基于MOEMS的微型数字太阳敏感器*
2017-04-21 06:53:39郑伦贵王建中中北大学仪器科学与动态测试教育部重点实验室太原0005清华大学精密测试技术及仪器国家重点实验室北京00084中国航天科工集团第三研究院第三四研究所北京00074
传感技术学报 2017年4期
李 杰,郑伦贵,2*,陈 星,王建中(.中北大学仪器科学与动态测试教育部重点实验室,太原 0005;2.清华大学精密测试技术及仪器国家重点实验室,北京 00084;.中国航天科工集团第三研究院第三○四研究所,北京 00074)
基于MOEMS的微型数字太阳敏感器*
李 杰1,郑伦贵1,2*,陈 星3,王建中1
(1.中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.清华大学精密测试技术及仪器国家重点实验室,北京 100084;3.中国航天科工集团第三研究院第三○四研究所,北京 100074)
结合CMOS APS图像传感器与MEMS工艺的优势,研制了一种适用于微纳卫星的两轴数字太阳敏感器,在保证测量精度的同时,减小了系统的体积与功耗。其光学系统由CMOS APS图像传感器和MEMS工艺制作的孔阵列结构光学引入器组成,提高了敏感器的分辨率,扩大了有效视场的范围。利用太阳模拟器对数字太阳敏感器进行了测试标定,结果表明,在120°圆锥全视场范围以内,1σ精度优于0.035°。
数字太阳敏感器;CMOS APS图像传感器;光线引入器
微纳卫星因其成本低、研制周期短、发射灵活等优点,广泛应用于在轨试验、遥测通信、深空探测等应用领域。基于CCD(Charge Coupled Device)及CMOS(Comp-lementary Metal Oxide Semiconductor)APS(Active Pixel)图像传感器的微型数字太阳敏感器是微小卫星姿态确定与控制系统ADCS(Attitude Determination and Control System)常用的一种姿态敏感器,能够为卫星提供所需要的太阳矢量信息[1]。
随着微纳卫星的发展及小型化研究的深入,对太阳敏感器的质量、功耗及精度等提出了更高的要求[2],文献[3]研制了一种适用于微型航天器的两轴数字式太阳敏感器,质量小于300 g,在±64°视场以内精度优于0.1°,±10°视场以内精度优于0.02°,但2.5 W的功耗偏高,2 Hz的更新率偏低;文献[1]设计的基于全景鱼眼镜头的数字太阳敏感器视场为180°×360°,功耗150 mW,但3δ精度0.18°不能满足高精度姿态信息输出的需求。
针对以上存在的不足与缺陷,结合微纳卫星设计中“结构模块化”、“接口规范化”等发展特点,本文提出了一种基于微光电子机械系统MOEMS(Micro Opto Electro Mechanical System)的两轴数字太阳敏感器,圆锥视场可达120°,具有更小的体积、功耗及更高的精度。
1 光学系统设计
微型数字太阳敏感器光学系统由CMOS APS图像传感器和MEMS工艺制作的孔阵列结构光学引入器组成。同CCD相比,CMOSAPS图像传感器在小型化、低功耗等方面具有更为突出的优势,CMOS APS感光探测器与MEMS技术相结合,应用于新一代太阳敏感器的研制,逐步具备与常规CCD感光探测系统相当的性能。基于MOEMS的两轴数字太阳敏感器光学系统设计如图1所示。

图1 光学系统设计
微型太阳敏感器采用单板式结构,光线引入器设计为阵列多孔形式。在玻璃基底上度Cr膜进行光线衰减,然后采用刻蚀图案的硅作为光阑[4]。通过硅玻璃键合技术将光线引入器与CMOS APS图像传感元件集成起来,从而减小系统体积,进一步降低光路折射误差,以期实现低成本、低功耗、高集成度的单芯片成像系统。
为保证120°圆锥有效视场,避免视场过渡时候出现盲区,考虑小孔衍射图像的质量,经过计算与仿真,确定光线引入器掩膜层到光探测面的距离h=150 μm,小孔尺寸为30 μm×30 μm,小空组间距为200 μm,小孔阵列9×9。图2表示入射角为45°时,小孔衍射MATLAB仿真结果。
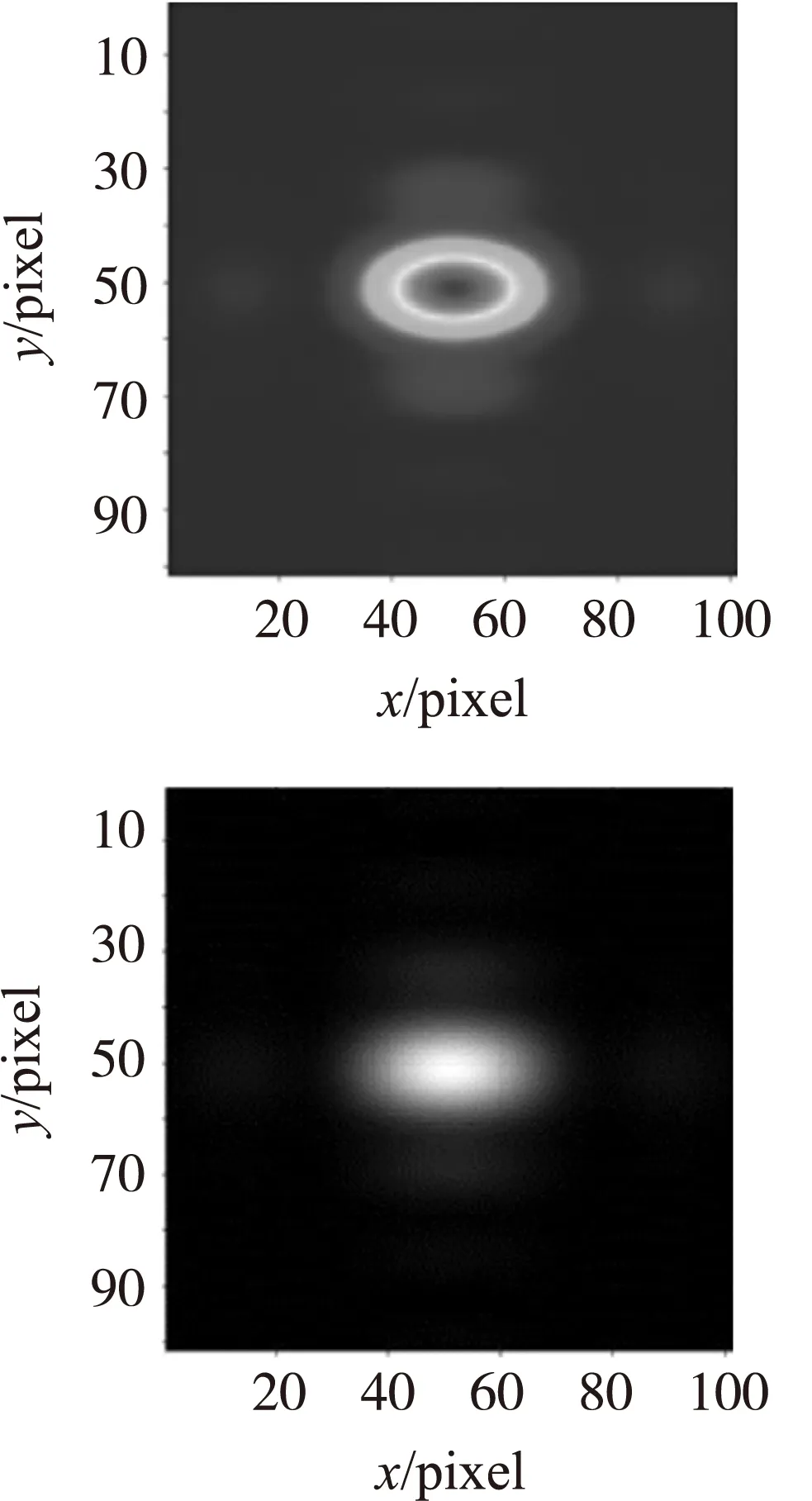
图2 小孔衍射仿真图
2 图像处理与算法
2.1 信息处理单元
基于FPGA的太阳敏感器信号处理单元如图3所示。FPGA通过拍照控制信号设置太阳敏感器的工作模式,由CMOS APS图像传感器获取的感光图像信息经DS90CR255 CameraLink接口芯片转换为低电压差分信号,再通过DS90CR256芯片将信号转换成并行信号进入FPGA输入端口并缓存。FPGA里的“太阳光线”解算模块进行太阳光斑识别和质心提取,并求出最终的太阳光线入射角。
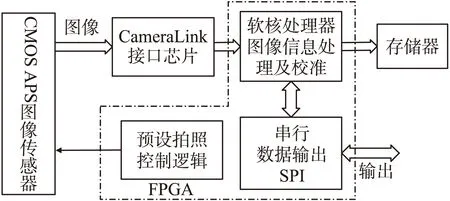
图3 信息处理单元
2.2 质心及太阳入射角算法
COMS APS图像传感器感光的一帧图像分辨率为1 024×1 280,有效扫描图像区域设置为边界为起点像素坐标(40,40),终点像素坐标(983,1 059)的矩形区域。读取一帧CMOS APS图像传感器图像信息,进行初始化及参数设置,按预设程序对有效图像区域进行扫描,找出灰度值大于预设阈值的有效像素点所形成的光斑,并计算光斑质心及两轴太阳入射角。为避免视场过渡出现盲区,光线引入器三个小孔为一组,即一般情况下COMS APS光探测面可见三个光斑,工程应用中捕获一个光斑即为成功。算法工作流程如图4所示。

图4 图像处理算法流程图
图5表示平行太阳光线穿过小孔在光探测面的投影,采用过阈值质心算法的二维太阳角矢量信息解算过程如下[1-3,5-8]:①太阳入射角为0°,计算太阳光斑质心原点坐标(xo,yo);②读取有效图像区域,采用过阈值质心算法计算质心坐标(xc,yc)
(1)
式中:(x,y)为光斑像素点坐标,f(x,y)为像素点(x,y)的灰度值。
③计算两轴太阳角(α,β)
(2)
式中:h为光线引入器掩膜层到光探测面的距离。
④计算太阳入射角γ
(3)

图5 数字太阳敏感器原理
图6 微型数字太阳敏感器工程样机
3 测试分析
在文献[2-3]的工作基础上,采用性能更为出色的CMOSAPS图像传感器,基于MOEMS技术研制的高精度微型数字太阳敏感器工程样机如图6所示。外形尺寸80mm×68mm×34mm,质量182g,功耗小于1W,更新率优于10Hz。
3.1 转台实验
为验证微型数字太阳敏感器设计的合理及是否达到指标要求,常温常压室内条件下,设计了转台实验,主要测试用设备及性能如表1所示。
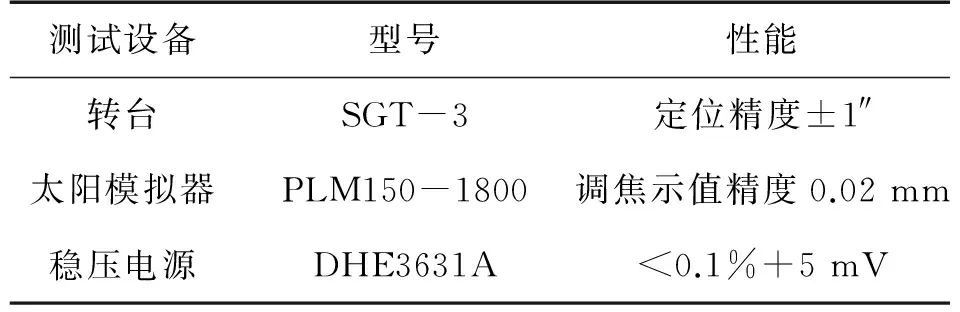
表1 测试设备及性能
转台实验设计如下[9]:①如图7所示,用专用试验夹具将数字太阳敏感器固定安装在SGT-3型转台的内框架上,并调整与PLM150-1800型太阳模拟器保持精密对准。②微型太阳敏感器上电,打开太阳模拟器,调整转台使α=0°,β=0°,以5°为步长,依次测试并记录不同角度下数字太阳敏感器的输出,并与预设值作比较统计误差。
3.2 误差分析
受内外部因素干扰影响,微型数字太阳敏感器输出包含多种误差项,其中主要包含成像系统噪声、不一致性和数字量化误差,数学模型及质心算法所引入的估计误差,测试设备自带误差及非对准安装误差等[10-11]。全视场下太阳敏感器的误差结果如图8所示。
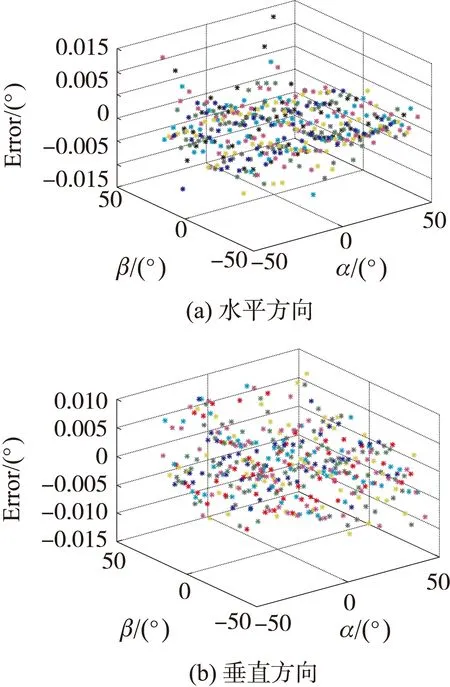
图8 全视场系统误差
表2列出了几种典型角度位置下太阳敏感器输出误差的标准差,结果表明,120°圆锥全视场范围内,研制的微型数字太阳敏感器工程样机1σ精度优于0.035°,在半视场或更小视场下,精度可达0.01°。从误差源角度入手分析,输出误差大多由质心算法估计误差及非严格测试过程所导致。采用多张图片信息加权求均值的途径,或使用经纬仪等精密仪器辅助测试可减小太阳敏感器的输出误差。
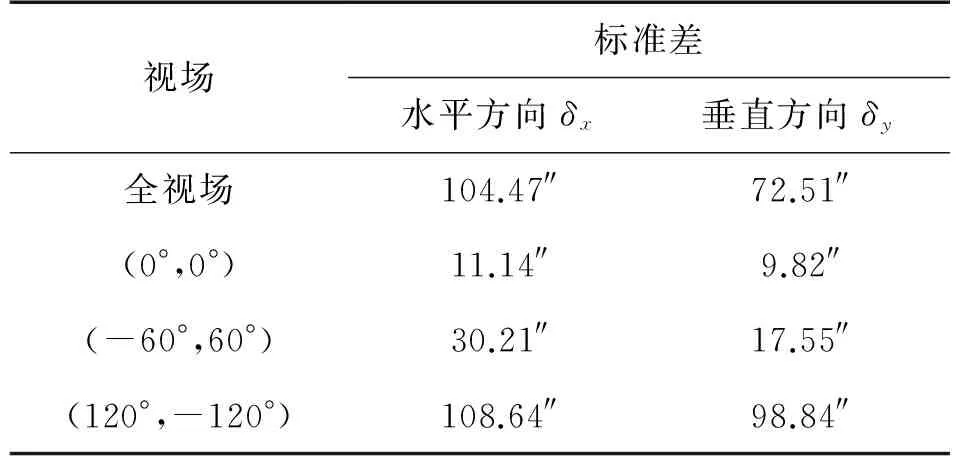
表2 测试结果
4 结论
基于CMOS APS图像传感器和MEMS技术的微型数字太阳敏感器满足微纳卫星对体积和功耗的要求,120°圆锥全视场下,1σ精度优于0.035°,更新率优于10 Hz,可为微纳卫星ADCS系统提供高精度的姿态信息。
[1] 白光耀,王昊,王志远,等. 面向微小卫星的全视场数字太阳敏感器设计[J]. 传感技术学报,2016,29(2):232-236.
[2] 丁天怀,郑志敏. 微型数字式太阳敏感器的原理实验[J]. 清华大学学报(自然科学版),2005,45(2):186-189.
[3] 丁天怀,毕研刚,王鹏. 基于CMOS APS的微型数字式太阳敏感器[J]. 清华大学学报(自然科学版),2008,48(2):203-206.
[4] 邢飞,尤政,张高飞. 基于MEMS光线引入器的太阳敏感器技术[J]. 功能材料与器件学报,2008,14(1):246-250.
[5] 贾传良. 数字式太阳敏感器研究[D]. 哈尔滨:哈尔滨工业大学,2007.
[6] 赵晨. 太阳敏感器阈值质心算法的设计与验证[D]. 哈尔滨:哈尔滨工业大学,2012.
[7] 李辉. 基于CMOS相机的微卫星数字式太阳敏感器研究[D]. 浙江大学,2010.
[8] Rufino G,Grassi M. Multi-Aperture CMOS Sun Sensor for Microsatellite Attitude Determination[J]. Sensors,2009,9(6):4503-4524.
[9] Maji A,Prabhamani H R,John V,et al. Design and Development of Two Axes Micro Digital Sun Sensor Using Linear CMOS Detector[C]//Physics and Technology of Sensors,2015:187-191.
[10] Antonello A,Olivieri L,Francesconi A. Low-Cost,High-Resolution,Self-Powered,Miniaturized Sun Sensor Gor Space Applications[J]. Journal of Measurements in Engineering, 2016, 4(3): 148-155.
[11] Wei M,Xing F,You Z. A Highly Accurate Wireless Digital Sun Sensor Based on Profile Detecting and Detector Multiplexing Technologies[J]. Mechanical Systems and Signal Processing,2016,82:56-67.

李 杰(1987-),男,河北人,博士研究生,测试计量技术与仪器专业,主要研究方向为惯性系统及测试,组合导航算法研究,583598264@qq.com;

郑伦贵(1980-),男,四川人,讲师,仪器科学与技术专业,主要研究方向为卫星姿态确定及控制,捷联惯导和组合导航系统研究。
Micro-Digital Sun Sensor Based on MOEMS*
LI Jie1,ZHENG Lungui1,2*,CHEN Xing3,WANG Jianzhong1
(1.Educational Key Laboratory for Instrument Science and Dynamic Measurement,North University of China,Taiyuan 030051,China;2.Department of Precision Instruments,Tsinghua University,Beijing 10008,China;3.304 Institute of China Aerospace Science and Industry Corp,Beijing 100074,China)
Combining the advantage of CMOS APS image sensor and MEMS technology,a kind of digital solar sensorused in micro-nano satellites is developed. The measurement accuracy is satisfied,meanwhile the volume and power consumption of the system is reduced. The optical systemconsists of CMOS APS image sensor and a MEMS based optical introducer with a hole array structure,which improves the resolution of the sensor and enlarges the effective field of view. The calibration of the gigital sun sensor is done using a solar simulator,the test results show that the accuracy(1σ)is better than 0.035° in a full field of coneview of 120°.
gigital sun sensor;CMOS APS image sensor;optical introduce
项目来源:清华大学精密测试技术及仪器国家重点实验室开放基金项目(16106000005)
2016-11-13 修改日期:2016-12-27
TN914.42
A
1004-1699(2017)04-0519-04
C:7230
10.3969/j.issn.1004-1699.2017.04.006
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
汽车实用技术(2022年14期)2022-07-30 06:24:26
中国光学(2021年6期)2021-11-25 07:48:32
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
中外文摘(2019年8期)2019-04-30 06:47:36
中国医疗设备(2019年1期)2019-01-15 12:10:54
创新作文(小学版)(2016年28期)2016-02-28 18:24:50
故事作文·高年级(2015年5期)2015-09-08 08:27:33
激光与红外(2015年10期)2015-03-23 06:07:18
航天器工程(2014年5期)2014-03-11 16:35:53