
考虑工况识别的燃料电池客车能量管理策略研究
2022-06-18 02:13王琳皓李惠林边东生
重庆理工大学学报(自然科学) 2022年5期
王琳皓,何 锋,李惠林,边东生
(1.贵州大学 机械工程学院, 贵阳 550025; 2.奇瑞万达贵州客车股份有限公司, 贵阳 550025)
0 引言
燃料电池汽车作为未来新能源汽车的发展趋势,具有零排放、噪声低等优点[1-6]。目前,采用燃料电池和动力电池双动力源的客车可以有效弥补燃料电池单一能量源无法回收制动能量、启动时间长等缺点。对于双动力源燃料电池客车,制定能使燃料电池和动力电池功率分配合理的能量管理策略尤其重要。
近年来,许多学者[7-10]将工况识别应用于能量管理策略中,能够有效改善汽车的燃料经济性和延长动力电池的寿命。白书杰等[11]以典型工况的速度曲线为训练样本,建立了遗传算法优化BP神经网络工况识别器,以此来识别汽车行驶工况;田毅等[12]采用模糊神经网络的工况识别方法,识别广州和上海的主干道行驶工况;赵剑[13]依据k-means聚类算法的原理,通过计算欧几里得贴进度大小,实现工况识别;石琴等[14]利用粒子群优化支持向量机算法对实车采集的行驶工况进行识别。其中,神经网络需要大量的训练数据,增大操作难度,降低工况识别精度;模糊控制器的隶属度函数依据主观意向设计,无法保证识别精度;聚类算法中输入参数的个数和聚类中心初始值对识别精度影响很大,容易陷入局部最优。支持向量机(SVM)算法简单,对异常值不敏感,被广泛应用于分类识别等问题。
为了提高工况识别精度,利用GWO算法优化支持向量机,建立最优工况识别模型,将其应用于燃料电池客车能量管理策略中。通过Matlab/Simulink和Cruise联合仿真,分析所提出的能量管理策略的车速跟随情况、动力电池SOC变化曲线和整车等效氢耗量。
1 燃料电池客车动力系统结构及整车参数
以某型燃料电池客车为研究对象,其动力系统结构如图1所示,燃料电池系统和锂电池组是燃料电池客车的能量源,DC/DC燃料电池转换器起到调控燃料电池的输出电压和输出功率的作用。整车主要参数如表1所示。
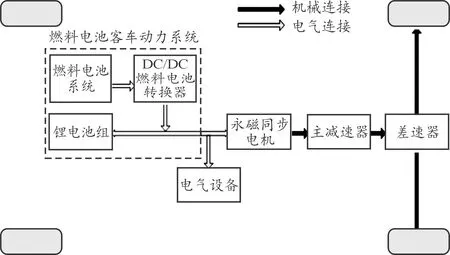
图1 燃料电池客车动力系统结构示意图

表1 整车主要参数
2 基于GWO-SVM的工况识别
2.1 基于GWO-SVM的识别算法
根据支持向量机(SVM)原理,惩罚参数c和核函数参数g是影响SVM识别精度的主要因素,通常采用交叉验证(cross validation,CV)法寻找一定范围内最优的c和g。
灰狼优化算法(GWO)模拟灰狼种群捕食活动,具有收敛速度快、结构简单和易实现等优点[15-16]。为了解决传统交叉验证法优化支持向量机(CV-SVM)存在的计算繁杂、识别精度差等问题,将灰狼优化算法与支持向量机相结合,提出GWO-SVM识别算法,其流程如图2所示。

图2 GWO-SVM算法流程框图
GWO-SVM算法的基本步骤如下:
1) 样本处理及特征参数计算,设置c和g的取值范围。
2) 初始化灰狼种群,计算灰狼个体的适应度函数值,确定α、β、δ狼的位置,适应度函数为
(1)
式中:f(x)为适应度函数;R(n)为行驶工况识别结果;A(n)实际行驶工况类型;i为测试样本数量。
3) 根据式(2)—(5)更新当前灰狼的位置及a、A、C。
A=2ar1-a
(2)
C=2r2
(3)
D=|Cxp(t)-xi(t)|
(4)
xi(t+1)=xp(t)-AD
(5)
式中:r1、r2为[0,1]中的随机向量;a在迭代过程中线性地由2减小到0;A和C是协同系数向量;xp表示猎物的位置向量;xi表示当前灰狼的位置向量;t为迭代次数。
4) 计算全部灰狼个体的适应度函数值,更新α,β,δ狼的位置。
5) 判断是否达到最大迭代次数,若未达到,则返回第3)步;若达到,则输出最小适应度函数值,所对应α狼的位置坐标即为最优的c和g。
6)根据得到的最优c和g,建立SVM识别模型,得出识别结果。
其中,GWO-SVM工况识别算法需要的调节参数较少,使其运算量减少,收敛速度快;而交叉验证优化支持向量机是在2的指数范围网格内查找最优的c和g,计算量较大且费时。
2.2 工况选择及样本处理
以中国重型商用车-客车工况(CHTC-C)中市区、郊区和高速3种工况为标准工况,3种工况的速度曲线如图3。
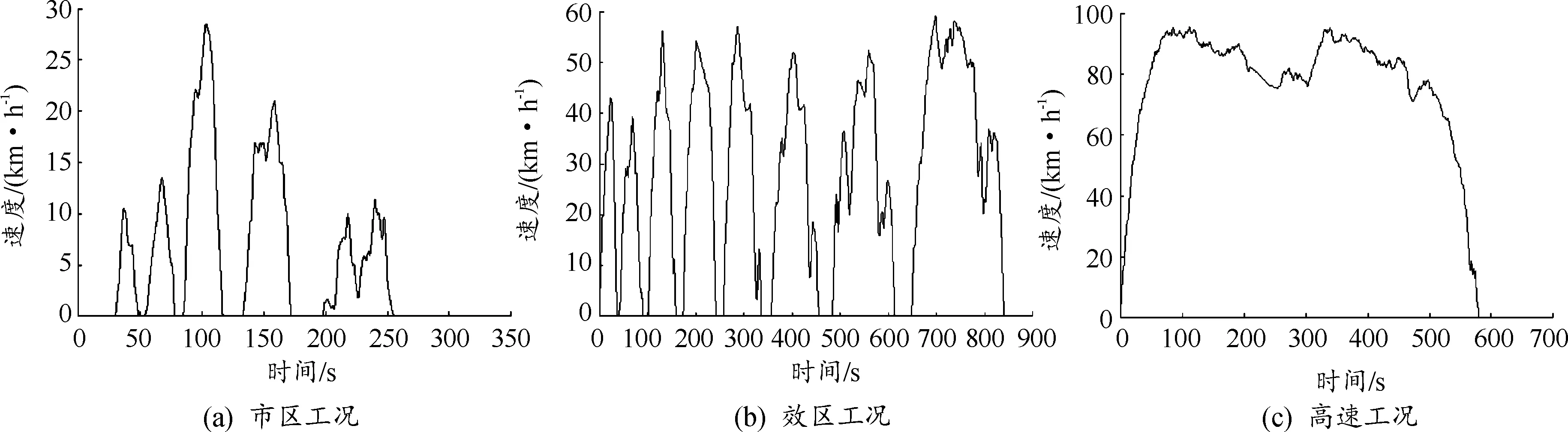
图3 CHTC-C工况曲线
为使样本充足,采取随机数法抽取样本,其中每组样本时长120 s,即识别周期为120 s,具体划分如图4所示。每类标准工况划分150组数据样本,共450组数据样本,样本随机划分的起始时刻T0取值为
T0=(T-ΔT)rand(0,1)
(6)
式中:rand(0,1)为(0,1)之间产生的随机数;T0为样本随机划分的起始时刻;ΔT为工况识别周期;Δt为工况更新周期。

图4 样本数据划分曲线
特征参数的选择是准确识别行驶工况的关键,代表行驶工况的特征。特征参数选择过多则计算量繁多影响工况识别速度,而选择过少则无法表征某一行驶工况,影响工况识别精度。根据相关学者的研究[14,17],选择减速比例、加速比例和匀速比例作为工况识别的特征参数,利用Matlab编程计算以上3种标准工况的特征参数,如表2所示。

表2 CHTC-C城市、郊区和高速工况特征参数 %
3种标准工况被划分为450组数据样本工况,其中80%作为训练集,20%作为测试集,采用灰狼优化算法对支持向量机进行优化,获取最佳的惩罚参数c和核函数参数g。
分别使用灰狼优化算法和交叉验证方法优化支持向量机,2种工况识别算法的寻优过程如图5所示。其中,GWO-SVM算法寻得最佳参数的识别精度为96.666 7%,对应的最优惩罚参数为42.478,最优核函数参数为74.243 2;交叉验证优化支持向量机寻优过程中的最佳精度为 92.222 2%,对应的最优惩罚参数为256,最优核函数参数为4。GWO-SVM工况识别算法相比于交叉验证优化支持向量机方法识别精度提高了4.444 5%,验证了GWO-SVM工况识别算法的有效性和优越性。
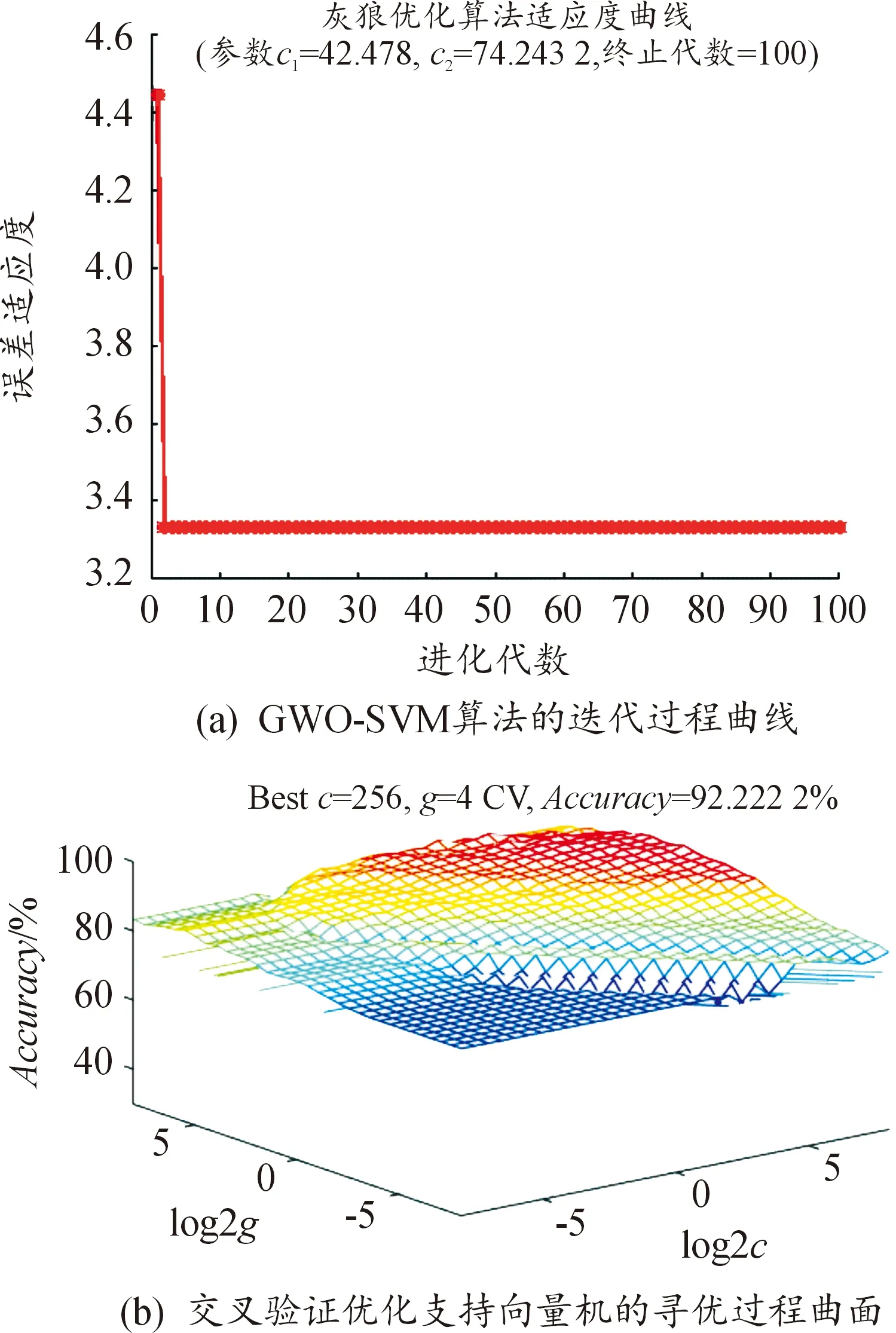
图5 2种工况识别算法的寻优过程
3 识别周期及更新周期对识别精度的影响
在样本划分过程中,识别周期ΔT和更新周期Δt对识别精度影响很大,计算ΔT内的特征参数即可识别Δt内的工况类别。ΔT过大使数据增多,不利于计算;ΔT过小使特征参数信息不全面,最终识别结果变差。Δt过大不利于工况及时切换;Δt过小则会使工况切换频繁,能量管理控制器负担过重。因此,选择合适的ΔT和Δt尤其重要。
取若干标准工况片段组合成一个共1 800 s的复杂工况,其速度曲线见图6所示,分别选用ΔT=60、90、120、150 s抽取样本,Δt=6、9、12、15 s更新样本划分周期,利用GWO-SVM工况识别算法对复杂工况进行识别。
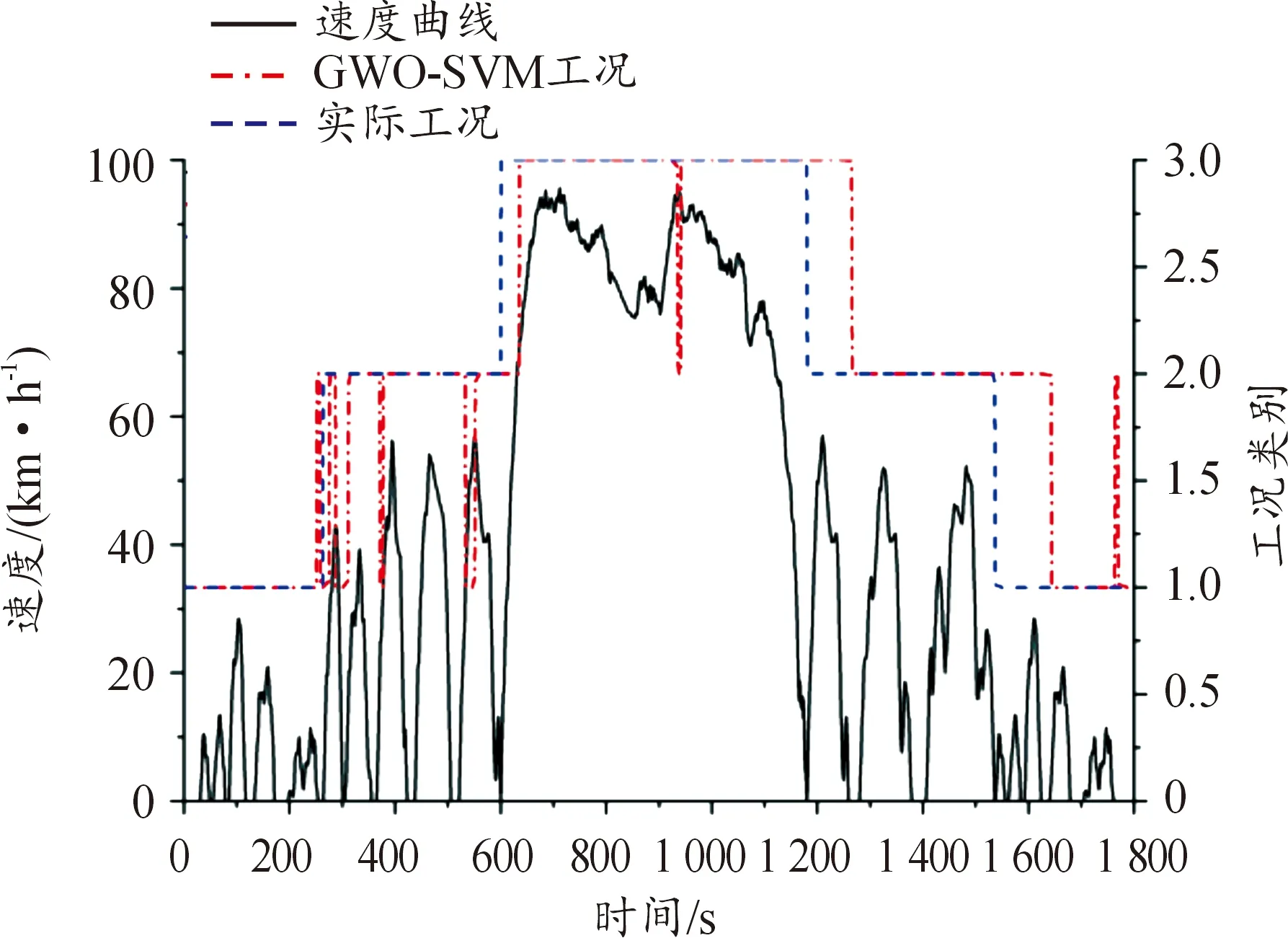
图6 ΔT=120 s,Δt=6 s时客车复杂工况识别速度曲线
不同ΔT、Δt的识别结果准确率如表3所示。当更新周期Δt不变时,识别周期ΔT由60 s增大至120 s,其工况识别准确率逐渐增大,但是当ΔT继续增大至150 s时工况识别准确率反而下降;当ΔT为120 s时,Δt为6 s时其工况识别准确率最高。

表3 不同ΔT、Δt的识别结果准确率 %
识别周期ΔT=120 s,更新周期Δt=6 s时客车复杂工况识别结果如图6所示,由于存在识别周期,在实际工况分界处,GWO-SVM工况识别结果会出现一定程度的延迟,在其余时间段工况识别错误较少。因此可使用ΔT=120 s,Δt=6 s对客车行驶工况进行在线识别。
4 基于工况识别的能量管理策略
针对市区、郊区和高速3种工况,设计3个模糊控制器,联合GWO-SVM算法在线识别工况,实时切换模糊控制器。为降低燃料电池客车等效氢耗量,利用灰狼优化算法对模糊控制器的隶属度函数进行优化。
4.1 模糊控制器设计
选取燃料电池客车电机需求功率Preq和动力电池SOC为模糊控制器输入变量,以燃料电池输出功率Pfc为输出变量。根据客车相关参数及市区、郊区和高速3种标准工况的速度曲线,可计算3种工况下电机的最大需求功率,在市区工况下,燃料电池客车电机需求功率不超过12 kW,故模糊控制器的输入变量Preq变化范围设定为[0,12],模糊子集为{VL,L,M,H,VH};SOC变化范围设定为[0,1],模糊子集为{L,M,H};考虑到燃料电池的功率在5~40 kW范围内效率较高,因此输出变量Pfc变化范围设定为[5,12],模糊子集为{VL,L,M,H,VH}。
在郊区工况下,燃料电池客车电机需求功率不超过40 kW;在高速工况下,燃料电池客车电机需求功率不超过90 kW。其他2种工况的输入变量与输出变量设置与市区工况下类似,不再描述。
4.2 模糊控制器优化
上述模糊控制器设计过程中,模糊规则是依据大量经验设计,而隶属度函数依据主观意向设计,为使燃料电池客车获得最佳的性能,需要对隶属度函数进行优化。
采用GWO算法优化模糊控制器的隶属度函数,在保证客车动力性的前提下,使整车等效氢耗量达到最小。目标函数为燃料电池的氢耗量和动力电池的等效氢耗量之和,为[18]:
(7)
其约束条件为:

(8)
式中:obj(t)为客车的等效氢消耗量;Hfc为燃料电池的氢消耗量;Ibat为动力电池的工作电流;Ubat为动力电池的工作电压;Ifc为燃料电池的工作电流;Ufc为燃料电池的工作电压;t为汽车行驶时间;Pload为汽车需求功率;Pfc为燃料电池的输出功率;Pbat为动力电池的输出功率;SOCmin、SOCmax分别为动力电池SOC的最小值和最大值。
优化前后燃料电池输出功率曲面的变化如图7所示。当SOC较高、Preq较低时,优化后的Pfc减小,此时燃料电池起辅助作用;当SOC较低、Preq较高时,优化后的Pfc增大,此时燃料电池是主动力源。优化后的模糊控制器能充分利用双动力源的能量,有效降低整车等效氢耗量。郊区和高速工况模糊控制器与市区模糊控制器优化方法相同,优化结果不再列出。
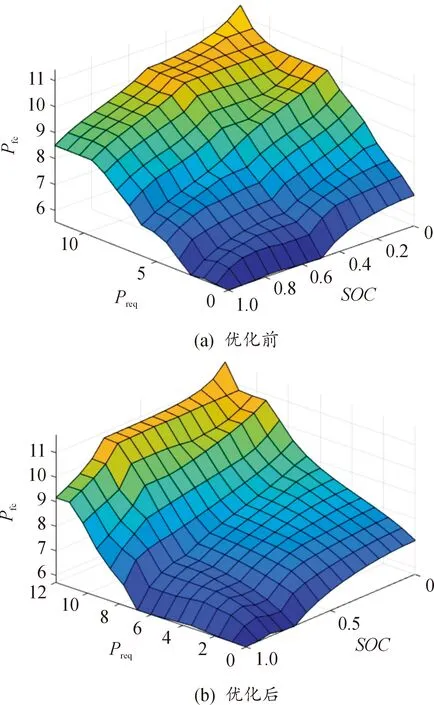
图7 优化前后燃料电池输出功率曲面
5 仿真实验
在Cruise中建立燃料电池客车整车模型如图8所示,在Matlab/Simulink中搭建能量管理策略,并通过interface模块进行联合仿真。

图8 燃料电池客车整车模型示意图
针对随机组合的1 800 s复杂工况,分别采用无工况识别、CV-SVM工况识别和GWO-SVM工况识别3种能量管理策略进行仿真分析,仿真时设置动力电池初始SOC为60%,上限为80%,下限为40%。
3种控制策略的功率分配如图9所示,与无工况识别能量管理策略相比,基于工况识别能量管理策略的燃料电池输出功率根据工况类别不同而呈现出分层变化趋势,且变化平稳。其中GWO-SVM工况识别精度较高,燃料电池的输出功率变化更平稳,能够有效提高燃料电池的工作效率。

图9 3种控制策略的功率分配
跟随目标车速如图10所示,不同策略下的实际车速与目标车速基本保持一致,客车的加速能力也表现良好。

图10 跟随目标车速曲线
动力电池SOC变化曲线如图11,3种策略下SOC都在40%~80%变化范围内,满足要求。在复杂工况的前600 s和后600 s是市区工况和郊区工况,SOC会呈现一定的上升趋势,而工况识别能量管理策略动力电池SOC相比于无工况识别能量管理策略动力电池SOC变化幅度明显变小,充放电次数减少,有利于延长动力电池的寿命。

图11 动力电池SOC变化曲线
整车等效氢耗量如图12所示,GWO-SVM工况识别能量管理策略的整车等效氢耗量约为 0.517 kg,无工况识别能量策略整车等效氢耗量约为0.590 kg,CV-SVM工况识别能量管理策略整车等效氢耗量约为0.530 kg,本文中提出的模糊控制策略整车氢耗量相比于另外2种策略分别下降12.37%和2.45%,能有效改善燃料电池客车燃料经济性。
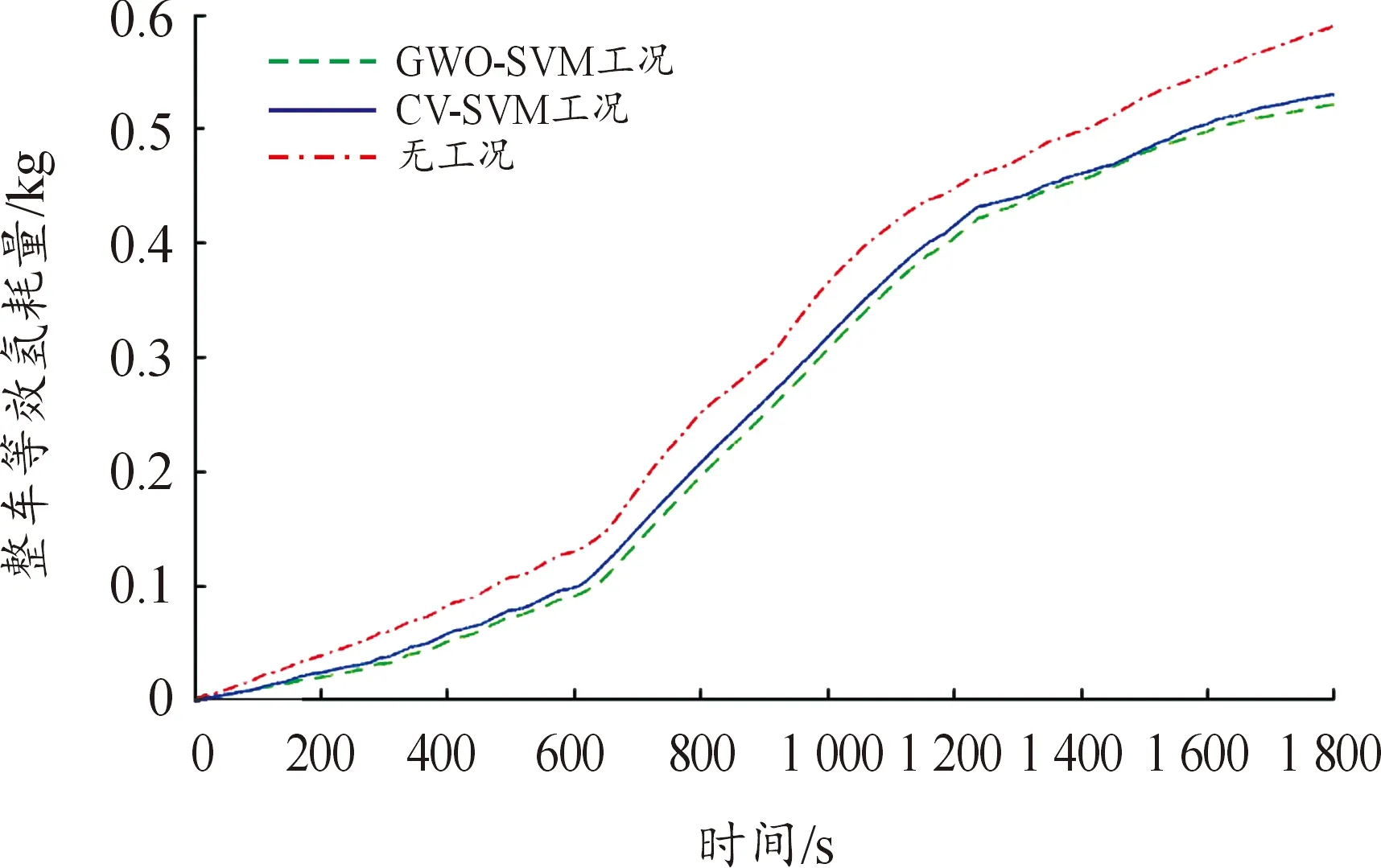
图12 燃料电池客车整车等效氢耗量曲线
6 结论
1) 以中国重型商用车-客车工况(CHTC-C)中市区、郊区和高速3种工况为标准工况,提出GWO-SVM工况识别算法,比CV-SVM工况识别算法识别精度提高了4.444 5%。
2) 比较4种不同识别周期和更新周期下的工况识别精度,得到识别周期为120 s、更新周期为6 s时,工况识别精度最高的结论。
3) 将GWO-SVM工况识别算法应用于能量管理策略中,结果表明,燃料电池客车的车速跟随良好,满足其动力性要求;动力电池SOC变化更加平稳,充放电次数减少,有利于延长动力电池寿命;整车等效氢耗量减少,能提高客车的燃料经济性。
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年16期)2022-09-03
汽车实用技术(2022年10期)2022-06-09
小学阅读指南·低年级版(2021年3期)2021-03-19
小太阳画报(2019年1期)2019-06-11
数学大王·低年级(2018年5期)2018-11-01
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
分析化学(2017年12期)2017-12-25
快乐作文·低年级(2017年3期)2017-03-25
