
正交变换的性质及其应用
2017-03-23 09:02:40河北省衡水一中庄钊栋陈铁乱
中学数学杂志 2017年5期
☉河北省衡水一中 庄钊栋 陈铁乱
正交变换的性质及其应用
☉河北省衡水一中 庄钊栋 陈铁乱
解析几何与高等代数是数学专业的两门基础课,它们分属几何与代数两大学科,各有独立的教学体系,彼此之间又有着密切的联系,而变换又是几何学与代数学中的分支,在经过多年的发展之后,变换已经积累了大量的理论和结果,其应用领域也在不断扩大.最初,变换主要用来讨论图形之间转变的问题,后来由于变换的应用越来越多,又将变换具体化,由此产生了线性变换,而正交变换是其中的一种变换.当时正交变换已经用来研究代数和几何中的很多问题,又由于应用的不同,将正交变换又具体分为平移变换、旋转变换、反射变换、滑移反射变换等.如今,正交变换本身及其在数学、物理学、计算机科学系、光学等领域中的应用越来越受到人们的重视.本文在前人研究的基础之上,试图研究正交变换的一些性质及其应用,使正交变换的一些性质能够反映到几何与代数上,通过代数与几何中共同的知识解决数学中的一些其他问题.
一、预备知识
定义1.1正交变换在代数中的定义:欧氏空间V的一个线性变换σ称为正交变换,如果它保持向量的内积不变,即对任意的α,β∈V,都有(σ(α),σ(β))=(α,β).
设η1,η2,…,ηn是欧氏空间V的一组标准正交基,在正交变换σ下,σ(η1),σ(η2),…,σ(ηn)也是V的一组标准正交基,设
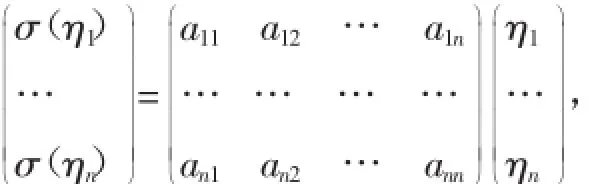
A=(aij)为正交矩阵,则有限维向量空间V的正交变换σ可表示为σ:α→Aα,即σ(α)=Aα,其中A为正交矩阵.
定义1.2正交变换在几何中的定义:如果欧氏空间的点变换,把任意线段的两个端点变成等长线段的两个端点,则称其为正交变换(亦称全等变换,又称等距变换),平移、旋转、反射、滑移反射等是正交变换的几种特殊形式.
在标准正交基下,把点P(x1,x2,…,xn)变成点P′(x1′,x2′,…,xn′)的正交变换τ的公式表示是
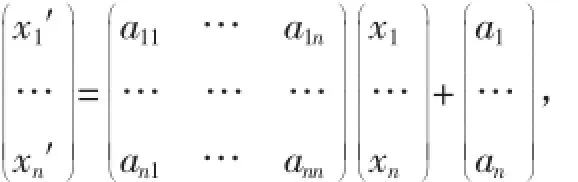
其中A=(aij)为正交矩阵.
定义1.3取定平面π上向量υ.把平面π上的每一点P沿向量υ的方向平移到P′,使,这样得到的变换叫做平面π的一个平移变换,简称平移,记为tυ.
定义1.4把平面π上的每一点P绕一定点O旋转一定角θ变到另一点P′,这样得到的变换叫做π的旋转变换,简称旋转记为r(O,θ).定点O叫做旋转心,定角θ叫做旋转角.
定义1.5取定平面π上的一条直线l.把任意一点P映到它关于直线l的对称点P′,这样得到的π的变换称为平面π对于直线l的轴反射变换,简称反射,记为sl,称l为反射轴.
定义1.6设υ是一个平行于直线l的向量,把每个点P变到它关于l的对称点Q以后再沿向量υ平移到P′,使,这样将P映到P′的变换称为沿直线l的滑移反射,滑移向量为υ.这也就是一个平行直线l的向量υ确定的平移tυ和对于直线l的反射sl的乘积tυsl.
二、正交变换在代数中的性质及其证明
性质2.1设σ是n维欧氏空间V的一个线性变换,于是下面四个命题是等价的:
(1)σ是正交变换;
(2)σ保持向量的长度不变,即对于α∈V,|σ(α)|=|α|;
(3)如果ε1,ε2,…,εn是标准正交基,那么σ(ε1),σ(ε2),…,σ(εn)也是标准正交基;
(4)σ在任意一组标准正交基下的矩阵是正交矩阵.
证明:首先证明(1)与(2)等价.如果σ是正交变换,那么(σ(α),σ(α))=(α,α),两边开方即得|σ(α)|=|α|.
反过来,如果σ保持向量的长度不变,那么(σ(α),σ(α))=(α,α),(σ(β),σ(β))=(β,β),(σ(α+β),σ(α+β))=(α+β,α+β),
把最后的等式展开即得(σ(α),σ(α))+2(σ(α),σ(β))+(σ(β),σ(β))=(α,α)+2(α,β)+(β,β),
再利用前面的两个等式,就有(σ(α),σ(β))=(α,β),也就是说σ是正交变换.
再来证(1)与(3)等价.
设ε1,ε2,…,εn是一组标准正交基,即(εi,εj)=(i,j=1,2,…,n).如果σ是正交变换,那么(σ(εi),σ(εj))= .这就是说σ(ε1),σ(ε2),…,σ(εn)是标准正交基.
反过来,如果σ(ε1),σ(ε2),…,σ(εn)是标准正交基,那么由α=x1ε1+x2ε2+…+xnεn,β=y1ε1+y2ε2+…+ynεn,
与σ(α)=x1σ(ε1)+x2σ(ε2)+…+xnσ(εn),
σ(β)=y1σ(ε1)+y2σ(ε2)+…+ynσ(εn),
即得(α,β)=x1y1+x2y2+…+xnyn=(σ(α),σ(β)),
因此σ是正交变换.
最后来证(3)与(4)等价.
设σ在标准正交基ε1,ε2,…,εn下的矩阵为A,即(σ(ε1),σ(ε2),…,σ(εn))=(ε1,ε2,…,εn)A,如果σ(ε1),σ(ε2),…,σ(εn)是标准正交基,那么A可以看做由标准正交基ε1,ε2,…,εn到σ(ε1),σ(ε2),…,σ(εn)的过渡矩阵,因而是正交矩阵.
反过来,如果A是正交矩阵,那么σ(ε1),σ(ε2),…,σ(εn)就是标准正交基.
这样,我们就证明了(1)(2),(3),(4)的等价性.
性质2.2设σ为欧氏空间V的可逆变换,则σ为V的正交变换的充要条件是:对任意的ξ,η∈V,有(σ(ξ),η)=(ξ,σ-1(η)).
证明:必要性:因为可逆变换σ为V的正交变换,所以对任意的ξ,η∈V,有(σ(ξ),η)=(σ(ξ),Eη)=(σ(ξ),σ(σ-1(η)))=(ξ,σ-1(η)).
充分性:由条件知,对任意的ξ,η∈V,
有(σ(ξ),σ(η))=(ξ,σ-1(σ(η)))=(ξ,Eη)=(ξ,η).
所以由性质2.1可知,σ为V的正交变换.
对任意的ξ,η∈V,a∈R,
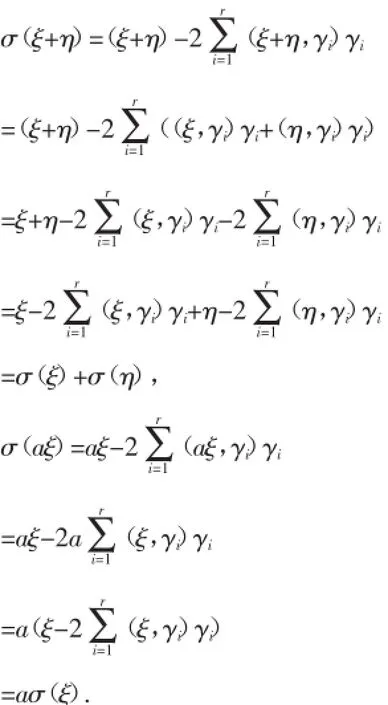
所以σ是V到V的线性变换.
对任意的ξ∈V,
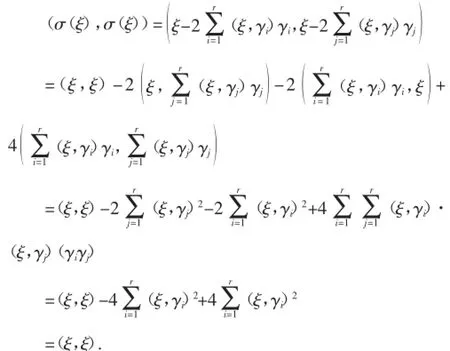
这说明|σ(ξ)|=|ξ|,根据性质2.1可知,σ是V的正交变换.
性质2.4设α1,α2,…,αm和β1,β2,…,βm是n维欧几里得空间的两个向量组,试证明存在一个正交变换σ,使得σ(αi)=βi,i=1,2,…,m的充要条件是(αi,αj)=(βi,βj),i,j= 1,2,…,m.
证明:必要性:设σ是正交变换,满足σ(αi)=βi,i= 1,2,…,m,由正交变换的定义,有(βi,βj)=(σ(αi),σ(αj))=(αi,αj),i,j=1,2,…,m.
充分性:已知(αi,αj)=(βi,βj),i,j=1,2,…,m.
若α1,α2,…,αm线性无关,将其单位正交化,得到ε1,ε2,…,εm,它们两两正交,且都是单位向量.
设ε1=a11α1,
ε2=a12α1+a22α2,
…
εm=a1mα1+a2mα2+…+ammαm,
写成矩阵形式(ε1,ε2,…,εm)=(α1,α2,…,αm)A,
构造向量组η1=a11β1,
η2=a12β1+a22β2,
…
ηm=a1mβ1+a2mβ2+…+ammβm,
其矩阵形式为(η1,η2,…,ηm)=(β1,β2,…,βm)A,
下面证明η1,η2,…,ηm线性无关.
对k1η1+k2η2+…+kmηm=0,两边用ηi(i=1,2,…,m)作内积,得齐次线性方程组
k1(η1,ηi)+k2(η2,ηi)+…+km(ηm,ηi)=0,i=1,2,…,m.
方程组的系数矩阵的行列式
由于ε1,ε2,…,εm线性无关,所以ε1,ε2,…,εm的格拉姆行列式不等于0,所以η1,η2,…,ηm线性无关.
分别将ε1,ε2,…,εm与η1,η2,…,ηm扩充成标准正交基:ε1,ε2,…,εn和η1,η2,…,ηn,则存在线性变换σ,使σ(εi)=ηi,i=1,2,…,n.
由于ε1,ε2,…,εn与η1,η2,…,ηn都是标准正交基,所以σ是正交变换.
又(β1,β2,…,βm)A=(η1,η2,…,ηm)
=(σ(ε1),σ(ε2),…,σ(εm))
=σ(ε1,ε2,…,εm)
=σ(α1,α2,…,αm)A.
由于A是可逆矩阵,于是有σ(αi)=βi,i=1,2,…,m.
当α1,α2,…,αm线性无关时,不妨设α1,α2,…,αr是一个极大线性无关组.由上面证明知道,β1,β2,…,βr线性无关,对于∀j,

所以β1,β2,…,βr是β1,β2,…,βm的一个极大线性无关组.
对α1,α2,…,αr与β1,β2,…,βr用前述方法可得到正交变换σ,使得σ(αi)=βi,i=1,2,…,r.而r+1≤s≤m,

三、正交变换在几何中的性质及其证明
性质3.1设σ为欧氏空间V中的等距变换,x,y为V中的任意两点,则有
(1)x·y=[σx)-σ(0)]·[σ(y)-σ(0)],
(2)σ(x+y)=σ(x)+σ(y)-σ(0),
(3)σ(kx)-σ(0)=k[σ(x)-σ(0)](k∈R).
证明:(1)因为σ为等距变换,所以d(0,x)=d(σ(0),σ(x)),d(0,y)=d(σ(0),σ(y)),d(x,y)=d(σ(x),σ(y)).
又因为d2(x,y)=|y-x|2=d2(0,x)+d2(0,y)-2x·y,
d2(σ(x),σ(y))=|σ(y)-σ(x)|2
=d2(σ(0),σ(x))+d2(σ(0),σ(y))-2[σ(x)-σ(0)]·[σ(y)-σ(0)].
比较以上两式,立即得出(1)的结论是成立的.
展开后利用(1)的结论得

=(x+y)2+x2+y2-2(x+y)·x-2(x+y)·y+2x·y=0.
所以,σ(x+y)-σ(x)-σ(y)+σ(0)=0,因此(2)的结论是正确的.
(3)的证明与(2)的证明类似,在此省略.
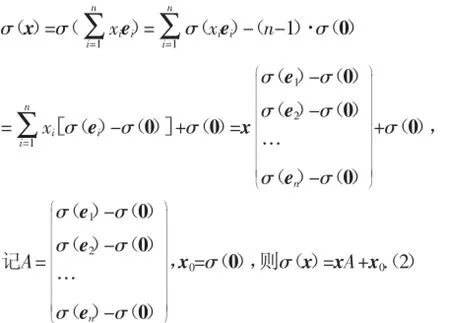
性质3.2n维欧氏空间V中一个变换σ为等距变换的充分必要条件是σ(x)=xA+x0,(1)其中x为V中任意一点,x0为V中一定点,A为正交矩阵.
证明:必要性:取V中n+1个点,原点O,V1(1,0,0,…,0),V2(0,1,0,…,0),…,Vn(0,0,…,0,1),Vi的向径记为ei.设x=(x1,…,xn)为V中任意一点,那么
应用性质3.1得
充分性:将(1)改写成σ(x)=xA+x0,显然x0=σ(0),设x,y为V中任意两点,有
d2(σ(x),σ(y))=|σ(y)-σ(x)|2=|(y-x)A|2
=(y-x)AA′(y-x)′|y-x|2=d2(x,y),
即d(x,y)=d(σ(x),σ(y)).充分性得证.
性质3.3一个平移和一个反射的乘积是一个滑行反射.
证明:设l是π上一条直线,υ是π上一个向量.考虑对于l的反射sl和υ确定的平移tυ.取l为x轴建立直角坐标系,设υ(x0,y0).令u(x0,0),方程为的直线记为l′.考虑沿直线l′且滑移向量为u的滑移反射f=tusl′.设f将点P(x,y)映到点P′(x′,y′),则但sl将P(x,y)映到Q(x,-y),tυ将Q(x,-y)映到P′(x+x0,-y+y0).于是tυsl也是将P映到P′.因此,tυsl=tusl′,即证明了一个平移和一个反射的乘积是一个滑移反射.
四、代数中的正交变换与几何中的正交变换的区别与联系
定义1.1和定义1.2虽则都称为正交变换,但是仅仅从定义上看,它们是有明显区别的:
定义1.1中的σ是欧氏空间V的线性变换,而定义1.2中的τ是欧氏空间中的一个变换,但并没有强调它必须是线性变换.
事实上,从变换公式中我们可以很容易地看到,对于σ有,对∀α,β∈V,k,m∈F(F是数域)有σ(kα+mβ)= A(kα+mβ)=k(Aα)+m(Aβ)=kσ(α)+mσ(β).
另一方面,只有当(a1,…,an)T=0时,τ才是线性变换,一般情况下τ不是线性变换.因此,一般而言,这两个概念是有差异的.
除上述差异外,这两个概念之间其实还存在许多相同之处:
(1)变换σ,τ的公式表示中,矩阵都是正交矩阵;
(2)σ保持向量的长度不变,τ保持两点间线段的长度不变,二者都具有保距性;
(3)σ把V中的标准正交基变成标准正交基(这也是之所以称其为正交变换的原因),而易于证明,τ也是把欧氏空间的标准正交基变成标准正交基.
由此看来,定义1.1和定义1.2在本质上又是一样的.
平面上的平移变换(又称点变换)是一个等距变换,而在此变换下,标准正交基仍变成标准正交基.同时,该平移诱导了一个正交向量变换,其表达形式为τ(α)=Aα,这和定义1.1中的表达形式是一致的,即平移变换是等距变换,本质上也是正交变换.因此,我们可以说正交变换、等距变换是一个概念,这也是将正交变换又称为等距变换的原因.
但一般而言,平面的正交变换和仿射变换不是线性变换.
因此,既充分考虑到代数中和几何中正交变换两个概念在本质上的一致(保距,保正交,都可以写成正交向量变换的形式),又考虑到两个概念在形式上的区别,可将代数中的正交变换称为正交向量变换,将几何中的正交变换称为正交点变换,二者都是等距变换.
五、正交变换的应用
1.正交变换在重积分中的应用
证明:设(a,b,c)为三维空间的一个向量,单位向量化得
再将其扩充为三维空间的一个标准正交基,设为(a1,
作正交变换

则A为正交矩阵,即AAT=E,所以

两边转置得(x,y,z)=(u,v,w)A.于是
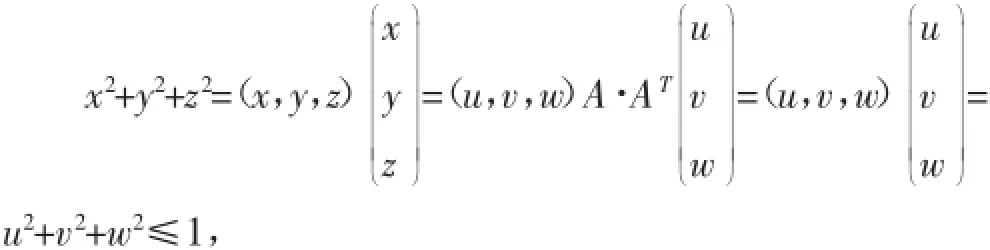
又因为AAT=E,而,由(1)式知,ax+by+cz=ku.
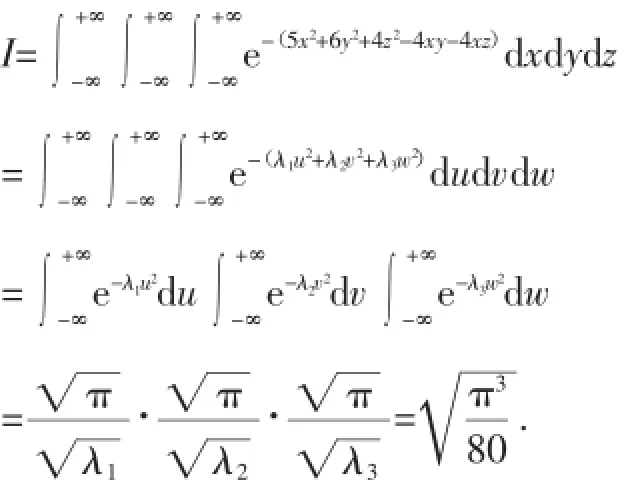
解:令f(x,y,z)=5x2+6y2+4z2-4xy-4xz,
容易判断它是一个正定矩阵,设其特征值为λ1,λ2,λ3,则λ1>0,λ2>0,λ3>0,|λ1λ2λ3|=|A|=80>0,
使f(x,y,z)=λ1u2+λ2v2+λ3w2.
由正交变换的性质可得
2.正交变换在曲面方程中的应用
二次曲面的方程
a11x2+a22y2+a33z2+2a12xy+2a13xz+2a23yz+2a14x+2a24y+ 2a34z+a44=0,(4)
X=(xyz1)T,A=(aij)3×3,(4)式可写成XTA~X=0,A~和A都是实对称矩阵.设T=(tij)3×3为三维空间正交变换的矩阵,将x,y,z的二次式(4)化成x′,y′,z′的二次式,但x′,y′,z′的二次式所对应的对称矩阵为B~和B,有|A~|=|B~|,| A|=|B|,秩(A~)=秩(B~),秩(A)=秩(B).
适当地选取正交矩阵T=(tij)(i,j=1,2,3),|T|=1,可有
T′AT=diag(λ1,λ2,λ3),(xyz)T=T(x′y′z′)T,
则方程(4)可化成
λ1x′2+λ2y′2+λ3z′2+2b14x′+2b24y′+2b34z′+b44=0,
对此再进行坐标系的平移与旋转可得其标准型.
例3用正交变换法化二次型f=2x1x2-2x3x4为标准型.
λ3=λ4=1,解特征方程得到ξ3=
则P是正交矩阵,且有PTAP=
例4求证曲面∑1:x3-y+z-1=0和∑2:x3-6x2+12x-y+ z-5=0关于点M(1,1,0)对称.
证明:设点P(x1,y1,z1)是∑1上任意一点,则z1-1=0.
若σ(P)=P′(x1′,y1′,z1′),则可以得知
代入得(2-x1′)3-(2-y1′)+(-z1′)-1=0,
整理得x1′3-6x1′2+12x1′-y1′+z1′-5=0,
即(x1′,y1′,z1′)在∑2上.
反之,可以证明对∑2上任意一点Q(x1,y1,z1),σ(Q)=Q′也都在∑1上,即∑1,∑2关于点M(1,1,0)对称.
例5求与椭球面∑10,1)对称的椭球面∑2的方程.
解:将∑1的方程中的下x,y,z分别用-2-x,-y,2-z代替,得即∑2的方程为
3.正交变换在条件极值中的应用
例6求F(x,y)=x2+y2在条件3x2+4xy+3y2=1下F的最大值和最小值.
解:3x2+4xy+3y2=1和F(x,y)=x2+y2表示为的特征根为1和5,取T=
因此求在条件X2+5Y2=1下,F=X2+Y2的最大值和最小值就可以了.
4.旋转变换在多元函数积分中的应用
例7设曲面∑为球面:x2+y2+z2=a2.试计算第一型曲面积分

解:直接计算将非常困难,但如果将被积函数化为一元函数,则有可能积出,加之被积函数中的x-2y-2z是x,y,z的线性函数,因此可考虑坐标系的旋转,例如,作旋转变换
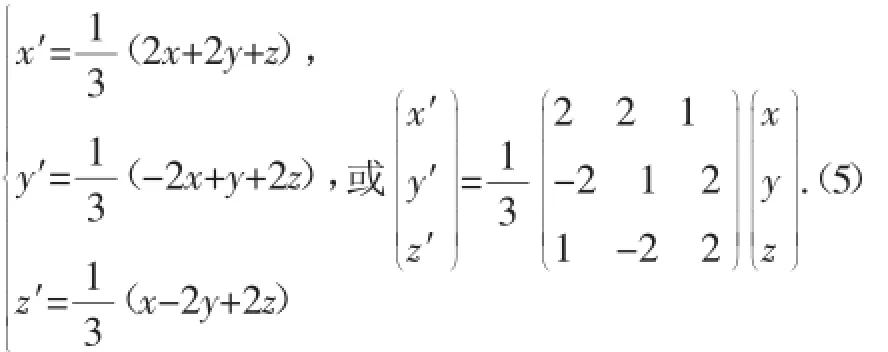
注意(5)式中的变换矩阵是一个行列式为1的正交矩阵,因此它可以表示一个将空间右手直角坐标系Oxyz变成右手直角坐标系Ox′y′z′的旋转变换,在此变换下(空间的点未动,只是点的坐标变了),∑的方程变为∑′:x′2+y′2+z′2=a2,所求积分化成为

利用球面的参数方程
r=(x′,y′,z′)=(asinφcosθ,asinφsinθ,acosφ),0≤φ≤π,0≤θ≤2π,
六、结束语
本文重点讨论了正交变换在重积分中的应用,化二次型为标准型中正交变换的应用,正交变换在曲面方程中的应用,正交变换在条件极值中的应用以及正交变换的一些性质及其证明.当然,本文仅讨论了正交变换在有限的数学范围内的应用,还有许多正交变换在其他数学领域内的应用并未讨论.
1.梅向明,黄敬之.微分几何[M].高等教育出版社,2005年4月.
2.余正光,何坚勇,王飞燕.线性代数与空间解析几何学习指导[M].科学出版社,2003年5月.
3.马忠林编著.几何学[M].吉林人民出版社,1984年4月.
4.方德植,陈奕培.射影几何[M].高等教育出版社,1983年8月.
5.H.S.M.考克赛特,S.L.格雷策.几何学的新探索[M].北京大学出版社,1986年1月.
6.张禾瑞,郝鈵新.高等代数[M].高等教育出版社,2005年12月.
7.萧树铁,居余马,李海中.代数与几何[M].高等教育出版社,2005年12月.
8.吴有为.欧式空间正交变换判别法讨论[J].数学通报,1993,(1).
9.胡国权编著.几何与代数引论[M].科学出版社,2006年9月.
10.杨子胥.内积关系与正交变换、对称变换、反对称变换[J].数学通报,1993,(1).
11.吕林根,许子道.解析几何[M].高等教育出版社,2001年6月.
猜你喜欢
河北理科教学研究(2021年4期)2021-04-19 13:34:48
数学年刊A辑(中文版)(2021年4期)2021-02-12 01:21:04
数学物理学报(2020年6期)2021-01-14 01:00:26
科学(2020年1期)2020-08-24 08:08:06
数学物理学报(2016年3期)2016-12-01 05:36:26
应用数学与计算数学学报(2015年1期)2015-07-20 11:39:06
中央民族大学学报(自然科学版)(2015年1期)2015-06-11 02:56:40
自然资源遥感(2014年3期)2014-02-27 11:56:33
探索地理(2013年5期)2014-01-09 06:40:44
领导文萃(2012年11期)2012-04-29 00:44:03
