木塑窗角电磁感应加热及其参数控制
2017-05-17 11:38王子云赵辉王天琪
森林工程 2017年3期
王子云,赵辉*,王天琪
(1.生物质材料科学与技术教育部重点实验室(东北林业大学),哈尔滨 150040;2.哈尔滨轴承制造有限公司,哈尔滨 150036)
木塑窗角电磁感应加热及其参数控制
王子云1,赵辉1*,王天琪2
(1.生物质材料科学与技术教育部重点实验室(东北林业大学),哈尔滨 150040;2.哈尔滨轴承制造有限公司,哈尔滨 150036)
熔焊-电磁感应复合连接技术是连接木塑窗角的一种有效方式。但由于热惯量的存在,电磁感应连接过程中往往会出现过热现象,导致木塑材料碳化或热量不足,最终会影响窗角的连接效果。为解决这一问题,本文提出在传统PID控制系统中引进Smith预估器(Smith-PID控制系统)来准确快速地控制电磁加热过程中的温度。首先制备好70型木塑窗扇型材试件,通过正交试验获取窗角电磁加热连接的基本参数;之后开始相同参数(由上步获得)的Smith-PID控制系统及其他传统控制方式的电磁加热仿真实验,并对比实验结果。实验结果表明,Smith-PID控制系统稳定到达期望温度用时最少,为2.79、3.27、3.49 s。Smith-PID控制系统能够有效降低过热量,使加热温度较快较准地到达期望值,避免碳化现象和热量不足,从而提高窗角的连接强度。
木塑窗;电磁加热;PID控制;Smith预估器
0 引言
木塑复合材料(Wood-plastic Composites简称WPC)挤出成型可以制作窗框型材,这种窗户具有环保节能、防水阻燃、木质感强等优点。木塑窗角的连接方式是关键问题,引起有关学者的关注[1]。日渐受到重视的熔焊-电磁感应加热复合连接方式,虽然能较好地克服单一连接方式的缺陷,但其在电磁加热控制方式上也存在着明显的不足,其输出频率和输出电压为固定值,没有闭环控制,不能保持恒温加热,致使出现过热现象或加热不足,制约了加热效率和连接质量的提高[2-3]。本试验取挤出型工艺生产的木塑复合材料作为研究试件,采用熔焊-电磁感应加热复合连接技术连接木塑窗。其中,在电磁感应加热环节引进Smith-PID温控系统,本文着重探究该系统在木塑窗电磁加热连接过程中对温度控制的改善作用。
1 电磁感应加热在木塑窗角复合连接中的应用
由法拉第电磁感应原理可知,高速变化的高频电流流经线圈会产生高速变化的交变磁场,电能转化为磁能,磁场内的磁力线通过木塑窗角内的钢衬材料在钢衬体内产生无数的小涡流,致使钢衬铁原子无规则剧烈摩擦而自身产生热量[4]。此热量可供窗角内部的热熔材料(聚乙烯、聚丙烯或者其他热熔混合材料)融化,然后凝固形成窗角填充连接物,或者称之为角码。
电磁加热是熔焊-电磁感应加热复合连接的重要环节。在复合连接过程,首先对木塑窗角型材进行熔焊连接,然后进行电磁加热。电磁加热过程如上所述,利用产生交变磁场来获取热能进行加热。该复合连接技术和传统连接技术相比,具有以下特点:
(1)完成二次加强连接,具有较高的连接强度。
(2)熔焊和电磁加热均属于快速成型的连接,加热速度快,可缩短预热和升温时间。
(3)电磁加热由于是金属自身发热,所以热效率高,散热少,可以改善车间的工作环境。
(4)电磁加热,工件受热均匀,改善了连接效果。
2 通过正交试验获取电磁加热参数
实验按照质量分数各称取50份聚乙烯(PE)和木粉(WF)及若干加工助剂,经过混和、挤压成型,制备好70型木塑平开窗窗扇型材试件(如图1所示),木塑窗内部结构示意图如图2所示。
实验仪器及设备:GPH-36微型感应加热设备(郑州日佳电源加热设备有限公司);SHZ4-100x4500塑料门窗4位焊接机(济南精工新亚机器有限公司);红外热像仪(美国福禄克公司);SJS-20数显式角强度试验机(济南大唐伟业科技发展有限公司)。
熔焊-电磁感应加热复合连接试验:参考前人对木塑窗角熔焊连接的实验成果,初步将熔焊的焊接参数设定为左右进给压力0.2 MPa、前后压钳压力0.4 MPa、焊接时间60s、加热时间50 s、焊接温度260 ℃。

图1 70型木塑平开窗窗扇型材图Fig.1 70 model WPC casement graph

图2 木塑窗内部截面示Fig.2 WPC window inner cross-sectional graph
在电磁感应加热连接中,影响窗角连接的主要参数为输出振荡频率及加热时间。输出振荡频率40~60 kHz,每10 kHz递增重复一次试验;加热时间选取35~60 s,每5 s递增重复一次试验。共25组,每组包含3个相同试样。
加热完成后,将连接好的窗角完全冷却,之后放在角强度试验机下进行检测,记录窗角受压弯曲断裂时压力的最大值(Fc)。由公式(1)可计算出窗角试件受压弯曲应力(σc)
(1)
分析试验结果初步发现,在初次焊接参数相同的条件下,试件的最大受压弯曲力出现在加热时间55 s,输出振荡频率50 kHz时,此时受压弯曲力为3 952 N[5];按照公式(1)计算,试件受压弯曲应力为26.97 MPa。
角强度测试后,将木塑窗角分离,其断面如图3所示。发现填充物质熔化充分,特别是在断面交接处,并且未发现加热损伤原有的窗角结构。

图3 木塑窗角破坏图Fig.3 WPC window corners destroying graph
3 基于Smith-PID温控系统的电磁加热
3.1 传统PID的温控加热系统
普通电磁感应加热参数固定,其动态特性具有滞后大、惯性大、干扰强和非线性等典型特点,难以达到理想的加热连接效果[6]。因此,可以考虑在电磁感应中引用PID温控系统达到恒温加热的目的[7-9]。
电磁感应加热连接木塑窗角的方法主要是利用感应加热产生的能量熔化塑料颗粒,依据冷却后形成的塑料角码的情况来判断窗角连接是否可靠,所以感应加热的能量参数是其主要影响因素。影响感应加热温度和加热速度的参数是比功率和加热时间[10]。
比功率P0指单位时间向工件单位表面积提供的能量大小,它决定了加热层向内部的加热速度和涡流透入层的温度。比功率P0可表示为:

(2)
式中:F为工件同时被加热的表面积,cm2;W为加热工件表面所得到的功率,kW。
理论比功率值根据不同的加热规范有相应的范围,实际的比功率值须考虑具体的因数影响,实际比功率P0可表示为:

(3)式中:K0为取决于感应线圈和工件几何尺寸的系数;Ii为取决于感应加热电流,A;ρ为工件电阻率,Ω·m;为工件相对磁导率;μ为电流频率,Hz。
本试验通过固定其他参数,控制感应加热电流Ii的输出来控制加热温度。PID控制系统由PID控制器和被控对象组成。其中,PID控制器根据期望目标值r(t)与实际输出值y(t)的控制偏差e(t)进行计算,将此偏差的比例、积分和微分部分通过线性组合构成线性控制量,作为输出量来控制被控对象。该控制的特点是简单易操作,即只需整定控制器3个参数,分别为比例系数Kp,积分系数Ki及微分系数Kd,并且可以获得较为满意的结果[11]。控制器控制方程为
e(t)=r(t)-y(t)。
(4)
控制器时域输出u(t)方程为
U(t)=Kp×e(t)+Ki×∫e(t)dt+Kd×de(t)/dt。
(5)
在本试验中,U(t)为感应电流输出,e(t)为设定加热温度与实际加热温度之差。采用本文第2节中复合连接正交试验中得出的最佳加热参数,即在输出振荡频率为50 kHz的条件下,通过PID控制器调节感应电流来控温。PID控制器的参数Kp、Ki和Kd可以根据过程的动态特性进行整定[12-13],其整定方法较多,常用的有经验法、工程整定法、理论值计算法等,在工程中采用最多的是实验经验法,如Cohen-Coon整定公式、Ziegler-Nichols整定公式等[14]。
3.2 Smith-PID的温控加热系统
在PID过程中,钢衬温度不会随着感应电流的变化立即变化,存在严重的滞后现象,导致较大的超调,从而延长了加热时间,降低了加热效率[15]。为此,在传统的PID控制器基础上,引入Smith预估器。Smith预估算法是克服纯滞后的有效控制办法。其基本原理是通过预估被控制对象的动态特性,用一个预估模型来补偿时间滞后,被控对象与补偿器共同组成了一个没有时间滞后的广义被控对象。这样,控制器等同于对一个没有时间滞后的系统进行控制,从而较为有效地克服了纯滞后的影响[16-17],如图4所示。

图4 Smith预估器方框图Fig.4 Smith Predictor block diagram
由图4得到系统的闭环传递函数:

(6)
其中,理想情况下,Go(s)=Gm(s),n和m相等。
在本实验中,Go(s)是被控对象中不含时间滞后的部分,Gm(s)(1-e-ms)是Smith预估器,Gc(s)是PID控制器的传递函数。由公式(5)可知,将Smith预估器连入传统PID控制器中后,整个系统传递函数的特征方程中不含有滞后环节,闭环部分等同于有时滞部分和无时滞部分的串联,其温度输出曲线和性能指标均与Go(s)(不含纯滞后的对象部分)完全相同,只是在时间上相差一个n的延迟[18]。
3.3 仿真和分析
为研究方便,简化加热过程木窗的散热模型为热传导和热辐射的复合传热模型[19]。下面对电磁加热仿真模型做出必要解释。由电磁感应定律可知,钢衬在加热过程中为发热源,填充物质为温度控制对象。假设由电磁能转换为钢衬内能不占用时间,且物质由吸收热量到温度上升过程的时间忽略不计,则整个加热过程中的时滞现象主要由传热和散热造成,即热量由钢衬传到填充物的传热过程和热量由填充物散发到木塑窗型材及外界的散热过程。近似地,将热量由钢衬转移到填充物及木塑窗型材的过程看做热传导模型(由于填充物充满密闭的木塑窗型材中,所以忽略其流动性对传热的影响),热量由木塑窗型材散失到外界的过程看做热辐射模型。

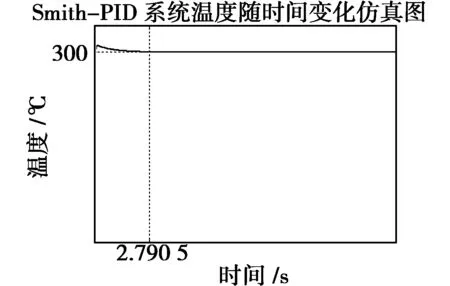
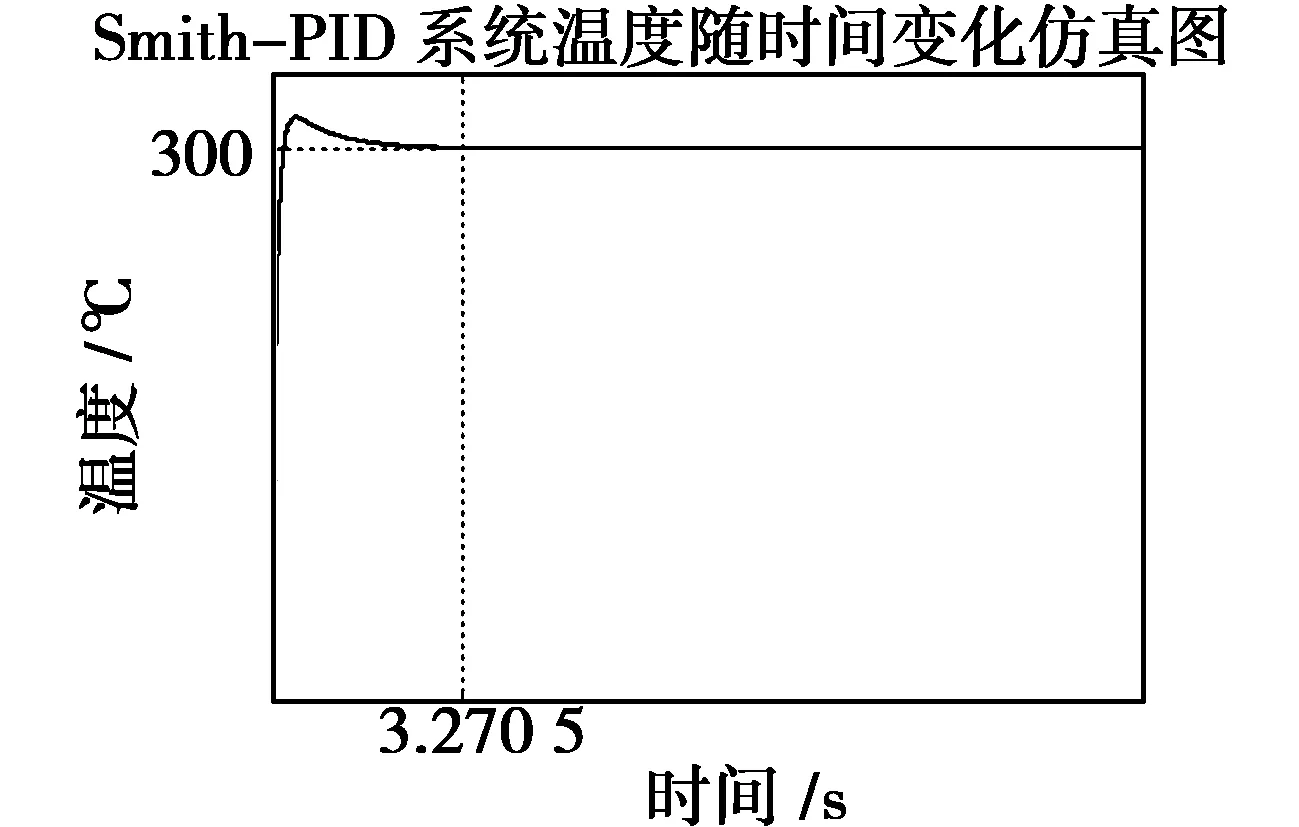
通过以上电磁加热模型的分析,在加热时间55 s,输出振荡频率50 kHz的条件下,利用matlab软件对系统中钢衬温度随时间的变化进行仿真。为使实验结论更具普适性,根据木塑窗型的尺寸大小,把仿真实验分为三组分别进行(第1组型材尺寸较小,第2组型材尺寸中等,第3组型材尺寸较大),每组都包含开环控制加热,PID控制加热,Smith-PID控制加热三个部分。设置钢衬的期望温度为300 ℃,经反复试验,选取比例系数为100,积分系数为3,微分系数为1。得到如下3组变化曲线,如图5-7所示。
由仿真结果分析得出:对不同尺寸大小木塑窗角进行电磁加热,开环控制的加热系统超过300 ℃后继续持续升温,且达到期望温度用时较长。3组实验中,传统PID控制和Smith-PID控制分别在3.26,7.22,11.89 s和2.79、3.27、3.49 s时,基本稳定在设置的期望温度附近。此外,由仿真曲线可知,在不同尺寸的型材加热中,相比传统PID单一控制,Smith-PID控制器都能较好地克服传统PID控制的滞后和超调问题,使加热温度较快较准地达到期望值,且具有一定的普适性。
4 结论
在加热时间55 s,输出振荡频率50 kHz的基本条件下进行木塑窗角的电磁加热,将Smith预估器引入到传统的PID控制系统来控制加热过程,能明显改善加热系统的准确性和快速性,使得加热温度更快更准地到达所期望的加热温度,从而能比较好地降低过热量,避免木塑窗角的碳化现象和热量不足现象,提高窗角的连接强度。由于该控制电路设计的复杂性,其在实际应用中 还存在着一些障碍,但仍对生产生活具有一定的借鉴意义。

(a)开环控制 (open loop control)

(b)传统PID控制 (traditional PID control)
(c)Smith-PID控制 (Smith-PID control)图5 第1组仿真曲线图Fig.5 The first group of simulation graphs

(a)开环控制 (open loop control)

(b)传统PID控制 (traditional PID control)
(c)Smith-PID控制 (Smith-PID control)图6 第2组仿真曲线图Fig.6 The second group of simulation graphs

(a)开环控制 (open loop control)

(b)传统PID控制 (traditional PID control)

(c)Smith-PID控制 (Smith-PID control)图7 第3组仿真曲线图Fig.7 The third group of simulation graphs
[1]李光哲.木塑复合材料的研究热点及发展趋势[J].木材加工机械,2010,21(2):41- 44.
[2]冯桂宏,于建英,张炳义.新型电磁加热塑化机聚合物流动及传热分析[J].塑料工业,2015,43(6):78-82.
[3]冯桂宏,陈思旭,于建英,等.塑化机料筒与螺杆双边电磁感应的加热技术[J].塑料,2016,45(1):108-110+114.
[4]赵宗彬,朱斌祥,杨大力等.电磁加热节能技术在挤塑机加热系统中的应用研究[J].塑料工业,2014,42(2):72-74.
[5]王天琪.木塑窗电感热融角码连接技术研究[D].哈尔滨:东北林业大学,2016.
[6]庞丽萍,曲洪斌,王浚.电加热模糊PID控制及仿真研究[J].计算机应用研究,2004,21(9):225-226.
[7]Duka A V,Dulǎu M,Oltean S E.IMC Based PID Control of a Magnetic Levitation System[J].Procedia Technology,2016,22(22):592-599.
[8]Xiong F R,Qin Z C,Carlos H.A Multi-objective Optimal PID Control for a Nonlinear System with Time Delay[J].Theoretical & Applied Mechanics Letters,2013,3(6):37-42.
[9]Yadav S,Verma S K,Nagar S K.Optimized PID Controller for Magnetic Levitation System[J].IFAC Papers On Line,2016,49(1):778-782.
[10]邹德涛.U75V重轨电磁感应加热温度场的研究[D].沈阳:辽宁科技大学,2014.
[11]Etedali S,Sohrabi M R,Tavakoli S.Optimal PD/PID Control of Smart Base Isolated Buildings Equipped with Piezoelectric Friction Dampers[J].Earthquake Engineering and Engineering Vibration,2013(1):39-54.
[12]Mo J S,Qiu Z C,Wei J Y.Adaptive Positioning Control of an Ultrasonic Linear Motor System[J].Robotics and Computer Integrated Manufacturing,2017,44:156-173.
[13]Liu F C,Liang L H,Gao J J.Fuzzy PID Control of Space Manipulator for Both Ground Alignment and Space Applications[J].International Journal of Automation & Computing,2014,11(4):353-360.
[14]师黎,丁海.PID控制的参数模糊自整定方法[J].郑州工业大学学报,2001,22(3):25-27.
[15]Ilssar D,Bucher I,Flashner H.Modeling and Closed Loop Control of Near-field Acoustically Levitated Objects[J].Mechanical Systems and Signal Processing,2016,85:367-381.
[16]Ji Y F,Zhang D H,Sun J,et al.Smith Prediction Monitor AGC System Based on CPSO Self-Tuning Pi Control[J].Journal of Iron And Steel Research,International,2010,17(2):22-26.
[17]张爱娟,胡慕伊,黄亚南.基于专家PID和模糊PID的双模态改进型Smith预估器在苛化工段的应用[J].中国造纸,2016,35(3):43-48.
[18]朱晓东,王军,万红.基于Smith预估的纯滞后系统的控制[J].郑州大学学报(工学版),2004,25(1):77-81.
[19]高印寒,高洪,刘长英,等.电磁感应加热温度场建模方法的研究[J].内蒙古师范大学学报(自然科学汉文版),2007,36(1):54-57.
Wood-Plastic Composition Window Corners’ ElectromagneticHeating and Parameters Controlling
Wang Ziyun1,Zhao Hui1*,Wang Tianqi2
(1.Key Laboratory of Bio-based Material Science and Technology of Ministry of Education,Northeast Forestry University,Harbin 150040;2.Bearing Manufacturing Co.,Ltd,Harbin 150036)
The combination of welding and electromagnetic heating connection technology is an effective method to connect WPC window corners.However,because of the unstable thermal inertia,overheating tends to appear during electromagnetic heating,which causes the WPC carbonized or lack of heat and will eventually affect the corners connection effect.In order to solve the problem,this paper proposes a Smith-PID control system by adding the Smith Predictor to the traditional PID control system,which can be used to control the temperature accurately and quickly.First,a 70 model WPC sample was prepared to do the orthogonal experiments to acquire the basic electromagnetic heating parameters.Second,the electromagnetic heating simulation experiments were made with the same parameters(obtained from the previous step)based on Smith-PID and other traditional control system.Finally,we compared the experiment results,which showed that Smith-PID control system used the least time to reach the stable expected temperature,2.79 s,3.27 s and 3.49 s respectively.It can reduce overheating effectively and make sure the electromagnetic heating temperature reaches the expected point quickly.It can also avoid carbonization and lack of heat and improve connection strength of corners.
Wood-Plastic composition window;electromagnetic heating;PID controller;Smith predictor
2016-03-09
黑龙江省科学基金项目(LC2016014);东北林业大学教育教学研究项目(DGYZD2016-02)
王子云,本科生。研究方向:机电一体化。
*通信作者:赵辉,博士,副教授。研究方向:可持续设计与制造。E-mail:zhaohv@163.com
王子云,赵辉,王天琪.木塑窗角电磁感应加热及其参数控制[J].森林工程,2017,33(3):53-57.
TS 611;TU 758.14
A
1001-005X(2017)03-0053-05
猜你喜欢
水电站机电技术(2022年4期)2023-01-12
科技创新与应用(2021年29期)2021-10-18
中国设备工程(2021年16期)2021-04-03
宇航材料工艺(2020年4期)2020-09-27
科学与财富(2019年30期)2019-10-30
制造技术与机床(2017年3期)2017-06-23
中国塑料(2017年2期)2017-05-17
材料科学与工程学报(2016年1期)2017-01-15
中国塑料(2016年3期)2016-06-15
中国塑料(2015年10期)2015-10-14