
使用重叠换相的无刷直流电动机直接转矩控制
2017-03-09 07:22唐慧雨张兰红何坚强
微特电机 2017年1期
唐慧雨,张兰红,何坚强
(1.江苏大学,镇江 212013;2.盐城工学院,盐城 224051)
使用重叠换相的无刷直流电动机直接转矩控制
唐慧雨1,2,张兰红2,何坚强2
(1.江苏大学,镇江 212013;2.盐城工学院,盐城 224051)
在分析无刷直流电动机直接转矩控制原理的基础上,研究了无刷直流电动机换相转矩脉动的产生原因,指出转矩脉动主要由关断相电流和开通相电流变化速率不一致引起,提出了采用使关断相延迟关断的重叠换相直接转矩控制方案来减小换相转矩脉动,建立了考虑重叠换相的直接转矩控制电压矢量选择表。实验结果表明所提重叠换相DTC方案能够有效较小换相转矩脉动,实现简单,可使无刷直流电动机获得优良的运行性能。
无刷直流电动机;直接转矩控制;转矩脉动;重叠换相
0 引 言
无刷直流电动机因能量密度大、调速性能好和控制简单等优点,得到了越来越广泛的应用。但无刷直流电动机因反电势畸变和换相电流波动等原因,存在转矩脉动大的问题,影响了它的性能,限制了它在高精度场合的使用[1-3]。
近年来,关于如何解决转矩脉动问题的研究有很多,大体上分为3类:硬件方法、PWM调制方法和控制方法3类。文献[4]从硬件角度研究了减小转矩脉动的方法,但一定程度上增加了成本;文献[5]分析了4种PWM调制方式的换相转矩脉动,但未给出相应的减小转矩脉动的方案;文献[6-8] 采用PWM_ ON_ PWM 调制方法,使导通相与关断相电流的变化速率相等来减小转矩脉动。文献[9-10]提出了一种通过同步调制换相区内的关断相和非关断相来减小转矩脉动的方法,但该方法增加了换相时间。上述研究方法可以改善无刷直流电动机的转矩脉动,但控制算法相对较复杂,一定程度上弱化了无刷直流电动机的实用性。文献[11-15]将控制结构简单的直接转矩控制(Direct Torque Control,DTC)技术引入无刷直流电动机,DTC直接以转矩为控制对象,避开了反电势观测这一复杂环节,对非理想反电势引起的转矩脉动起到了很好的抑制作用[12],因此使用直接转矩控制的无刷直流电动机主要产生换相转矩波动。本文对使用DTC的无刷直流电动机的换相转矩波动原因进行深入研究,在此基础上寻求解决转矩脉动的方法,以获得结构与控制均简单的高性能无刷直流电动机控制系统。
1 无刷直流电动机的数学模型
逆变器控制的无刷直流电动机等效电路如图1所示,图中电机绕组采用三相星型连接方式。
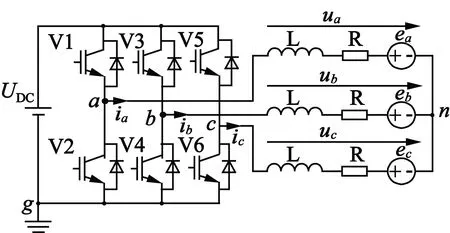
图1 逆变器控制的无刷直流电动机等效电路
忽略磁路饱和、铁耗和齿槽影响,无刷电机三相定子绕组电压和电流方程:
(1)
(2)
式中:ux,ix,ex分别为定子相电压、电流和反电势;R,L,M分别为定子电阻、自感与互感;x=a,b,c,表示a,b,c三相。
无刷直流电动机电磁转矩:
(3)
式中:ω是转子机械角速度。
图1中,g为逆变器直流侧的电源地,则:
(4)
式中:uxg(x=a,b,c)为定子绕组3个端点对地电压,ung为中性点对地电压。
将式(4)代入式(1)中,再将式(1)的3个方程式相加,由于三相电流之和恒为0,因此电机中性点电压:
(5)
2 无刷直流电动机的直接转矩控制
2.1 电压矢量
电压矢量与逆变器开关状态及电机绕组的连接方式密切相关。电压矢量表达式:
(6)
式中:α为旋转因子,α=ej2π/3。
两相导通方式的无刷直流电动机,相反电势和电流的波形如图2所示,反电动势为梯形波,相电流是矩形波,且与反电动势波形的平顶部分相对应。电机在60°电角度期间内工作相不变,将这60°电角度称为一个扇区。将空间划分为6个扇区,其中a相关断,b相流过正电流,c相流过负电流的区域定义为扇区Ⅰ。
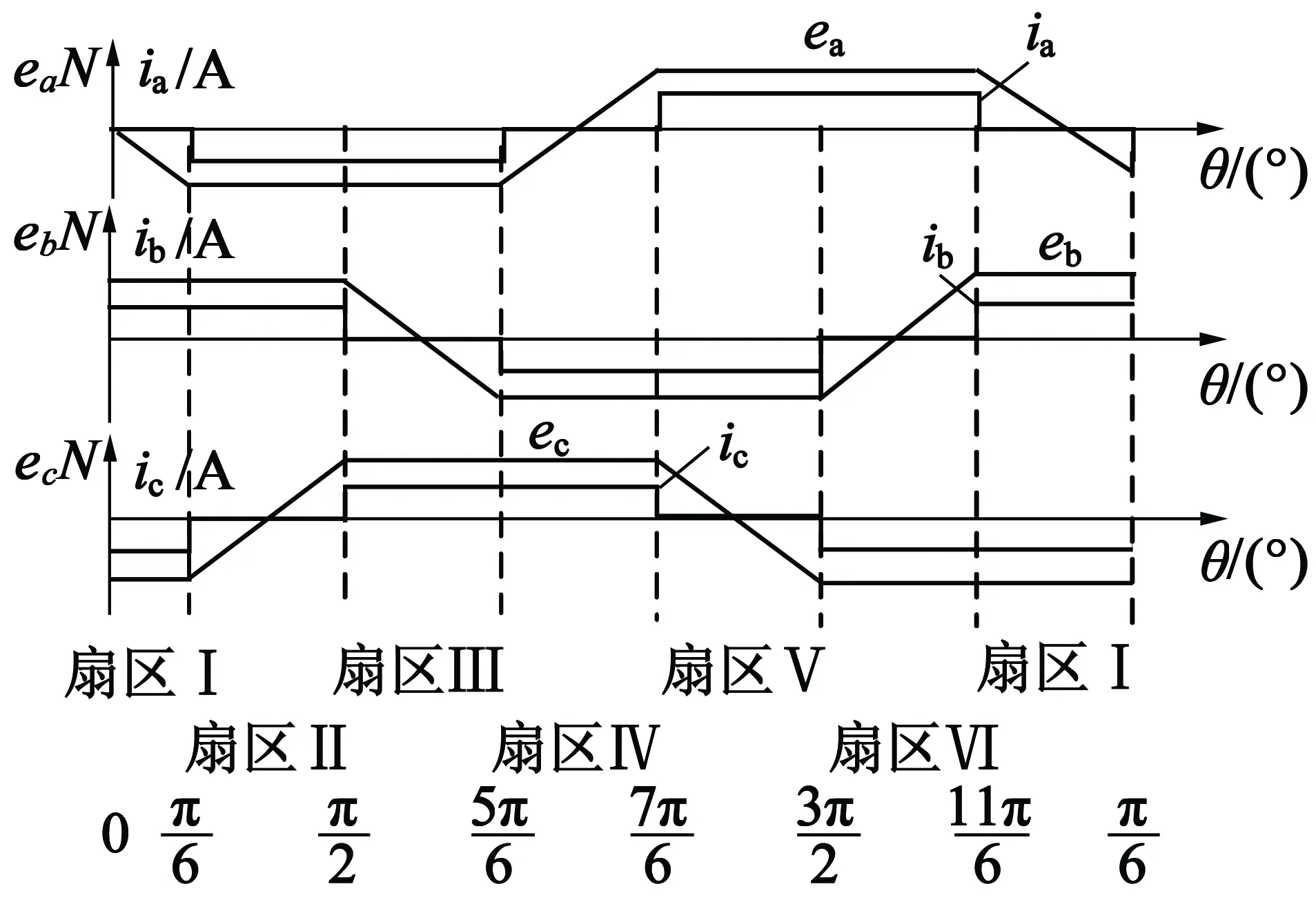
图2 两相导通方式下的相反电势和电流波形
以扇区Ⅰ为例,计算电压矢量us。由于a相关断,ia≡0,则dia/dt=0,由式(1)可知:ua=ea,在扇区Ⅰ,ua一直在线性变化;而b,c两相的相电压始终保持不变,ub=0.5UDC,uc=-0.5UDC,合成电压矢量:
(7)
式(4)所示的电压矢量包括两项,一项为固定项 ,它只和开关管状态有关,不随电动机的旋转而变化,另一项为变化项 ,它是由关断相反电势引起的,因关断相电流为0,该相对转矩无贡献,由反电势引起的电压矢量分量对转矩不起作用,因此对转矩有影响的电压矢量是由导通相引起的。将6个开关管的开关状态用数字量表示,1代表导通,0代表关断,两两导通的逆变器共有6个通电状态。对6个通电状态下导通相电压矢量进行计算,结果如表1所示。
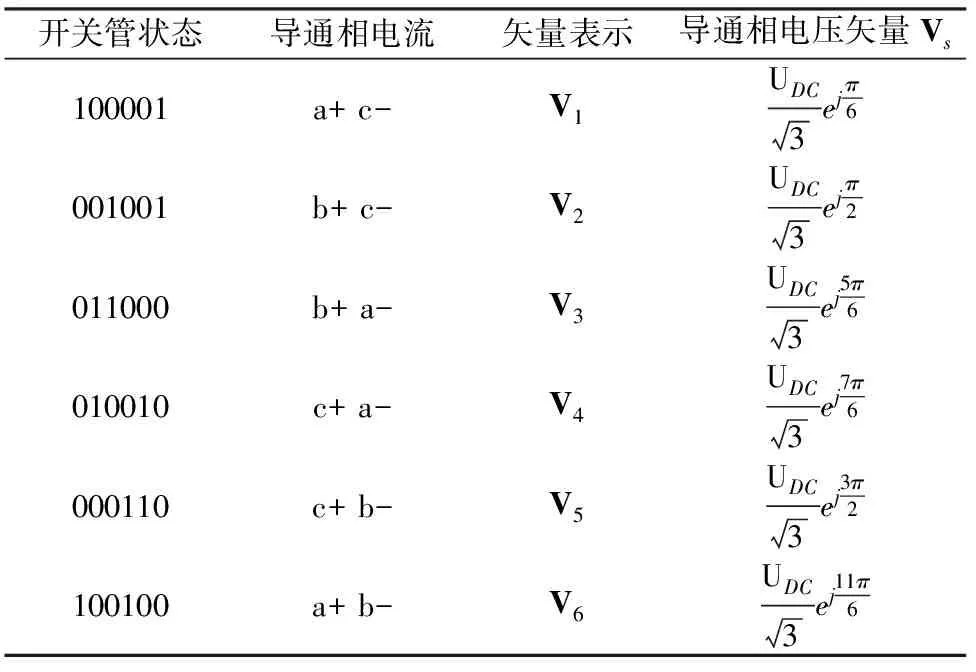
表1 无刷直流电动机导通相电压矢量Vs
导通相电压矢量分布如图3所示。以导通相电压矢量为边界,将空间电压矢量平面划分为Ⅰ~Ⅵ 6个扇区。根据图2在扇区Ⅰ应发V2(001001)矢量,设电机逆时针旋转,所以在图3中将扇区Ⅰ定义在滞后V2(001001)矢量60°~120°的区域。
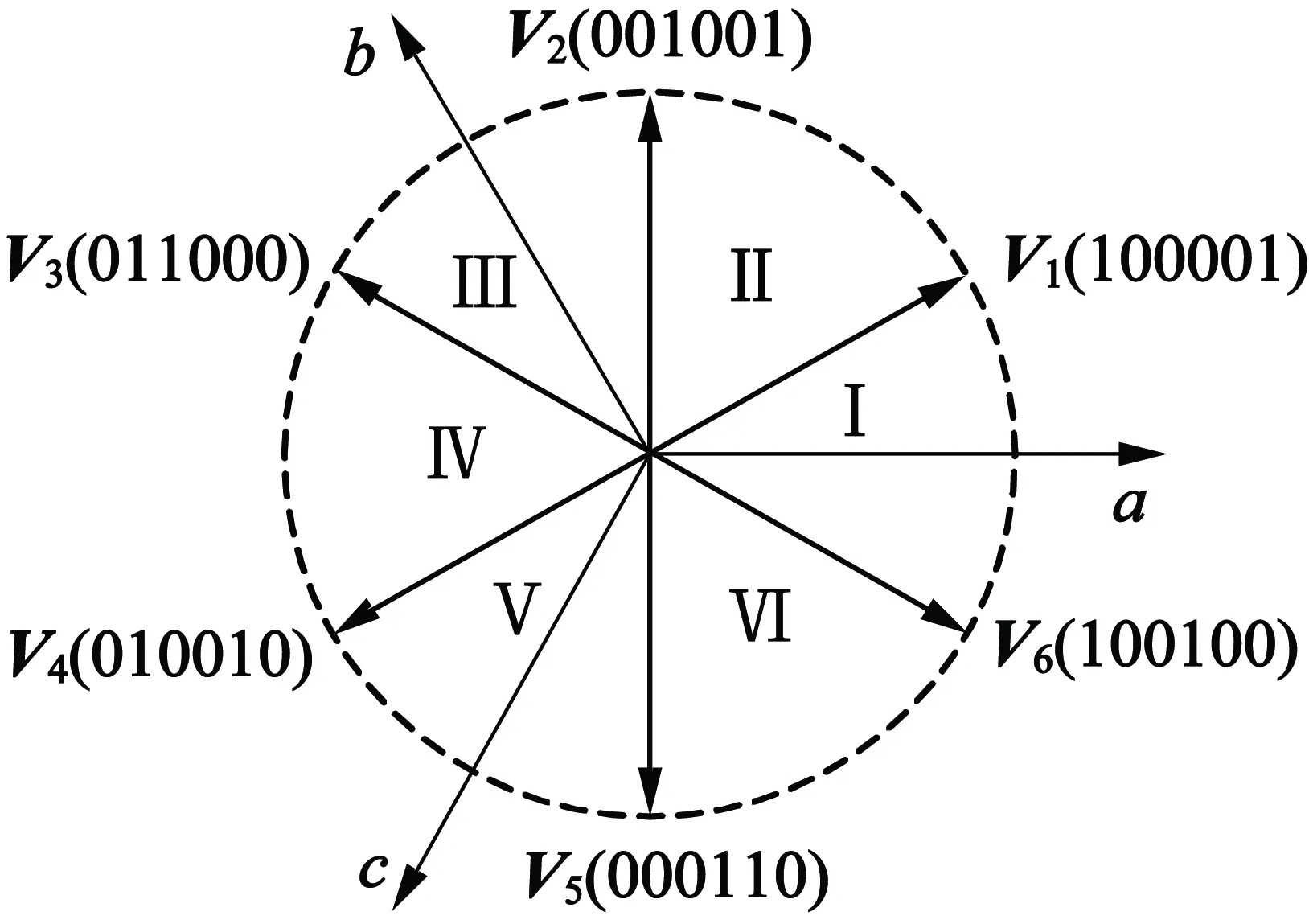
图3 导通相电压矢量分布图
2.2 导通相电压矢量作用分析
在图2扇区Ⅰ,a相关断,ia≡0,b相和c相导通,ib=-ic,根据式(3)有:
(8)
因反电势和转速成正比,幅值大小对称,设反电势系数为Ke,则eb=Keω,ec=-Keω,将其带入式(8)得:
Te=2Keib
(9)
式(9)说明,在扇区Ⅰ只要控制了ib,就控制了电磁转矩Te。此时的电流矢量:
(10)
ib幅值一定,可见电流矢量Is的方向和电压矢量V2的方向一致,将式(11)带入式(9)得:
(11)
由式(11)可见,无刷直流电动机中要迅速改变电磁转矩,可通过改变电流矢量来实现,而电流矢量由导通相电压矢量决定,因此导通相电压矢量是快速改变电磁转矩的关键物理量。
2.3 电压矢量选择表
由于无刷直流电动机转子永磁体磁链ψf幅值一定,设电枢反应磁链为ψa,则定子磁链ψs为:
(12)
由式(11)知定子电流矢量Is由电磁转矩Te决定,因此定子磁链由电磁转矩唯一确定,这样无刷直流电动机的直接转矩控制只要采用转矩单环控制,不需要转矩和磁链双环控制。设电机逆时针方向旋转,图3扇区Ⅰ中若要增加电磁转矩,可选V1,V2,V33个电压矢量,其中V2在增加转矩的同时,磁链幅值变化最小,V1,V3在增加转矩的同时分别使磁链增加和减小,转矩单环控制时,为保证磁链变化平稳,选择V2矢量。若要减小电磁转矩,可选V4,V5,V63个电压矢量,其中V5在减小转矩的同时,磁链幅值变化最小,V6,V4在减小转矩的同时分别使磁链增加和减小,同样为了保证磁链变化平稳,选择V5矢量。
从图2可见,发V5与V2矢量时,电流导通方向相反,由图3可见V5与V2在空间位置也相反,故将它们称为反矢量。文献[16]的研究表明,全关断矢量V0(000000)可以起到所有两两导通相电压矢量公共反矢量的作用,因此减小转矩时可以选择公共反矢量,不需要选择各导通相电压矢量单独的反矢量,据此建立表2所示的无刷直流电动机DTC最优导通相电压矢量选择表。表中τ为转矩调节器输出标志,τ=1表示需要增加电动机转矩,用和电机转向一致的最优导通相电压矢量完成,τ=0表示需要减小电机转矩,用公共反矢量V0(000000)完成。
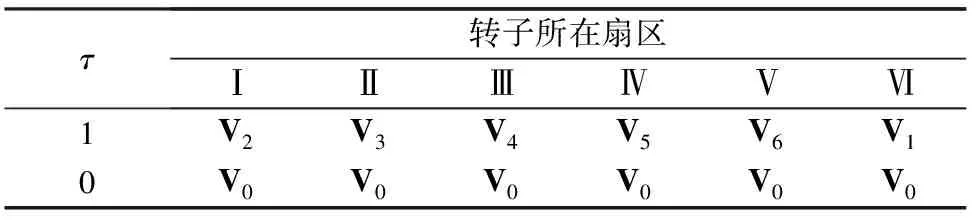
表2 无刷直流电动机DTC最优导通相电压矢量选择表
3 换相转矩脉动分析
以图4所示a→b到a→c的换相过程(即图2中转子磁场由V扇区进入VI扇区时)为例,研究电流在换相区的转矩波动。电机逆变器在短暂的换相过程中,各相反电势幅值近似不变。设反电势最大值为E,则:E=Kω,K为反电势系数的最大值。图4中ea=E,eb=ec=-E,根据式(2)和式(3)可得:
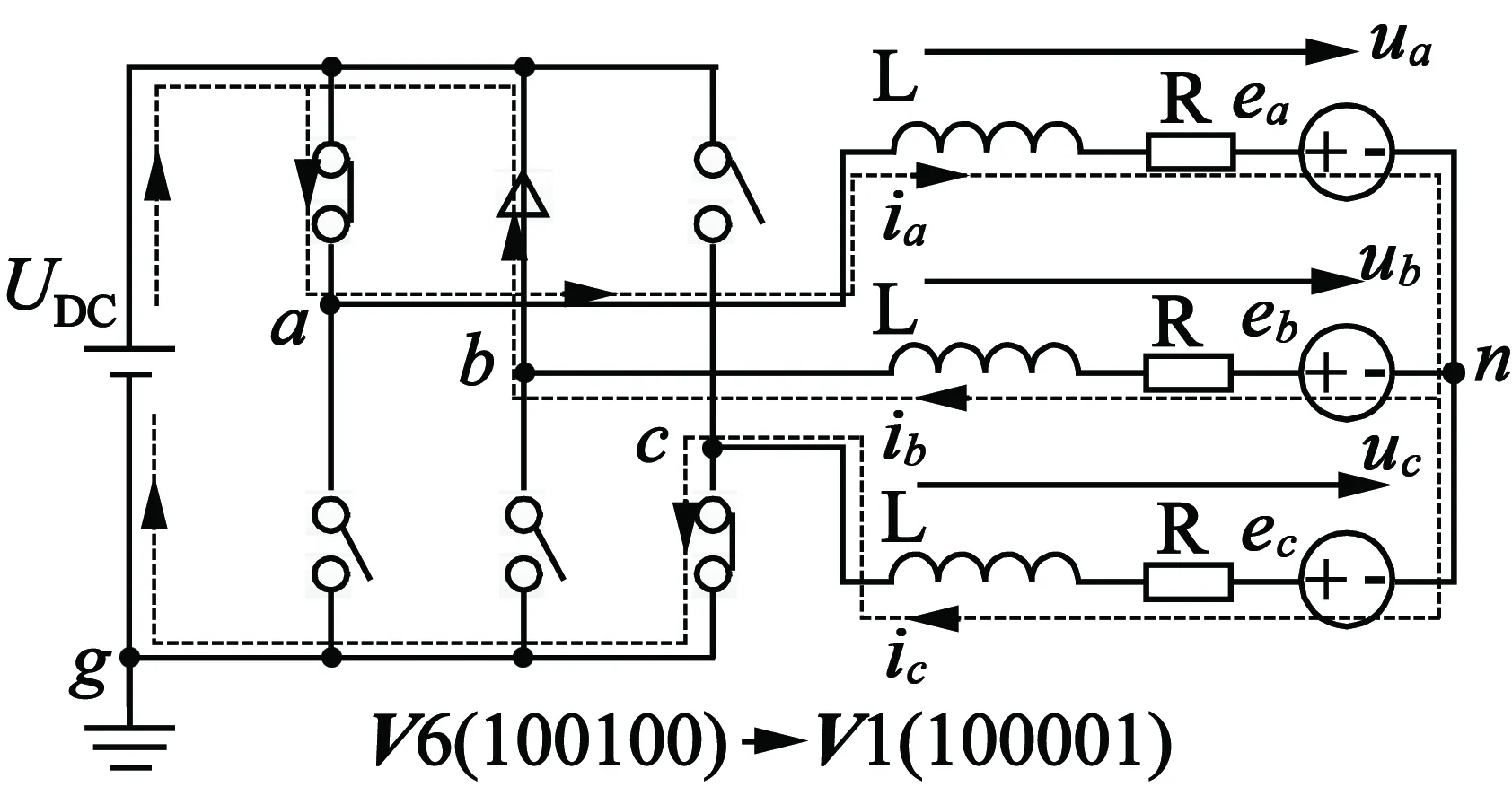
图4 无刷直流电动机换相工作过程
(13)
由式(13)可知,若要换相期间不产生转矩波动,则需使非换相相电流保持不变。
图4中,在换相期间,端电压uag=UDC,ucg=0,b相通过续流二极管反向导通,端电压为ubg=UDC。由式(5)可得,此时中性点电压:
(14)
a相相电压为:
(15)
与无刷直流电动机的绕组时间常数(L-M)/R相比,可以认为PWM的周期足够小,则Ria≪(L-M)dia/dt,因此可以忽略三相绕组电阻的影响,由式(1)可得:
(16)
将式(15)代入式(16),得到a相电流的变化率:
(17)
同理推得另外两相电流变化率:
(18)
(19)
由式(13)可知,在非换相相电流恒定时,换相期间不会出现转矩波动,此时:
(20)
当UDC>4E时,即电机的转速较低时,比较式(18)和式(19)可知,|dib/dt|<|dic/dt|,即关断相电流ib变化速率小于开通相电流ic变化速率,但式(2)所示的电流平衡式依然存在,因此,非换相a相电流ia上凸,引起转矩向增加的方向脉动。换相期间三相电流变化示意图如图5所示。
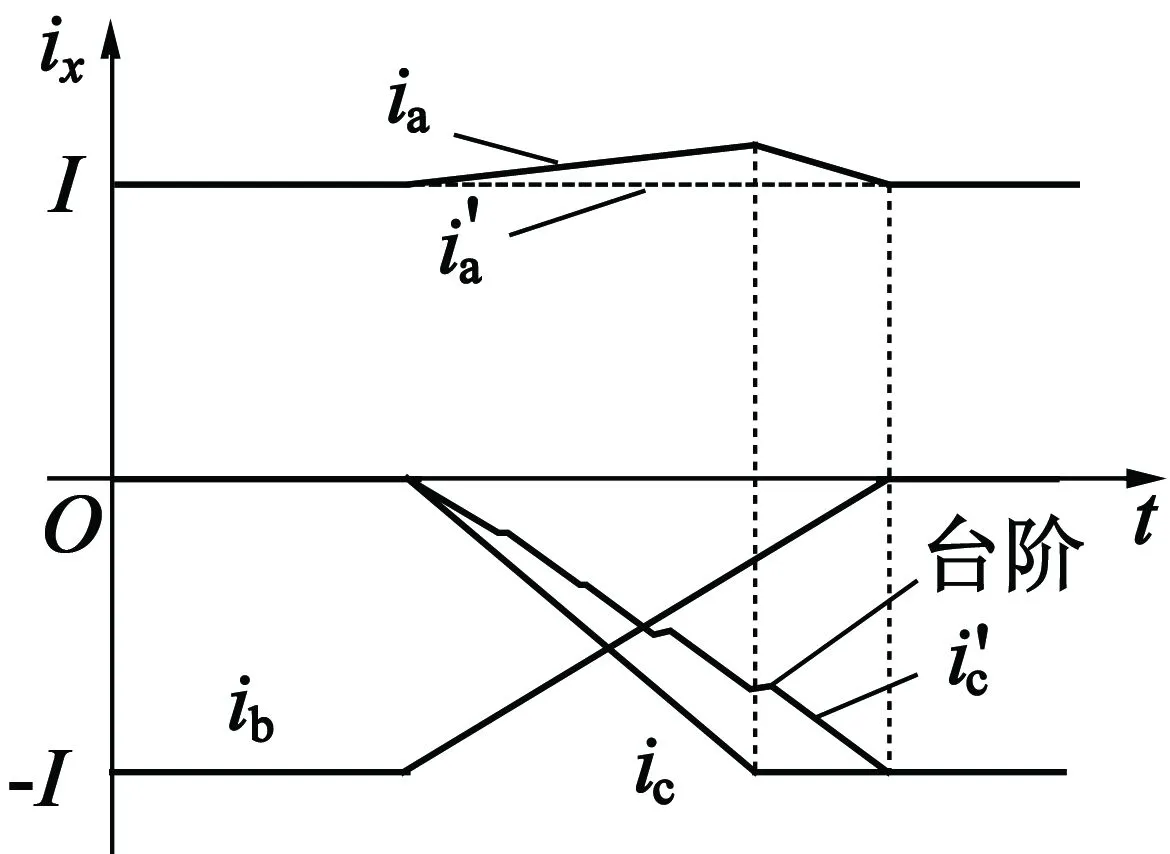
图5 换相期间的相电流(UDC>4E)
根据表2,在换相期间,若要使转矩减小,DTC会发全关断矢量V0(000000),导通相电流被斩波控制,其增加速率将变缓,这会达到抑制非换相电流上凸,减小转矩波动的目的。具体分析如下:换相时刻发生在转子磁场由V扇区变为VI扇区时,要使转矩增加,对电机施加导通相电压矢量V1(100001),要使转矩减小,施加全关断电压矢量V0(000000)。施加V0(000000)时,c相电流被斩波,出现如图5中所示的台阶,ic负向增加速率变缓,变为ic’,这样ia上凸被抑制,变为ia’,克服了换相转矩脉动。
当UDC<4E时,即电机的转速较高时,比较式(18)和(19)可知:|dib/dt|>|dic/dt|,即关断相和开通相的电流变化速率不一致依然存在,并且是关断相电流ib变化速率大于开通相电流ic的变化速率。根据式(2)所示的电流平衡式,非换相相a相电流下凹导致转矩向减小的方向脉动,此时换相电流如图6所示。由于关断相电流的减小速率大于开通相电流的增加速率,但关断相是不受控的,无法再用斩波方法对其控制,若将第2节所分析的直接转矩控制称为基本DTC,此时基本DTC方案不再能够抑制换相转矩波动,因此必须寻求新的方法来减小关断相电流变化速率,对非换相相电流的跌落进行补偿,才能减小转矩波动。
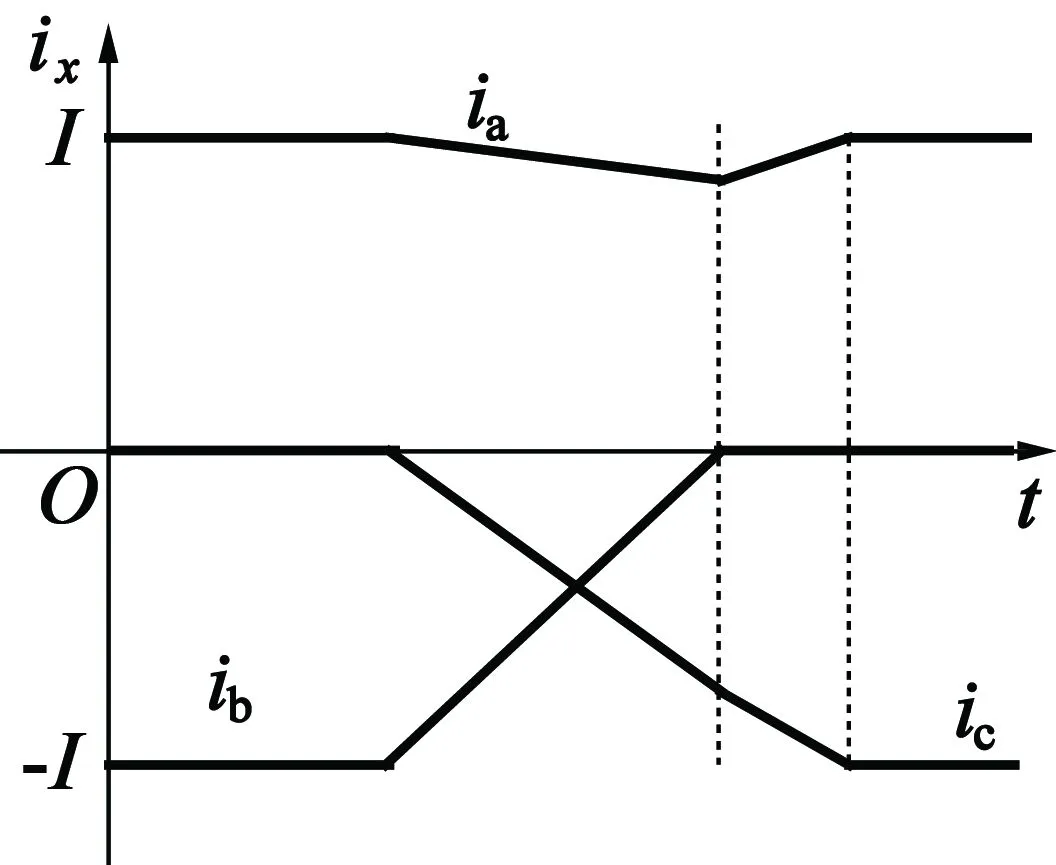
图6 换相期间的相电流(UDC>4E)
4 采用重叠换相的直接转矩控制
4.1 重叠换相法
重叠换相法是指无刷直流电动机平时采用两两导通方式、在换相期间使用三相导通的方式工作,使关断相延迟关断来减小关断相电流变化速率,从而补偿非换相相电流的跌落,达到抑制换相转矩脉动的作用。仍然以a→b到a→c的换相过程为例,在换相过程中关断相b相下桥臂功率开关管保持导通,实现重叠换相,换相过程如图7所示。
此时所发矢量为重叠换相矢量V(100101),端电压uag=UDC,ubg=ucg=0,由式(4)可得,此时中性点电压:
(21)
忽略绕组电阻,根据式(1)和式(4)可得a相绕组上的电压uLa:
(22)
因为UDC始终大于2E,由式(22)可知在换相期间,非换相相a相绕组电压始终大于0,这可以使a相电流上升。因此采用重叠换相法,在UDC<4E时,即高转速时可以达到补偿转矩跌落的目的。
4.2 采用重叠换相的DTC电压矢量选择表
根据第3节的分析,基本DTC可以解决UDC>4E情况下的换相转矩脉动。根据4.1节的分析,重叠换相法可以补偿UDC<4E情况下的换相转矩跌落,因此本文将重叠换相法应用于无刷直流电动机DTC,以全面减小无刷直流电动机各阶段的转矩脉动。
使用重叠换相的DTC的实现思路为:在当UDC>4E时的所有时间及UDC<4E时的两相导通期间,使用表2所示的两相开关表,根据转矩偏差,选择2个导通相电压的合成矢量,对转矩进行控制;UDC<4E时的换相期间重新设计开关表,实现三相重叠换相DTC。换相检测方法为:当检测到霍尔信号发生跳变后,表示换相开始,当检测到关断相电流过零点时,表示关断相电流衰减到0,换相完成。建立的重叠换相DTC电压矢量选择表如表3所示。
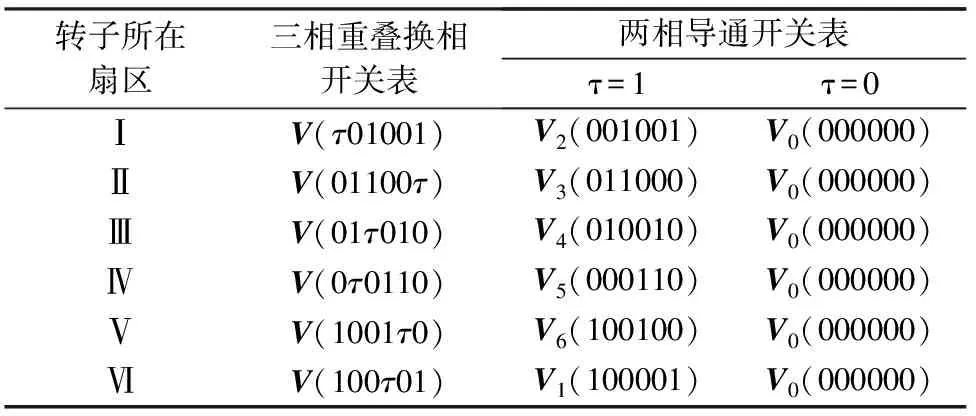
表3 采用重叠换相的DTC电压矢量选择表
在UDC<4E情况下,τ=0表示需要减小转矩,根据第3节的分析可知,在换相期间使用两相导通控制就可以减小转矩,此时将表4中最后一列的τ用0代入即可;τ=1表示需要增大转矩,在换相期间开关管应为三相导通模式,此时将表4中最后一列的τ用1代入,实现了三相导通重叠换相,达到补偿转矩跌落的目的。表4中最后一列τ=1时为新增加的6个三相重叠换相矢量,此时的矢量未定义下标,仅用考括号里面的数字来区分。
4.3 采用重叠换相的DTC结构
采用重叠换相的无刷直流电动机直接转矩控制结构如图8所示,包括扇区判别模块、转矩观测模块、转速计算模块、开关表选择模块、开关选择表和驱动模块等。
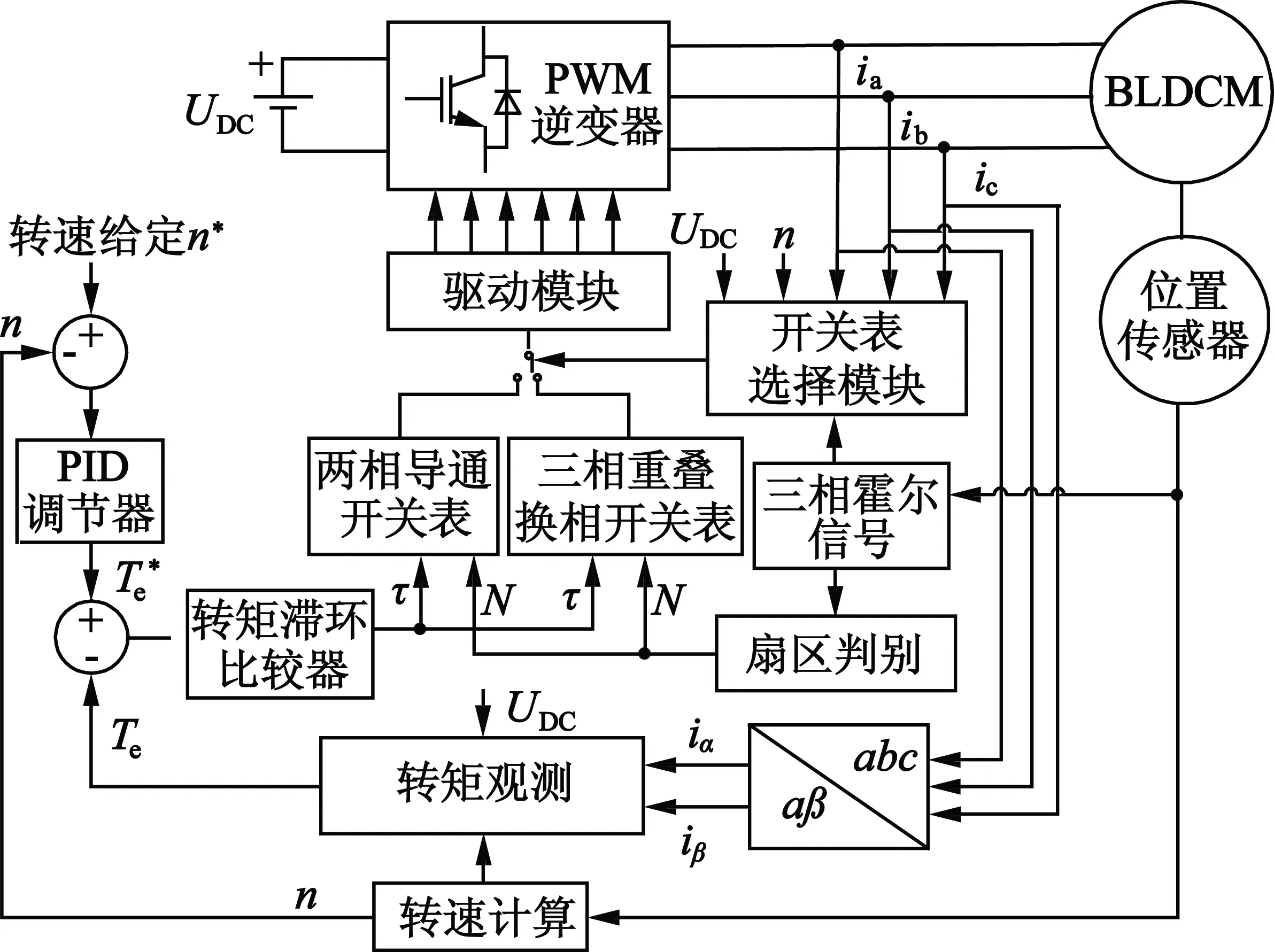
图8 使用重叠换相的DTC结构框图

5 实验结果分析
对采用重叠换相直接转矩控制的无刷直流电动机对转矩脉动的抑制进行了实验验证,实验所用电机的参数如表4所示,以TI公司的DSPTMS320F28335为控制核心实现控制算法。
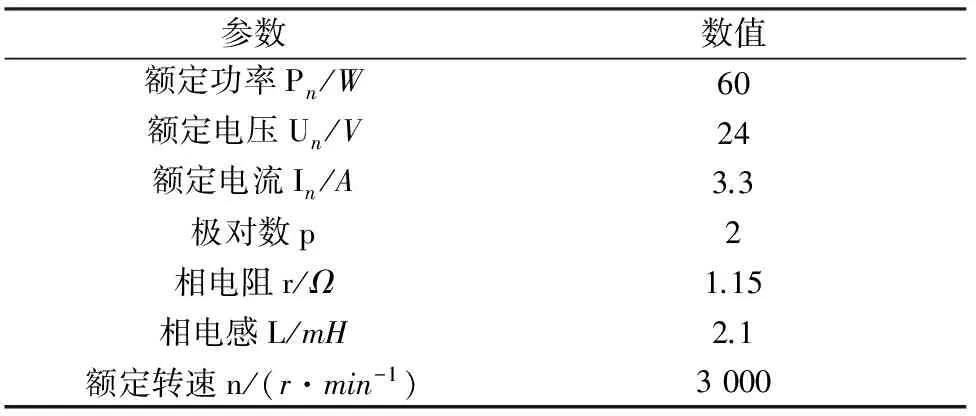
表4 永磁无刷直流电动机参数
5.1 低速时基本DTC对转矩脉动的抑制
将采用表2所示电压矢量选择表的直接转矩控制称为基本DTC。图9(a)与图9(b)分别为电机以1 500r/min低速、额定负载转矩0.18N·m运行时,采用传统PWM控制和基本DTC时电机a相电流及转矩波形图。从图9(a)可见,由于反电势为非理想方波等原因,采用传统PWM控制电机会产生较大的转矩脉动,转矩的脉动达到0.12N·m,而从图9(b)可见,基本DTC在低转速时可以很好的抑制转矩脉动,转矩波动范围减为0.06N·m,电机运行性能大大提高。
(a) 采用传统PWM控制时的电流与转矩
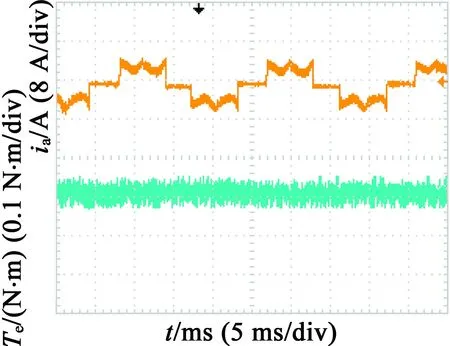
(b) 采用基本DTC的电流与转矩
5.2 高速时重叠换相DTC对转矩脉动的抑制
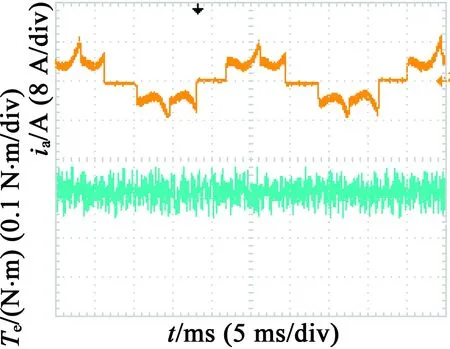
当电机以3 000r/min的高速、额定负载转矩运行时,使用基本DTC和重叠换相DTC时电机a相电流和转矩波形如图10所示。由图10(a)可见,每到换相时刻,采用基本DTC时电机转矩跌落较大,脉动幅值为0.1N·m。而从图11(b)可见,使用重叠换相DTC时,换相期间转矩不会发生跌落,脉动幅值减为0.08N·m。
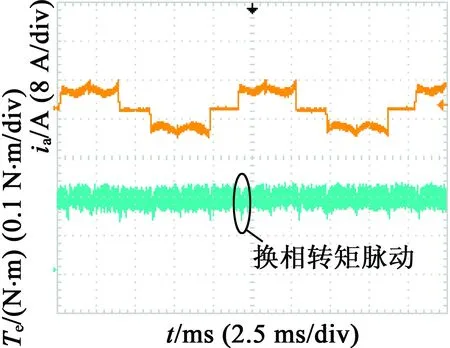
(a) 采用基本DTC
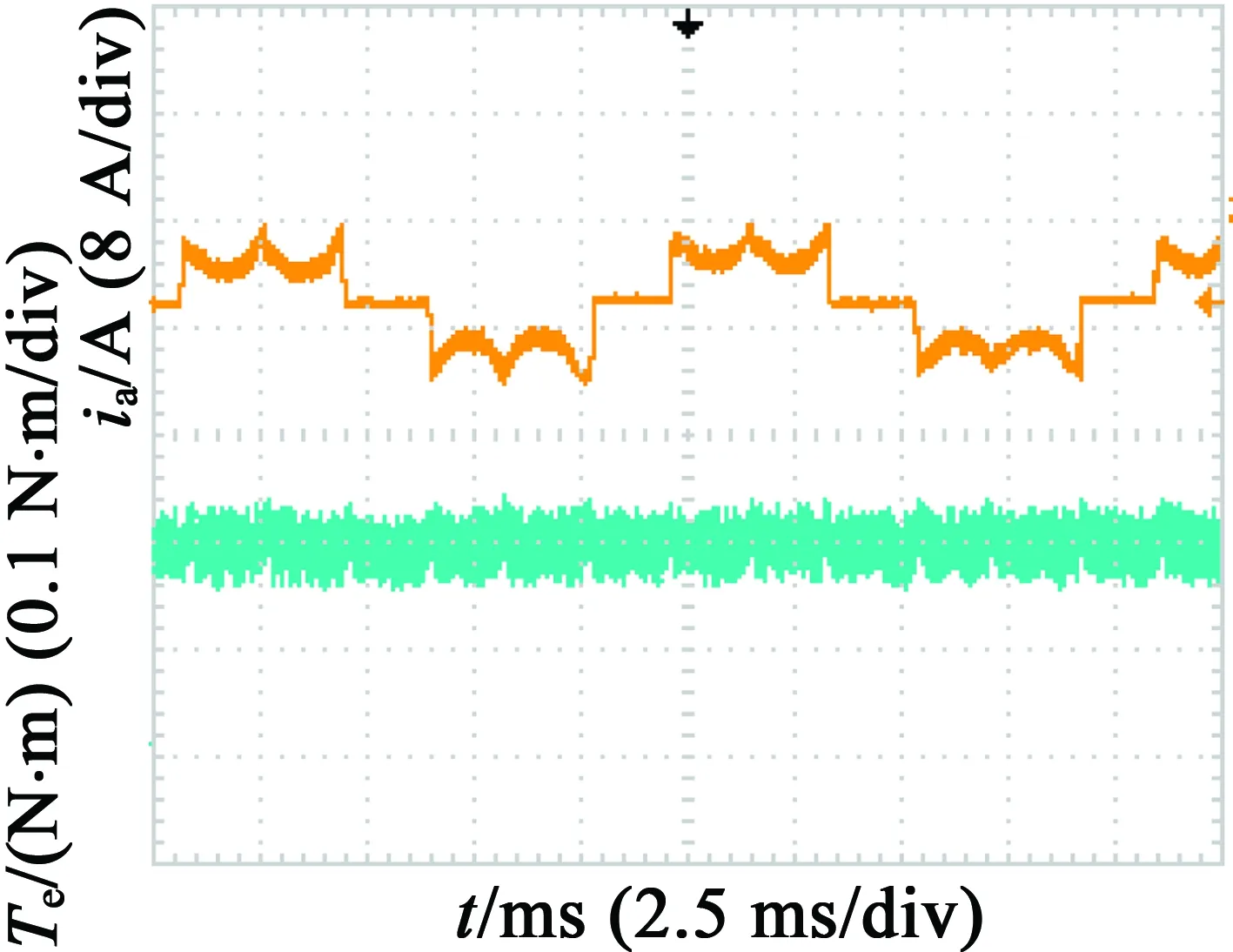
(b) 采用重叠换相DTC
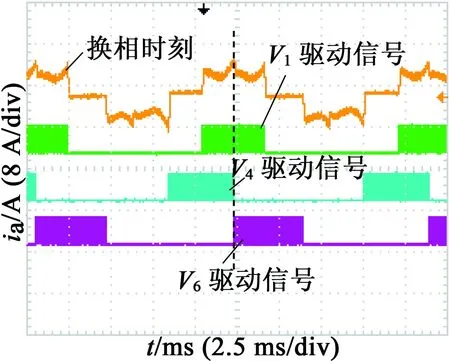
图11 功率管驱动信号及非换相相电流波形(截图)
图11给出了采用重叠换相DTC的功率管驱动信号和相电流波形,图中虚线处为重叠换相时刻。为了看清楚重叠换相对电流的影响,将换相前后瞬间的非换相相电流和驱动信号波形展开,如图12所示,比较图12(a)和(b)可见,当电机在高转速时,采用基本DTC非换相a相电流在换相时刻会发生较大跌落,使用重叠换相DTC后,关断相功率开关管V4的驱动信号在换相期间延迟关断,可以有效抑制换相电流波动,非换相a相电流波动明显减小。
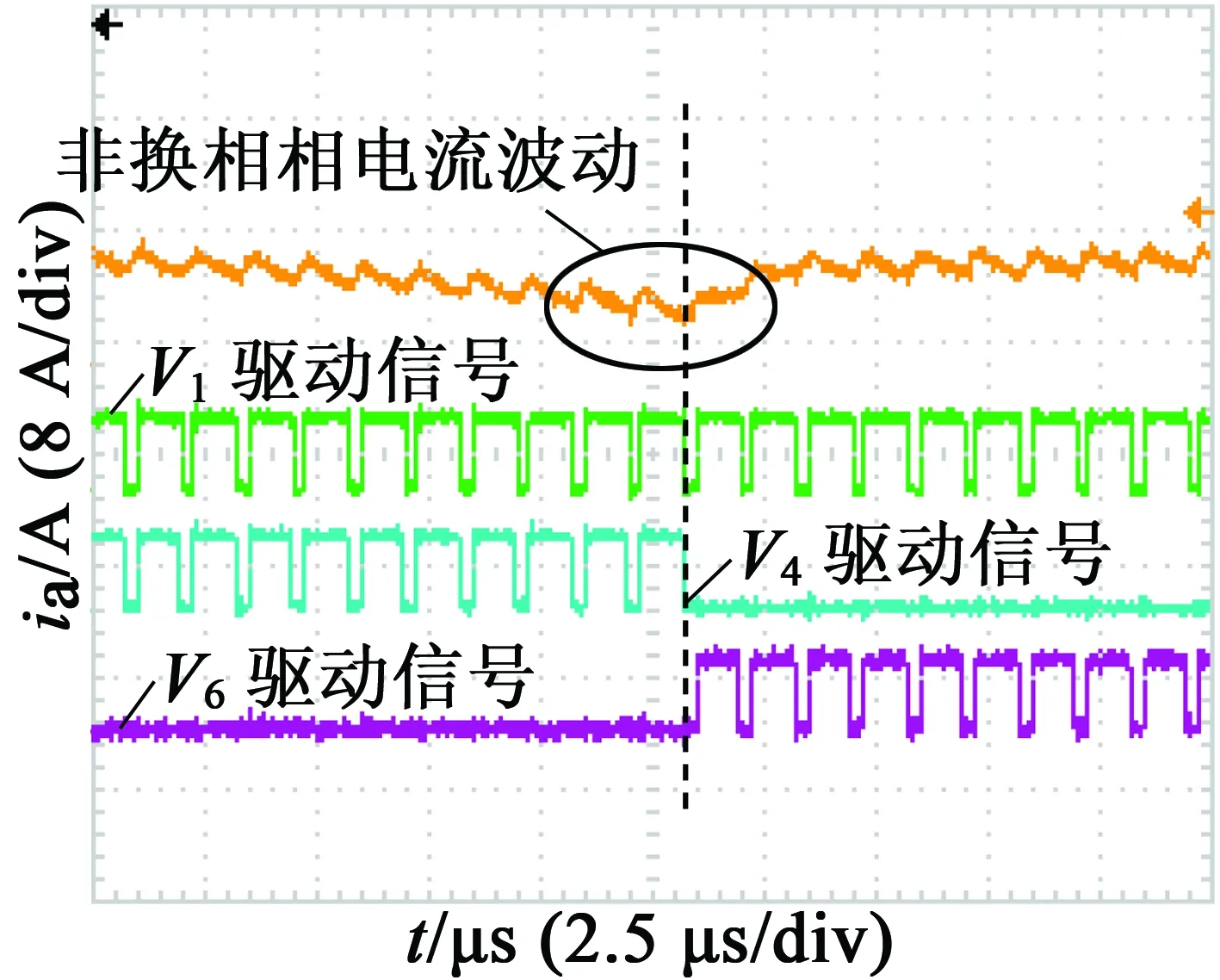
(a) 采用基本DTC方法
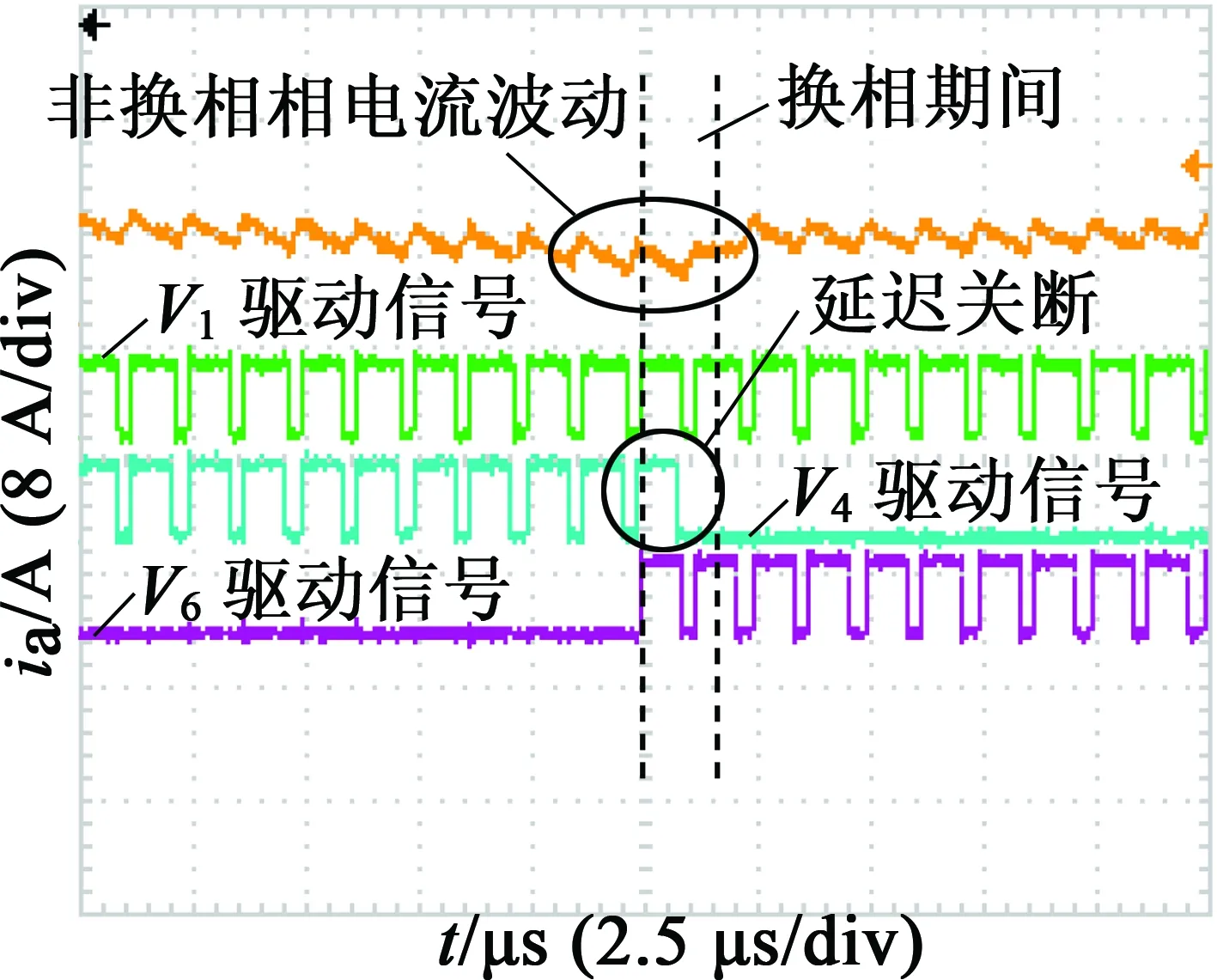
(b) 采用重叠换相DTC方法
从实验结果可见,本文提出的使用重叠换相的DTC方案能够有效地抑制换相电流波动导致的转矩波动,使无刷直流电动机平稳运行。
6 结 语
分析了采用DTC的无刷直流电动机换相转矩脉动原因,指出转矩脉动主要由关断相电流和开通相电流的变化速率不一致引起。提出了采用使关断相延迟关断的重叠换相DTC方案来减小换相转矩脉动,使无刷直流电动机全工作阶段都具有平稳的转矩。
重叠换相DTC方案相对于基本DTC来说,不需要改变硬件结构,只要调整控制算法,采用考虑重叠换相的电压矢量选择表即可,简单方便。实验结果表明所提重叠换相DTC方案能够有效较小换相转矩脉动,可使无刷直流电动机获得优良的运行性能,有利于无刷直流电动机在高性能要求场合的推广应用。
[1]ZHUZ,LEONGJH.AnalysisandmitigationoftorsionalvibrationofpmbrushlessAC/DCdriveswithdirecttorquecontroller[J].IEEETransactionsonIndustryApplications,2012,48(4):1296-1306.
[2] 盛田田,王晓琳,顾聪, 等.一种使用重叠换相法的无刷直流电机平均转矩控制[J].中国电机工程学报,2015,35(15):3939-3947.
[3] 夏长亮.无刷直流电机控制系统[M].科学出版社,2009.2.
[4]LINY-K,LAIY.Pulse-widthmodulationtechniqueforBLDCMdrivestoreducecommutationtorqueripplewithoutcalculationofcommutationtime[J].IEEETransactionsonIndustryApplications,2011,47(4):1786-1793.
[5] 张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(2):87-91.
[6] 王大方,卜德明,朱成,等.一种减小无刷直流电机换相转矩脉动的调制方法[J].电工技术学报,2014,29(5):160-166.
[7] 宋飞,周波,吴小倩.抑制无刷直流电机换相转矩脉动的新型补偿策略[J].中国电工技术学报,2008,23(11):28-33.
[8] 石坚,李铁才.一种消除无刷直流电动机换相转矩脉动的PWM调制策略[J].中国电机工程学报,2012,32(24):110-116.
[9] 揭贵生,马伟明.考虑换相时无刷直流电机脉宽调制方法研究[J].电工技术学报,2005,20(9):66-71.
[10] 林平,韦鲲,张仲超.新型无刷直流电机换相转矩脉动的抑制控制方法[J].中国电机工程学报,2006,26(3):153-158.
[11]LIUYong,ZHUZQ,HOWED.DirecttorquecontrolofbrushlessDCdriveswithreducedtorqueripple[J].IEEETransactionsonIndustryApplications,2005,41(2):599-608.
[12] 安群涛,孙立志,刘超,等.无刷直流电机的磁链自控直接转矩控制[J].中国电机工程学报,2010,31(12):86-92.
[13] 夏长亮,张茂华.永磁无刷直流电机直接转矩控制[J].中国电机工程学报,2008,28(6):104-109.
[14] 李珍国,章松发,周生海,等.考虑转矩脉动最小化的无刷直流电机直接转矩控制系统[J].电工技术学报2014,29(1):139-146.
[15] 杨建飞,胡育文.无刷直流电机无磁链观测直接转矩控制[J].中国电机工程学,2011,31(12):90-95.
[16] 胡育文,高瑾,杨建飞,等.永磁同步电动机直接转矩控制系统[M].北京:机械工业出版社,2015.3.
Direct Torque Control System of Brushless DC Motor Using Overlap Commutation Strategy
TANGHui-yu1,2,ZHANGLan-hong2,HEJian-qiang2
(1.Jiangsu University,Zhenjiang 212013,China;2.Yancheng Institute of Technology,Yancheng 224051,China)
According to the analysis of the principle of direct torque control (DTC) of Brushless DC motor (BLDCM), the reason of commutation torque ripple in BLDCM was studied. It was pointed out that the torque ripple is mainly caused by the different current change rate of the turn-off phase and the opening phase. In order to reduce the commutation torque ripple, it was proposed by using the overlapping commutation DTC scheme which makes the turn-off phase delay to turn off. The DTC voltage vector selection table which considers overlapping commutation was established. Experimental results show that overlapping commutation DTC scheme can effectively decrease the torque ripple when the phases are changed. The scheme is simple and easy to implement and can make BLDCM to obtain excellent operating performance.
brushless DC motor (BLDCM); direct torque control (DTC); torque ripple; overlap commutation
郝嘉欣(1990-),男,硕士研究生,研究方向为电动汽车热设计。
2016-08-06
江苏省“六大人才高峰”第十一批高层次人才选拔培养资助项目(XNYQC-004);江苏省政策引导类计划(产学研合作)——前瞻性联合研究项目(BY2015057-14)
TM33
A
1004-7018(2017)01-0049-06
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
南北桥(2022年2期)2022-05-31
微电机(2022年1期)2022-03-21
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
甘肃科技(2020年20期)2020-04-13
信息安全研究(2018年2期)2018-02-28
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
