
交错并联Buck变换器单电流传感器均流控制
2022-06-18 02:14付明朝
重庆理工大学学报(自然科学) 2022年5期
李 山,付明朝,郭 强,李 晋
(1.重庆理工大学 电气与电子工程学院, 重庆 400054;2.重庆市能源互联网工程技术研究中心, 重庆 400054)
0 引言
当前,多相交错并联直流变换器被广泛应用于生产生活中[1-3]。基于多相交错并联技术的变换器可以提高系统暂态响应速度,减小输出电流纹波;降低单个开关管电流应力;降低储能电感、滤波电容设计需求;还能大幅度增加系统传输功率和工作效率[4-6]。虽然交错并联技术具有很多优点,但因每相元器件参数无法完全一致、无源元件非理想的工作特性、输入扰动以及驱动信号延时不一致等原因,必须考虑各相电流的平衡问题。相电流失衡将导致单相电感出现磁饱和现象,甚至造成变换器不可控,直至系统崩溃[7-9]。因此,多相交错并联变换器均流问题一直是开关电源领域中的研究热点。文献[10]根据双闭环基本原理,在每相上使用电流传感器测得电感电流来实现各相均流,但由于传感器和控制器使用数量增加,使得系统成本增大,且降低了系统运行的可靠性。文献[11]和文献[12]利用输入电容电压纹波值得到相电流分布状态,根据相电流分布差异实现均流,但需要额外的带通滤波器,且电压纹波采样不够精确,扰动会导致相电流平衡调节时间变长。文献[13]在均流环上增加额外支路实现均流,由于该方法需要额外附加电路,最终会导致成本增加,控制系统变得复杂。
针对上述问题,基于三相交错并联Buck变换器,在传统单闭环电压型控制方法的基础上,提出了一种采用输入电流的单电流传感器均流控制策略。此处的“三相”不是指三相电,而是指三路Buck变换器并联,为便于分析,称为“三相交错并联”。该策略通过采样值重新构建每相电流,抵消各相电流之间的重构偏差。利用单电流传感器获得精确相电流偏差信号,降低系统设计成本,增大功率密度;根据相电流偏差信号进行各相占空比补偿,引入整流器中的前馈控制,在无附加电路的情况下,使得单电流传感器均流控制环路不受电压环路带宽影响,均流控制更加灵活。仿真与实验结果表明,该控制策略能解决多相交错并联变换器相电流失衡问题,减少电流传感器的数量,稳压和均流性能良好,对于构建高功率密度的交错并联Buck变换器具有参考意义。
1 占空比补偿原理
1.1 主拓扑结构
选择三相交错并联Buck变换器作为主拓扑,如图1所示。Vin为输入电压,iin为输入电流,Rs为输入电源内阻,Vo为输出电压,S1、S2、S3为功率开关管,D1、D2、D3为续流二极管,L1、L2、L3为储能电感,R1、R2、R3为各相寄生电阻,Co为滤波电容,R为负载。
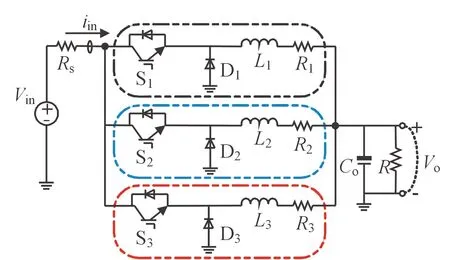
图1 三相交错并联Buck变换器主拓扑结构
理想工况下,交错并联Buck变换器采用电压型控制时,各相驱动信号平均导通开关管S1,S2和S3以实现稳压,使各相输出电压幅值相同,电流自动平均分配。但由于寄生电阻R1,R2,R3阻值不同,导致各相输出电流失衡。在有源均流法中,均流环控制器产生占空比补偿分量ΔD对稳态占空比D进行校正,以实现电流均衡[14]。
1.2 占空比补偿
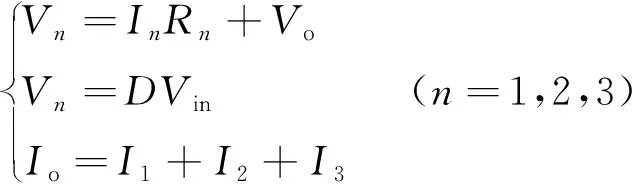
变换器在占空比补偿前、后分别工作在2个稳态点,忽略开关管通断损耗,等效电路如图2所示。占空比补偿前,由电压控制环路输出相同占空比D, 电路状态方程为:
(1)
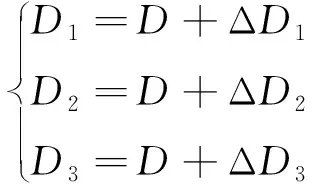
式中:Vn、In分别表示占空比补偿前每相输出等效电压和电流直流分量;Io表示总输出电流。

图2 占空比补偿前后稳态工作点等效电路
得到占空比补偿前,三相电感电路方程为:
I1R1=I2R2=I3R3
(2)
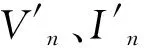
根据每相电流失衡情况,补偿所需占空比以获的新的稳态点,各相补偿占空比为:
(3)
式中:D1、D2、D3表示占空比补偿后各相占空比;ΔD1、ΔD2、ΔD3表示各相占空比补偿量。
占空比补偿后,总输出电流量不变,由电压控制环路输出的相同占空比加入补偿量,其电路状态方程为:
(4)
此时,由式(1)—(4)可以得到:
λ1(I3-I1)+λ1(I2-I1)
(5)
ΔD2=D2-D=λ2(I3-I2)+λ2(I1-I2)
(6)
ΔD3=D3-D=λ3(I1-I3)+λ3(I2-I3)
(7)
式中:λ1=R1/3Vin;λ2=R2/3Vin;λ3=R3/3Vin。
分析式(5)—(7)可知,三相占空比补偿量与寄生电阻、其他相平均电流有关。在传统有源均流法中,补偿量是通过测量每相电流,然后与均流母线参考值进行比较,最后通过电流反馈电路获得[15]。本文中通过输入电流重构相电流,根据重构相电流差异值得到补偿量,对三相中电压环控制器输出的稳态占空比进行实时校正。目前常用的数字控制器时钟频率高,理论最小分辨率能达到纳秒级别,非常容易对各相占空比进行监测和补偿,而不需测得实际相电流值和寄生电阻值,从而实现单电流传感器均流控制,降低阻抗失配影响,使功率、电流能平均分配。
根据式(5)—(7)可知,只需找到重构相电流与相电流平均值关系,即可得到ΔD1、ΔD2、ΔD3。
2 控制原理与设计
2.1 控制电路采样点
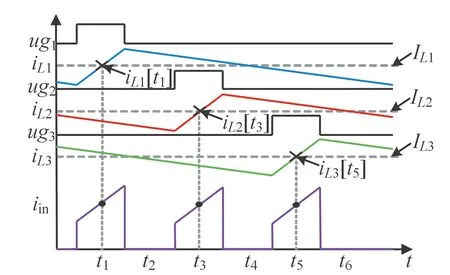
三相交错并联Buck变换器开关管驱动信号是根据调制波与相位交错120°的三角载波c1、c2、c3比较产生。在控制系统中,三角载波幅频恒定不变,因此可设置单电流传感器采样周期为单相开关管工作周期,采样周期根据3个载波分为6个采样点。6个采样点t1~t6分别对应3个载波的峰点和谷点,峰点、谷点又对应各相开关管关断、导通中点,如图3所示。此处驱动信号占空比D<1/3,三相开关管驱动信号分别是ug1、ug2、ug3。在单个采样周期内,能确保采样时间准确无误,间隔相等。
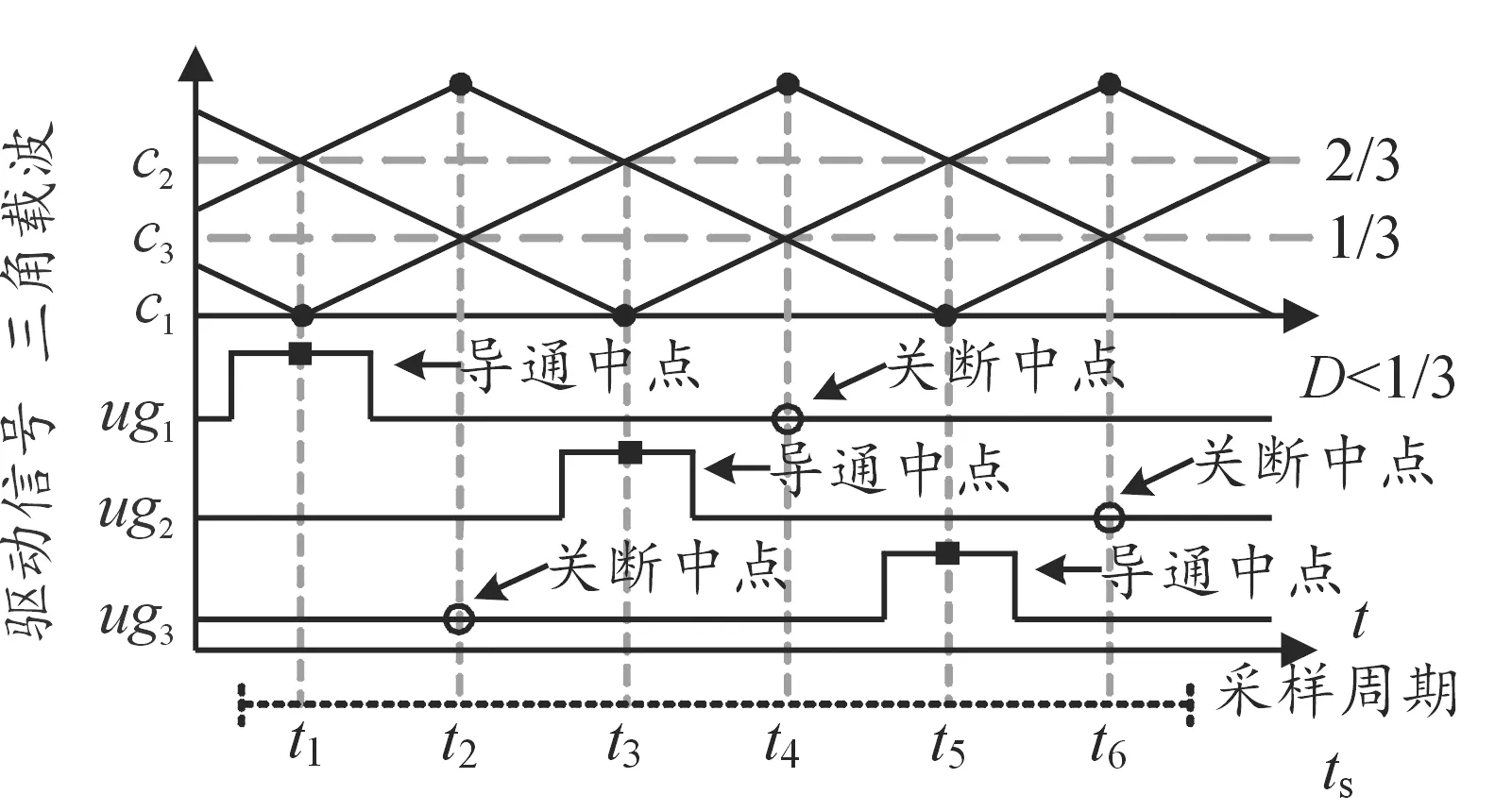
图3 采样点位置示意图
2.2 输入电流与相电流关系
在采样周期内,开关管S1、S2、S3的开关模态会因占空比不同而存在差异。为便于分析,定义开关管开关逻辑:导通为1,关断为0,则3个开关管开关逻辑有23种,但并不是每种开关逻辑都会同时在周期内出现。
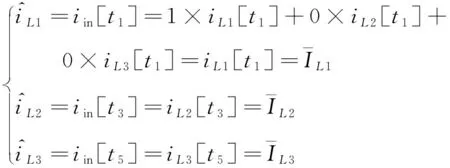
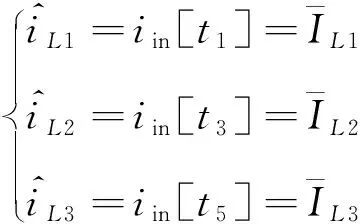
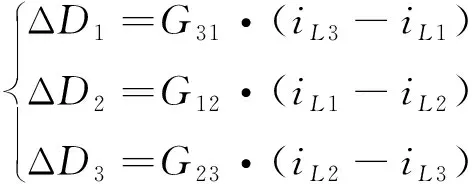
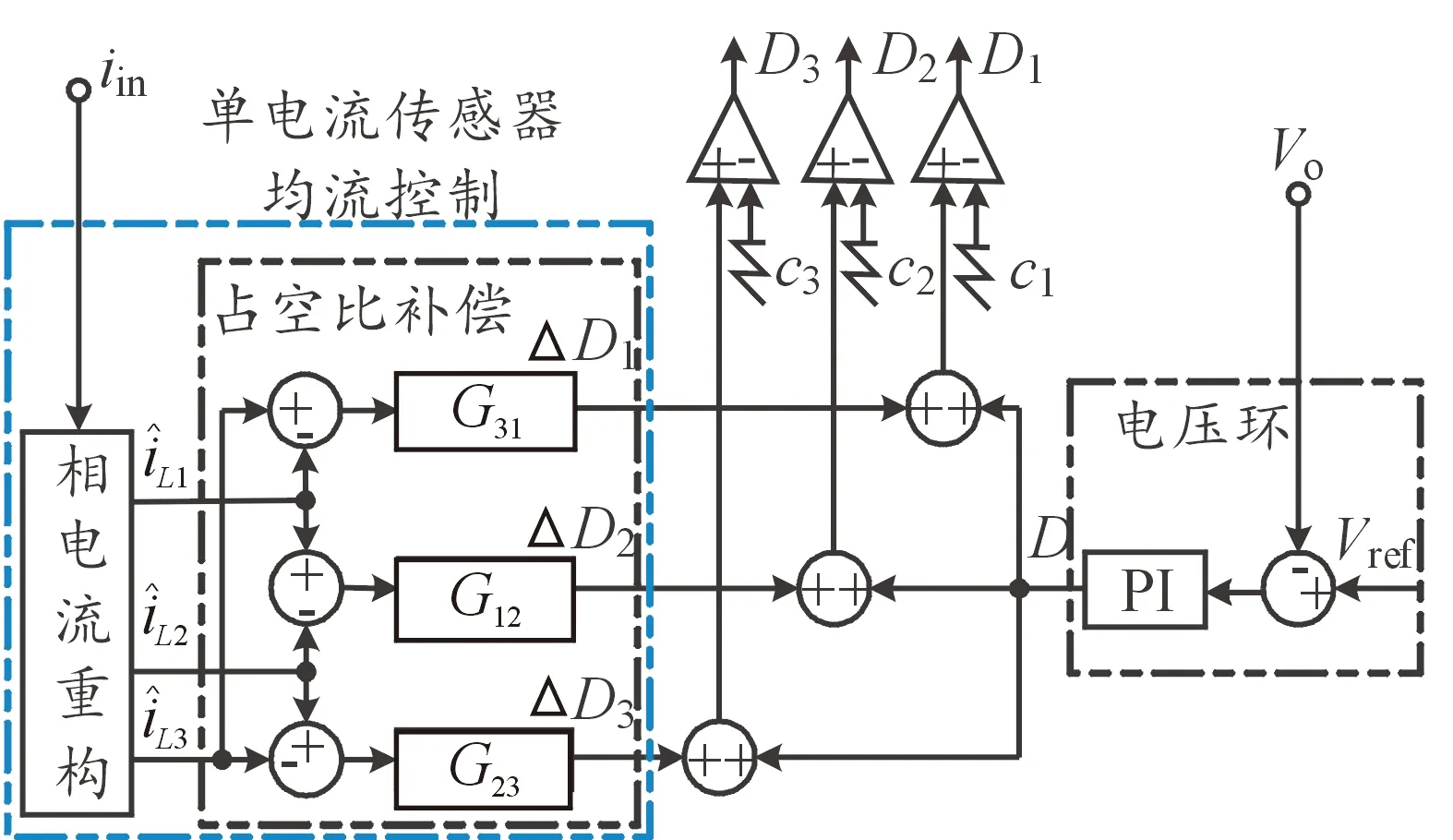
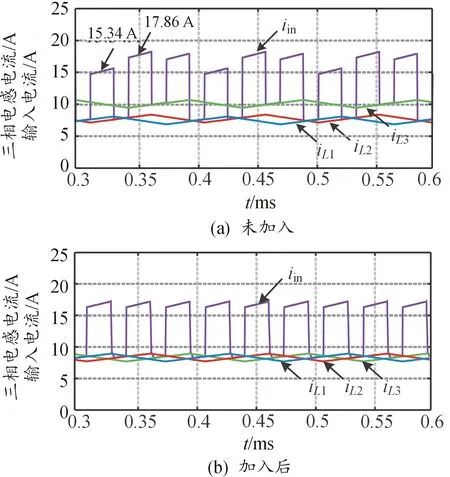
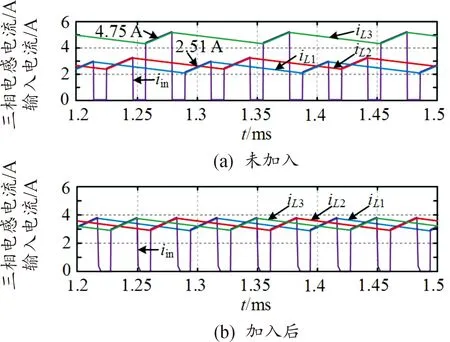
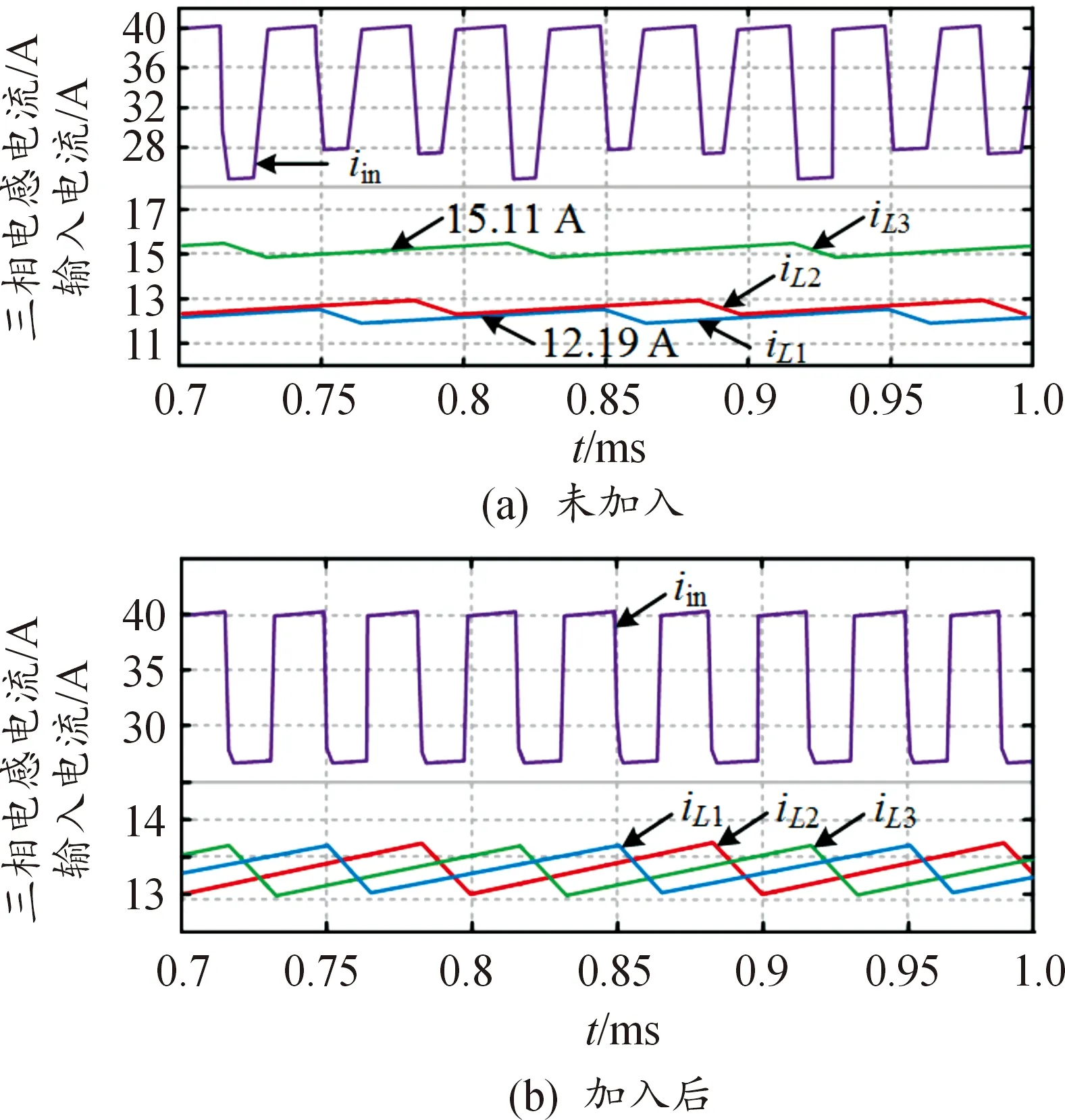
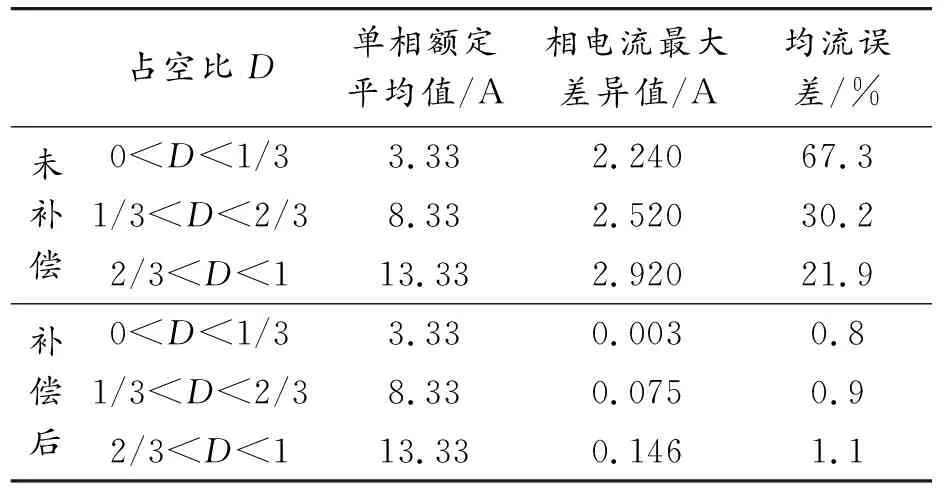
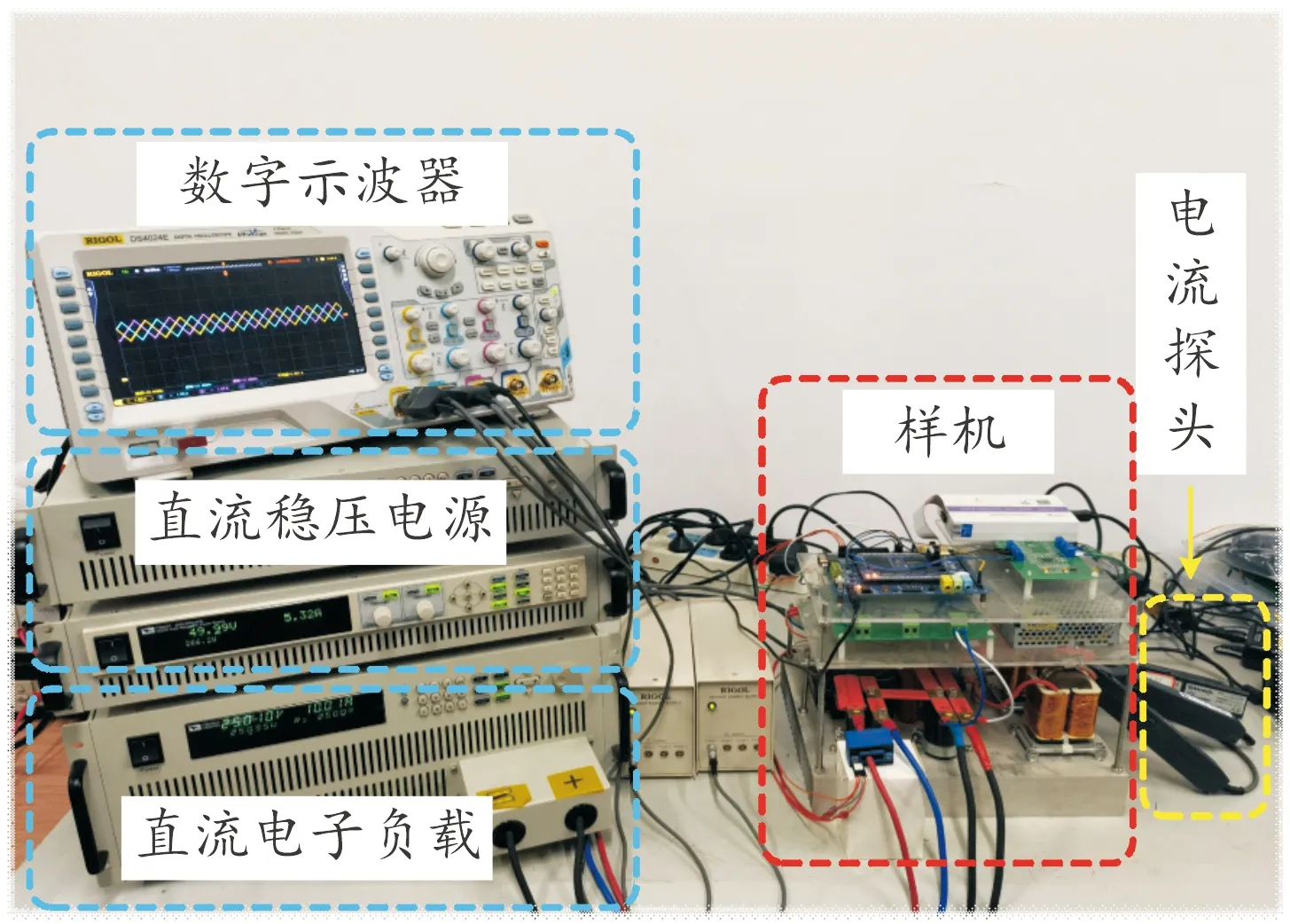
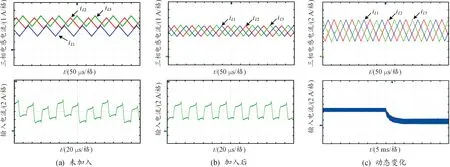
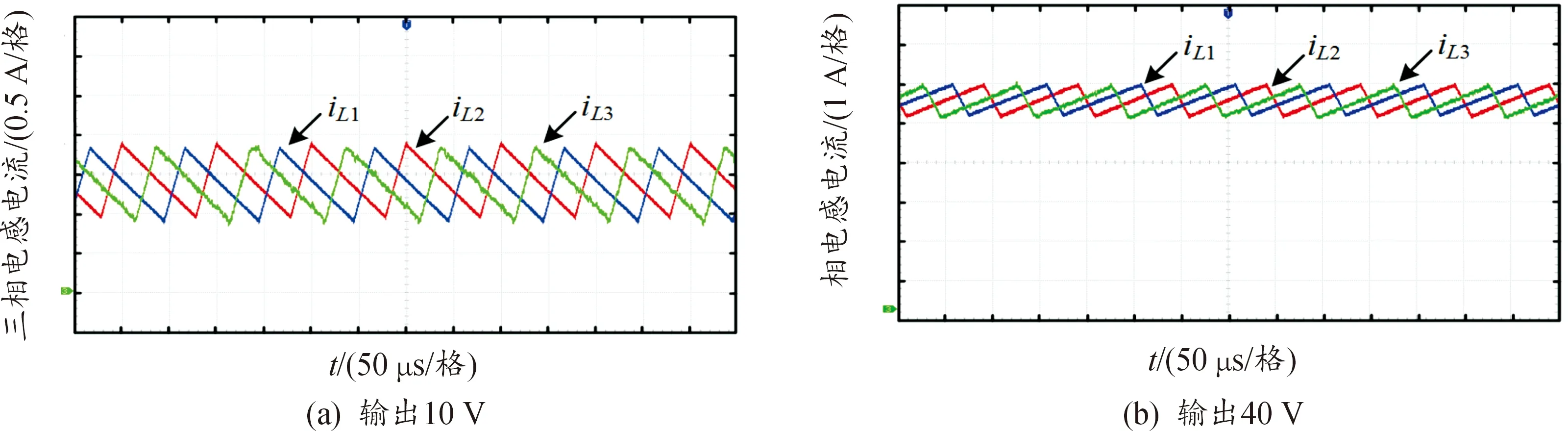
根据开关管同时导通条件,按照占空比分为3个区间:① 0 表1 采样点对应开关逻辑 通过对三相交错并联Buck变换器的模态分析,根据基尔霍夫电流定律可知:在任意时刻,输入电流等于流过3个开关管电流之和,此时输入电流与各相电流关系可表示为: iin[tm]=g1iL1[tm]+g2iL2[tm]+g3iL3[tm] m=1,2,3,4,5,6 (8) 式中:iin[tm]表示在采样点tm时刻的输入电流;iL1[tm]、iL2[tm]、iL3[tm]表示在采样点tm时刻的三相相电流;g1、g2、g3分别表示三相开关管在采样点tm时刻的开关逻辑。 由式(8)和表1可知,输入电流可根据开关逻辑用相电流表示,因此只需以输入电流作为中间量,就能找到重构相电流与相电流平均值的关系。 2.3.1各采样点相电流重构偏差之间的关系 为建立采样输入电流iin[tm]与相电流平均值之间的明确关系,引入相电流重构偏差ΔiLn。它表示在单个采样周期内,相邻2个采样点流过开关管相电流瞬时值iLn之间的差值: (9) 注意到,开关管导通时,三相电感的电路方程为: (10) 据此,可以得到相电流重构偏差ΔiL1、ΔiL2、ΔiL3分别为: (11) 因变换器工作在高频状态下,此时式(11)可简化为: ΔiL1≈ΔiL2≈ΔiL3 (12) 2.3.2重构相电流与相电流平均值关系 1) 当D<1/3时,单相开关管工作周期内3个开关管轮流导通,如图4所示。此时,输入电流断续。采样点t1、t3、t5时刻分别是开关管S1、S2、S3导通时间中点,采样值即相电流平均值。此时重构相电流可表示为: (13) 图4 D<1/3时电感电流和输入电流波形 考虑到采样点在采样周期平均分布,各相电流重构偏差关于自身相电流平均值对称,具体见图5。 2) 当1/3 图5 1/3 该状态下,三相重构相电流仍可用采样点t1、t3、t5时刻输入电流值,得到: (14) 3) 当D>2/3时,相开关管工作周期内开关管模态有2种状态:第1种是任意2个导通,另外1个关断;第2种是3个都导通(图6)。此时,输入电流连续,也分为2个等级,分别是采样点t1、t3、t5和t2、t4、t6时刻的输入电流值。要得到单个相电流,只靠采样点t1、t3、t5无法精准重构成平均电流。需要注意的是,在采样点t3时,开关管都导通,而采样点t4时刻只有开关管S1关断,此时可以利用2个连续采样点输入电流之间差值得到所求重构相电流。第二相和第三相重构相电流相等,可利用采样点t5与t6、t1与t2时刻输入电流值重构。此时,重构相电流表达式为: (15) 图6 2/3 通过上述对不同占空比区间下重构相电流和相电流平均值关系的分析,得出结论:在不同占空比下,重构相电流可以总是表示对应相电流平均值。 在2.2节中,根据式(5)—(7)可知:控制系统中,输入端需要2个比较器和1个补偿器,会使得三相控制变得复杂。注意到每相电流将以其余两相电流为参考进行跟随,则可以简化为只以一相电流作为参考量。因此,占空比补偿量可表示为: (16) 式中:G31、G12、G23表示三相占空比补偿网络系数。 由于单电流传感器均流控制模块原理是基于输入电流而重构相电流的差异值进行控制,因此它不受外部电压环路带宽的影响。根据2.3节分析,以设定的重构相电流对输入电流进行分点采样和提前存储,便可获得单相电流差异值,然后根据各相失衡情况更新各阶段占空比。系统整体控制策略示意图见图7。 图7 单电流传感器均流控制策略示意图 控制策略中,电压控制环路将为单电流传感器均流控制模块输出公共占空比D,占空比补偿模块根据重构相电流产生相应占空比补偿量。各相占空比的改变将导致其相电流发生改变,相电流变化也将引起下个周期占空比补偿量发生改变。G31、G12、G23为占空比模块校正系数,为等量补偿校正,可取相同值。使用简单比例补偿可快速实现占空比补偿,使三相电流趋于均衡,但会存在稳态误差;若稳态误差不在标准范围内,可加入积分补偿,但会降低均流速度。 为验证新控制策略的正确性,在Matlab中搭建仿真模型。模型尽可能模拟实际工程条件下的失衡状态。修改三相电感的寄生电阻和电感值, 变换器部分主要参数见表2。 表2 变换器部分主要参数 当输出电压为25 V(1/3 图8 1/3 当加入单电流传感器均流控制时,输入电流和三相电流波形如图8(b)所示。此时,虽然三相电流寄生参数仍不等,但在占空比补偿下,三相电流平均值相近,均流误差大幅减小,满足系统正常安全运行条件;系统动态性能良好,在负载突变(负载电阻减半)的情况下,相电流能在较短时间内稳定在额定值。电流纹波峰峰值约为1.25 A,与理论计算值相等(图9)。 图9 1/3 当输出电压为10 V(D<1/3)、40V(D>2/3)时,额定负载下,加入单电流传感器均流控制前后的输入电流和三相电流波形如图10、图11所示。未加入时,三相平均电流相差较大,系统额定电流越大,各相差异越明显。加入后,三相电流保持均衡,均流误差较小。 根据仿真结果可以发现,在宽输出范围(0 图10 D<1/3时,均流控制加入前后的电流波形 图11 D>2/3时,均流控制加入前后电流波形 表3 单电流传感器均流控制前后均流误差 综上,在每相寄生参数不等的情况下,各相电流会出现较大偏差,影响系统的正常运行,甚至在其他因素干扰下导致系统瘫痪;而使用单电流传感器均流控制能使各相电流均衡,达到使用标准,其稳态、动态性能较好,抗干扰能力较强。 为验证单电流传感器均流控制策略在实际工程中的可行性,搭建三相交错并联Buck变换器实验平台,如图12所示。 图12 实验平台实物照片 主控芯片采用TMS320F28335,功率器件采用PM300CLA060,电流传感器采用HAS50-S,电压传感器采用LV25P,输入输出参数与仿真设置一致。其他实验参数:L1=0.916 mH,R1=0.179 Ω,L2=0.906 mH,R2=0.150 Ω,L3=0.880 mH,R3=0.170 Ω,Co=220 μF,负载R=2.5 Ω。 图13表示在25 V(D=0.5)输出电压下,单电流传感器均流控制加入前后的输入电流和相电流波形。可以明显看出,在加入均流控制前,输入电流各峰值不相等,各相电流不均衡,均流误差较大。加入均流控制后,输入电流各峰值趋于相等,各相电流几乎无偏差,各相电流均衡在3.3 A处,均流误差小于2%;当负载从2.5 Ω变化为5 Ω时,三相电感电流动态变化及稳态波形如图13(c)所示,此时各相电流依然均衡。 图14表示在10 V(D=0.2)、40 V(D=0.8)输出电压下,均流控制加入后相电流波形。经分析发现,各相电流均衡,均流误差较小。根据实验波形,在输出电压稳定的情况下,单电流传感器均流法起到了很好的均流效果,在全占空比下,均流误差满足设计要求。 图13 25 V输出电压下,均流控制加入前后的电流波形 图14 10 V和40 V输出电压下,均流控制加入后的相电流波形 1) 占空比补偿量与各相平均电流有关; 2) 通过输入电流重构的相电流,其值与实际各相平均电流相等; 3) 在仅使用电压控制环路、1个电流传感器的基础上,均流控制模块能产生相应占空比补偿量,实现各相电流均衡。 仿真与实验结果均验证了单电流传感器均流控制策略的正确性和可行性。在良好均流效果的前提下,保证了系统的动态性能。所提出的控制策略可拓展到其他多相并联变换器控制中。
2.3 相电流重构




2.4 控制系统设计
3 仿真与实验
3.1 仿真验证


3.2 实验验证
4 结论
猜你喜欢
电工技术学报(2022年20期)2022-10-29汽车零部件(2022年7期)2022-08-03电子技术与软件工程(2022年6期)2022-07-07汽车与驾驶维修(维修版)(2020年2期)2020-01-07智富时代(2018年3期)2018-06-11智富时代(2018年3期)2018-06-11电机与控制学报(2018年9期)2018-05-14现代电子技术(2009年8期)2009-06-25
