
基于滑模变结构的无人机导引律仿真研究
2017-04-10 15:38徐啟云王洁王鹏飞郝文渊��
航空兵器 2017年1期
关键词:无人机
徐啟云+王洁+王鹏飞+郝文渊��


摘要: 为了提高无人机导引律控制的稳定性, 采用滑模变结构导引律控制方法。 根据一定的假设条件, 建立无人机三自由度模型, 根据运动模型和初始状态得到实际飞行轨迹。 由滑模变结构导引律得到无人机的期望轨迹, 通过实际轨迹与期望轨迹之间的误差来驱动控制。 仿真结果表明, 无人机在导引律控制过程中控制量变化平稳, 验证了该方法的有效性和合理性。
关键词: 无人机; 相对运动模型; 滑模变结构; 导引律
中图分类号: V249文献标识码: A文章编号: 1673-5048(2017)01-0045-05[SQ0]
0引言
随着新军事变革的发展, 无人机凭借自身独特优势[1], 将成为未来战争的统治者。 无人机的导引控制是无人机发展的重要方向, 是目前控制领域的研究热点。 导引控制中的外界扰动和参数摄动问题, 严重影响了无人机的进一步发展[2]。 目前, 无人机导引方法主要是比例导引法或者在比
例导引法基础上改进的方法[3]。 随着无人机作战需求的不断提高, 飞行包线越来越大, 传统的小
扰动线性化导引方法已经不能满足需要。
为了提高无人机导引控制的稳定性, 将变结构理论应用于导引律设计中, 推导得到滑模变结构导引律。
1数学模型
1.1无人机运动模型
无人机六自由度模型主要为质心平动和绕质心转动的动力学和运动学方程。 雖然六自由度模型比较全面, 但是涉及的因素较多, 模型解算非常困难。 为了便于仿真计算, 对模型进行简化, 将导引过程分为侧向平面和纵向平面的运动, 并假设:
3仿真结果与分析
3.1仿真初始条件
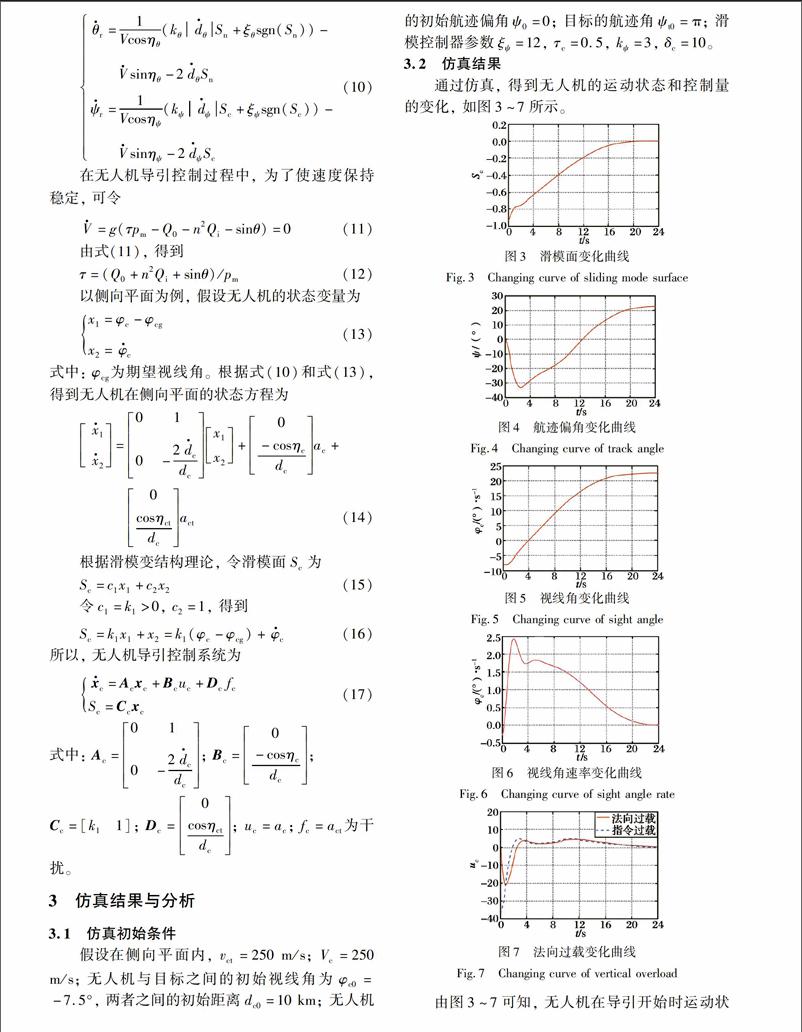
假设在侧向平面内, vct=250 m/s; Vc=250 m/s; 无人机与目标之间的初始视线角为φc0=-7.5°, 两者之间的初始距离dc0=10 km; 无人机的初始航迹偏角ψ0=0; 目标的航迹角ψt0=π; 滑模控制器参数ξψ=12, τc=0.5, kψ=3, δc=10。
3.2仿真结果
通过仿真, 得到无人机的运动状态和控制量的变化, 如图3~7所示。
由图3~7可知, 无人机在导引开始时运动状态和控制量变化比较剧烈, 随后变化逐渐平缓, 在20 s后, 导引控制器进入滑模面并平稳滑动。
这是因为无人机不需要考虑飞行员的生理限制, 具备独特的优势。 在导引初始阶段充分利用无人机可用过载较大的特点, 使系统状态迅速进入滑模面, 提高了无人机的机动性, 能够及时把握战机。 在进入到滑模面后, 无人机能够在导引末端保持稳定, 并较好地跟踪过载指令。
3.3可行性分析
假设tf为无人机捕获目标的时刻, 即无人机和目标相距1 km时刻, 定义无人机的能量消耗为
Y=∫tft0adt(18)
式中: a为无人机的加速度; t0为导引开始时刻。 分别得到传统比例导引律控制方法和无人机滑模变结构导引律控制方法的捕获目标时间及能量消耗, 如表1所示。
4结论
将变结构理论引入导引律的设计中, 解决了因模型信息未知和参数摄动引起的导引控制不稳定问题, 提高了无人机导引控制的稳定性, 改善了系统辨识能力, 弱化了导引律对模型的依赖。 通过仿真得到无人机的运动状态和控制量变化曲线, 验证了导引律优化设计的有效性。
参考文献:
[1] 汪洋亮,王国胜,李忠良. 基于PID的高速无人机高度控制系统设计[J].舰船电子工程,2009, 29(2):163-168.
Wang Yangliang, Wang Guosheng, Li Zhongliang.Design of the HighSpeed UAVs Height Control System Based on PID[J].Ship Electronic Engineering,2009, 29(2):163-168.(in Chinese)
[2] 潘云芝, 潘传勇. 导引律研究现状及其发展[J]. 科技信息, 2009 (13): 40-41.
Pan Yunzhi, Pan Chuanyong. The Status of Guidance Law and Its Development[J].Science & Technology Information, 2009 (13): 40-41.(in Chinese)
[3] 吴文海, 曲建岭, 王存仁, 等. 飞行器比例导引综述[J]. 飞行力学, 2004, 22(2): 1-5.
Wu Wenhai, Qu Jianling, Wang Cunren, et al.An Overview of the Proportional Navigation[J].Flight Dynamics, 2004, 22(2): 1-5.(in Chinese)
[4] 赵振宇,卢广山. 具有未知干扰的无人机鲁棒滑模飞行控制[J].计算机仿真, 2012, 29(2): 63-68.
Zhao Zhenyu, Lu Guangshan. Robust Sliding Mode Flight Control for Unmanned Aerial Vehicles with Unknown Disturbance[J].Computer Simulation,2012, 29(2):63-68.(in Chinese)
[5] 施蓉花. 无人机自主飞行控制和自主攻击研究[D]. 南京: 南京航空航天大学, 2008.
Shi Ronghua. UAVs Autonomous Flight Control and Autonomous Attack Research[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2008.(in Chinese)
[6] 黃长强, 曹林平, 翁兴伟, 等. 无人作战飞机精确打击技术[M]. 北京: 国防工业出版社, 2011.
Huang Changqiang, Cao Linping, Weng Xingwei, et al. The Precision Strike Technology of UCAV[M].Beijing: National Defence Industry Press, 2011.(in Chinese)
[7] Rajasekhar V, Sreenatha A G. Fuzzy Logic Implementation of Proportional Navigation Guidance[J]. Acta Astronautica, 2000, 46(1): 17-24.
[8] Boksenbom A S, Hood R. General Algebraic Method Applied to Control Analysis of Complex Engine Types, NACATR980[R]. Washington D C: NACA, 2012.
[9] Chavez F R, Schmidt D K. An Integrated Analytical Aeropropulsive/Aeroelastic Model for the Dynamic Analysis of Hypersonic Vehicles[C]∥AIAA Atmospheric Flight Mechanics Conference, Hilton Head Island, South Carolina, 1992.
[10] Shakiba M, Serrani A. Control Oriented Modeling of 6DOF Hypersonic Vehicle Dynamics[C]∥ AIAA Guidance, Navigation, and Control Conference and Exhibit, Portland, Oregon, 2011.
[11] Bolender M A, Doman D B. A NonLinear Model for the Longitudinal Dynamics of a Hypersonic AirBreathing Vehicle[C]∥ AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, California, 2005.
[12] Torrez S M, Scholten N A, Micka D J, et al. A Scramjet Engine Model Including Effects of Precombustion Shocks and Dissociation[C]∥44th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Hartford, Connecticut, 2008.
[13] Yates E C, Jr, Bennett R M. Analysis of SupersonicHypersonic Flutter of Lifting Surfaces at Angle of Attack[C]∥AIAA/ASME 12th Structures, Structural Dynamics and Materials Conference, Anaheim, California, 1971.
[14] Triputra F R, Trilaksono B R, Sasongko R A, et al. Longitudinal Dynamic System Modeling of a FixedWing UAV Towards Autonomous Flight Control System Development: A Case Study of BPPT Wulung UAV Platform[C]∥2012 International Conference on System Engineering and Technology, Bandung, Indonesia, 2012.
[15] Campa G, Napolitano M R, Perhinschi M, et al. Addressing Pose Estimation Issues for Machine Vision Based UAV Autonomous Serial Refuelling[J].Aeronautical Journal, 2007, 111(1120): 389-396.
[16] Antonelli G, Chiaverini S, Finotello R, et al. RealTime Path Planning and Obstacle Avoidance for RAIS: An Autonomous Underwater Vehicle[J]. IEEE Journal of Oceanic Engineering, 2001, 26(2): 216-227.
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
