
高轨环境中GNSS可见性及几何精度因子分析
2017-04-10 15:26孙兆妍王新龙��
航空兵器 2017年1期
孙兆妍+王新龙��
摘要: 通过对高轨航天器轨道及全GNSS星座的模拟, 分析了地球同步轨道和大椭圆轨道环境中GNSS的可见性, 以及高轨航天器轨道倾角与轨道高度对GNSS分系统(GPS, GLONASS, BDS, Galileo)可见性的影响, 提出了配置惯性导航系统的方案来解决短时间内可见星缺失、 GNSS间歇性失效的问题, 并通过对惯导器件短时误差的分析验证方案的可行性;为了改善高轨环境中GNSS几何精度因子, 提出了载波相位时间差分的方案, 对比分析了采用非差和差分GNSS所得几何精度因子, 统计结果显示差分GNSS具有更优的几何精度。
关键词: 高轨环境; GNSS; 可见性; 几何精度因子
中图分类号: V249.32+8 文献标识码: A文章编号: 1673-5048(2017)01-0018-10[SQ0]
引言
当前在轨运行的全球导航卫星系统(Global Navigation Satellite System, GNSS)包括美国的全球定位系统(Global Positioning System, GPS)、 俄罗斯的格洛纳斯(GLObalnaya NAvigatsionnaya Sputnikovaya Sistema, GLONASS)、 中国的北斗卫星导航系统
(BeiDou System, BDS)以及欧盟的伽利略卫星导航系统(Galileo Satellite Navigation System, Galileo)。 随着四大卫星导航系统的不断增强和完善, 能够为在轨航天器提供更加广泛的导航授时服务[1]。
适用于航天器的GNSS导航技术可以为各类中低轨卫星和载人航天器提供实时的高精度轨道数据[2], 大幅降低了地面测控网的负担。 但是, 由于GNSS导航卫星发射天线朝向地球, 且主瓣信号发射夹角有限[3], 当航天器轨道高度超出GNSS星座时, 仅能接收到来自地球另一面的导航卫星信号[4], 因此在高轨环境中, 受地球遮挡的限制以及信号自由空间损耗的加大, GNSS导航卫星可见性和信号品质将会变得很差, 部分时间段内无法满足4颗导航星的最低要求; 同时, 由于高轨航天器轨道高度非常大, 并且接收信号来自地球另一面, 严重影响了可见星几何构型[5], 导致几何精度因子的激增。 因此, 目前GNSS应用范围仍局限于中低轨道航天器[6]。
导航卫星可见性及几何精度因子是评价GNSS服务性能的两个重要指标[7-8], 制约着GNSS导航解算精度、 可用性以及完备性等。 导航卫星可见性指当前时刻在接收机天线所在位置能够观测到的卫星数目[9], 一般情况下只有当可观测星数目不小于4颗时才可以完成全维导航[10](PVT);几何精度因子(Dilution Of Precision, DOP)表示接收机观测误差与定位误差之间的比例关系, 一般与可见性以及可观测星的几何构型有关[11-12], DOP越小, 则由相同观测误差导致的定位误差越小[13]。
基于GNSS的高轨航天器自主导航技术是目前国内外的研究热点, 尚处于探索之中, 分析高轨
环境中GNSS可见性及几何精度因子, 有利于高轨航天器轨道参数的优化设计, 对于改善航天器导航定位精度、 提高航天器自主导航能力具有重要的现实意义和应用价值, 也可以为将来中国北斗卫星导航系统的实际航天器轨道应用打下坚实的基础。
1高轨航天器轨道及GNSS星座模拟
1.1高轨航天器轨道模拟
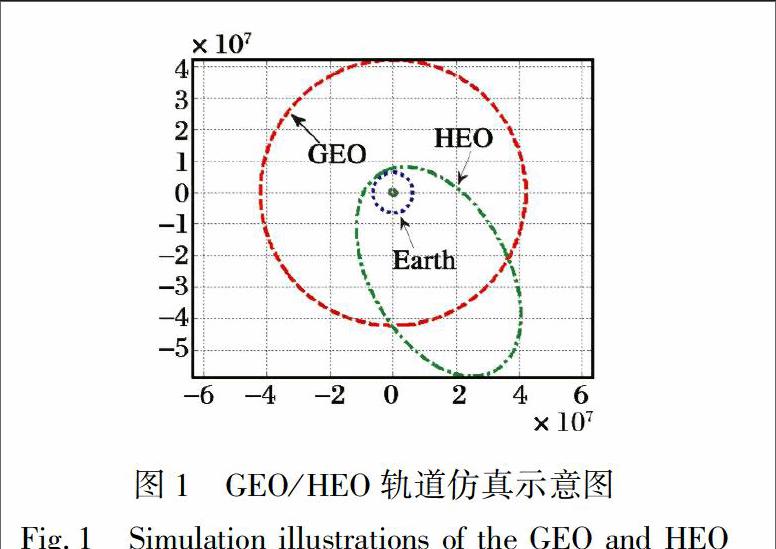
高轨环境主要包括地球同步轨道(Geosynchronous Orbits, GEO)和高偏心率轨道(High Eccentricity Orbits, HEO)。 处于GEO的航天器运行周期与地球自转周期相同, 为23小时56分4秒, 定点于赤道上空35 786 km的某一点。 GEO航天器具有地面覆盖区面积大的优势, 单颗航天器即可覆盖地球表面的40%, 因此等间隔分布的3颗航天器可实现除极地外的全球覆盖。 HEO航天器远地点的轨道高度一般高于35 786 km, 由于在远地点附近运行速度较慢, 航天器对远地点下方地
面区域的覆盖时间超过12小时; 同时, 具有大倾角的HEO轨道可以覆盖地球的极地地区。
为了分析高轨环境下GNSS的可见性及几何精度因子, 以GEO及典型的HEO卫星轨道设计参数[2]为基础, 模拟高轨航天器的运行轨道, 得到GEO和HEO航天器的运行轨迹(视角垂直于赤道平面)如图1所示。
1.2GNSS星座模拟
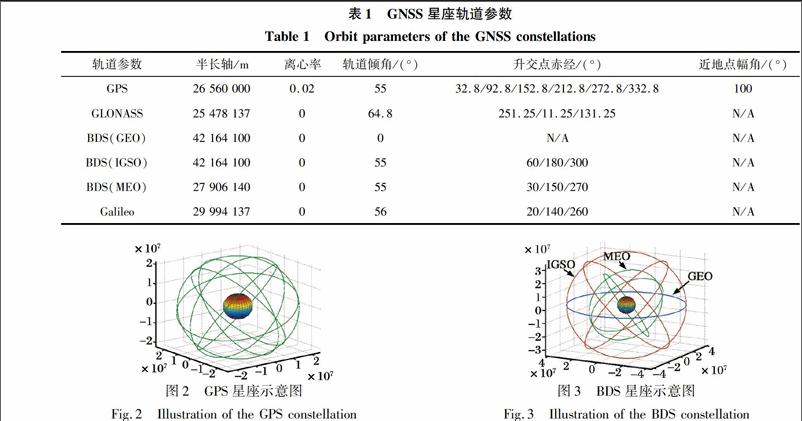
GPS星座可认为是一个定制的Walker星座,
GLONASS星座由三根相距120°的中圆地球轨道组成, 每个轨道上均匀分布8颗卫星, 每颗卫星相距45°[14], 运行周期均为11小时15分44秒。
BDS空间星座由5颗地球同步轨道(GEO)卫星、 27颗中圆地球轨道卫星(均匀分布)和3颗倾斜地球同步轨道(IGSO)卫星组成。 GEO分别定点于东经58.75°, 80°, 110.5°, 140°和160°。
Galileo星座由三個倾角为56°的中圆地球轨道组成, 每个轨道上均匀分布7颗卫星[15]。
四大GNSS卫星导航系统的星座具体轨道参数如表1所示, 并给出GPS以及BDS的星座仿真结果分别如图2和图3所示。
2高轨环境GNSS可见性分析
2.1GEO及HEO可见性分析
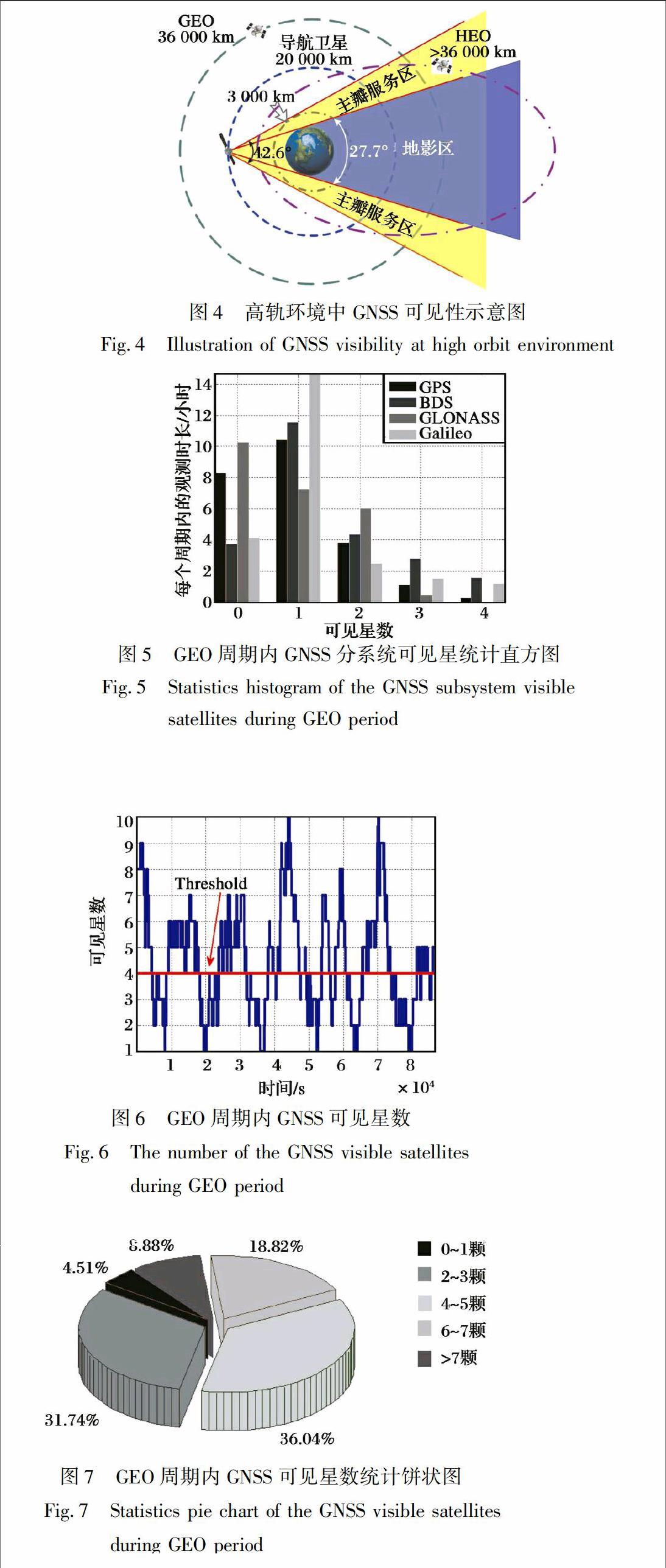
由于GEO或HEO航天器轨道位于GNSS导航卫星的上方, 因此航天器搭载接收机只能接收来自地球另一侧的卫星信号; 同时, 导航卫星下视天线的主瓣信号发射夹角为42.6°, 当航天器轨道高度超过3 000 km时, GNSS的可见性将变差[16], 而在高轨环境中, 被地球遮挡部分(地影区)夹角为27.7°(如图4所示), 则有效主瓣服务区仅为7.45°, 严重影响了高轨环境中GNSS导航卫星的可见性。
从图中可以看出, 在GEO航天器运行周期内, 相比于其他卫星导航系统, 北斗卫星导航系统的可见性最好, 观测到4颗可见星的时长约为2小时, 观测到3颗可见星的时长约为3小时, 明显优于其他卫星导航系统。 由于北斗卫星导航系统采用了MEO, GEO以及IGSO三种轨道, 分布有35颗导航卫星, 因此在高轨环境的可见性方面具有优势。 相比之下, 由于GLONASS的轨道倾
角较大, 对于GEO这类轨道倾角为0°的航天器运行环境, 导航卫星的可观测能力较差, 图中显示, 在GEO航天器运行周期内始终无法观测到4颗GLONASS导航卫星。
根据图5及上述分析可知, 采用单个独立的卫星导航系统难以满足全维导航的最低可见星数要求, 因此, 为了实现GEO航天器的全时空自主导航, 需要搭载多模GNSS接收机。
图6所示为GEO航天器运行周期时间内, 接收所有GNSS卫星导航系统信号的可见星数变化曲线。 图中显示, 采用全GNSS星座能够显著改善GEO环境的导航卫星可见性, 整个运行周期内至少能够观测到1颗导航卫星, 最佳状态为10颗可见星, 平均可见星数为4.47颗, 大于4颗的最低要求。 图7表示可见星数的统计结果, 从图中可以看出, 采用全GNSS星座时, 可观测导航卫星不少于4颗的概率约为63.74%, 而观测到1颗卫星的概率仅为4.51%, 能够满足GNSS连续导航定位的要求。
(当HEO航天器运行高度超过导航卫星轨道高度时)中, GNSS四大卫星导航系统的可见性分析。 图中显示, 当航天器处于HEO环境中时, 所有GNSS卫星导航系统的可见性均较差, 运行周期内可观测导航卫星难以达到4颗的最低要求。
进一步分析采用全GNSS卫星导航系统得到的可见星数随HEO航天器运行时间的变化情况, 其结果如图9所示。 可以看出, 当航天器处于HEO短半轴顶点附近(如图中圈内部分)时, GNSS可见星数突然衰减至0颗, 且持续时间超过700 s, 因此航天器在HEO短半轴顶点不适宜做轨道机动, 极易导致GNSS跟踪环路失锁。 HEO环境中可见星数统计结果如图10所示, 平均可见星数为4.51颗, 超过4颗导航卫星的最低容限, 其中72.42%的时间内能够接收不少于4颗导航卫星的
信号, 7.54%时间内仅能观测0或1颗导航卫星, 基本满足GNSS连续导航要求。
同时, 为了解决HEO短半轴顶点附近无可见星、 GEO短时可见星非常少等GNSS间隙性失效的问题, 可以考虑通过引入外部信息对高轨航天器搭载GNSS接收机进行辅助, 例如配置体积较小的捷联惯导系统辅助GNSS接收机环路, 以满足高轨航天器GNSS导航的连续性。 采用0.05 (°)/h的陀螺仪零漂误差以及10-4g的加速度计零偏误差, 得到700 s惯性导航系统解算位置/速度误差分别如图11~12所示。 从图中可以看出, 中等精度的惯性器件经过700 s的漂移后, 位置和速度误差仍能满足航天器导航精度的要求, 因此具有解决GNSS短时失效时无法提供导航输出问题的能力。
2.2轨道倾角影响分析
由于不同GNSS星座采用的轨道倾角不同, 因此, 对于不同轨道倾角的高轨航天器来说可见性将
有所差异。 分析轨道倾角对高轨环境中GNSS可见性的影响, 有利于高轨航天器轨道倾角的优化设计。 分别模拟轨道倾角为0°, 30°, 60°和80°, 运行周期为19小时6分29秒的高轨航天器运行环境, 对GNSS四大卫星导航系统进行可见性分析, 得到不同轨道倾角环境中, 高轨航天器运行周期内可见性统计结果如图13~16所示。
分析GPS星座, 对比图13~16可以看出, 随着高轨航天器的轨道倾角由0°上升至60°, 可见星
数为0颗的概率明显减少, 可见星数为1, 2, 3颗的概率均有所上升, 表明可见性有所改善, 但始终无法观测到4颗GPS导航卫星; 进一步当高轨航天器轨道倾角上升至80°时, 可见星数为0颗的概率由9.8%大幅上升至34%, 同时可观测1, 2, 3颗导航卫星的概率均有10%的下降, 导致GPS导航卫星可见性受到了严重影响。 其原因在于: GPS星座采用倾角为55°的轨道平面, 因此, 当高轨航天器的轨道倾角接近55°时, 导航卫星可见性最好, 轨道倾角越偏离55°, 其可见性越差。
分析BDS星座, 根据图13可知, 在所有GNSS系统中, 当高轨航天器轨道倾角为0°时, 0颗可观测导航卫星的概率最低, 仅为23%。 低倾角高轨环境中, BDS可见性较优的主要原因是: BDS采用了GEO导航卫星, 有利于提高低倾角航天器对导航卫星的观测。 进一步对比图13~16可以看出, 高轨航天器越接近55°, 可见星数为0颗的概率越小, 其原因与GPS星座类似; 不同的是, 可以观测2~3颗导航卫星的概率并没有明显变化, 这是由于BDS导航卫星总数为35颗, 为所有GNSS卫星导航系统中最多, 导航卫星数量的优势能够显著提高了高轨环境中的可见性。
GLONASS星座所采用的轨道倾角最大(64.8°), 因此在低倾角与极高倾角环境中均没有显著优势。 Galileo星座的轨道倾角为56°, 与GPS星座类似, 但是采用3个轨道平面, 每个轨道均匀分布9颗星的模式, 导航卫星分布的均匀性使得Galileo系统有效覆盖能力超过GPS, 同时其导航卫星数量多于GPS而少于BDS星座, 因此在相同轨道倾角的高轨环境中, Galileo系统可见性优于GPS而差于BDS。
采用全GNSS星座获得的可见星数概率统计结果见表2。 从表中可知, 当高轨航天器轨道倾角越接近60°, 可見星数大于4颗的概率越大, 同时可见星数为0, 1, 2, 3颗的概率越小, 符合以上的分析结果。 因此为了保证高轨环境中足够的可观测导航卫星数, 在设计高轨航天器轨道时, 可以适当采用接近60°的轨道倾角。
2.3轨道高度影响分析
由于GNSS卫星下视天线的发射夹角限制以及地球遮挡因素, 使得高轨环境中可用主瓣服务区较小, 并且有效主瓣服务区范围与高轨航天器
的轨道高度密切相关, 因此利用相关统计方法, 分析不同轨道高度环境中GNSS的可见性, 能够为高轨航天器轨道高度的设计提供数据支撑。
分别仿真模拟轨道高度为2.5×107 m, 3×107 m, 3.5×107 m和4×107 m的航天器轨道(轨道倾角0°, 离心率0), 结合GNSS四大系统星座数据, 得到四大卫星导航系统的可见性统计结果如图17~20所示。 从图中可以看出, 随着航天器轨道高度的上升, 所有卫星导航系统的可见性均有变差的趋势, 其原因在于: 根据图4所示, 虽然当航天器轨道高度越高时(距离导航卫星越远), 有效主瓣服务区范围变大, 但是轨道高度的升高同时导致了航天器运行区域及周期的大幅提升, 因此, GNSS可见性的时间分布概率总体呈下降趋势。
GPS和GLONASS两种系统所采用的轨道高度较为接近, 约为20 000 km, 低于仿真模拟的高轨航天器轨道高度, 因此, 当航天器轨道高度不断上升时, 可见性随之变差。
相比之下, 由于Galileo和BDS星座采用的軌道高度较高, 因此轨道高度的变化对Galileo和BDS的影响较大。 图17中, 可观测星数为4颗时, Galileo系统所得概率仅为2%, 其原因为当前航天器轨道高度与Galileo星座轨道高度非常接近, 此时的可见性是最差的, 而当航天器轨道高度上升至30 000 km和35 000 km时, Galileo系统可见性为4颗的概率迅速提升至10%(如图18~19所示), 航天器轨道高度进一步上升至40 000 km, Galileo系统可见性也急剧下降。 对比图17~20也可以发现, BDS的可见性随轨道高度下降趋势也非常明显, 可见性为4颗的概率由48%骤减为4%。
进一步统计全GNSS可见星数, 得到不同可见星数的概率统计结果如表3所示。 从表中可以看出, 由于轨道高度对所有GNSS星座均产生了不利的影响, 因此随着轨道高度的提高, GNSS可见性不断下降, 可观测星数小于4颗的概率显著增加, 而大于7颗的概率大幅减少。 然而, 全GNSS星座包含超过100颗的导航卫星, 覆盖范围以及覆盖强度非常可观, 各GNSS系统星座间能够形成优势互补, 因此轨道高度升高时, 可观测星数为4或5颗的概率有所增大, 6或7颗的概率基本稳定。
3高轨环境GNSS几何精度因子分析
3.1高轨环境位置精度因子模型分析
在高轨环境中, GNSS可见性变差, 并且航天器与导航卫星间的距离是导航卫星间距离的数倍, 从而导致GNSS的几何精度因子激增。 由于几何精度因子是影响GNSS导航定位精度的主要因素, 因此分别分析GEO和HEO环境中GNSS的位置精度因子(Position Dilution Of Precision, PDOP)。
在利用GNSS观测量进行导航定位授时的解算过程中, 当前观测历元的视线方向决定了观测量中误差传递至解算误差的比例, 若视线方向矩阵记为
式中: Dii表示D对角线上第i个元素。
矩阵H和D完全取决于可观测星数以及相对于航天器的几何分布, D中元素越小, 则测量误差被放大成定位误差的程度越低。 理论证明, 当航天器与导航卫星的分布越接近于正四面体, 其PDOP值越小, 即当航天器与任意两颗可观测导航卫星的视线夹角(如图21中α, β所示)为60°时, PDOP最小。 若航天器接近于地球表面, 则航天器与导航卫星较易形成接近于正四面体的棱锥, 即β约为60°, 但是当航天器位于高轨中, 利用余弦定理可知α将小于29°, 无法达到60°的最优指标。
由于高轨环境的限制, 无法改变导航卫星的几何分布, 因此, 考虑通过改善权系数矩阵的方式来降低PDOP值。
GNSS载波相位时间差分是通过对相邻历元获得的载波相位测量值的差分运算, 得到无整周模糊度的历元间单差观测量, 改变载波相位测量方程中的视线方向矩阵, 从而实现对权系数矩阵的优化。
根据载波相位观测模型, 对于第j颗导航卫星, tk历元的载波相位单差观测量可表示为
式中: λ表示载波波长; Rj(tk)为tk历元航天器到第j颗导航卫星的几何距离; c为光速; δtr为接收机时钟误差; υ包括接收机热噪声、 多径误差等其他测量误差。
采用载波相位单差观测量对航天器导航参数进行解算时, 对应的视线方向矩阵H将发生变化, 新的视线方向矩阵可以表示为
当航天器接近地球表面时, 由于观测时间间隔较短, 航天器与导航卫星相邻历元间的位置变化极小, 因此利用载波相位时间差分算法将导致H中的元素均较小, 且行与行间产生相关性, 从而使得D的秩小于4, 此时PDOP值将趋于无穷大。 但是, 当航天器处于高轨环境中时, 相邻历元间航天器的位置变化较大, 从而H中元素值较大, 且相关性较弱, 有利于PDOP值的减小, 因此, 高轨环境中采用载波相位时间差分算法能够有效降低PDOP, 提高GNSS解算精度。
3.2GEO位置精度因子分析
以100为PDOP的计算上限, 得到GEO环境下的PDOP如图22所示, 其中实线表示采用非差GNSS算法得到的PDOP变化曲线, 十字线为采用载波相位时间差分GNSS算法得到的PDOP变化曲线, 灰线为当前GNSS可观测星数。 从图中可以看出, 由于航天器的轨道高度远高于GNSS星座, 非差GNSS的PDOP非常大, 尤其当可观测星数小于6颗时, 均超出了100的计算上限, 无法满足高精度定位的要求; 相比之下, 采用载波相位时间差分GNSS得到的PDOP明显小于非差GNSS, 且受可见星数的影响较小, 虽然载波相位时间差分GNSS并未改变GNSS可见星的几何分布, 但是通过对载波相位观测量的时间差分改变了可见星的
视线方向矩阵, 从而大幅改善PDOP, 获得更高的定位精度。
分别对非差/差分PDOP数据进行概率统计, 得到其统计结果如表4所示, 从表中可知, 99.90%的非差PDOP超出了30, 难以实现GEO
环境中的高精度GNSS导航定位, 而采用载波相位时间差分能够显著降低PDOP, PDOP超出30的概率下降为39.03%, 同时又近50%的PDOP小于10, 能够大幅提高GEO环境中GNSS的解算精度。
3.3HEO位置精度因子分析
针对HEO环境, 分析非差与载波相位时间差分GNSS算法PDOP随可见星数的变化趋势, 其结果如图23所示。 图中显示, 在HEO航天器初始
和末尾阶段, 其轨道高度仍低于GNSS星座, 因此非差与载波相位时间差分GNSS得到的PDOP均较小; 随着HEO航天器轨道高度的增大, 非差PDOP
瞬间上升至100以上, 相比之下, 差分PDOP虽有增大, 但大部分仍保持在50以下, 有利于GNSS的高精度解算。
根据以上分析可见, 高轨环境中采用非差GNSS算法得到的PDOP值非常大, 难以满足航天器的导航精度要求。 而采用載波相位时间差分算法后, 能够大幅减小PDOP值, 从而降低由GNSS测量误差导致的导航定位误差, 实现高轨航天器的高精度实时导航解算。
4结论
基于高轨航天器(GEO及HEO)的模拟运行数据, 结合GNSS四大系统的星座模型, 分析了高轨环境下轨道倾角及轨道高度对GNSS可见性的影响, 对比了采用非差GNSS算法和载波相位时间差分算法获得的几何精度因子变化情况, 通过研究, 可以得到如下结论:
(1) 高轨环境中, 采用全GNSS星座能够大幅改善导航卫星的可见性, 但是在部分时间段内可见性仍较差, 可在航天器导航系统中增加惯性导航系统, 以实现导航输出的无缝衔接。
(2) 由于GNSS星座的轨道平面倾角主要集中在60°附近, 因此当高轨航天器轨道倾角接近60°时, GNSS可见性较优, 故在设计高轨航天器轨道参数时, 宜采用接近60°的轨道倾角。
(3) 当航天器轨道高度超出GNSS星座时, 随着轨道高度上升, GNSS可观测星数不断衰减, 相比之下, 由于Galileo星座设计轨道高度最高, 其可见性在极高轨区域具有一定的优势, 因此, 高轨航天器所搭载的GNSS接收机应加强对Galileo信号的处理灵敏度。
(4) 在高轨环境中, 仅采用非差GNSS算法难以获得较小的PDOP值, 严重影响了GNSS的导航定位精度, 在设计适用于高轨航天器的高灵敏度接收机时, 更适宜采用载波相位时间差分算法。
参考文献:
[1] Lorga J F M, Silva P F, Dovis F, et al. Autonomous Orbit Determination for Future GEO and HEO Missions[C]∥5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), 2010: 1-14.
[2] 闻长远, 岳富占, 仇跃华. 高轨GPS信号可用性分析[J]. 电子设计工程, 2014, 22(2): 29-33.
Wen Changyuan, Yue Fuzhan, Qiu Yuehua. Analysis of High Altitude GPS Signal Availability[J]. Electronic Design Engineering, 2014, 22(2): 29-33. (in Chinese)
[3] Filippi H, Gottzein E, Kuehl C, et al. Feasibility of GNSS Receivers for Satellite Navigation in GEO and Higher Altitudes[C]∥5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), 2010: 1-8.
[4] Dion A, Calmettes V, Bousquet M, et al. Performances of a GNSS Receiver for SpaceBased Applications[Z]. Toulouse Space Show, 2010.
[5] 刘志平, 唐旭, 张秋昭. GNSS卫星可见性及可用性的概率特征[J]. 测绘科学, 2015, 40(12): 101-107.
Liu Zhiping, Tang Xu, Zhang Qiuzhao. Probability Statistics of GNSS Satellites Visibility and Availability[J]. Science Surveying and Mapping, 2015, 40(12): 101-107. (in Chinese)
[6] 于清德, 吴雨航, 陈秀万, 等. GNSS 几何性能仿真分析[J]. 计算机仿真, 2010, 27(6): 87-92.
Yu Qingde, Wu Yuhang, Chen Xiuwan, et al. Simulation Analysis of GNSS Geometric Performance[J]. Computer Simulation, 2010, 27 (6): 87-92. (in Chinese)
[7] 丛丽, Ahmedia I A, 谈展中. 卫星导航几何因子的分析和仿真[J]. 电子学报, 2006, 34(12): 2204-2208.
Cong Li, Ahmed I A, Tan Zhanzhong. Analysis and Simulation of the GDOP of Satellite Navigation[J]. Acta Electronica Sinica, 2006, 34(12): 2204-2208. (in Chinese)
[8] 向才炳, 邊少锋, 吴泽民. GPS/BDS空间可见性与GDOP分析[J]. 海洋测绘, 2013, 33(6) : 33-35.
Xiang Caibing, Bian Shaofeng, Wu Zemin. Space Visibility and GDOP Analysis of GPS/BDS[J]. Hydrographic Surveying and Charting, 2013, 33(6): 33-35. (in Chinese)
[9] 吴振钿, 吴发林, 付勇, 等. GPS 间歇性失效环境下的低成本多传感器组合导航系统研究[J]. 航空兵器, 2015 (3): 13-17.
Wu Zhendian, Wu Falin, Fu Yong, et al. Research on LowCost MultiSensor Integrated Navigation System in Intermittent GPSDenied Environment[J]. Aero Weaponry, 2015(3): 13-17. (in Chinese)
[10] Sharp I, Yu K, Guo Y J. GDOP Analysis for Positioning System Design[J]. IEEE Transactions on Vehicular Technology, 2009, 58(7): 3371-3382.
[11] 廖春招. GPS卫星坐标计算及几何精度因子[J]. 矿山测量, 2011(4): 29-31.
Liao Chunzhao. Computation of GPS Position and DOP[J]. Mine Surveying, 2011(4): 29-31. (in Chinese)
[12] 刘伟洲, 伍吉仓. GPS/北斗组合导航系统卫星可见性和DOP值分析[C]∥ 第三届中国卫星导航学术年会电子文集——S06北斗/GNSS测试评估技术, 2012.
Liu Weizhou, Wu Jicang. The Analysis of Satellite Visibility and DOP Value of GPS and Compass Navigation Systems[C]∥The 3rd China Satellite Navigation Conference—S06 BD/GNSS Measuring and Evaluation Techniques, 2012. (in Chinese)
[13] 鲁晓莹, 杨树兴. 制导武器 GPS/GLONASS 导航的探讨与研究[J]. 航空兵器, 2003 (1): 6-8.
Lu Xiaoying, Yang Shuxing. Research of the Guided Weapon GPS/GLONASS Navigation[J]. Aero Weaponry, 2003 (1): 6-8. (in Chinese)
[14] 王泽民, 孟泱, 伍岳,等. GPS、 Galileo及其组合系统导航定位的DOP值分析[J]. 武汉大学学报: 信息科学版, 2006, 31(1): 9-11.
Wang Zemin, Meng Yang, Wu Yue, et al. DOP for GPS, Galileo and Combination Navigation System[J]. Geomatics and Information Science of Wuhan University, 2006, 31(1): 9-11. (in Chinese).
[15] 俞朔春, 高益军. 基于GPS的高轨道卫星自主定轨技术可行性分析研究[J]. 控制工程, 2006(1): 38-42.
Yu Shuochun, Gao Yijun. Analysis of HighOrbit Satellite Autonomous Navigation Based on GPS[J]. Control Engineering, 2006(1): 38-42. (in Chinese)
