪. 全反射棱镜式激光陀螺稳频特性研究[J]. 中国激光, 2015, 42(1): 29-36. Ma Jia-jun, Jiang Jun-biao. Research on the frequency stabilization properties of total reflection prism laser gyros[J] . Chinese Journal of Lasers, 2015, 42(1): 29-36.
[11] Zou J, Yang J, Bangqian A. Low-cost integrated navigation system based on ARM and FPGA design[J]. Computer Measurement & Control, 2013, 13(2): 33-40.
[12] Klimkovich B V, Tolochko A M. A correcting filter for a mechanically dithered single-axis ring laser gyro[J]. Gyroscopy and Navigation, 2017, 8(1): 43-50.
Design of AC laser frequency stabilization system for space three-axis mechanical dithering laser gyro
WU Fan, ZHANG Ming-hui, FU Xin, GUO Xin, WANG Ji-liang, WANG Jing-xian
(Flight Automatic Control Research Institute, Xi’an 710065, China)
To design an AC laser frequency stabilization system for the space three-axis mechanical dithering laser gyro, the principle of the AC frequency stabilization system is analyzed, the system simulation model based on Simulink tool is built, and the experimental research is made. In the principle analysis, the control procedure of the system is analyzed, the system function is deduced, and the influence of PID parameters on the system response in the AC laser frequency stabilization is explored through the system simulation model based on Simulink tool. Then, the optimal PID parameters (KP=0.048, KI=0.0021, KD=0.0037) are obtained, which can provide reference for the system debugging. Finally, the test experiment is made by applying the AC laser frequency stabilization system into some Chinese-made space three-axis mechanical dithering laser gyro. The experiment results show that the PZT code value and the gyro pulse output of the AC frequency stabilization gyro are stable by using PID parameters control, and the precision of the space three-axis mechanical dithering laser gyro is increased by 20% compared with that by the original DC laser frequency stabilization control method.
space three axis; laser gyroscope; AC laser frequency stabilization; PID parameter
U661.1
A
1005-6734(2017)02-0265-04
10.13695/j.cnki.12-1222/o3.2017.02.024
2017-01-05;
2017-03-24
装备预先研究项目(51309010202)
吴凡(1988—),男,工程师,现主要从事激光陀螺控制技术研究。E-mail: wufan_franck@163.com
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:20
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
压电与声光(2019年1期)2019-02-22 09:46:06
军事文摘(2018年24期)2018-12-26 00:58:18
铜仁学院学报(2018年6期)2018-07-05 09:47:40
通信电源技术(2018年3期)2018-06-26 06:33:32
快乐语文(2018年36期)2018-03-12 00:56:02
电源技术(2015年11期)2015-08-22 08:50:36
电测与仪表(2015年10期)2015-04-09 11:48:02
