基于AMESim乘用车转向制动稳定性分析
2017-05-17 11:38崔淑华马良琳王宪彬
森林工程 2017年3期
崔淑华,马良琳,王宪彬
(东北林业大学,交通学院,哈尔滨 150040)
基于AMESim乘用车转向制动稳定性分析
崔淑华,马良琳,王宪彬
(东北林业大学,交通学院,哈尔滨 150040)
当车辆在弯道制动时,由于制动力矩过大,轮胎与路面间的摩擦力难以克服离心力,车辆失稳将导致安全事故发生。本文基于AMESim建立车辆模型,以车辆行驶横摆角速度和质心侧偏角作为评价指标,进行车辆转向制动的动力学分析。在固定半径和制动车速行驶工况下,仿真分析了车辆的临界制动力;在固定制动力矩和转向车速工况下,仿真分析了转向盘的临界转角。研究结果表明:制动力、转向盘转角等均对车辆转向制动的稳定性产生影响,超过临界值,车辆将失去稳定性。
弯道制动;AMESim;临界制动力;临界转角
0 引言
高速行驶的车辆在遇到弯道路况时,驾驶员前方视野较小,为了确保车辆的行驶安全通常会采取制动。在离心力和制动力共同作用下,车辆的动力性发生变化,使其偏离原来的行驶轨迹,影响了车辆的行驶安全性及稳定性[1-3]。在转向紧急制动时,制动力矩过大,车辆的离心力大于地面附着力,容易造成甩尾侧滑等不安全现象[4-6]。由于车辆转向制动对行车安全尤为重要,本文选用乘用车为研究对象,对车辆转向制动的动力学特性及车辆瞬时状态参数的变化进行研究,进而得出能反映车辆弯道制动行驶的状态参数。通过仿真,分析在固定转弯半径和制动车速工况下的临界制动力;固定制动力矩和车速时的转向盘临界转角。
1 仿真模型建立
AMESim工程系统仿真建模需要经过草图搭建、子模型匹配、参数设定建立仿真模型[7-9],本文建立的乘用车仿真模型如图1所示。该模型主要有制动、驱动、转向、悬架、后处理及路面系统等。制动系统中将液压缸的最大压力设为330 kPa;发动机的最大输出转矩为300 N.m;转向系统中的传动比为16;悬架系统中非线性特性的影响忽略;后处理系统主要负责数据的采集;路面附着系数设为0.7,更接近真实的干沥青路面。车辆的运行参数在该模型设定的仿真条件下进行求解。求解获得的参数将以数值、图像或者以某特定的文件格式输出,以便于处理不同研究目的下的车辆动力学仿真结果。

图1 整车仿真模型Fig.1 The simulation model of vehicle
2 车辆转向制动的动力学分析
2.1 “魔术公式”轮胎模型
“魔术公式”轮胎模型与实测的轮胎参数曲线都有较好的吻合,以致于大部分学者将它作为一个标准与其他模型进行对比分析。该模型通过试验数据拟合得到的公式与轮胎试验数据相比较,结果吻合较好,可以表达不同驱动下的轮胎特性[10]。广泛使用的“魔术公式”轮胎模型表达式为[11]:
y=Dsin[Carctan{bx-E(Bx-arctanBs)}]。(1)
Y(X)=y(x)+Svx=X+Sh。
(2)
式中:Y为输出变量纵向力Fx或侧向力Fy;X为输入变量侧偏角α或纵向滑移k;B为刚度因子;C为形状因子;D为峰值因子;E为曲率因子;Sh、Sv为水平、垂直偏移(考虑轮胎有初始侧偏角时的原点偏移)。
原点并“魔术公式”轮胎模型会产生一条曲线y(x),该曲线通过逐渐递增达到最大值后开始趋于水平。当系数B、C、D、E的值给出,得出的曲线呈现出关于原点不对称的形状。此时,由于侧偏力、滚动力等作用,使得Fx和Fy曲线不能通过原点,出现偏移量Sh、Sv。该公式得到的曲线与实际得到的侧向力Fy和纵向力Fx的曲线匹配较好[12-14]。
2.2 车辆转向行驶的动力学分析
车辆在弯道转向行驶时,轮胎与地面间的切向力可保证车辆向前行驶,与车辆行驶方向垂直方向上存在一个法向力,实现车辆的转向行驶。车辆在转向制动时,产生的侧向加速度可表示为:

(3)
式中:an为侧向加速度;vx为车辆行驶速度;R为转弯半径。
因此,作用在车辆上的总离心力为:
Fn=man。
(4)
式中:Fn为离心力;m为车辆总质量。
轮胎与地面间的法向力平衡掉车辆上的离心力,从而使车辆以一定的速度在预定的弯道上行驶[15]。地面的摩擦系数和轮胎侧偏特性是该法向力的主要影响参数。若地面摩擦系数足够大,则车辆转向行驶的最大安全速度由轮胎侧偏特性决定。
2.3 车辆制动受力分析
车辆制动指驾驶员在车辆行驶过程中,通过踩踏制动踏板使制动器工作,进而使车速逐渐降低甚至车辆停下来的过程[16-17]。车辆制动时,驾驶员通过踩制动踏板使摩擦片与制动器间产生一个与车轮转向相反的力矩,此力矩使轮胎与地面之间产生的与车辆行驶方向相反的力为地面制动力[18]。若地面附着系数足够大时,地面制动力可表示为:

(5)
式中:FXb为地面制动力;T为摩擦力矩;r为轮胎滚动半径。
3 乘用车转向制动临界制动力分析
本文建立了前轮驱动的乘用车模型,仿真条件为:气候条件为无风,转弯半径设置为200 m。本文为研究车辆转向制动时的临界制动力,将地面附着系数条件固定,为更接近真实路面,因此将地面附着系数设为0.7,选用跟踪方法进行控制分析。车辆行驶车速为65 km/h时,制动踏板力逐步增加,当制动踏板力由20 N增加到22 N时,车辆的质心侧偏角和横摆角速度的变化较为明显,所以选择20、21、22N三个制动踏板力作为试验数据,进行仿真分析。车辆在转弯制动时,若初始速度较大,但由于制动力矩和轮胎侧偏的共同作用,车轮的滑移率逐渐增大,即使施加的制动力较小也会使车辆很快失去稳定性,得出的车辆质心侧偏角和横摆角速度的曲线变化如图2和图3所示。

图2 车速65 km/h质心侧偏角变化曲线(固定弯道半径)Fig.2 The changing curve of sideslip angle at the speed of 65 km/h (fixed corner radius)
从图2和图3看以看出,车辆在半径为200 m的弯道上以65km/h的速度转向行驶,当制动踏板力为20 N时,车辆的质心侧偏角和横摆角速度都接近于0且随时间变化的幅度很小,说明此时车辆处于稳定状态;当踏板力增大到21 N时,车辆的质心侧偏角和横摆角速度的变化趋势与20 N时相似;当制动踏板力增大到22 N时,车辆的质心侧偏角和横摆角速度呈大幅度波动,表明车辆的不稳定性不断增大,这时车辆处于失稳状态。因此在车速为65 km/h时,21 N接近临界制动踏板力,此时作用在制动器上的制动力为432 N。

图3 车速65 km/h横摆角速度变化曲线(固定弯道半径)Fig.3 The changing curve of yaw rate at the speed of 65 km/h (fixed corner radius)
在车辆行驶弯道半径固定的条件下,当制动踏板力小于临界值时,车辆处于稳定行驶状态,制动踏板力大于临界值时,此时的地面制动力已达到峰值,无法满足车辆制动和沿着弯道行驶的需求,车辆出现失稳现象。
4 乘用车转向盘临界转角的分析
在制动力固定的条件下,分析转向盘转角对车辆稳定性的影响。车辆作用在制动盘上的制动力矩设为450 N·m;地面附着系数设为0.7;仍将横摆角速度和质心侧偏角作为输出结果。车辆行驶车速为65 km/h,经过仿真试验可得,车辆转向盘转角从11°增加到13°时车辆的质心侧偏角和横摆角速度的变化较为明显,所以选择11°、12°、13°这三个转角作为试验数据,进行仿真分析。车辆在转弯制动时,若初始速度较大,但由于路面附着系数和轮胎侧偏特性的共同作用,即使转向盘转角较小,也会使车辆很快失去稳定性。得出的车辆质心侧偏角和横摆角速度的曲线变化如图4和图5所示。
从图4和图5分析可见,车辆以65 km/h速度进行转向制动时,在车辆转向盘三种转角条件下均施加制动力,从车辆的质心侧偏角和横摆角速度变化曲线中可以分析出,车辆转向盘转角为11°和12°时,质心侧偏角和横摆角速度接近于0且随时间变化幅度很小,车辆处于平稳状态,当车辆转向盘转角为13°时,质心侧偏角和横摆角速度呈大幅度波动,车辆处于失稳状态,因此车速为65 km/h时,12°为接近临界转向盘转角。
在制动力固定的工况下,高速转向制动和过大的转向盘转角,将使车辆失去稳定性。
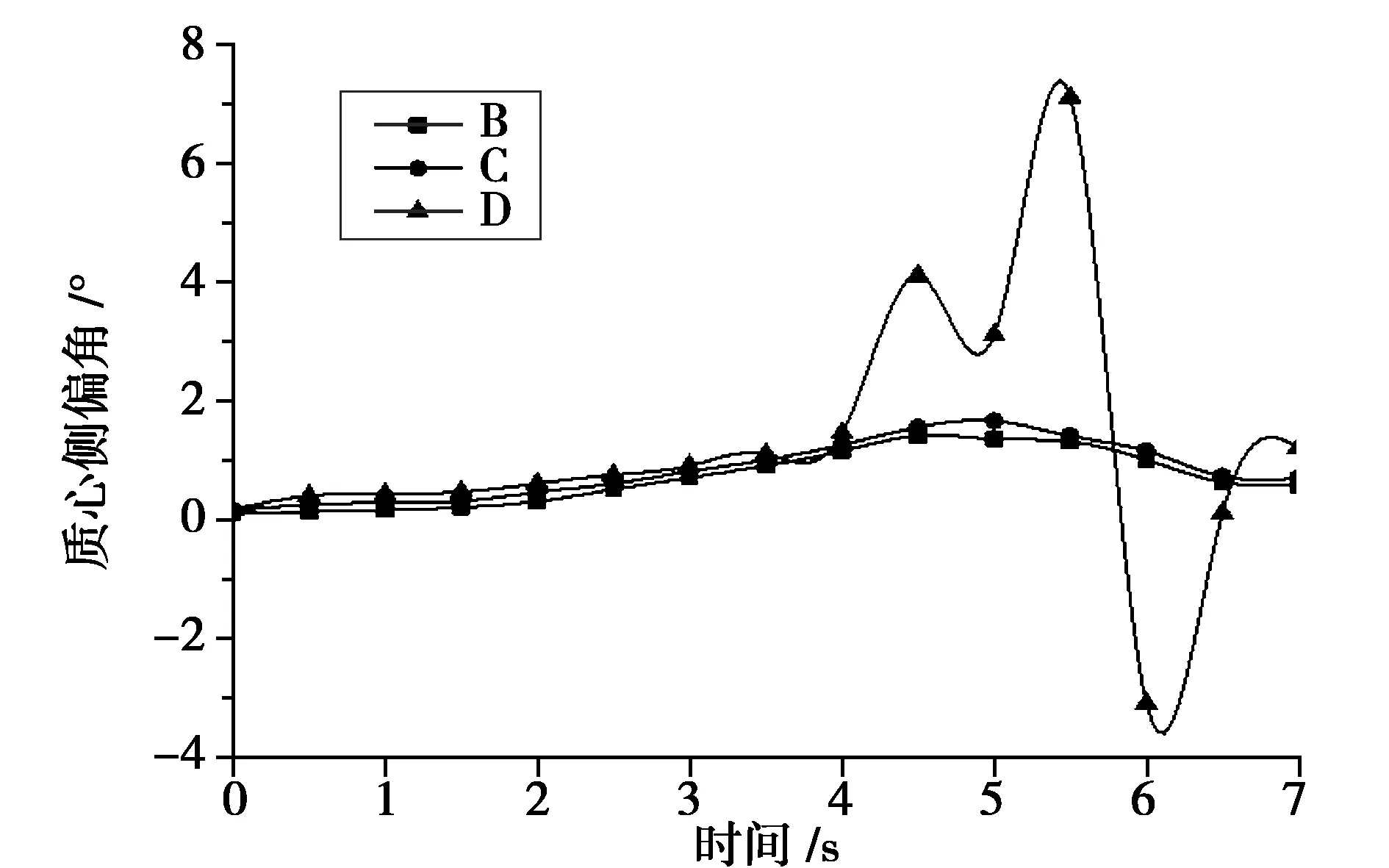
图4 车速65 km/h质心侧偏角变化曲线(固定制动力矩)Fig.4 The changing curve of sideslip angle at the speed of 65 km/h (fixed braking torque)
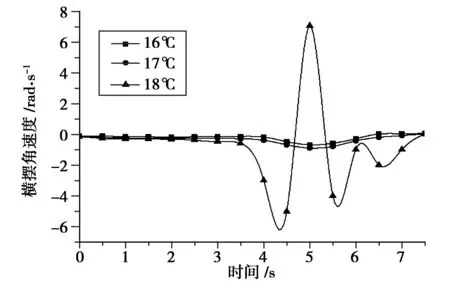
图5 车速65 km/h横摆角速度变化曲线(固定制动力矩)Fig.5 The changing curve of yaw rate at the speed of 65 km/h (fixed braking torque)
5 结论
本文对车辆转向制动稳定性进行了仿真分析,分析结果表明:汽车在转弯制动工况下,车速较高时,车辆对制动力矩和转向盘转角的变化都非常敏感,较小的制动力或转向盘转角都会对车辆的稳定性产生影响,存在使车辆失去稳定性的临界值。若制动和转向两种操作同时作用会使车辆发生侧滑、甩尾现象,甚至引发严重的交替事故。因此,从驾驶操作上应避免紧急转向制动,同时应提高车辆稳定性控制能力。
[1]郭孔辉,轧浩.四轮转向的控制方法的发展[J].中国机械工程,1998,9(5):73-75.
[2]Li SH,Yang SP,Chen LQ,et al.Investigation on cornering brake stability of a heavy-duty vehicle based on a nonlinear three-directional coupled model[J].Applied Mathematical Modelling,2016,40(13-14):6310-6323.
[3]Michihisa I,Hiroki T,Toho O,et al.Steering/braking control of articulated vehicle for small turning[J].IFAC Proceedings Volumes.2010,43(26):197-202.
[4]Qian L,Pierangelo G,Antonio T,et al.Enhancing vehicle cornering limit through sideslip and yaw rate control[J].Mechanical Systems and Signal Processing.2016,75:455-472.
[5]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
[6]祁永宁,陈南,李普.四轮转向车辆的直接横摆力矩控制[J].东南大学学报自然科学版,2004,34(4):451-454.
[7]付永领,齐海涛.LMS Imagine.Lab AMESim 系统建模和仿真[M].北京:北京航空航天大学出版社,2011.
[8]Tetsuya K,Ichiro K.A study on the braking stability of vehicles[J].JSAE Review.2003,24(2):157-164.
[9]Hac A,Fulk D,Chen H.Stability and control considerations of vehicle-trailer combination[J].Sae International Journal of Passenger Cars Mechanical Systems,2009,1(1):925-937.
[10]陈聪,陈乐生.汽车操纵稳定性动力学建模及其在人_车_路闭环系统中的应用[J].福州大学学报,2008,36(2):255-259.
[11]贺宜,褚端峰,吴超仲,等.路面附着条件对车辆横向稳定性影响的量化分析[J].武汉理工大学学报:交通科学与工程版,2014,38(4):784-787.
[12]金智林.运动型多功能车辆侧翻稳定性及防侧翻控制[D].南京:南京航空航天大学,2008.
[13]富子丞.营运客车侧翻稳定性及其控制算法研究[D].西安:长安大学,2012.
[14]孙川,吴超仲,褚端峰,等.基于车辆侧向稳定性分析的弯道行驶安全评价[J].交通信息与安全,2014,32(6):95-100.
[15]郭孔辉,卢荡.轮胎稳态侧倾力学特性理论建模[J].中国机械工程,2001,12(5):589-592.
[16]王德平,郭孔辉,宗长富.车辆动力学稳定性控制的理论研究[J].汽车工程,2000,22(1):7-9.
[17]Simone F,Pierpaolo D F,Mara T,et al.Model-free control for active braking systems in sport motorcycles[J].IFAC Proceedings Volumes,2010,43(14):873-878.
[18]Enache N M,Mammar S,Glaser S,et al.Driver assistance system for lane departure avoidance by steering and differential braking[J].IFAC Proceedings Volumes,2010,43(7):471-476.
Stability Analysis of the Steering and Braking forthe Passenger Vehicle Based on AMESim
Cui Shuhua,Ma Lianglin,Wang Xianbin
(College of Transportation,Northeast Forestry University,Harbin 150040)
The friction between tire and pavement is difficult to overcome the centrifugal force due to the large braking torque when the vehicle is in cornering braking,and thus the vehicle instability will lead to accidents.This study established a vehicle model based on AMESim.Vehicle yaw rate and sideslip angle were used as the evaluation indexes to conduct dynamics analyses of the vehicle steering and braking.Under the condition of braking speed and fixed radius,the critical braking force of the vehicle was simulated and analyzed.The critical angle of steering wheel was simulated and analyzed under the condition of steering speed and fixed braking torque.The results showed that braking force and steering angle of vehicle have effects on the stability of steering and braking,and the vehicle will lose stability if they exceed the critical value.
cornering braking;AMESim;critical braking force;critical steering angle
2016-12-02
黑龙江省自然科学基金项目(E2015052);中央高校基本科研业务费专项资金资助(2572015CB15)
崔淑华,硕士,教授。研究方向:汽车节能减排技术的研究。E-mail:csh1218@163.com
崔淑华,马良琳,王宪彬.基于AMESim乘用车转向制动稳定性分析[J].森林工程,2017,33(3):100-103.
U 463.4
A
1001-005X(2017)03-0100-04
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
航天器工程(2014年5期)2014-03-11
铁道建筑(2010年11期)2010-07-30