
某混合动力汽车非稳态车内声品质评价研究
2017-04-25 06:50华敏相左言言吴赛赛
噪声与振动控制 2017年2期
华敏相,左言言,吴赛赛
(江苏大学振动噪声研究所,江苏镇江212013)
某混合动力汽车非稳态车内声品质评价研究
华敏相,左言言,吴赛赛
(江苏大学振动噪声研究所,江苏镇江212013)
针对某混合动力汽车非稳态工况下的车内声品质评价进行研究。采集该车内不同位置、不同驱动模式以及不同车速情况下的车内噪声样本,对不同的非稳态工况进行客观参量分析,得出电机单独驱动模式下可以用尖锐度评价非稳态车内声品质、混合驱动与发动机单独驱动模式下可以用响度评价非稳态车内声品质的结论。基于BP神经网络模型,进行基于心理声学客观参量与临界频率带解析小波分解的非稳态车内声品质评价,预测结果表明后者的预测效果优于前者,且稳定性较高。
声学;声品质;主客观评价模型;神经网络;解析小波分解;非稳态
新能源汽车作为国际汽车行业新趋势之一,近年来在政府的大力支持下得到了飞速的发展。其中,混合动力汽车结合了电动汽车高效性和汽油机车便捷的优点,在节能减排上的突出优势也积极迎合政府的要求。目前,关于混合动力汽车的研究越来越受到重视,与此同时,混合动力汽车的产销量同时也得到了稳步提升。在混合动力汽车保有量稳步增长的同时,其各项关键技术取得了较大突破,特别是在排放和节能性能上有了较大发展。然而针对混合动力汽车振动和噪声的研究却没有得到广泛而深入的开展。
混合动力汽车相对于传统内燃机汽车而言,动力源的增加和它的分布特点及其根据路面情况不断变化的工作模式,导致其车内与车外噪声的特性和传递路径发生了较大的变化,也使车内声品质影响因素及噪声源贡献度的研究也愈加困难,不同工作模式间动力切换产生的振动冲击和噪声,对乘员乘坐舒适度有较大的影响。虽然混合动力汽车车内噪声声压级有所降低,但就声品质而言,乘坐的舒适性并没有太大提高[1],在某些特定工况下的振动和噪声反而令乘员感觉更加不适,因此对混合动力汽车车内声品质特性进行分析与研究是很有必要的。
以某款混合动力汽车为研究对象,研究不同驱动模式、不同车速以及车内不同位置的车内声品质变化,并针对非稳态的数据建立车内声品质评价模型。研究结果对于低频振动与高频噪声的控制以及整车控制策略制定有重要意义。
1 声样本采集及前处理
1.1 车内噪声采集试验
为了进行非稳态工况下车内声品质评价研究,需进行车内噪声采集试验以获得不同驱动模式、不同车速下的车内噪声样本,试验对象为某款混合动力汽车。试验严格按照GB/T18697—声学汽车车内噪声测量方法进行,测试路段选择在车辆、人员稀少且较空旷的路段,采用HEAD Acoustics的便携式声音分析仪SQuadriga I和双耳麦克风采集车内噪声样本。主驾驶座上的人员配戴着双耳麦克风,即保证采集的信号是主驾驶座位的声音信号,此外主驾驶还要负责汽车运行工况的稳定。副驾驶座上的人员用便携式声音分析仪SQuadriga I采集声音信号。
1.2 声样本前处理
样本采集过程往往会受到诸多因素的干扰,导致声样本不稳定甚至无效。通过软件回放剔除三个严重受干扰的声信号,得到完好的独立的非稳态车内噪声样本。在ArtemiS 12.0中用Merge Editor对声样本进行截取,截取长度为1s。
为了避免由于响度差异引起的主观评价偏差,还要对声样本进行等响处理。非稳态样本等响处理参考样本8的响度值7.82 sone,在进行修正之后,样本响度均在7.82 sone左右,这样可以有效避免由于响度的掩蔽效应引起的主观评价结果偏差。最终得到18个非稳态噪声样本,如表1所示。
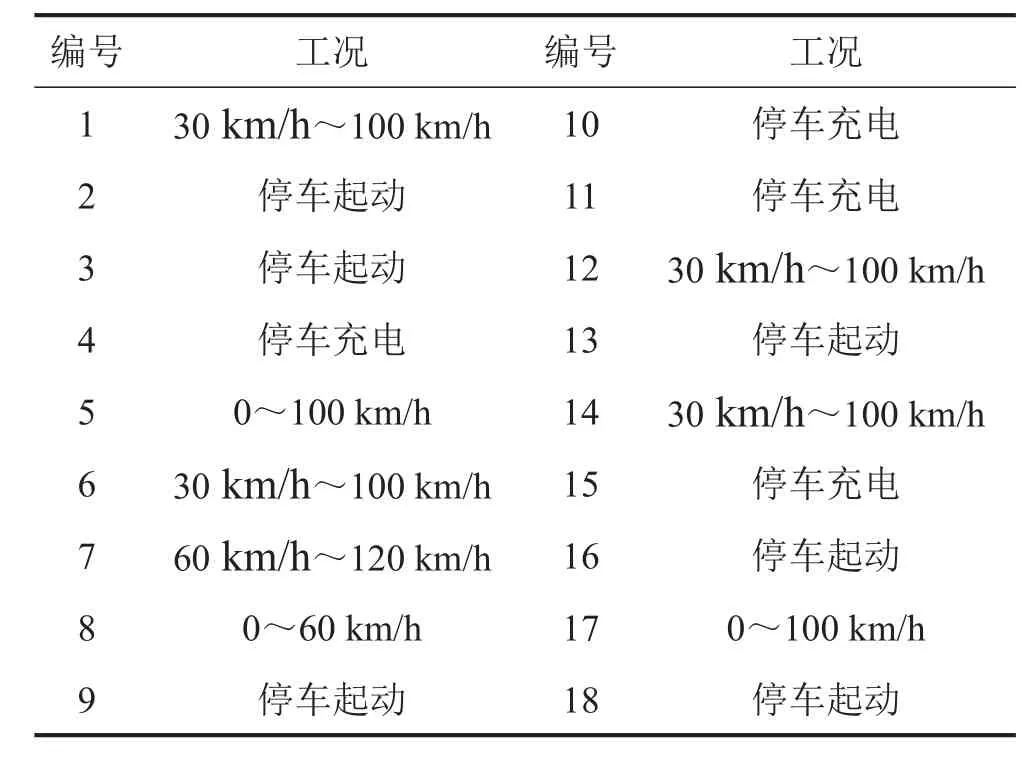
表1 非稳态声样本采集信息
2 非稳态工况客观参量变化
非稳态工况,包括了停车起动、停车充电、起动加速、加速超车等四个工况,其中以0~60 km/h、0~100 km/h、30 km/h~100 km/h、60 km/h~120 km/h模拟起动加速以及加速超车的两个非稳定过程。图1为混合动力车驱动结构示意图。
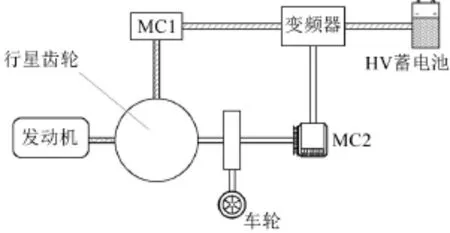
图1 混合动力车驱动结构示意图
2.1 混合驱动模式下客观参量变化
(1)0~60 km/h急加速工况
图2所示为1 s的急加速过程,0.7 s左右处发动机瞬间起动,起动瞬间为非稳态过程,此后为混合驱动模式。
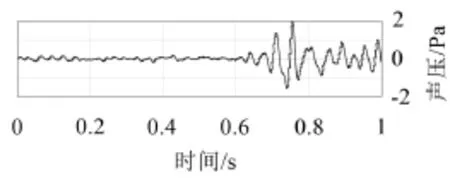
图2 急加速过程
由于是急加速过程,发动机起动瞬间较快,大约为0.1 s,0.7 s之前几乎是瞬态且接近0,加速后变化趋于稳定,故截取0.6 s~0.7 s、0.7 s~0.8 s以及0.8 s~0.9 s三个时间段,发动机起动前后的响度和尖锐度的变化如表2所示。
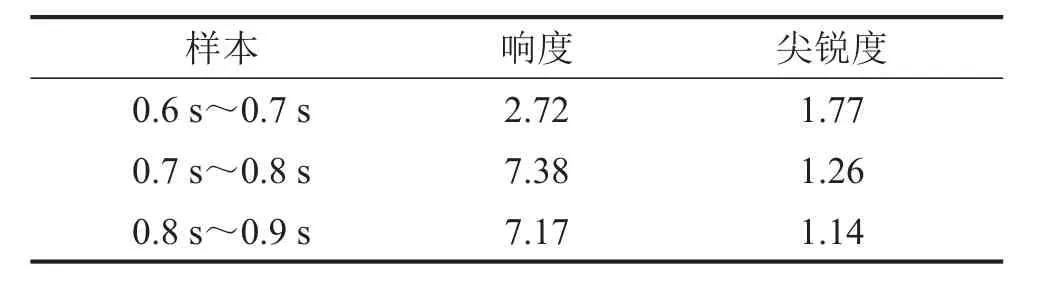
表2 急加速过程响度、尖锐度变化值
发动机起动时尖锐度较启动后阶段反而是最大的,这是由于发动机起动之前是由电机带动的,电机噪声中高频成分较多,因此声音的刺耳程度也相对较高;发动机起动的瞬间响度值大于起动后的,这是因为动力源切换使振动加强,响度值变大;发动机起动后尖锐度就相对降低。
(2)40 km/h稳态—加速超—减速工况
如图3所示,40 km/h纯电动稳态前进之后发动机瞬间起动,与电机MG2共同驱动,电机MG1空转,减速过程中松开油门踏板,发动机没有停机,而进行减速能量回收,MG1,MG2作为发电机,回收减速能量。0.3 s左右发动机瞬间起动,起动瞬间为非稳态过程,此后为混合驱动模式,截取0.1 s~0.3 s、0.3 s~0.5 s以及1.5 s~1.7 s三段。

图3 加速超车-减速过程
表3表示发动机起动前后的响度和尖锐度的变化。汽车以40 km/h稳态行驶时的噪声响度要小于发动机起动的噪声,随着车速的下降,噪声的响度也随着减小;尖锐度在发动机起动瞬间有所增加,减速过程加剧,原因是减速过程中发动机停机,由电机带动行驶。
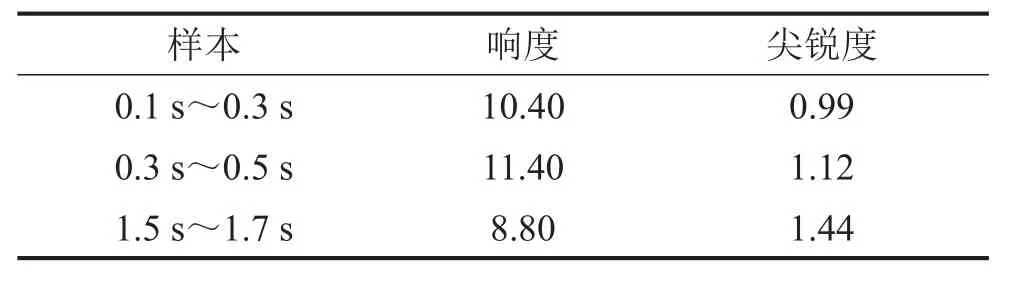
表3 急加速-减速过程响度、尖锐度变化值
2.2 发动机单独驱动客观参量变化
图4所示为停车起动整个过程。停车状态下,开始起动汽车,发动机在电机MG1的带动下迅速起动,电机MG1为起动电机,之后发动机开始喷油点火,带动电机MG1发电,电机MG1转为发电机,给蓄电池充电。
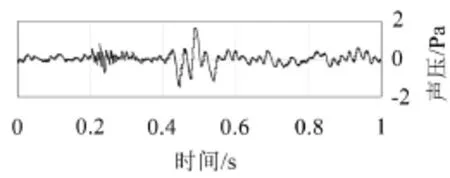
图4 停车起动阶段发动机单独驱动过程
汽车静止不动时,电机MG2不转动,这时电机MG1就成为了起动电机,发动机瞬间起动,此刻为典型的非稳态工况,0.4 s左右电机瞬间起动,起动瞬间为非稳态过程,此刻为发动机单独驱动模式,截取0.2 s~0.4 s、0.4 s~0.6 s以及0.6 s~0.8 s三段,表4给出发动机起动前后的响度和尖锐度的变化。
如表4所示,0.2 s~0.4 s是发动机起动之前状态,电机MG1作为起动电机带动发动机起动,因此高频成分增多,尖锐度较高,响度较小。发动机起动瞬间的响度最高,而尖锐度值较低,原因可能是低频噪声增多,高频成分比例减少。发动机起动后响度值降低而尖锐度值增加。

表4 停车起动阶段发动机单独驱动响度、尖锐度
2.3 电机单独驱动客观参量变化
图5为1 s的停车充电过程,此过程为停车状态下,起动汽车,发动机在电机MG1的带动下迅速启动,此时电机MG1为起动电机,随后发动机开始喷油点火,带动电机MG1发电,电机MG1转为发电机,给蓄电池充电,当检测蓄电池电量充足时,发动机会停机。

图5 停车充电阶段电机单独驱动过程
0.3 s左右电机瞬间起动,此瞬间为非稳态过程,此时为电机单独驱动。截取0.1 s~0.3 s、0.3 s~0.5 s以及0.5 s~0.7 s三段,表5表示电机起动前后的响度和尖锐度的变化。
如表5所示,电机起动之前响度很小,应该是信号的干扰造成的;电机起动瞬间,尖锐度值明显陡增,原因是电机引起的噪声中高频成分较多,同时响度值也有所增加;电机起动后响度值没有明显变化,但是尖锐度值明显回落,这是由于发动机工作带来的高频噪声成分比例减少。

表5 停车充电阶段电机单独驱动过程响度、尖锐度
通过以上试验结果的分析,对于非稳态车内声品质评价可以得出以下结论:
(1)电机单独驱动模式下,由于电机的工作会引起高频噪声成分的增加,从而引起尖锐度的明显变化,尤其是在电机起动瞬间,而响度值较其他工况而言很小,此时尖锐度是影响车内声品质的主要因素,因此更适用于车内声品质的评价;
(2)混合驱动与发动机单独驱动模式下,由于发动机的工作响度明显增大,而尖锐度值无明显变化,甚至会由于发动机工作引起的高频成分比例减少而降低,此时,响度是影响车内声品质的主要因素,因此更适用于车内声品质的评价。
3 解析小波分解与临界频率带
3.1 临界频率带
人类听觉系统能够分辨不同频率的声音,最早由Zwicker提出以特征频率带和Bark尺度来表征人耳的频率选择性[2]。Bark是一个表示频率带宽的单位,特征带宽由式(1)给出

其中fc为中心频率;CBW为特征带宽。
Bark号数与频率的对应关系如表6所示。
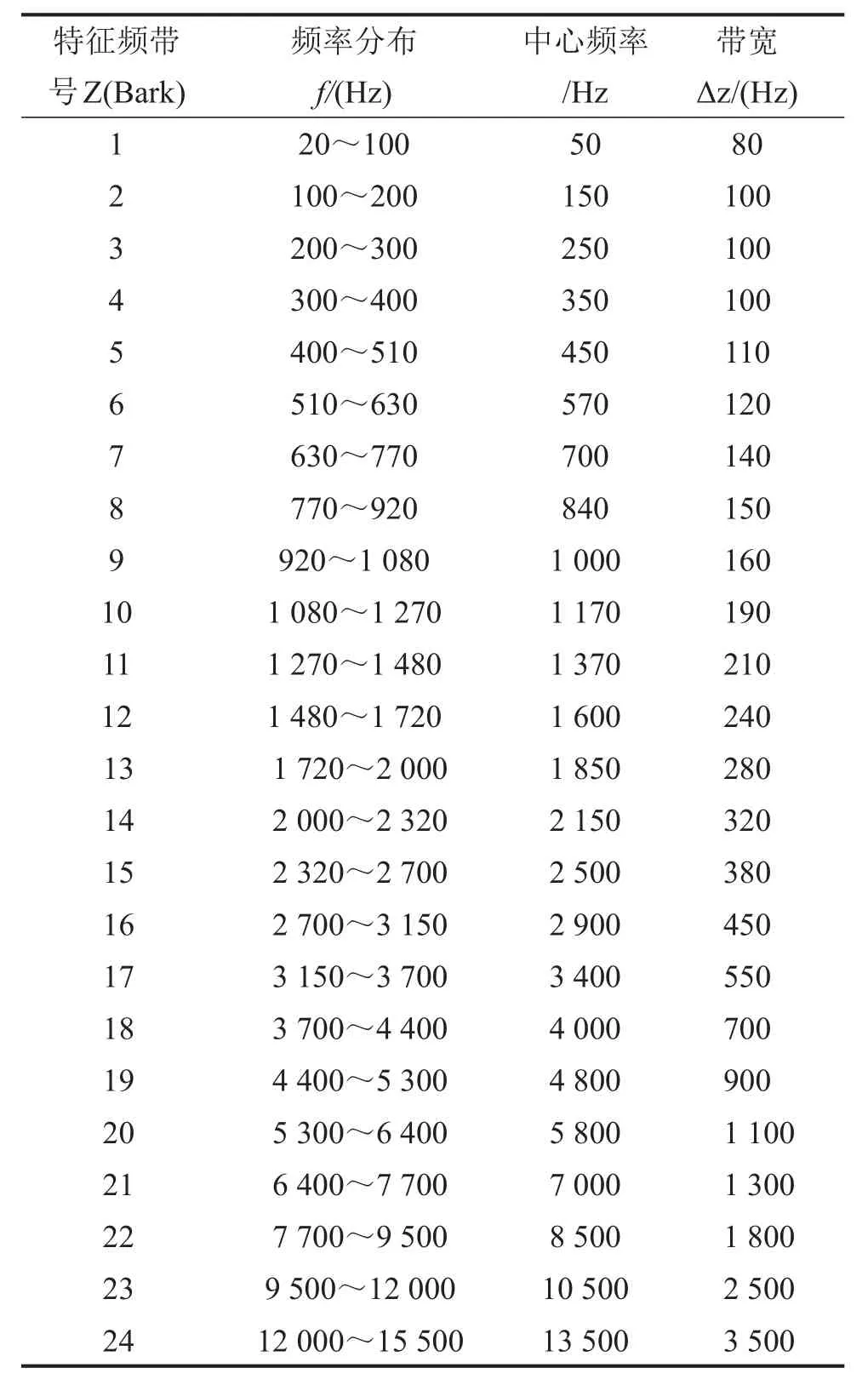
表6 临界频率带
3.2 解析小波分解
解析小波分解拥有较好的时频局部分析能力,但其对时频面是一种机械的分解,所以无自适应性。而神经网络以其较强的自身学习优化能力著称。两者的结合在工程的运用中避免了两者的弱点,强化了网络的寻优和纠错能力[3]。
非平稳的离散性质的瞬态冲击噪声根据Mallat算法[5–7],可以分解为不同频率的频率细节序列,最大分解层数为24。选取合适的小波参数,来生成24个小波。分解层数比较难选取,分解层数过多,就相应需要建立更多的模型对分解后的各个分量进行预测,误差也就会越大;分解层数过少,会导致信号的原始特征不能表征出来,建立的模型就失去意义,根据频率带的划分选取级数为24是合适的。信号x(t)的连续小波变换的表达式为
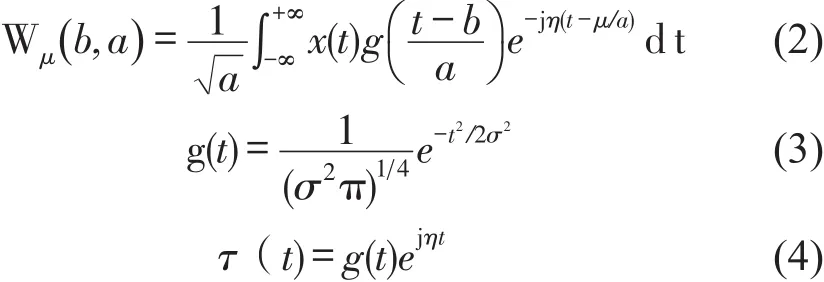
式(3)和式(4)表示的小波称为Morlet小波。
g(t)为一实值函数,选用高斯函数,τ(t)表示母波。

式中ωc为中心角频率;ωl=2πfl为角频率下限;ωμ=2πfμ为角频率上限;ΔdBl为能量差,可表示为

由表6可知,小波的上下限频率的能量均为中心频率处的一半,所以

由上述公式可得
式中的η、σ值可根据需要选取,根据所取的值可计算出小波参数,根据式(2)与表6对声信号进行小波分解,可得Bark特征信号,其结果作为BP神经网络预测模型的输入。
4 非稳态声品质评价
4.1 基于心理声学客观参量的BP神经网络评价模型
将1-12号样本作为训练样本,13-16号样本的响度和尖锐度值作为BP神经网络的输入,输出BP神经网络声品质预测值,训练结果表明,迭代次数为87 380时达到最优表现。图6为训练效果图,表7为预测结果。
从图6和表7的结果可以观察出,基于响度和尖锐度的评价模型预测值误差偏差较大,网络训练的效果也不是很好,稳定性也较差。
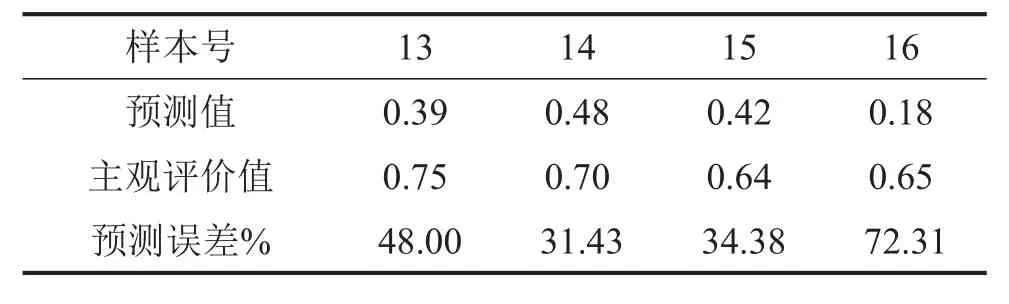
表7 基于心理声学客观参量的BP神经网络声品质预测
4.2 声品质评价模型建立
4.2.1 小波参数
式(9)中ωc、ωl、ωμ已知,所以σ2η2=A(常数),取σ=2,那么根据表6与式(5)可得小波参数,结果如表8所示。
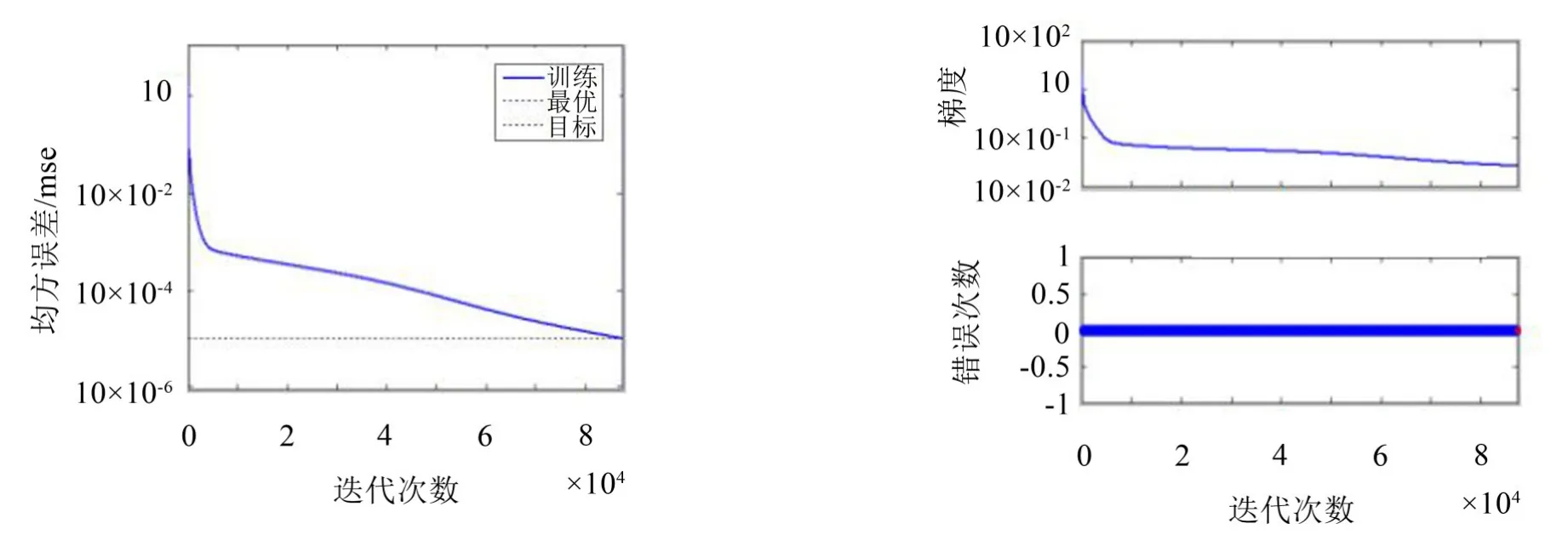
图6 基于心理声学客观参量的BP神经网络训练过程
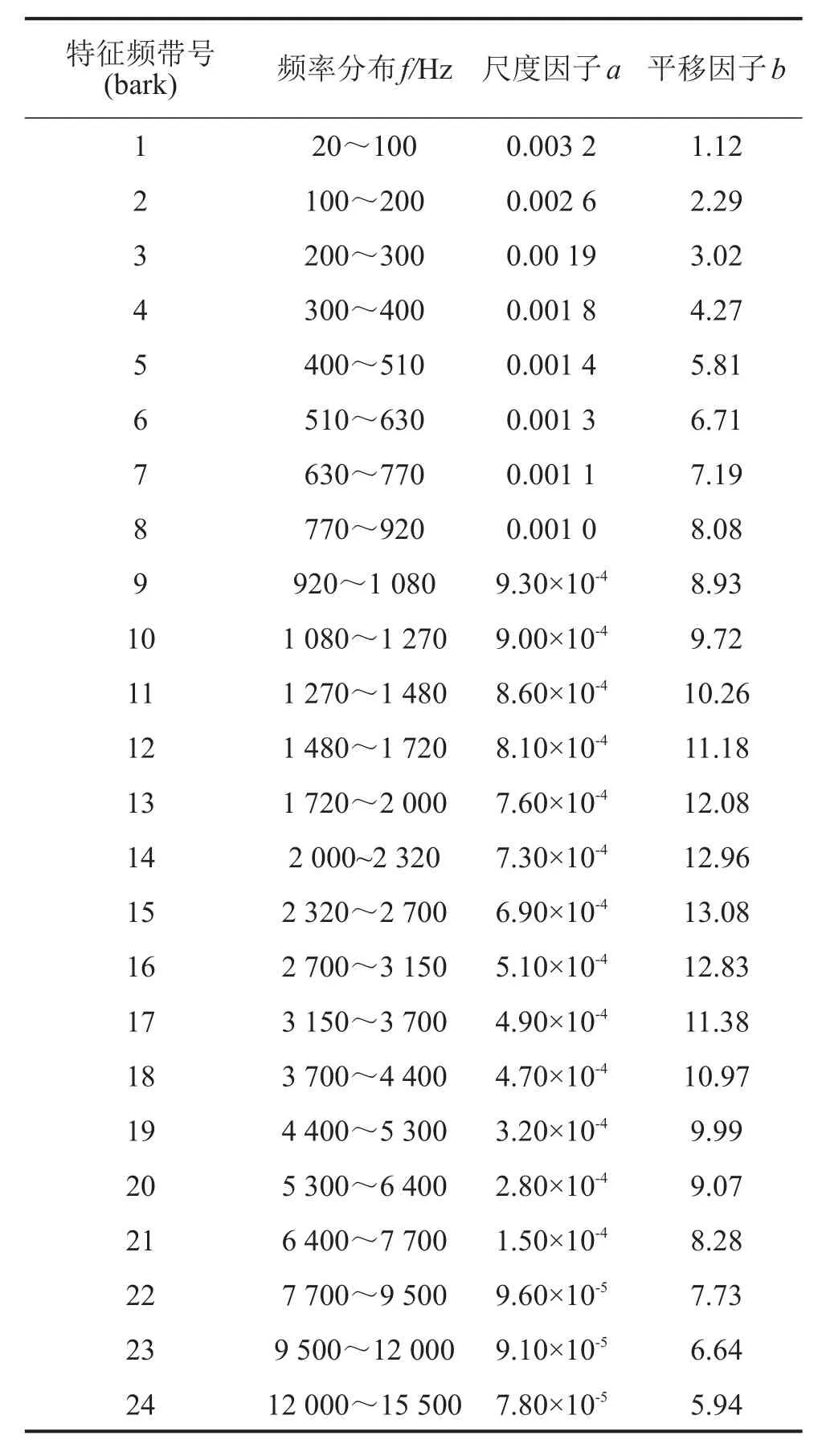
表8 小波参数
4.2.2 声品质评价模型建立流程
基于临界频率带解析小波分解的BP神经网络评价模型是以Bark特征信号作为BP神经网络的输入,基于BP神经网络声品质评价模型,进行声品质的预测,将输出值作为声品质预测模型的预测值,并将其与评价主体的主观评价值作对比,其预测流程如图7所示。

图7 基于临界频率带解析小波分解的BP神经网络声品质预测流程
4.2.3 声品质评价模型建立与预测
将1-12号声样本作为训练样本,训练神经网络的精度,训练结果表明,迭代次数为36 250时达到最优表现。图8为训练效果图,其中13-16号样本的响度和尖锐度值作为BP神经网络的输入,输出BP神经网络声品质预测值,声品质预测结果如表9所示。
基于临界频率带解析小波分解的BP神经网络预测模型的预测效果相对而言比较理想,稳定性较好,误差能控制在20%以下,选取的小波参数与网格模型结合的训练效果也较好。
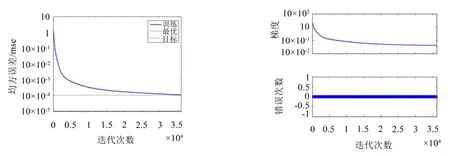
图8 基于临界频率带解析小波分解的BP神经网络训练过程

表9 基于临界频率带解析小波分解的BP神经网络声品质预测
5 结语
(1)电机的工作会引起尖锐度的增加,而发动机的工作会造成响度的明显增加,可以通过发动机和电机工作状态的不同选用合理参量评价非稳态车内声品质。
(2)基于心理声学客观参量的BP神经网络预测模型的预测效果误差较大,网络训练效果和稳定性也较差,因此该方法不适用于车内声品质的预测。而基于临界频率带解析小波分解的BP神经网络预测模型的预测效果相对而言更为理想,选取的小波参数与BP神经网络模型结合的训练效果较好。
[1]张俊智.混合动力电动汽车冲击度的试验[J].机械工程学报,2008(4):87-91.
[2]谢军.汽车声品质评价技术及方法研究[D].长春:吉林大学,2009.
[3]赵丽路,于德介,陈关宝.汽车关门声品质评价参数的建立[J].噪声与振动控制,2013,33(3):132-137.
[4]钟珞,饶文碧,皱承明.人工神经网络及其融合应用技术[M].北京:科学出版社,2007.
[5]JAIDEVA C,GOSWAMI ANDREW K CHAN.小波分析理论、算法及其应用[M].北京:国防工业出版社,2007.
[6]ZHU XIANGDONG,KIM J.Application of analatic wavelet transform to analysis of highly impulsive noises [J].Journal of Sound and Vibration,2006,294(S4-S5): 841-855.
[7]杨川,于德介,徐亚军.基于EMD与BP与神经网络的汽车关门声品质预测[J].汽车工程,2013,35(5):458-466.
[8]陈小平.音乐声学与心理声学[M].北京:人民邮电出版社,2010.
Study on the Evaluation of Interior Sound Quality in Non-steady State of a Hybrid-power Vehicle
HUA Min-xiang,ZUO Yan-yan,WU Sai-sai
(Institute of Noise and Vibration,Jiangsu University,Zhenjiang 212013,Jiangsu China)
In order to evaluate the interior sound quality in the non-steady state of a hybrid-power vehicle,the interior noise samples at different positions under different driving modes and vehicle speeds are collected.The variation of objective parameters in different non-steady states is analyzed.The results indicate that in motor-only driving mode,the sound sharpness can be used to evaluate the interior sound quality under the non-steady state,while in hybrid driving mode and engine-only driving mode,the sound loudness can be used to evaluate the interior sound quality.Furthermore,based on the BP network model,evaluations of the interior sound quality are conducted by using objective acoustic parameters and analytic wavelet decomposition in critical frequency band respectively.It is shown that the latter is better and more stable than the former.
acoustics;sound quality;subjective and objective evaluation model;BP neural network;analytic wavelet decomposition;non-steady state
U467.1+2
A
10.3969/j.issn.1006-1355.2017.02.020
1006-1355(2017)02-0095-06
2016-11-03
国家自然科学基金资助项目(51575238)
华敏相(1992-),女,研究生,研究方向为车辆振动与噪声控制。E-mail:minxiang_hua@163.com
左言言,男,教授,博士生导师。E-mail:yyzuo@mail.ujs.edu.cn
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
听力学及言语疾病杂志(2020年2期)2020-05-20
中华戏曲(2020年1期)2020-02-12
劳动保护(2019年3期)2019-05-16
演艺科技(2017年8期)2017-09-25
客车技术与研究(2014年6期)2014-02-28
汽车工程学报(2013年1期)2013-10-29
