
基于PAC5223无刷直流电机控制系统设计
2017-03-27 10:25张慧萍
电子科技 2017年3期
张慧萍
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于PAC5223无刷直流电机控制系统设计
张慧萍
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对传统无刷直流电机控制系统集成度低、精度低、调速性能差的问题,设计了一种基于Active-semi PAC5223无刷直流电机控制系统。该控制器集成了一个50 MHz运行速度的ARM Cortex-M0 32位微控制器核心、Active-semi专有和专利申请中的多模式电源管理模块、可配置的模拟前端及特殊应用功率驱动。通过软件实现电流和速度双闭环PI控制。实践证明,该控制系统简化了外围硬件电路,且具有良好的动态性能和控制精度。
无刷直流电机;PAC5223;双闭环控制;PI调节
无刷直流电机是新一代机电一体化产品,利用电子换相代替机械换相,凭借其结构简单、运行效率高、维护方便的优点受到越来越多的关注[1-2]。随着新型电力电子功率器件的不断出现和微控制器高度集成化,许多复杂而有效控制策略和算法在各种电机控制中已实现,且越来越多地应用于家电、汽车和工业控制系统[3-6]。此外,采用开关功率原件进行脉冲调制也已成为主流[7]。因此有必要针对无刷直流电机的控制策略进行系统研究,以寻找一种高效而简化的控制系统,改善无刷直流电机的运行性能[8]。
1 无刷直流电机控制系统结构介绍
该控制系统通过串口与上位机进行通信,以PAC5223芯片作为主控制器,采用PWM方式控制三相电桥,硬件过零点判断,定时器实现延时换相,速度实时计算,实时调节达到上位机速度实现速度环PI调节[9],母线有个可配置差分放大器采集电流与速度环输出进行电流环PI调节,实现双闭环控制[10]。高度集成化的PAC5223,使整个无刷直流电机控制系统变得精简而高效,系统架构如图1所示。

图1 系统架构
2 无刷直流电机控制系统硬件设计
2.1 主控IC
该系统的主控制器是PAC5223芯片,如图2所示,主频50 MHz,具有高达32 kB的嵌入式闪存,一个10位1 μs的高速模数转换器(ADC带有两条自动采样序列),可配置I/Os,灵活的时钟源、定时器、多功能14通道的PWM引擎。多模式电源管理器(MMPM)[11]提供了适用于多种电源模式的高效电源管理“单芯片”解决方案。其具有一个可配置的多模式开关电源控制器(能够工作在降压、反激或升压模式下)和4个线性稳压电源。针对应用定制的功率驱动器(ASPD)包含开漏输出驱动,适用于包括半桥、H桥、3相、智能功率模块(IPM)以及通用驱动所设计的功率驱动器。可配置的模拟前端(CAFE)包括差分可编程增益放大器和单端可编程增益放大器,通过软件设置可实现多种功能,包括信号采样、放大、反馈和监控。
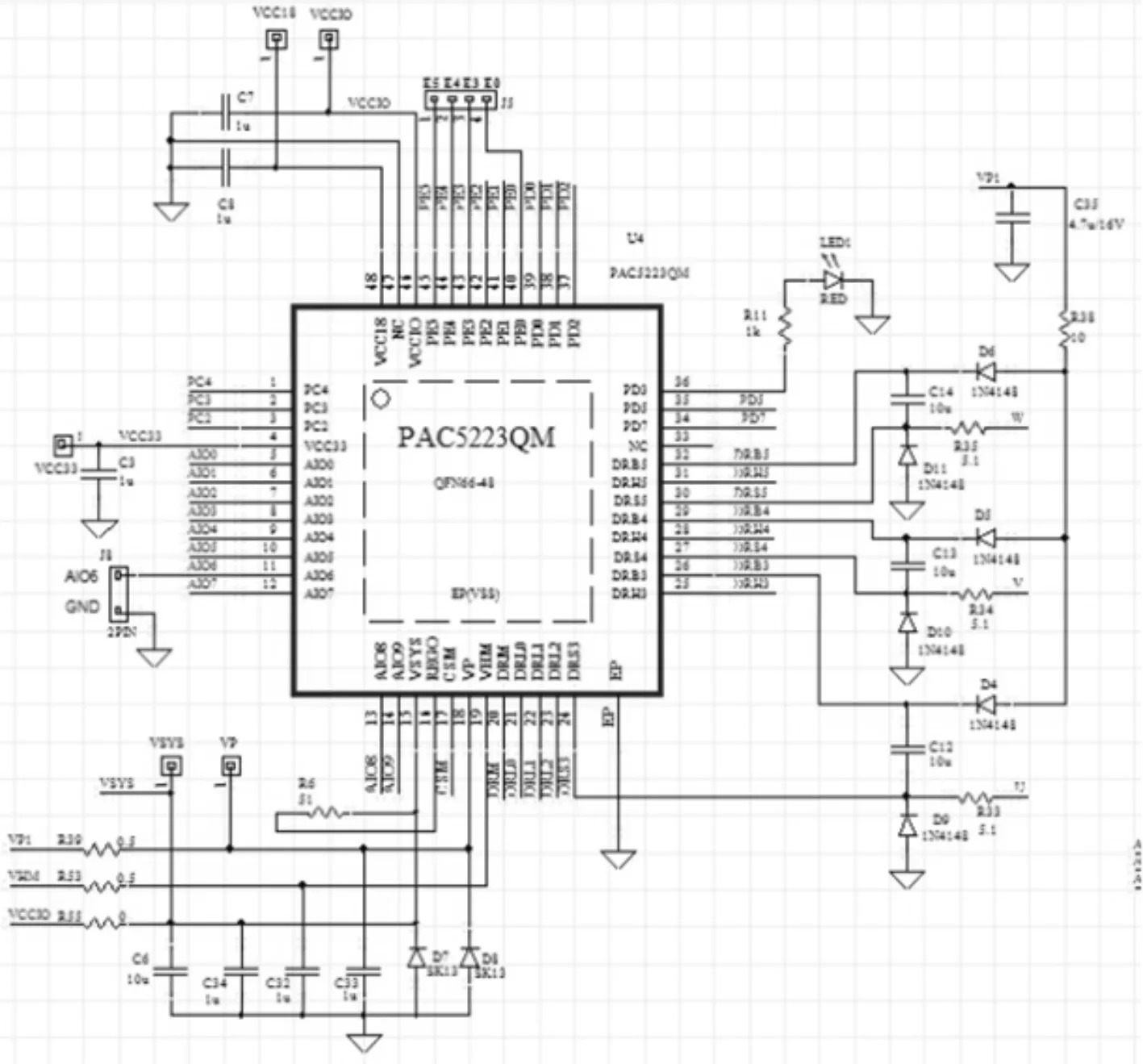
图2 PAC5223芯片原理图
2.2 电源供给
24 V DC输入给PAC5223的电源管理引脚VHM供电,之后DRM产生50 kHz PWM信号(频率可寄存器配置)来驱动反激式开关电源MOS管,得到VP1(电压可寄存器配置为5 V/9 V12 V/15 V)电压。同时,VP1作为feedback形成闭环,使VP1输出电压稳定。PAC5223由VP1供电后可通过内部LDO电路得到VSYS(5 V)、VCCIO(5 V)、VCC33(3.3 V) 、VCC18(1.8 V),无需专门的BUCK电路,给芯片供电,简化了电源电路,电源供给如图3所示。

图3 电源供给
2.3 驱动和采样电路
PAC5223内部集成驱动,不用专门的驱动电路,所以三相全桥[12],如图4所示的IGBT可由PAC5223的DXH5、DXH4、DXH3、DRL0、DRL1、DRL2直接驱动,上桥臂采用PWM控制输出,下桥臂为基本输出、配置硬件死区时间,从而来驱动三相全桥。这里用了两个20 Ω电阻并联产生10 Ω电阻进行母线电流采样,一方面用来做过流保护,当母线电流异常时(超过预设值),会立刻关断驱动以免造成电路的损坏,另一方面作为电流环采样,进行电流环调节,达到闭环控制。

图4 三相全桥
2.4 过零点检测
过零点检测[13]电路是将PAC5223的AIO7、AIO8、AIO9配置为特殊比较器模式, 相电压需通过分压电阻网络得到在电压比较器同相输入端额定电压范围内电压(0~2.5 V )。配置相应比较器被选中,才会读取比较器输出结果,另外两个比较器将被忽略,星型连接的电阻(100 kΩ)集成在PAC中,中心点可通过寄存器配置连接到比较器的反向输入端,当发生过零点时一个比较器的输出会发生反转,以此判断过零点发生,延时30°换相。
当在换相时,会突然关断开关管,由于电感上电流不能突变,若突然使某一半桥臂上下管均断开,此时此桥臂对应的电机绕组上的电流需要续流回路减小电流,在检测过零点时,需要避过去磁事件。电机绕组电流越大,需要放电时间越长。因此,在程序控制流程中,需要一段Blanking 时间,跳过这段时间,此段时间内不去监测过零点,以免造成过零点混乱,导致电机换相异常。
3 无刷直流电机控制系统软件设计
3.1 软件基本架构
初始化外设资源,等待各个中断发生,当ADC中断发生时,进行控制状态机的切换,确定电机运行的状态,在相应状态处理电机控制。用20 kHz频率的TimeA采样过零点比较器结果,定时器已做blanking time,去除换相时电感续流干扰。当检测到过零点结果发生跳变,启动TimeD,并配置TimeD,延时30°,当TimeD中断发生,进行电机换相,以此达到整个电机控制,流程如图5所示。

图5 程序流程图
3.2 速度外环和电流内环双闭环控制
该系统用软件实现速度外环和电流内环双闭环控制[14],电流环和速度换均采用位置型PI。PI调节器是一种线性调节器[15],本系统速度外环,其将给定速度与实际定时器计算出来的速度的偏差的比例(P)、积分(I)通过线性组合构成控制量,对速度进行控制,在电流内环,同样如此作用。比例,即时成比例地反应控制系统的偏差信号,偏差一旦产生,调节器立即产生控制作用以减小偏差,积分主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数,时间越大,积分作用越弱,反之则越强。
4 系统实际运行
为了验证该系统设计方案的可行性,根据上述硬件、软件设计进行无刷直流电机控制实验。该系统运行在coocox开发环境,C编程,程序通过coolink下载到芯片,通过电脑上位机串口通信进行控制,实现双闭环PI调节。
启动,由示波器波形,如图6所示,在启动阶段开V相上管和U相下管来实现转子预定位,接着开V相上管和W相下管,依次六步强拉电机转子转动,实现开环拖动电机,开环会有加速过程,达到一定速度(由于不同电机的反电动势系数不同,该点速度会不同),会利用硬件比较器结果进行换相,而不是按固定六步强拉来换相,每当比较器结果发生跳变,延时30°,换相,接着进入闭环控制。

图6 启动阶段波形图(CH1 U相电压 CH2 V相电压CH3 W相电压 CH4 U相电流)
进入闭环,示波器波形如图7所示,定时器计算的速度会与上位机进行比较,速度环PI调节,输出到电流环,与母线采样回来的电流进行比较,电流环调节,然后控制PWM占空比,达到整个无刷直流系统双闭环响应并快速达到稳定速度。

图7 恒速波形图(CH1 U相电压 CH2 V相电压 CH3 W相电压 CH4 U相电流)
5 结束语
基于Active-semi PAC5223无刷直流电机控制系统,由于PAC5223的电源管理和驱动模块的集成,大幅减少了外围硬件电路;采用硬件过零点检测,只需判断过零点结果寄存器的跳变,来判断是否检测到过零点,简化了程序架构;并采用软件双闭环控制,实验证明了该无刷直流电机控制系统,在启动阶段,阶跃响应和动态稳定上都具有优异的性能。
[1] 孟庆斌,马斌,王长涛,等.基于 MC9S12X128无刷直流电机控制系统设计[J].电子科技,2012,25(1):56-60.
[2] 张博,朱宇军,和征.三相无刷直流伺服电机控制系统的研究[J].电子科技,2008,21(9):67-69.
[3] 夏长亮,方红伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):25-34.
[4] Sierra S A R,Carballido J F M, Gonzalez J L V. Switching techniques for brushless DC motors[C].International Conference on Electronics, Communications and Computing (CONIELECOMP),IEEE, 2013.
[5] Cui C,Liu G,Wang K.A novel drive method for high-speed brushless DC motor operating in a wide range[J].IEEE Transactions on Power Electronics,2015,30(9):4998-5008.
[6] 黎金锋,王鹏,王志新,等.电动汽车车用低压无刷直流电机控制系统设计[J].华东电力,2014,42(6):1138-1143.
[7] Paul A R,George M.Brushless DC motor control using digital PWM techniques[C]. International Conference on Signal Processing, Communication, Computing and Networking Technologies (ICSCCN),2011.
[8] 夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[9] Singh M,Garg A.Performance evaluation of BLDC motor with conventional PI and fuzzy speed controller[C].IEEE 5th India International Conference on Power Electronics (IICPE), IEEE,2012.
[10] 方炜,张辉,刘晓东.无刷直流电机双闭环控制系统的设计[J].电源学报, 2014(2):35-42.
[11] 陈东坡.便携式电子设备用高效率、多模式、多输出电源管理芯片的研究与设计[D].杭州:浙江大学,2008.
[12] 李伟东,唐万军,庞佑兵.一种低功耗三相无刷电机驱动控制器的设计[J].微电子学,2010,40(2):252-255.
[13] 李自成,程善美,蔡凯,等.反电动势过零检测无刷直流电机转子位置新方法[J].电工技术学报,2009,24(7):52-58.
[14] 谢志诚,李益华,林利红.无刷直流电机双闭环控制系统的建模与仿真[J].电机技术, 2010(2):26-30.
[15] 董恒,王辉,黄科元.永磁同步电动机驱动系统数字PI调节器参数设计[J].电气传动,2009,39(1):7-10.
Design of the Brushless DC Motor Control System Based on PAC5223
ZHANG Huiping
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology, Shanghai 200093, China)
A brushless DC(BLDC) motor control system which is based on Active-semi PAC5223 is designed in order to solve the problems of low level of integration, low precision, poor speed control performance of tradition BLDC motor control system. It integrates a ARM Cortex-M0 32-bit microcontroller core operating at 50 MHz,a multimodal power management module patented by Active-semi, a configurable analog front end and a special application power drive. By means of software, it realizes the double closed loop PI control of current and speed. It is demonstrated that this control system simplifies the peripheral hardware circuit and has a good dynamic performance and control precision.
brushless DC motor; PAC5223; the double closed loop control; PI regulation
2016- 04- 11
张慧萍(1992-),女,硕士研究生。研究方向:无刷直流电机及其控制。宋梁(1980-),男,博士,教授,博士生导师。研究方向:认知物联网。
10.16180/j.cnki.issn1007-7820.2017.03.027
TN721+.2;TM36+1
A
1007-7820(2017)03-098-04
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
北京航空航天大学学报(2022年5期)2022-06-06
中学生数理化(高中版.高考数学)(2021年5期)2021-07-21
数理化解题研究(2020年13期)2020-05-07
数学物理学报(2019年5期)2019-11-29
电子制作(2018年11期)2018-08-04
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
电测与仪表(2016年9期)2016-04-12
