
基于掘进机履带架焊接变形的履带动力学特性分析
2017-04-25 06:50高永新樊昊
噪声与振动控制 2017年2期
高永新,樊昊
(辽宁工程技术大学机械工程学院,辽宁阜新123000)
基于掘进机履带架焊接变形的履带动力学特性分析
高永新,樊昊
(辽宁工程技术大学机械工程学院,辽宁阜新123000)
针对履带架焊接变形对履带行走动力学的影响,应用Ansys有限元方法,模拟履带架的焊接过程,求得履带架的变形量。在此基础上,采用集中质量法建立履带的多自由度动力学模型,根据Bekker理论以履带与地面间的接触力为外部载荷,采用数值分析法求解履带架不同变形量对履带张紧力和振动的影响。仿真结果表明:焊接变形使履带板出现摆角变化,受此影响,履带架的焊接变形对履带行走动力学影响较大,变形越大张紧力越大,在履带板摆角为0.7°时,驱动处的履带张紧力在44 kN至45.6 kN之间变化,波动剧烈。
振动与波;掘进机;履带;多自由度动力学模型;焊接变形
掘进机作为巷道掘进的主要采煤机械设备,在我国的矿业生产中广泛应用,主要用于煤、半煤岩、或岩石巷道的掘进。其行走部承载着掘进机整机的重量,为行走调动以及截割工进提供牵引力[1],是掘进机在恶劣的煤矿巷道中安全、平稳、高效工作的重要保障,故其可靠性至关重要。姚继权对掘进机在平地以及爬坡时的履带张紧力进行研究[2]。苏举栋等对掘进机行进过程中的驱动轮进行了动力学仿真分析[3]。呼格吉乐图等对影响掘进机行走机构的因素进行了分析[4]。赵丽娟等采用联合仿真技术,对掘进机在不同横摆速度下的载荷进行了仿真分析,并以可靠性和疲劳寿命为条件对其横摆速度进行了优化[5]。Mustafa Eyyuboglu E和Kroger G等采用了实验方法,使用传感器装置测量了掘进机在实际工作过程中的振动特性[6–7]。目前国内对履带行走动力学的研究工作大多仅限于其在平整的路面上,却很少考虑到履带架在焊接过程中发生的变形,以及从多自由度出发去研究履带的行走动力学等问题。
文中应用Ansys有限元软件对履带架焊接过程进行模拟,建立在焊接变形影响下履带多自由度动力学模型。采用履带车辆与地面间的交互力学模型。在此基础上,利用Matlab汇编语言对掘进机在行进过程中履带板之间的张紧力进行仿真求解,并且对在不同的履带架焊接变形影响下的履带板之间张紧力进行归纳分析,为掘进机履带行走动力学研究提供一种新的方法。
1 基于Ansys软件的焊接过程分析
1.1 材料热物理性能
为缩减分析时间及减小计算难度,并且不对实际的焊接过程中产生影响,在Proe中建立并简化掘进机履带架的模型,保存为.igs格式,最终调入到Ansys中对履带架进行焊接数值模拟分析。掘进机履带架材料采用Q235,其热物理性能如表1所示[8]。
在模拟过程中,焊缝区域的材料可视为与履带架相同。为了保证计算精度,采用疏密结合的网格划分方法,在焊缝区采用较细的网格,在远离焊缝的区采用较粗的网格,图1为履带架有限元模型。

图1 履带架有限元模型
1.2 热源模型及初始边界条件
由于履带架的壁厚远小于履带架的实际尺寸,在焊接模拟过程中为得到准确的变形分布云图以及主要考虑热源在履带架表面的分布,因此采用与二维高斯热源模型近似的描述热流的分布[9],焊接电流为130 A,焊接电压为24 V,焊接速度为4 mm/s,焊接热效率为80%,焊接温度为1 500℃,电弧有效加热半径为8 mm。在实际焊接过程中,由于履带架的表面温度高于环境温度,所以存在与周围空气的对流换热

式中h为表面传热系数;Tw为工件温度;Tf为环境温度。自然空气对流h取值范围为5~25,这里取h=23,环境温度Tf=27℃。
1.3 焊接变形结果分析
在Ansys中,采用间接耦合解法进行焊接变形分析。即将焊接热分析得到的节点温度作为“体力”载荷施加在后序的焊接变形分析中来实现耦合。在模拟焊接过程中采用生死单元技术模拟焊缝区域材料的逐步填充过程。为了避免焊接时产生刚体位移,对立板进行全约束。
对焊接后的履带架进行变形分析,其分布云图如图2所示。
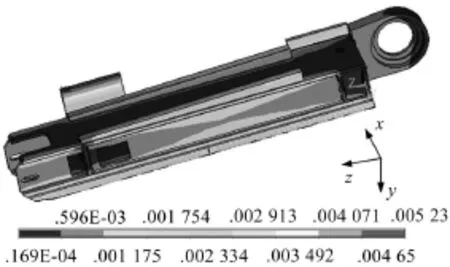
图2 履带架焊接变形云图
由图中可知,对于履带架整体来看,主要的变形发生在履带架的侧面,上表面的变形较小,最大的变形在侧面的中间位置。远离中间位置变形逐渐减小。
2 动力学分析
2.1 履带与地面间行驶阻力建模
依据煤矿巷道路面的实际情况,可将其土壤视为具有“记忆”功能的软性地面,即考虑加载历史[10],每个履带板与地面间都有一广义力。履带车辆与地面间的交互力学模型是基于美国学者MG贝克的压力—沉陷关系[11],即
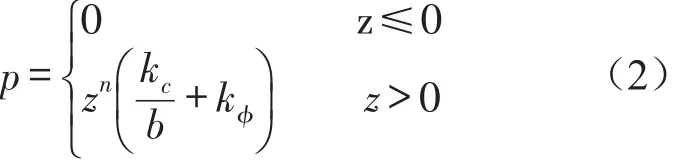
式中p为接地压力;kc、kϕ、n的物理参数;b为履带板的宽度;z为土壤的变形深度。当履带板与地面接触并陷入地面轮廓线以下时,z为正值;当履带板位于地面轮廓线以上时,z为负值。
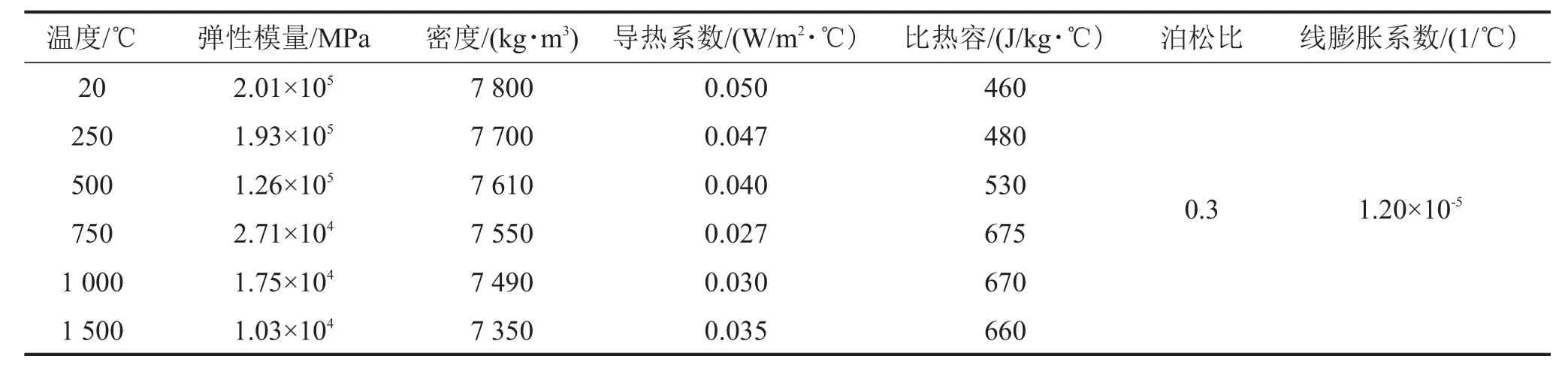
表1 Q235钢各温度段力学性能指标
掘进机行驶阻力是由履带挤压巷道土壤而产生的变形阻力的水平分量[12–13],假设巷道路面在各方向特性相同。在掘进机行走部系统中,驱动轮后置,导向轮前置。因此,以导向轮中心在车辆沉陷前后位置的位移差表示巷道路面的压陷深度。由力学换算关系,可以将掘进机的形式阻力加载于掘进机的质心处[14]。即
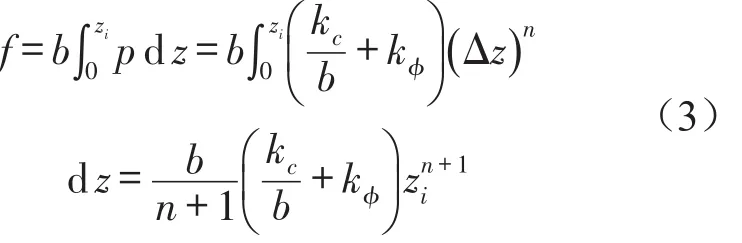
式中f为第i块履带板与地面间的阻力;zi为第i块履带板的压陷深度。
选用的巷道路面土壤的物理参数如表2所示[15]。
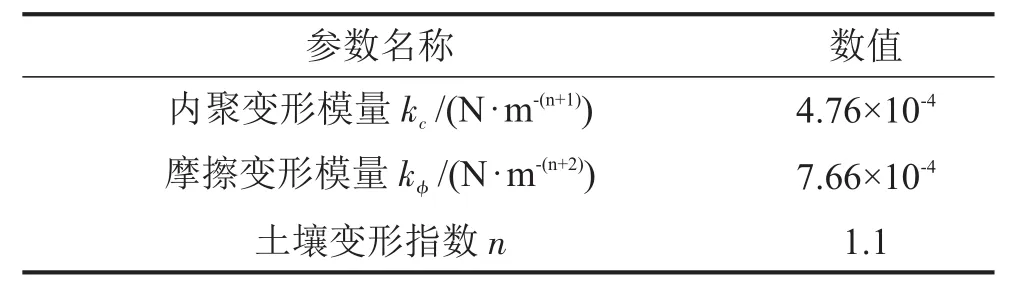
表2 路面特征参数
在Matlab软件中得到车速与行驶阻力的仿真曲线,整车启动并加速,最终达到1.3 m/min,并且每个履带板的行驶阻力在27.43 kN上下波动,最大值为30.17 kN,见图3。
2.2 建立履带架动力学模型
由上述分析,履带架在整体焊接过程中,焊接变形主要发生在YOZ平面。由此采用集中质量的方法,建立在路面激励下XOZ平面内履带多自由度的动力学模型,如图4所示。
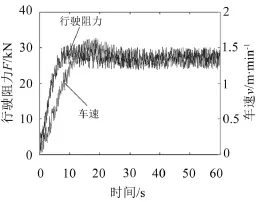
图3 履带板行驶阻力与车速的仿真曲线
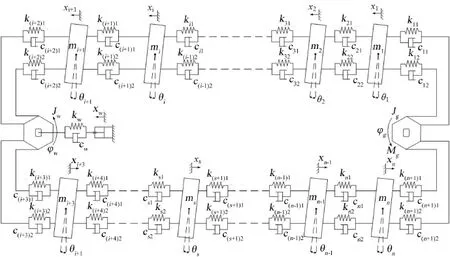
图4 多自由度履带系统动力学模型
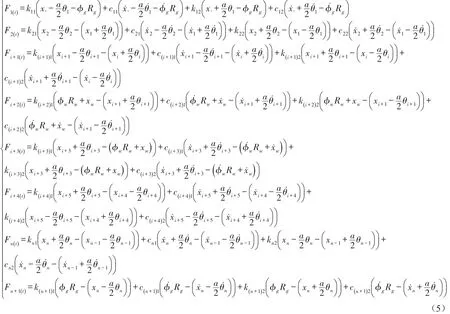
式(4)中,m为履带板的质量;a为单个履带板的长度;W为履带板运行阻力;Jw、Jg分别为导向轮与驱动轮的转动惯量;θ为履带板摆角;ϕw、ϕg分别为导向轮与驱动轮的转角;x为履带板移动的位移;xw为张紧油缸的位移;Rw、Rg分别为导向轮与驱动轮的半径;k、c分别为履带板之间的刚度系数和阻尼系数;kw、cw分别为张紧油缸与导向轮之间的刚度系数和阻尼系数;M0为掘进机整机的质量;Mg为驱动轮处驱动装置的转矩。
3 仿真分析
焊接对履带架侧面变形影响较大,并且集中于中间位置,因而使履带架驱动轮和张紧轮链接处的履带板摆角最大。将上下层履带分别简化为4个集中质量,并假设其对称分布。应用Matlab汇编语言对掘进机行走时履带系统进行仿真求解。结合EBJ-160掘进机恶劣的煤矿巷道工作条件,相关参数为[16–17]:M0=105 400 kg;R=350 mm;μ=0.3;a= 600 mm;m=15 kg;W=1 t;k=2.78×108N/m;c= 1.43×103N∙s/m;θ1=0.7°;θ2=0.3°;θ3=-0.3°;θ4=-0.7°;θ5=-0.7°;θ6=-0.3°;θ7=0.3°;θ8= 0.7°。EBZ-160掘进机驱动装置的液压马达型号为CA50-32[18],掘进机在平稳工作过程中其驱动转矩为1 235.21 N∙m。
图5为掘进机履带张紧力的仿真结果,从中可以看出,掘进机在前进过程中,履带下部即位置6至位置11的履带板,由于同时受到来自地面的激励和履带与履带架之间的摩擦激励,履带下部受到的张紧力大于履带上部即位置1至位置5的履带板。
由于位置11的履带板最接近履带架的驱动轮,因此同时还受到来自掘进机驱动装置的驱动激励,故其受到的张紧力与其他位置的履带板受到的张紧力相比,张紧力较大,波动剧烈。
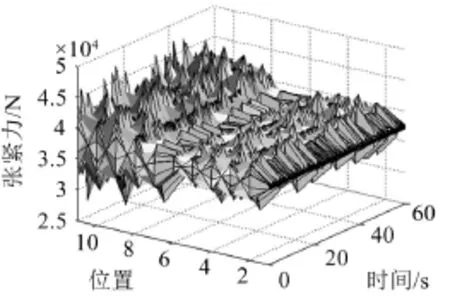
图5 履带板间的张紧力
结合掘进机在恶劣的煤矿巷道工作时,履带架驱动处的焊缝容易发生断裂。由于焊接方式、焊接环境、焊接顺序等因素的影响,履带架驱动处会发生不同程度的变形。基于以上分析,通过Matlab软件对驱动处的履带板即位置11的履带板在焊接后的履带架造成的不同摆角条件下的张紧力进行仿真分析,图6所示分别为理想状态即履带架焊接不发生变形、θ=0时,以及履带架发生焊接变形条件下θ= 0.3°、θ=0.7°时,履带板与驱动处之间的张紧力。从图6可以看到,在焊接的理想状态下,掘进机驱动处的履带受到的张紧力的大致范围为3.22×104N~3.44×104N,并且张紧力的波动较平缓。在履带架焊接变型的影响下,由于履带架的变型,使履带板之间的连接装置处于拉伸状态,并且履带板与地面之间发生不完全的接触状态,当θ=0.3°时,驱动处履带张紧力的大致范围为3.64×104N~3.78×104N;当θ= 0.7°时,驱动处履带张紧力的大致范围为4.40×104N~4.56×104N,并且张紧力的波动越来越剧烈。图7为图6(a)中在20 s至30 s之间的履带架的张紧力变化曲线。
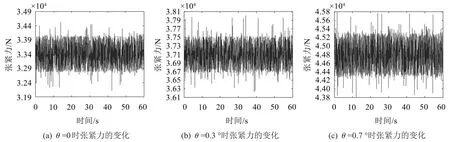
图6 履带板在不同摆角下与驱动处之间的张紧力
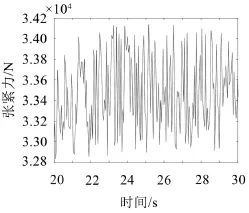
图7 履带板张紧力变化曲线
4 结语
(1)通过Ansys热力学有限元分析,得出掘进机履带架在焊接影响下会发生变形。从整体看,履带架侧面的变形较大,主要集中在中间位置。
(2)通过采集中质量法建立履带多自由度动力学模型以及履带车辆与地面间的交互力学模型,采用Matlab汇编语言分析,得到下层履带的张紧力较大,振动剧烈。驱动处与其下方的履带板之间的张紧力最大。
(3)通过对履带架不同的焊接变形条件下以及理想状态下驱动处与其下方履带板张紧力的仿真分析,得到焊接变形对其张紧力影响较大,并且焊接变形越大其张紧力越大的结论。当θ=0.3°时,驱动处履带张紧力的大致范围为3.64×104N~3.78×104N;当θ=0.7°时,驱动处履带张紧力的大致范围为4.40×104N~4.56×104N,并且张紧力的波动越来越剧烈。
(4)在掘进机履带架实际生产焊接过程中,应结合现场实际的焊接环境以及焊接条件,采取相应的焊接工艺以及焊接方法,并采用合理的焊缝焊接顺序,从而控制、减小掘进机履带架的焊接变型,进而减小掘进机在行驶过程中履带架焊接变型对履带张紧力的影响。
[1]陈效栋,朱阳阳,李晓涛.EBZ 315悬臂式掘进机履带行走失效分析[J].煤矿机械,2014,35(11):210-211.
[2]姚继权.纵轴式掘进机履带行走系统动力学研究[D].阜新:辽宁工程技术大学,2012.
[3]苏举栋,王义亮,杨兆建.掘进机行走部驱动轮动力学仿真分析[J].煤矿机械,2013,34(9):80-82.
[4]呼格吉乐图,尹明,张高平.履带式掘进机行走机构的动力学计算分析[J].煤矿机械,2011,32(9):21-23.
[5]赵丽娟,刘旭南,曹拓.纵轴式掘进机横摆运动参数的优化设计[J].煤炭学报,2012,37(12):2112-2117.
[6]MUSTAFA EYYUBOGLUE,NACIBOLUKBASI. Effects of circumferential pick spacing on boom type roadheader cutting head performance[J].Tun-nelling and Underground Space Technology,2005,20(5):418-425.
[7]KROGER G,BRZCHTA P.Neue meund diagnosesysteme für fürderer und fobelanlagen[J].Glückauf,1991,127(17/ 18):778-785.
[8]徐利霞.焊接残余应力场在交变载荷作用下的特性研究[D].大连:大连理工大学,2006.
[9]肖冯,米彩盈.T型角接头焊接热源模型研究[J].电焊机,2010,40(6):41-44.
[10]王军,魏来生,兰小平.驾驶员-履带车辆-路面系统的建模和仿真[J].计算机集成制造系统(CIMS),2003,(9):108-111.
[11]BEKKER M G.地面-车辆系统导论[M].北京:机械工业出版社,1978.
[12]韩雪海,刘侃,周玉珑.履带车辆行驶力学[M].北京:国防工业出版社,1989:50-53.
[13]唐经世.工程机械底盘学[M].成都:西南交通大学出版社,1999:303-307.
[14]宿月文,朱爱斌,陈渭,等.履带机械地面力学建模及牵引性能仿真与试验[J].西安交通大学学报,2009,43(9):42-45+50.
[15]WONG J Y.Theory of ground vehicles[M].3ed.Toronto, Canada:John Wiley and Sons Inc,2001.
[16]毛君,许文馨.掘进机坡角工况下转向动力学特性仿真[J].辽宁工程技术大学学报((自然科学版)),2015,34 (11):1303-1307.
[17]李晓豁,何洋,李婷,等.纵轴式掘进机横向和纵向随机振动响应的分析[J].煤炭学报,2014,39(3):580-585.
[18]郑立勇,宋庆民.EBZ-160型掘进机装载驱动装置技术改造及应用[J].煤炭工程,2013:152-154.
Analysis of Dynamic Characteristics of Tracks Based on Welding Deformation of Roadheader Crawler Frames
GAO Yong-xin,FANHao
(School of Mechanical Engineering,Liaoning Technical University,Fuxin 123000,Liaoning China)
The influence of welding deformation of the roadheader crawler frame on the travel dynamics of tracks is studied.The welding process of the crawler frame is simulated by means of the Ansys finite element software and the deformation of crawler frame is obtained.On this basis,the multi-DOF dynamic model of the track is established by Lumped Mass Method.According to Bekker theory,the contact force between the track and the ground is regarded as external load.The influence of the different deformations of the crawler frame on the tensile force and vibration of the track is analyzed numerically.The simulation results show that the welding deformation of the track frame can make the track plate to have a swing angle change,which has a great influence on the travel dynamics of the track.Large deformation of the track frame can lead to a large tensile force.When the swing angle reaches 0.7°,the drive-induced tensile force of the creepers of the track is within 44 kN-45.6 kN,which induces violent vibration.
vibration and wave;roadheader;track;multi-DOF dynamic model;welding deformation
TH113.1
A
10.3969/j.issn.1006-1355.2017.02.006
1006-1355(2017)02-0028-05+66
2016-10-14
高永新(1973-),男,辽宁省阜新市人,副教授,博士,硕士生导师,主要研究方向为矿山机械电子。
樊昊,男,甘肃省静宁县人,硕士研究生,研究方向为机电一体化。E-mail:461998521@qq.com
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
兵器装备工程学报(2021年3期)2021-04-09
隧道建设(中英文)(2021年11期)2021-01-16
中国新技术新产品(2020年4期)2020-05-05
凿岩机械气动工具(2017年2期)2017-07-19
科技创新导报(2016年27期)2017-03-14
凿岩机械气动工具(2015年3期)2015-11-11
凿岩机械气动工具(2015年3期)2015-11-11
科技视界(2014年6期)2014-12-24
