特长隧道环境下驾驶人注视转移特性研究*
2017-04-16 01:34:25胡月琦李金檑刘浩学
中国安全生产科学技术 2017年8期
胡月琦,朱 彤,2,李金檑,刘浩学,2
(1.长安大学 汽车学院,陕西 西安 710064;2.长安大学汽车运输安全保障技术交通行业重点实验室,陕西 西安 710064)
0 引言
隧道空间结构封闭、内外光环境差异明显,与一般道路相比,它在通风、照明、视距等方面受到较大的限制,给道路使用者在心理和生理上带来较大负担[1],这影响了驾驶员对环境信息的感知,不利于驾驶人提取目标信息。驾驶人在驾驶过程中主要是通过注视行为来识别交通环境中的目标信息[2],而提取信息是驾驶行动中最重要的心理过程,提取的信息不足或遗漏必要的情报,都可能导致事故发生[3]。因此,研究特长隧道环境下驾驶人的注视转移特性,对提高驾驶人环境感知全面性与准确性,从而从驾驶人角度提高隧道交通安全水平具有现实意义。此外,研究表明驾驶人的熟练程度在一定程度上决定了驾驶行为的安全性[4],研究驾驶经验对驾驶人注视转移模式的影响规律,对优化驾驶人视觉搜索模式,提高驾驶人信息提取效率,从而提高行车安全性具有重要意义。
近年来,国内外学者对驾驶人注视转移模式和视觉搜索策略做了一系列的研究。Burling等对比了不同经验驾驶员在识别潜在危险时的眼动模式[5];Underwood等[6-8]通过实验,分析熟练驾驶员与非熟练驾驶员的水平方向搜索广度的差异;Falkmer[9]等分析了熟练与非熟练驾驶人视觉搜索的规律;袁伟等人在城市道路环境中进行了实车实验,收集驾驶员眼动数据,分析驾驶员在城市交通环境下的视觉搜索模式;薛传亮等人分析了驾驶人注视点随时间序列的分配转移情况[10];吴付威等研究了高速公路跟车过程中驾驶人注视转移模式[11]。
目前,由于研究条件限制,国内外在驾驶员注视转移、注意力分配方面,在特长隧道中开展实车实验的研究较少,且目前单一因素对驾驶人注视转移特性影响的研究成果较多,但针对驾驶经验与驾驶环境对驾驶人注视转移模式的研究还较少。鉴于此,拟开展高速公路特长隧道行车条件下的职业与非职业驾驶人眼动追踪实验,利用头戴式眼动仪采集32名驾驶人注视行为数据。对比不同行车环境下,不同驾驶经验驾驶人的注视分配与转移特性,分析造成视觉特性差异的原因,以期为深入研究驾驶人的视觉特性规律,进而提高驾驶人行车安全性奠定基础。
1 实验设计及数据采集
1.1 实验路段
本选选取福(州)—银(川)高速陕西境内的蓝(田)—商(洛)段为实验路段,全长92.13 km,所辖路段共35座隧道,均为双洞单向两车道隧道,隧道总长18 563 m。选取该路段典型特长高速公路隧道—秦岭隧道作为主要研究对象,隧道全长4 748 m,内有照明设施,限速60 km/h,实验路段普通道高速公路路段限速80 km/h。
为了研究方便,本论文参照《公路隧道设计规范》(JTG D70-2004)及《公路路线设计规范》(JTG D20-2006)对隧道进行分段[12-13]:隧道入口段为隧道入口前300 m至进入隧道后300 m;隧道出口段为隧道出口前300 m至驶出隧道后300 m;中间路段则为隧道行车段。为体现特长隧道环境对驾驶人注视点分布影响的普遍性,排除因道路线形、安全设施等因素的影响,不仅考虑了典型隧道的选取,并在数据处理方法上做了一定调整。其中,入口段包括秦岭隧道上下行方向入口段,同理,行车段、出口段也涵盖两个方向,以此提炼特长隧道环境中驾驶人注视点分布特性,而非单一隧道的特定方向。
1.2 被试者选取
实验招募了32名驾驶员,包括16名职业驾驶员与16名非职业驾驶员。职业驾驶员熟悉实验路段环境,在实验路段的驾驶里程超过30 000 km,非职业驾驶员对本实验路段并不熟悉,在实验路段的驾驶里程小于500 km。为确保实验人员的安全和数据的真实完整性,实验招募的所有驾驶人均持有机动车驾驶证,视觉机能正常,无生理缺陷和重、特大事故经历。
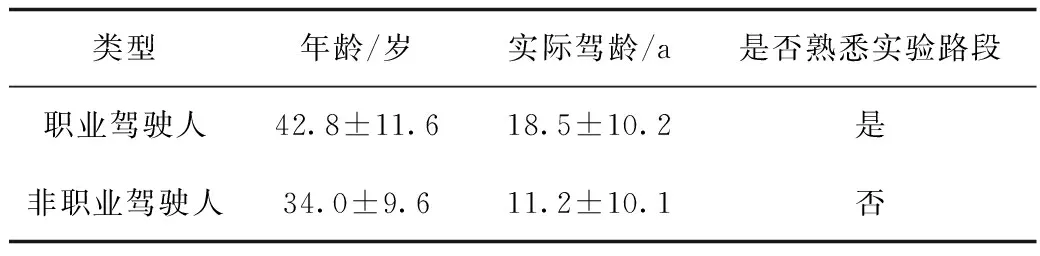
表1 驾驶人信息(均值±标准差)
1.3 实验车辆及设备
实验采用德国SMI公司设计制造的iView X系列的一款非接触式头戴式眼动仪,其采样频率为50~60 Hz,用于跟踪监测驾驶人的眼动行为,通过配备的BeGaze软件即可在线或离线分析眼动数据,并可查看驾驶人实验过程中的眼动录像。实验车辆是起亚佳乐自动档5座车。此外,实验还包括车载电源等其他相关实验装置。
1.4 实验过程
实验过程遵循双盲设计原则,并尽可能地控制其他因素对驾驶行为的影响。连接校正好实验设备后,告知驾驶人根据以往驾驶习惯驾驶,合理按照交通标志的要求自由行驶并穿过隧道。试验过程中,眼动仪实时记录驾驶人眼动数据。为保证数据的有效性和消除相关因素的影响,在隧道上下行路段各往返进行1次实验,取2次采集数据平均值为其视觉特征变化数据。
由于实验条件和眼动仪视野限制,当驾驶人注视车内后视镜时,使得头戴式眼动仪上下晃动,影响眼动数据的精度及准确性。本研究暂不考虑驾驶人对车内后视镜的注视,运用K值聚类法,对被试者的车外注视点位置进行聚类,当k=6时,聚类界限比较清晰,单因素方差分析结果表明类别间具有显著性差异(sig.=0.001)。之后,再通过视频回放的方式,将车内后视镜注视点分布数据进行收集处理,最后得出注视区域划分结果,见表2。

表2 注视区域划分
2 注视分布特性
2.1 隧道段与普通路段注视分布情况
特长隧道段与高速公路普通路段职业与非职业驾驶人对各区域的注视分布情况如图1,2所示。

图1 隧道段注视分布比例Fig.1 Fixation distribution ratio in tunnel

图2 普通路段注视区分布比例Fig.2 Fixation distribution ratio on open road
不同经验驾驶人在不同的道路环境中驾驶,其注视特性存在一定的差异。由图1可知,在特长隧道段,职业驾驶人注视区域主要为中间远处区域,其次为中间近处区域;非职业驾驶人较为关注中间近处区域,其次为右侧区域与右后视镜。这表明:职业驾驶员较为能够提取远方道路的信息,而非职业驾驶员不熟悉路段环境,更关注道路近端的路况,且需要及时关注道路右侧设置的交通标志标牌来获取信息。由图2可知,在普通路段,职业驾驶员对左侧区域及左后视镜关注度有所提高,非职业驾驶员对左侧及前方道路远处的关注度有所提高。
2.2 隧道不同段注视分布情况
为更好的研究高速公路特长隧道不同段驾驶人的注视特性规律,将隧道段分为入口段、出口段及行车中间段,隧道各段注视分布比例如图3,4,5所示。
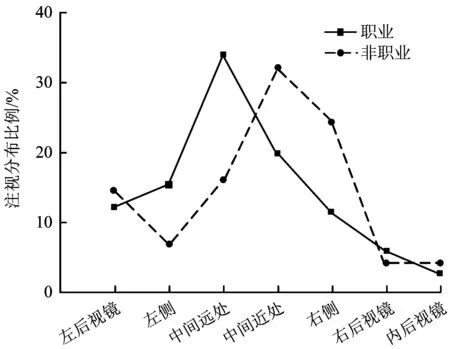
图3 隧道入口段注视分布比例Fig.3 Fixation distribution ratio at tunnel entrance

图4 隧道出口段注视分布比例Fig.4 Fixation distribution ratio at tunnel exit

图5 隧道中间段注视分布比例Fig.5 Fixation distribution ratio at middle section of tunnel
由图3,4,5可知,职业驾驶人在隧道出入口以及中间段,主要关注的区域相似且注视分布比例变化不大,可见驾驶环境的切换对职业驾驶人注视模式影响不大,而非职业驾驶员主要关注的区域因行车环境不同变化较大。
3 注视转移特性
3.1 注视转移模式
在已知时刻t0系统所处状态的条件下,时刻t0以后系统到达的状态完全取决于时刻t0系统所处的状态,与时刻t0以前系统所处的状态无关,这个特性就是马尔科夫性[14]。驾驶人注视点落在不同区域为不同的状态,下一个注视点落在哪个区域只与当前注视点所在区域有关,这是一个典型的马尔科夫链。本文利用马尔科夫链理论,运用统计估算的方法求解驾驶人在各注视区域间转移的一步转移概率和平稳分布,分析不同经验驾驶人在不同路段的注视转移基本规律。本研究将选取的职业与非职业驾驶人注视数据做平均处理,得到不同经验驾驶人在高速公路特长隧道不同段与普通路段的一步转移概率见表3~6。

表3 高速公路隧道入口段的注视一步转移概率分布

表4 高速公路隧道中间段的注视一步转移概率分布
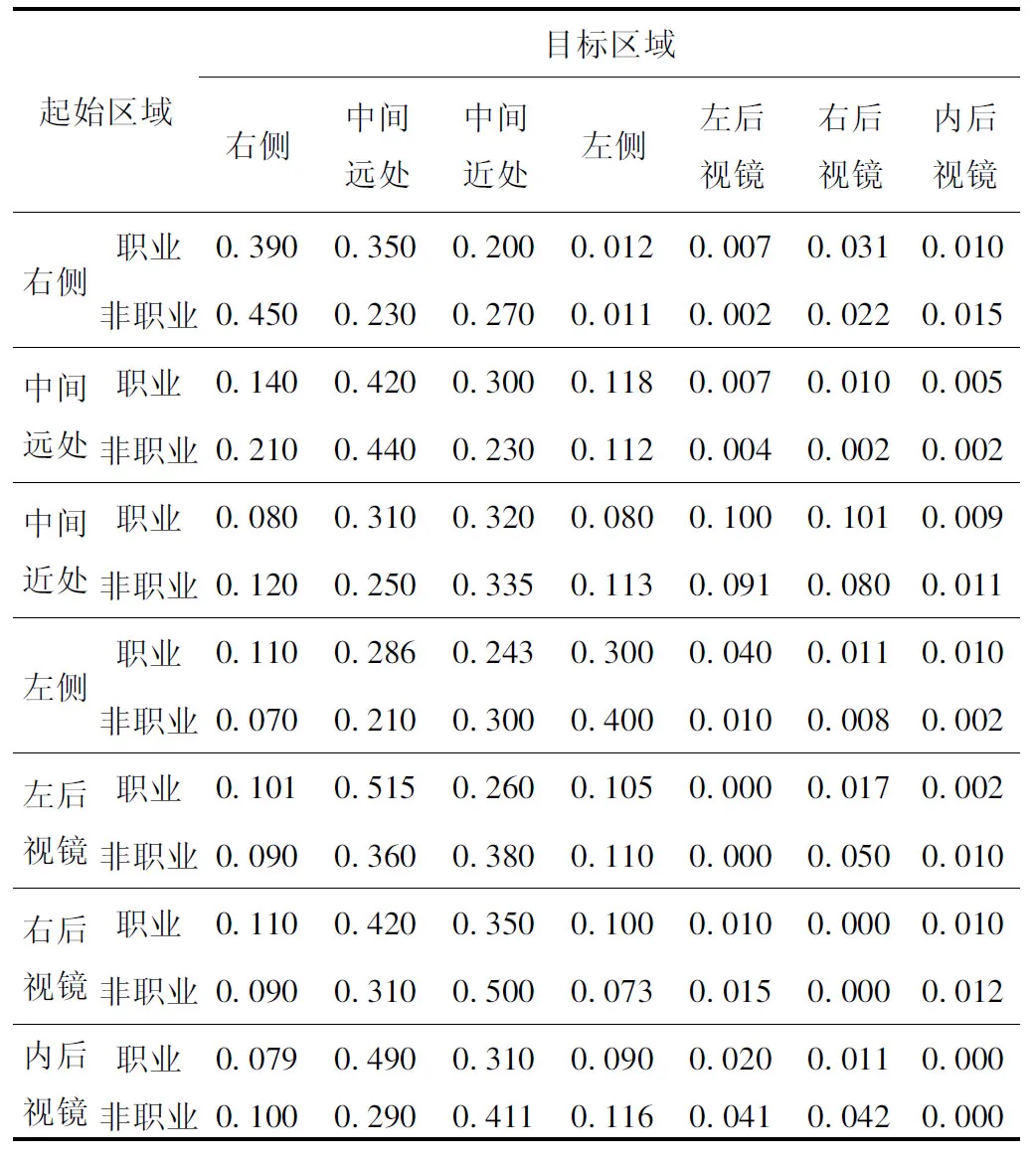
表5 高速公路隧道出口段的注视一步转移概率分布

表6 高速公路普通路段的注视一步转移概率分布
结合注视区域的划分结果,由表3,4,5,6可分析得出不同经验驾驶人行驶于各个路段,注视行为在各区域间转移时的规律:
1)在特长隧道路段,驾驶人注视点从其他区域转移到左右后视镜与内后视镜区域的概率很小,且不会重复注视,而从左右后视镜及内后视镜转移到中间区域(中间远处+中间近处)的概率超过70%。相较于隧道段,在普通路段注视点从左右侧及中间区域转移到左右后视镜概率增加。且行驶于普通路段,驾驶员对车辆后方交通信息关注度增加,会重复注视左右后视镜及内后视镜。
2)除去左右后视镜及内后视镜区域,在主对角线上的转移概率值大于其他概率值。位于主对角线上的概率值为驾驶员对同一区域的重复注视概率值,驾驶员在隧道各段对各区域的重复概率大于普通路段,职业驾驶人对某区域的重复注视概率小于非职业驾驶人。这说明,驾驶人通过某一区域获取信息时,并不能通过一次注视完成,需要重复注视,且当处理信息难度增加或驾驶员不熟悉交通环境时,对目标的重复注视概率会增加。
3)驾驶人在隧道入口处,对右侧及中间近处的重复注视概率比较大,且与普通路段相比,注视点从其他区域转移到中间近处的概率增大。回放眼动仪视记录的视频可知,隧道入口处标识标牌密集,车辆密度增大,驾驶人会较多的注视前方道路近处的目标,保证行车安全;在隧道中间段行驶时,驾驶人对左、右侧区域的重复注视概率最高,其次是中间远处区域。这表明:隧道内侧墙上布置有大量交通标志标牌,驾驶人关注度较高,且隧道在照明、视距等方面均受到较大的限制,驾驶员需要观察左右侧车道线等目标物以保持车辆在车道中的位置;与中间路段相比,在隧道出口段,驾驶人从其他区域向中间远处区域的一步转移概率增大。
3.2 注视平稳分布求解与分析
马尔可夫平稳分布是一种预测,即指经历长时间历程后,分配到各个区域的注视点的概率达到一个稳定值。设{Xn,n≥0}是齐次的马尔可夫链,状态空间为E,转移概率为pij,存在概率分布{πi,j∈E},若满足公式(1),则称{πi,j∈E}为马尔可夫链的平稳分布[15]。
(1)
根据马尔可夫链的相关性质,利用职业与非职业驾驶人的注视数据建立的马尔可夫链是不可约且非周期的,故此马尔可夫链存在平稳分布。根据职业与非职业驾驶人的注视一步转移概率,可以建立六元一次方程组,分别得出不同经验驾驶人在隧道入口段、出口段、中间段以及普通路段的注视平稳分布。

(2)
根据马尔可夫平稳分布性质可知,经过长时间的驾驶,驾驶人对各区域的注视点分布会趋于稳定,则驾驶人的注视平稳分布值表明:
1)行驶于不同路段,驾驶人超过50%的注视点分布在中间区域,这表明行车时,中间区域是驾驶人获取交通信息的主要区域,这与文献[16]中关于驾驶人注视中心区域的比例的研究结果相一致。驾驶人在普通路段行车,对左右后视镜及内后视镜区域的关注度基本上都高于隧道段。这表明在普通路段行车,驾驶人超车、换道需求较高,需要通过观察后视镜获取车辆后方交通信息,从而判断周围环境是否满足超车换道条件。
2)在隧道入口处,由于车辆密度增大,标志标牌较多,职业与非职业驾驶人都会较多的注视前方道路近处的目标,确保行车安全。相比于非职业驾驶员,职业驾驶员在隧道中间段、出口段及普通段行车段,注视点大概率出现在前方道路远处,这表明:职业驾驶人习惯注视较远处的交通情况,具有较好的前瞻性[17],该特性可以保证驾驶人提前做好准备,有利于行车安全。总体来看,非职业驾驶员注视点落在右侧区域的概率都高于职业驾驶员,表明非职业驾驶员由于不熟悉道路环境,对其行车方向的交通标志标牌更为关注。
为进一步研究行车环境与驾驶经验对各区域注视平稳分布的影响程度,对职业与非职业驾驶人在四种行车路段下的注视平稳分布进行双因素方差分析,结果见表7。
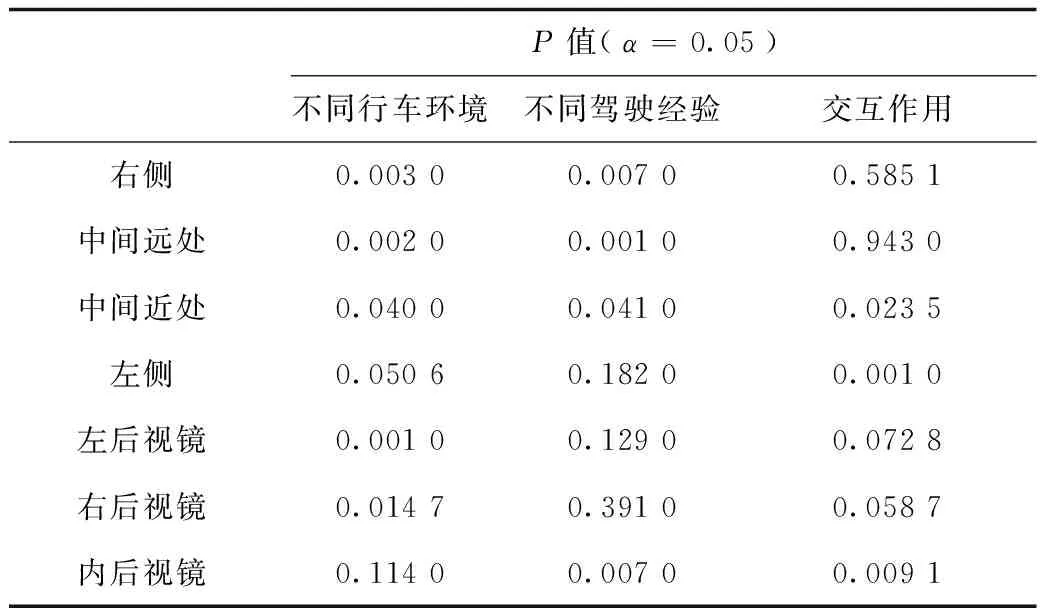
表7 注视平稳分布差异性检验
由表7可知,不同的行车环境对驾驶人在右侧、中间区域及左右后视镜区域的注视平稳分布存在显著影响;驾驶经验对驾驶人右侧、中间区域及内后视镜区域的注视平稳分布影响显著;行车环境及驾驶经验对中间近处、左侧区域及内后视镜区域的注视平稳分布有显著的交互作用。
4 结论
1)相比于非职业驾驶员,隧道中行车环境的切换对职业驾驶人的注视模式影响较小,且职业驾驶员在不同路段行车,注视前瞻性明显。
2)在不同路段行车,驾驶员主要是通过注视中间近处与远处区域来获取信息;驾驶员对同一目标需要重复注视才能提取足够的信息,特别地,当驾驶环境复杂或驾驶人不熟悉行车环境时,视觉搜索效率降低,重复注视目标的概率增加。此外,行车环境及驾驶经验对驾驶人注视平稳分布存在一定交互作用。
3)基于本文得出的不同经验驾驶员在不同行车段中的注意分配特性及注视转移规律,可针对新手驾驶员进行培训,改善其视觉搜索模式,从而提升其驾驶安全性。同时研究结果对高速公路特长隧道段的交通安全设施设置有一定的指导作用。在今后的研究中,可根据不同经验驾驶人视觉搜索特性,分析驾驶经验对危险感知的影响。
[1] 贾伟,高速公路隧道安全评价研究[D].西安:长安大学,2009.
[2] 闫国利, 田宏杰, 张仙峰. 汽车驾驶行为的眼动研究[J]. 心理科学, 2005, 28(5):1211-1212.
YAN Guoli, TIAN Hongjie, ZHANG Xianfeng. A review of studies of eye movement during driving[J]. Psychological Science, 2005, 28(5):1211-1212.
[3] 袁伟, 付锐, 郭应时. 城市道路环境中驾驶员眼动行为特征[J]. 交通信息与安全, 2013, 31(1):117-121.
YUAN Wei, FU Rui, GUO Yingshi. Characters of driver’s eye movements on urban roadways [J]. Journal of Transportation Information and Safety, 2013, 31(1):117-121
[4] 郭应时, 袁伟, 付锐,等. 基于注视转移模式的驾驶熟练程度评价方法[J]. 交通运输工程学报, 2014(4):98-104.
GUO Yingshi, YUAN Wei, FU Rui, et al. Evaluation method of driving proficiency based on fixation transition mode[J]. Journal of Traffic and Transportation Engineering, 2014(4):98-104.
[5] BURLING J, LU H, TODOROVA G, et al. A comparison of eye-movement patterns between experienced observers and novices in detecting harmful intention from surveillance video[J]. Journal of Vision,2016, 16(12):1340.
[6] UNDERWOOD G, CRUNDALL D, CHAPMAN P. Selective searching while driving: the role of experience in hazard detection and general surveillance[J]. Ergonomics, 2002, 45(1):1-12.
[7] UNDERWOOD G, CHAPMAN P, BOWDEN K, et al. Visual search while driving: skill and awareness during inspection of the scene[J]. Transportation Research Part F Traffic Psychology &Behaviour, 2002, 5(2):87-97.
[8] UNDERWOOD G, CHAPMAN P, BROCKLEHURST N, et al. Visual attention while driving: sequences of eye fixations made by experienced and novice drivers.[J]. Ergonomics, 2003, 46(6):629-46.
[9] Falkmer T, Gregersen N P. A comparison of eye movement behavior of inexperienced and experienced drivers in real traffic environments.[J]. Optometry & Vision Science Official Publication of the American Academy of Optometry, 2005, 82(8):732.
[10] 薛传亮. 城市道路交通环境下驾驶员注视点分配转移特性研究[D]. 西安:长安大学, 2009.
[11] 吴付威, 付锐, 吴晨,等. 高速公路跟车过程中驾驶人注视转移模式研究[J]. 中国安全科学学报, 2013, 23(10):44-50.
WU Fuwei, FU Rui,WU Chen, et al. Research on driver’s fixation transition mode during car following process on expressway[J]. China Safety Science Journal, 2013, 23(10):44-50
[12] 重庆交通科研设计院. 公路隧道设计规范[M]. 北京:人民交通出版社, 2004.
[13] 中交第一公路勘察设计研究院. 公路路线设计规范:JTG D 20-2006[S]. 北京:人民交通出版社, 2006.
[14] 吴付威, 付锐, 牛增良. 车辆换道过程中驾驶人注视转移模式研究[J]. 交通运输系统工程与信息, 2014, 14(2):68-73.
WU Fuwei, Fu Rui, NIU Zengliang. Driver’s fixation transition mode during lane changing process[J]. Journal of Transportation Systerms Engineering and Information Technology, 2014, 14(2):68-73.
[15] WaiKC.马尔可夫链:模型、算法与应用[M]. 北京:清华大学出版社, 2015.
[16] Victor T W, Harbluk J L, Engström J A. Situation awareness and secondary task performance while driving[J]. Transportation Research Part F Traffic Psychology & Behaviour, 2005, 8(2):167-190.
[17] Dishart D C, Land M F.The development of the eye movement strategies of learner drivers[M].Oxford England: Elsevier Publishing, 1999:403-411.
猜你喜欢
智能建筑与智慧城市(2022年9期)2022-09-28 12:07:56
兰州理工大学学报(2021年5期)2021-11-02 03:01:22
体育时空(2017年6期)2017-07-14 09:24:48
中国新闻周刊(2017年21期)2017-06-15 10:42:00
汽车与安全(2016年5期)2016-12-01 05:22:12
复旦学报(自然科学版)(2016年4期)2016-09-21 05:30:42
汽车零部件(2015年8期)2015-06-23 13:53:51
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11
汽车科技(2015年1期)2015-02-28 12:14:52