
基于机器视觉的电子式健康秤自动检定系统设计
2017-04-10 01:10胡建国吴晖辉罗永贤黄丽丹
顺德职业技术学院学报 2017年1期
胡建国,吴晖辉,罗永贤,黄丽丹
(顺德职业技术学院 机电工程学院,广东 佛山 528333)
基于机器视觉的电子式健康秤自动检定系统设计
胡建国,吴晖辉,罗永贤,黄丽丹
(顺德职业技术学院 机电工程学院,广东 佛山 528333)
针对目前电子式健康秤采用人工检定存在的劳动强度大、工作效率低和工人易出错等问题,开发了基于机器视觉的自动检定系统。利用机器视觉系统进行LCD显示屏字符识别、误差计算和结果判定;通过伺服电缸进行增砣砝码的逐级加载和卸载;采用气缸实现检测产品的送料和退料。结果表明:视觉系统可实现LCD字符的精确快速识别,检定系统可完成电子式健康秤的自动计量检定,具有高效、高精和智能等特点。
电子秤;计量检定;机器视觉;伺服电缸
电子衡器是国家强制管理的计量器具,需要在出厂前进行计量检定,以保证计量准确性[1]。某电子式健康秤在包装前要求在四个计量点进行检定测试,目前采用人工方式检定,测试产品需要工人送料和退料﹑加载设备需要手动启动和停止﹑加载结果需要人眼读数和判定,存在工作强度大﹑检定效率低﹑检定质量易受人为因素影响等问题[2-3]。
开发电子式健康秤自动检定系统是解决上述问题的途径,但关键需要解决检定过程中的自动送退料﹑自动加卸载和自动读判数问题,其中,自动上下料和自动加卸载属于位置控制问题,自动读判数属于图像识别问题。位置控制是自动控制领域的成熟技术,而机器视觉是工业自动化领域的一项新型技术,用机器代替人眼和人脑来做测量和判断,已广泛应用于字符识别﹑定性检测﹑定量测量﹑视觉导引等工业领域[4-6]。
本文将设计一种基于机器视觉的电子式健康秤自动检定系统,采用气缸解决自动送退料问题,采用伺服电缸解决自动加卸载问题,采用机器视觉系统解决自动读判数问题,实现电子式健康秤的自动﹑精确﹑快速﹑智能检定。
1 机械系统
图1所示为利用Solidworks软件设计的电子秤自动检定系统整机机械系统三维装配图,包括底座﹑立架﹑对电子秤进行标准砝码逐级加载的加载系统和为加载系统进行电子秤供给的供料系统等。

图1 整机机械系统三维装配图
1.1 加载系统
图2所示为加载系统结构图,包括伺服电机﹑减速带轮﹑伺服电缸﹑钢丝索﹑滑轮﹑滑块和三个等质量的标准砝码。

图2 加载系统结构图
伺服电机的旋转运动经同步带(减速比i =1∶1)减速后,通过伺服电缸内的滚珠丝杠(导程d = 5 mm)变换为电缸端部吊环的直线运动,吊环通过钢丝索﹑滑轮﹑滑块和吊钩拉动砝码,三角形吊钩的下边与下面砝码固联,其上角悬挂在上面砝码(或滑块)的吊臂上,通过控制滑块的高度位置,可实现标准砝码对电子秤的加载和卸载。
加载系统的主要设计计算为伺服电机在最大负载下加速时驱动扭矩的计算,根据动静法有

式中,Fa为丝杠轴向负载,η为丝杠效率,Tb为支撑轴承摩擦阻力矩,Tc为预紧扭矩,Ndif为加速时间ta内的转速增量,Je为折算到电机轴端的惯性矩,包括伺服电机转子惯性矩﹑同步带轮等效惯性矩﹑丝杠等效惯性矩﹑滑轮等效惯性矩以及负载惯性矩等。
1.2 供料系统
图3所示为供料系统结构图,包括单杆气缸﹑托盘和直线导轨等。直线导轨主要承垂直方向标准砝码的工作负荷,该值为直线导轨的选型计算依据。气缸的设计计算主要包括动能校核和负载校核,负载校核要求实际负载不大于允许负载,即W≤Wa,动能校核要求实际动能不大于允许动能,即E≤Ea, 其中

式中,Va为气缸动作平均速度。

图3 供料系统结构图
2 控制系统
2.1 硬件设计
图4所示为电子秤自动检定系统基于可编程控制器的控制系统硬件结构示意图。控制器除了进行常规的顺序控制外,需要与视觉控制器进行信息交换,实现相机快门的触发和判断结果的接收,还需要对伺服电机进行运动控制,实现三个标准砝码的加载和卸载。
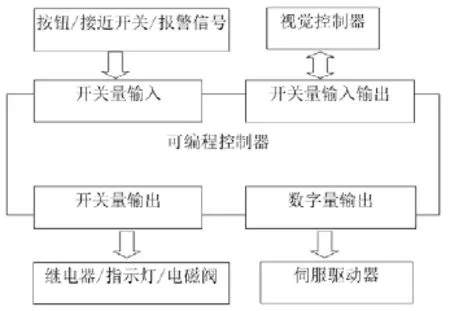
图4 控制系统硬件结构示意图
2.2 软件设计
电子秤自动检定系统的控制流程如图5所示。在满足外部和内部运行允许后,供料系统﹑视觉系统和加载系统在控制系统控制下相互配合,完成电子秤自动检定流程动作,如判断物料有无﹑逐级加载时LED示值是否正常,最终将判定结果输出给物料输送单元,以作为电子秤分拣依据。
3 视觉系统
机器视觉是用机器代替人眼进行测量和判断的技术。机器视觉产品采集目标图像,并进行数字化处理和特征信息提取,最后根据预设的允许度和其它条件输出结果,用以控制现场的设备动作。
本视觉系统的结构框架如图6所示。安装于电子秤LCD窗口上方的工业相机在逐级加载时拍摄LCD示值读数,并将采集到的图像传递给视觉控制器进行图像预处理﹑特征提取和字符识别,并与预定值进行比较,判断电子秤测量精度是否达到要求,并将判断结果输出给可编程控制器。其中,工业相机采用德国BASLER公司的Ace系列支持GigEVision标准协议的面阵相机,镜头﹑控制器和LED光源分别采用东莞奥普特公司的定焦镜头OPT-C2514﹑一体化视觉控制器SCI-Q2和白色条形光源OPT-LI32330-W-AA。
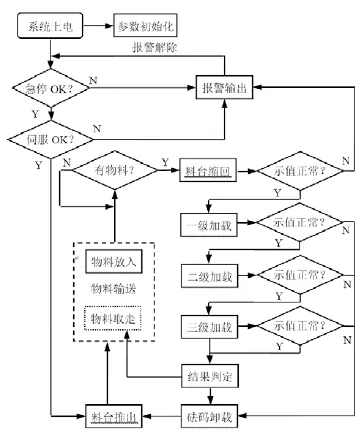
图5 控制系统硬件结构示意图

图6 视觉系统结构示意图
4 测试结果
利用上述机械系统﹑控制系统和视觉系统,在20 kg计量点采集到的源图像如图7a所示,对源图像进行二值化和分割预处理后得到的图像如图7b所示,其中1~4代表分割后的4个字符。
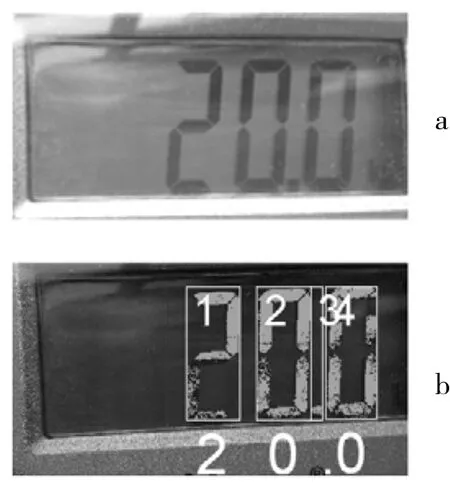
图7 源图像与预处理图像
进行字符训练后在0 kg﹑20 kg和40 kg计量点自动字符识别后得到的图像分别如图8a﹑8b和8c所示。

图8 字符自动识别结果
图8c中,在40 kg计量点,测得读数为39.7 kg,程序自动判定该电子称在该计量点测量精度不合格,判定结果通过图像控制器的I/O接口输出给可编程控制的输入端,不合格电子称将被分拣出来,自动判定程序如下:

5 结论
1)设计了一种用于电子式健康秤自动计量检定的系统,该系统有效解决了人工检定存在的劳动强度大﹑工作效率低和读数易出错等问题。
2)实现了对电子秤四个计量点的自动逐级加载和示值LCD字符的智能识别,该方法可大幅提高电子式健康秤的检定精度和检定效率。3)该自动检定设备实现了电子式健康秤制造过程中检定生产环节的自动化和智能化,提高了电子式健康秤装配线的自动化水平。
[1] 青岛市技术监督局. JJG 539—1997 数字指示秤检定规程[S]. 北京:国家技术监督局,1997.
[2] 厉志飞,王成李,赵伟国,等. Labview的电子秤自动检定装置设计[J].中国计量学院学报,2012,23(2):141-144.
[3] 孙斌,赵伟国,郑永军. 移动式电子秤现场自动检定校准装置:101846546 B[P].2011-07-20.
[4] 廖强,周忆,米林,等. 机器视觉在精密测量中的应用[J]. 重庆大学学报(自然科学版),2002,25(6):1-4.[5] 韦争亮,黄志斌,古耀达,等. 基于机器视觉与运动控制的轨距尺检定器自动化检测技术研究[J].中国测试,2014,40(3):23-27.
[6] 袁清珂,张振亚,吴晖辉,等. 基于机器视觉系统的自动检测系统设计与开发[J].组合机床与自动化加工技术,2014(11):119-121.
Design of Automatic Verification System for Electronic Personal Scales Based on Machine Vision
HU Jianguo,WU Huihui,LUO Yongxian,HUANG Lidan
(School of Mechanical and Electrical Engineering, Shunde Polytechnic, Foshan Guangdong 528333,China)
To solve high labor intensity,low work efficiency and error-prone problems in the manual verification process of electronic personal scales,an automatic verification system based on machine vision was developed. The LCD display screen's character recognition, error calculation and result determination are conducted by means of machine vision. The step by step loading and unloading of weight-increasing weights are done by linear actuator driven by servo motor. The feeding and returning of products are carried out by air cylinder. The results show that the vision system can realize exact and fast recognition for the LCD characters and the verification system can be competent for the automatic metrological verification for electronic personal scales,with characteristics of high efficiency,high precision and intelligence.
electronic personal scale;metrological verification;machine vision;servo linear actuator
TH122
:A
:1672-6138(2017)01-0001-04
10.3969/j.issn.1672-6138.2017.01.001
[责任编辑:吴卓]
2016-11-08
胡建国(1979—),男,湖北咸宁人,副教授,研究方向:制造装备的设计﹑优化与控制。
猜你喜欢
小学生学习指导(低年级)(2022年11期)2022-12-07
小猕猴学习画刊(2022年9期)2022-11-04
煤气与热力(2022年2期)2022-03-09
甘肃教育(2020年20期)2020-04-13
数学小灵通(1-2年级)(2018年6期)2018-06-28
电子制作(2018年2期)2018-04-18
电子制作(2018年2期)2018-04-18
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
数学大王·中高年级(2015年6期)2015-06-26
