
基于双足负载机器人的大功率舵机的设计
2017-03-27 10:25王晓枫华云松
电子科技 2017年3期
王晓枫,华云松
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于双足负载机器人的大功率舵机的设计
王晓枫,华云松
(上海理工大学 光电信息与计算机工程学院,上海 200093)
研究设计了一种应用于双足负载机器人的功率较大的小型舵机系统,相较于常规电动舵机,具有功率密度高和承载能力强等特点。该舵机系统以IRF530作为开关元件、IR2110作为栅极驱动芯片,通过功率放大电路实现对直流电机的驱动,然后经由反馈模块,控制舵面的偏转角度并调节回路电流,从而构成一个闭合反馈的舵机系统。通过多次实验分析,验证了本次设计的基于双足负载机器人的小型化大功率舵机系统的合理性与正确性。
舵机;闭合反馈系统;双足负载机器人
舵机系统作为一种高精度、高响应速度的位置伺服系统,通过接受主控系统给定的舵面偏转信号,从而操纵舵面的偏转角度,是机电控制系统的重要执行机构[1]。且电动舵机以其能源单一、结构简单、工艺性好、可靠性高,使用维护性方便,成本低廉等优点在航天、船舶、机器人等领域备受人们关注[2]。在航天方面,舵机是飞行器制导控制系统的执行机构,其飞行姿态变换的俯仰、偏航、滚转运动都是靠舵机相互配合完成的,因此舵机的性能直接影响飞行过程中的动态品质[3]。在船舶方面,舵机是一种大甲板机械,具有保持或改变行向的作用。船用舵机目前多用电液式,即液压设备由电动设备进行遥控操作[4]。
上述系统中的舵机都属于大型的大功率电动舵机,而本文研究的舵机是针对双足负载机器人系统而言。舵机作为主要执行机构,其控制效果是影响双足负载机器人系统性能的重要因素[5]。常见的小型舵机一般功率较小,对于双足负载机器人系统而言,这类舵机的显然无法实现其多关节协调的运动控制[6-7]。针对这一情况,本文研究并设计一种完整的小型化、大功率电动舵机系统。
1 舵机系统总体结构的设计
舵机作为一种位置伺服的驱动器,是双足机器人系统的主要执行机构[8]。本次设计中,舵机系统采用闭环反馈的控制方式,由图1可见,具体组成部分有:减速齿轮组、电位计、电流传感器、电机、控制电路。
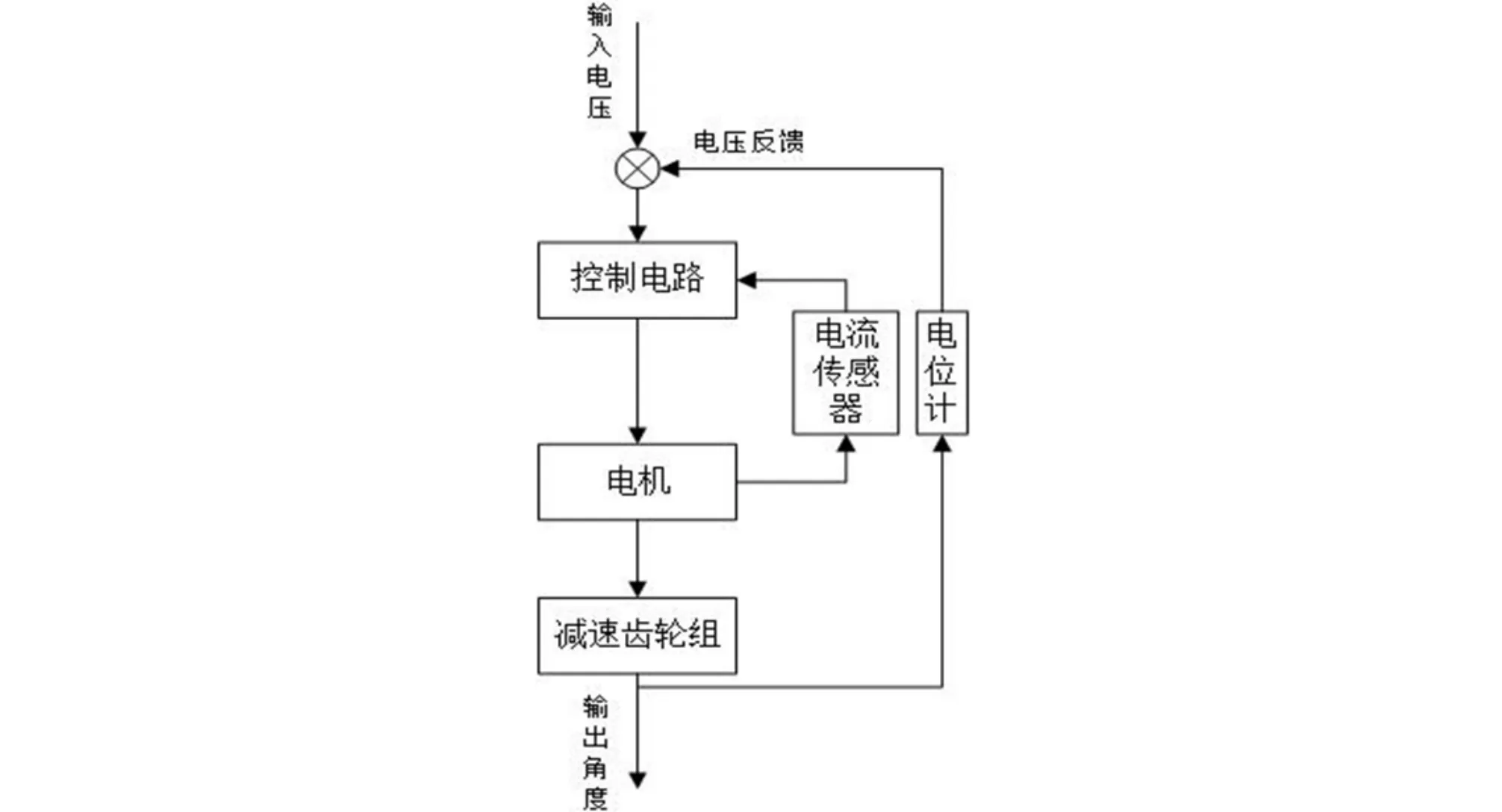
图1 舵机系统结构图
舵机系统工作原理:控制电路接收主控板的信号,驱动电机正反转,从而带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和电位计相连,舵盘转动的同时,带动电位计,电位计将输出一个电压反馈信号至回路,然后控制电路根据电位计反馈信号决定电机的偏转方向与角度,直到达到目标位置停止。同时,控制电路也根据电流传感器的反馈信号调节回路电流,起到了限流保护的作用。
2 控制电路的设计
2.1 H桥电机驱动电路设计
驱动直流电机的方式有多种,对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,但当电机需要双向转动时,可以使用由4个功率元件组成的H 桥电路[9]。本次设计中采用H桥实现对电机的驱动控制。
功率器件作为电机驱动电路必不可少的部分,其性能也影响着整个舵机系统的性能。如表1所示,即为各类型功率电力电子器件的主要技术特点[10]。
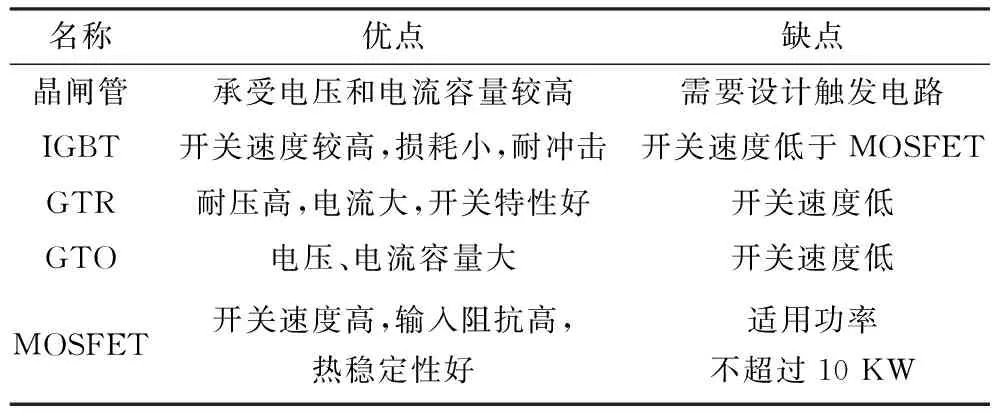
表1 各类功率电力电子器件比较
MOSFET管是电压控制型元件,具有输入阻抗大、开关速度快、无二次击穿等特点,在电机运转时可提供近似电源电压的电压,并结合表1 比较分析,本次设计中的H桥电机驱动电路选用MOSFET管作为开关元件,可达到较好的驱动效果。如图2所示,即为4片MOSFET构成的H桥电路。

图2 H桥电机驱动电路
在实际实验中,选用选用IR公司的N沟道增强型MOSFET管IRF530,其漏极电流为14 A,并可承受49 A的单脉冲电流,最大电压100 V,其导通电阻≤0.16 Ω,实现了驱动大功率电机的目的。
2.2 IR2110功率驱动电路的设计
为了驱动4片IRF530芯片,本次设计中选用了两片IR2110,同时外接少量的辅助器件可构成集成度高、体积小的H型功率驱动电路。如图3所示,即为单片IR2110驱动单桥臂IRF530的原理图。

图3 单片IR2110驱动单桥臂IRF530的原理图
其中C1、C3、C4均为各电源与地之间的电容,利用电容的储能防止电压有大的波动。C2为自举电容,Vcc经D1、C2、负载,Q2给C2充电,以确保在Q2关闭、Q1导通时,Q2管的栅极靠C2上足够的储能来驱动。自举电容的取值与PWM的频率相关,频率低时,选用大电容;频率高时,选用较小的电容。图中的D1是保护二极管,可防止Q1导通时高电压串入Vcc端损坏该驱动芯片。
3 电位计原理
本次设计中采用了电位计进行角度反馈。其与舵机的输出轴机械相连,将舵面偏转的变化转换为电阻值的变化,再通过测量电路把电阻值的变化转换成电压信号的输出,从而精确地反映了舵机输出轴的位置。其原理如图4所示。
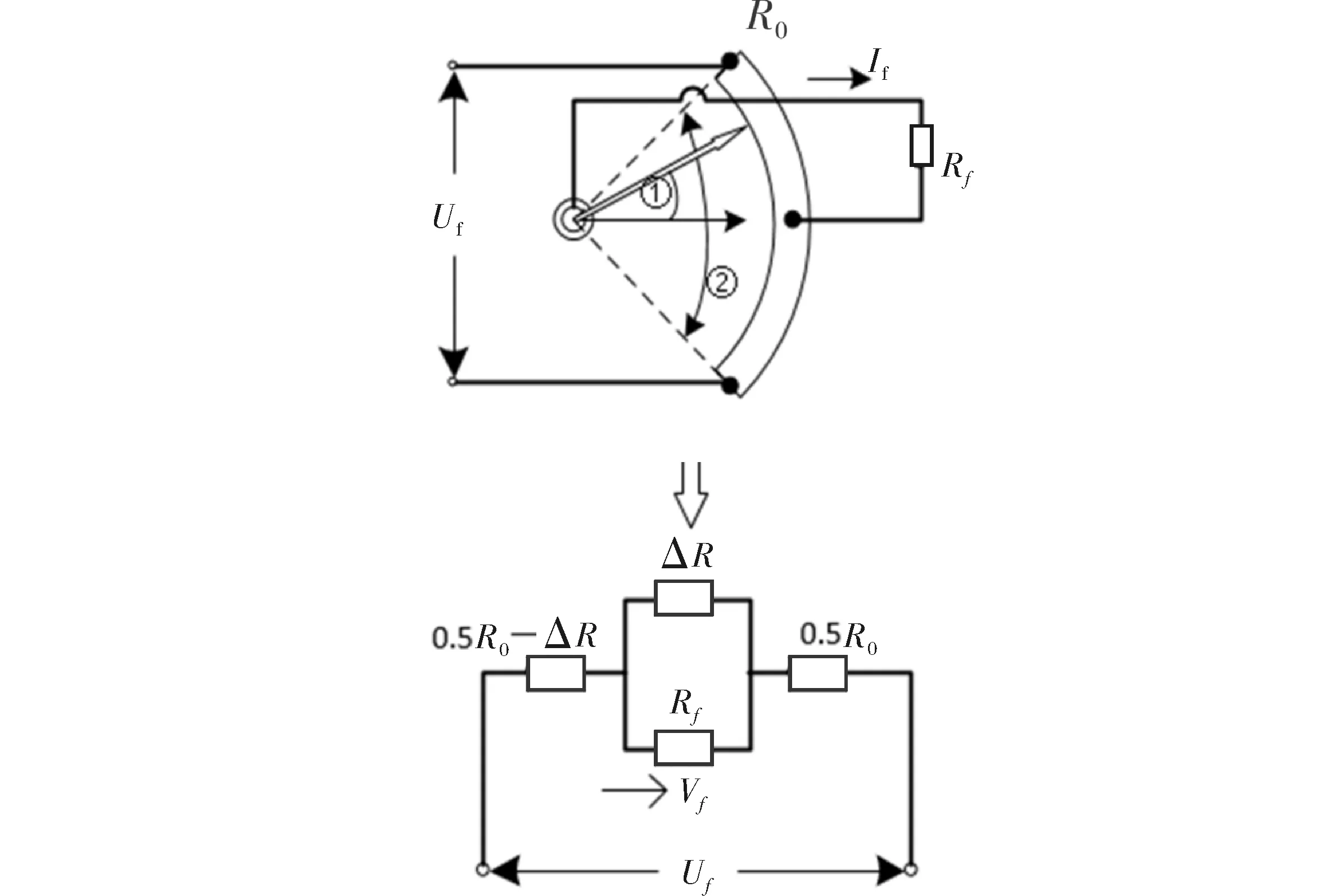
图4 电位计原理图与对应的等效电路
图中,R0为电位计电阻;①角即Δθ,Δθ为电刷自电位计中点O向任一方向偏转的角度;②角即θ0,θ0为电位计最大电气转角;Rf为负载电阻;If为负载电流。
由图可得
(1)
设电位计是线性的,电阻变化量
(2)
(3)
当传感器输出端阻抗较大时,Rf→∞,有如下线性关系
(4)
4 实验分析
4.1 机器人机构的建模仿真
机器人本体由座椅、大腿、小腿和脚组成,大小腿及脚腕可在垂直平面转动,脚掌可以水平翻转,其侧向和正向运动结构简图如图6所示[11-12]。
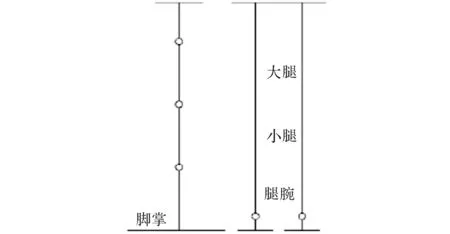
图6 机器人侧向和正向运动结构简图
根据机器人的结构图,在Solidworks中建立其三维模型[13],通过左右大腿杆件、左右小腿杆件、左右脚腕、左右脚掌等部件的配合,将8路舵机装配,构成完整的双足负载机器人系统,并建立运动算例,进行运动仿真,其仿真结构如图7所示[14-15]。

图7 运动姿态仿真图
在本次实验室,选择马达类型为旋转马达,通过设置运动速度,使双足行走负载机器人按照选取的方向进行仿真运动。
4.2 实验验证
使用8个小型大功率舵机和联结构件组合,构成双足负载机器人系统;选用STC12C5A60S2单片机和24路舵机驱动板共同驱动舵机。其部分程序如下:
PCON |= 0x80; //使能波特率倍速位
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x40; //定时器1时钟为Fosc,即1T
AUXR &= 0xfe; //串口1选择定时器1为波特率发生器
TMOD &= 0x0f; //清除定时器1模式位
TMOD |= 0x20; //设定定时器1为8位自动重装方式
TL1 = 0xFA; //设定定时初值
TH1 = 0xFA; //设定定时器重装值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
实验中,通过控制舵机舵面的转动驱动连杆,带动双足负载机器人做出各种指定动作,从而实现对其运动的控制。如图8所示,即为机器人在负载行走过程中的不同姿态。
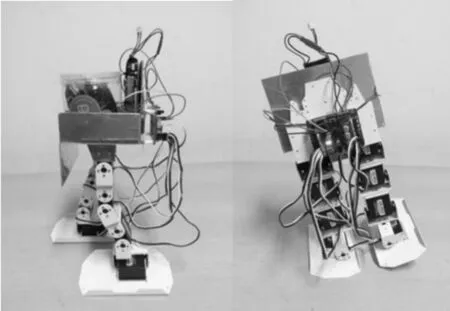
图8 实际运动姿态图
机器人在负载行走过程平滑稳定,与在Solidworks中仿真得到的行走动画动作同步,验证了本次设计的基于双足负载机器人的小型化大功率舵机系统的合理性与正确性。
5 结束语
本文主要设计了一种基于双足负载机器人的舵机系统。研究分析了该舵机系统的结构组成,结合实际工作需求,完成了舵机系统结构、控制电路及反馈模块的设计。该舵机系统具备体积较小、承载能力强等优点,经实验验证,实现了机器人的负载行走。
[1] 李华晋,刘鸣.机器人关节及转向装置——舵机的原理及应用[J].高校实验室工作研究, 2010(1):62-63.
[2] 贾萍,苏静.电动舵机系统建模与仿真[J].电子技术与软件工程,2015(15):80-82.
[3] 李跃忠.电动舵机的集成设计与控制[D]. 北京:北京交通大学,2006.
[4] 蒋辰飞,刘子龙,胡少凯,等.基于AVR单片机的多舵机控制精度的研究[J].信息技术, 2014(3):35-37.
[5] 任志敏.基于AVR单片机的舵机驱动电路研究[J].自动化技术与应用,2008(6):85-87.
[6] 陈诚.基于DSP的电动舵机控制系统的设计[D].镇江:江苏大学,2015.
[7] Tzafestas S G,Krikochoritis T E,Tzafestas C S. Robust sliding-mode control of nine-link biped robot walking[J].Journal of Intelligent & Robotic Systems,1997,20(2-4):375-402.
[8] 韩庆瑶,洪草根,朱晓光,等.基于AVR单片机的多舵机控制系统设计及仿真[J].计算机测量与控制,2011,19(2):332-334.
[9] 游志宇,杜杨,张洪,等.基于场效应管的直流电机驱动控制电路设计[J].电子设计工程,2008(2):3-6.
[10] 余晓填,杨曦,陈安,等.基于移动机器人直流电机驱动电路的设计与应用[J].微电机,2011,44(11):37-40.
[11] 张伟,杜继宏.双足步行机器人的步态规划[J].计算机工程与应用,2002, 38(13):214-216.
[12] 李元宗,王跃国.双足步行机器人动态直线步行运动的规划[J].机器人,1992(6):34-39.
[13] Aoi S,Tsuchiya K.Locomotion control of a biped robot using nonlinear oscillators[J].Autonomous Robots,2005,19(3):219-232.
[14] 廖绍辉.双足机器人几何建模及运动规划的研究[D].大连:大连交通大学,2008.
[15] ROBO-ONE委员会.双足步行机器人仿真设计[M].杨洋,杨斯爽,译.北京:科学出版社,2013.
Design of High Power Steering Gear Based on Loaded Biped Robot
WANG Xiaofeng,HUA Yunsong
(School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
This paper studies and designs a kind of small steering gear system which is applied to the loaded biped robot.Compared with conventional electric actuator, it has the characteristics of high power density and high load carrying capacity.In this servo system,using IRF530 as a switching element and IR2110 as the gate driver chip,the DC motor would be driven by power drive circuit.In addition,the deflection angle of the rudder surface and the current of the circuit would be controlled through the feedback module.Therefore, a closed feedback steering gear control system is produced.Finally, the rationality and correctness of the miniaturized high power steering system based on the loaded biped robot will be verified by many experiments.
steering gear; closed feedback system; loaded biped robot
2016- 05- 15
王晓枫(1992-),女,硕士研究生。研究方向:仪器科学与技术。
10.16180/j.cnki.issn1007-7820.2017.03.047
TP271+.9
A
1007-7820(2017)03-170-04
猜你喜欢
电子制作(2019年16期)2019-09-27
汽车维护与修理(2019年3期)2019-08-08
自动化学报(2019年6期)2019-07-23
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年3期)2017-11-23
汽车维护与修理(2017年5期)2017-11-17
制造业自动化(2017年2期)2017-03-20
火控雷达技术(2016年1期)2016-02-06
