
安川H1000变频器在双电机同步控制中的技术方案研究
2016-12-30 02:24周永亮
自动化仪表 2016年12期
周永亮
(广州电缆厂有限公司,广东 广州 510000)
安川H1000变频器在双电机同步控制中的技术方案研究
周永亮
(广州电缆厂有限公司,广东 广州 510000)
针对传统同步方法控制下双牵引电机同步运行所出现的问题,提出了频率相对值跟随的方法。通过设置前后牵引变频器的正反向运行的增益、使用指令指定切换端口,使前牵引电机跟随后牵引电机。对比新的跟随速差法和传统的固定速差法,新的跟随控制方法克服了开关过程中的不平滑和两牵引电机间电缆上张力突变的不足,在高、中、低速档中表现出良好的动态性能。该方法提高了产品的质量,增强了系统的灵活性,提升了设备的生产效率,具有借鉴和推广意义。
变频器 双电机 牵引 同步控制 动态性能 可靠性 张力
0 引言
安川H1000变频器是安川继A系、F系、V系之后开发的又一款重载高性能矢量变频器产品。与A1000相比,H1000拥有更高的效率和过负荷能力。相对G7、F7、V7而言,H1000在控制方式上的性能更高、适用范围更广、控制精度提升、机械性能更高,拥有种类更多且更大的制动转矩。与以前及同类变频器相比,H1000内置多种学习方式,无论是驱动感应电机或是同步电机,都能充分发挥其驱动性能。
H1000作为安川系列的新产品,具有更多的多段速选择端子。丰富的多功能输入端子和在多速度、多电机的控制领域,能够实现智能启动,并更加灵活地实现主从调速、控制转换,在复杂工业过程参数优化方法[1]、主从电机同步的应用中具有显著的优势。
1 工程分析
双履带牵引在运行时,几乎不受放线盘动平衡误差的影响,把放线和收线的冲击干扰因素排除在两牵引之外。由于受到电机的转差率、带轮精度、带厚精度等因素的影响,两台牵引输出的线速度会存在差异。
当前牵引线速度大于后牵引线速度时,线缆下挠松垮,并逐渐累积,直至不能正常稳定运行;当后牵引线速度大于前牵引时,线缆就会出现张力,张力越大,线缆就会崩得越紧。在张力过大时,本来正常运行的前牵引被后牵引通过线缆拽动,会产生失速超压,甚至出现保护停机。
从控制方式上来看,前牵引釆用速度稳定控制方式,为生产线提供了稳定的线速度;后牵引釆用力矩控制方式,即限制电动机的运行电流,使后牵引电机运行在弱励磁状态[2-3]。
当外负载大于电机输出力矩时,电机转速因被堵转而下降,电流增大,直至满足电机设定电流为止。所以在生产操作时,通过设定不同的限制电流值,便可以产生不同的张力。
2 技术方案与实例
当生产中只需要使用一个牵引时,应以后牵引为主牵引。传统的技术方案为:在电缆的生产中,电缆挤塑机的牵引主机启动后,当主机正向运行时,在后牵引电机的控制变频器上设置一个超前的速度差,其值为5 Hz;在H1000的多功能输入端口,以继电器的动断触点作为前、后牵引速度差切入与撤消的闸门;当选择倒车时,断电器的动断触点动作断开,前、后牵引的速度差被撤消[4],从而实现前、后牵引的等速运行。
传统前后牵引同步控制流程图如图1所示。
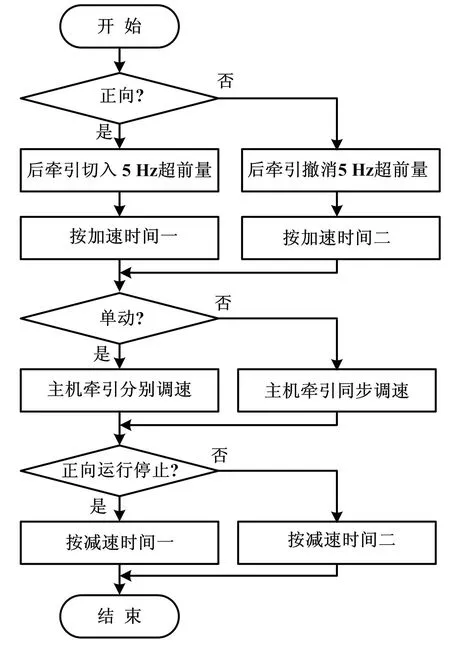
图1 传统前后牵引同步控制流程图
Fig.1 Flowchart of the traditional front and rear traction synchronous control
在规格一定的电缆生产运行中,牵引完成了生产工艺的同步性要求,但仍存在着以下两方面的主要缺陷。
①后牵引电机变频器采用5 Hz的速度超前预置值,此控制方案下,运行一段时间后会经常发生过电流误报警动作。
在启动开关的开合过程中,由于外接电机、继电器等感性负载,会给变频器的电流检测回路带来冲击性的浪涌电流[5-6],检测回路灵敏度因振荡电流的冲击下降,使变频器产生过电流误保护动作,同时缩短了回路中检测电感的寿命。
对变频器检测回路建立了电路模型,并给出数值计算分析。电流检测回路的电路模型如图2所示。

图2 电流检测回路的电流模型
Fig.2 Current model of the circuit detection loop
由基尔霍夫电压和电流定律得[7-8]:
(1)
(2)
式中:参数L=50 μH;C=2×10-3F;R=2×10-3Ω。
将这些参数代入式(1)、式(2),并整理得:
特征方程为:
p2+40p+107=0
特征值为:
p1=-20+j 3 162.214
p2=-20-j 3 162.214
所以:
uC=Kue-20tsin(3 162.214t+θu)
(3)
iL=Kie-20tsin(3 162.214t+θi)
(4)
电容电压初始条件为:
uC(0+)=uC(0-)=500 V
将初始条件代入式(3),得:
Kusinθu=500×
[-20Kue-20tsin(3 162.214t+θu)+
3 162.214Kue-20tcos(3 162.214t+θu)]t=0=0
所以:
Kusinθu=500
Kucosθu=31.623
uc=500.99e-20tsin(3 162.214t+86.38°) V
(5)
电感电流的初始条件为:
iL(0+)=iL(0-)=0
将初始条件代入式(4),得:
Kisinθi=0
[-20Kie-20tsin(3 162.214t+θi)+
93 162.214Kie-20tcos(3 162.214t+θi)]t=0
所以:
Kisinθi=0
-20Kisinθi+3 162.214Kicosθi=107
iL(t)=3 162.341e-20tsin(3 162.214t)A
(6)
由此可知,流过电感的电流是振荡衰减的浪涌电流。
当电容初始储能释放到零后,即电容电压在过零变负时,电感中的电流iL可达到最大值。设对应的时间和电流分别为tmax、tLmax,将uc(tmax)=0代入式(5),则:
500.99e-20tmaxsin(3 162.214tmax+86.38°)=0
tmax=0.029 6 s
将tmax=0.029 6 s代入式(6),可得:
iLmax=3 162.314 e-20×0.029 6sin(3 162.214× 0.029 6)=1 745.999 A
以下进一步利用OrCAD中的PSpiceA/D仿真组件进行电感电流波形的仿真,仿真的电流波形如图3所示。
由图3可知,使用传统技术方案,变频器检测回路的检测电感的灵敏度会随着使用时间的增加而下降,到后期会经常发生过电流误报警动作。
②电缆在降速生产时电缆中的张力会剧烈地上升,在由大线转成小线或进行双牵引倒线时,都需降低牵引速度。而降低牵引速度会引起电缆中张力的陡升,很容易拉断电缆线。要找出产生缺陷的原因,就需要仔细分析预置固定速度差与电缆中张力变化规律之间的关系。
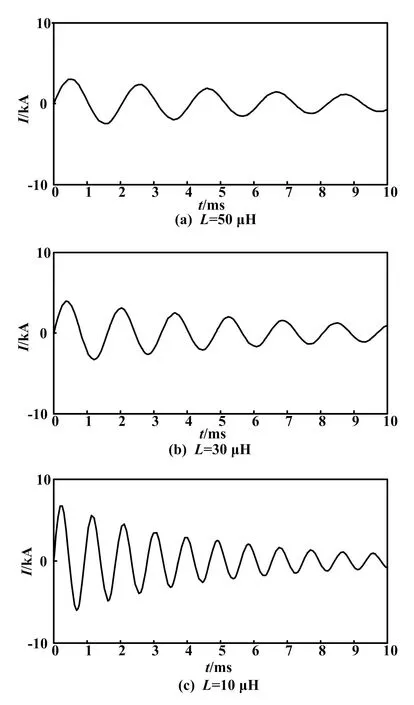
图3 电感电流波形图
Fig.3 Waveform of inductive current
由上面三个状态可发现,在5 Hz的预置固定速度差的控制下,当牵引速度降低时,电缆中张力会剧烈地上升。由此解释了在此种控制方式下,电缆时常拉断的原因:在由大线转成小线或进行双牵引倒线时,都需降低牵引速度,而降低牵引速度会引起电缆中张力的陡升,很容易拉断线。
技术方案力求在现有设备、原料和工艺流程不变的情况下,通过对过程操作参数的优化,提高产品的合格率、降低过程的资源消耗[9]。
通过对安川变频器的多功能输入/输出端子和高级设定代码的进一步探究发现,安川的某些多功能输入端子通过对应的通道口设定,可与对应的模拟量输入端子相关联。在电机运行时,H1000首选的模拟量输入口为A1口,在反转时可通过接通相应的多功能输入端,使电压模拟量从输入口A1切换到对应的模拟量输入口。
以本公司的精铁120双履带牵引电缆挤塑机为例,方法如下:正转运行时,使前牵引跟随后牵引,控制前后牵引的上限最大频率相对值,并以6%(由试验获得)的稳定速度差实现零频率平滑起动;将后牵引变频器的多功能端子S2通过通道口设定为牵引反转输入信号,并将此功能端子与多功能输入端子S5短接;将S5端子设定为多段速指令功能,并将模拟量端子A1与A2短接。反转时,S5接通,则变频器模拟量输入从A1口切换至A2口。在两牵引反转运行时,调节A2口的增益,观察两变频器的运行频率,通过调节与观察直至两变频器的输出频率相等(该精铁120挤塑机的增益调为94.7%),即使得反转时两牵引由不等速切换至等速,实现倒车时前、后牵引的等速运行。
当加速运行时,后牵引的加速时间应小于前牵引的加速时间; 当减速运行时,后牵引的减速时间应大于前牵引的减速时间。改进后前后牵引同步控制设计流程图如图4所示。
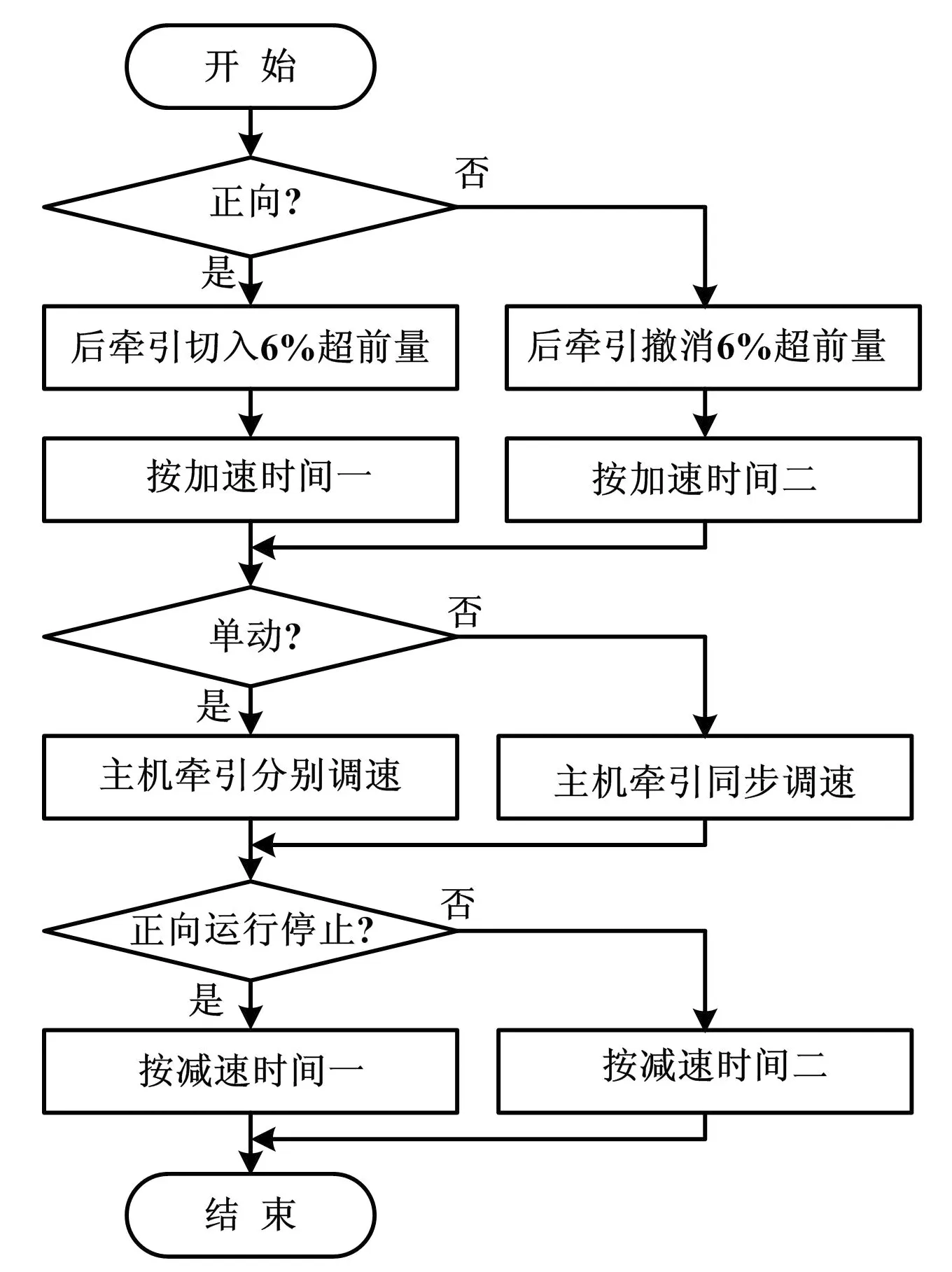
图4 改进后前后牵引同步控制流程图
Dig.4 Flowchart of the improved front and rear traction synchronous control
3 改进前后的效果对比
在实际生产中,分别观察和记录了改进前后同步控制下速度、频率的值,并计算对应的频率变化率,得到表1、表2。从改造前后运行参数表中提取速度和张力大小百分比(频率变化率),可得到频率变化率与生产速度关系如图5所示。
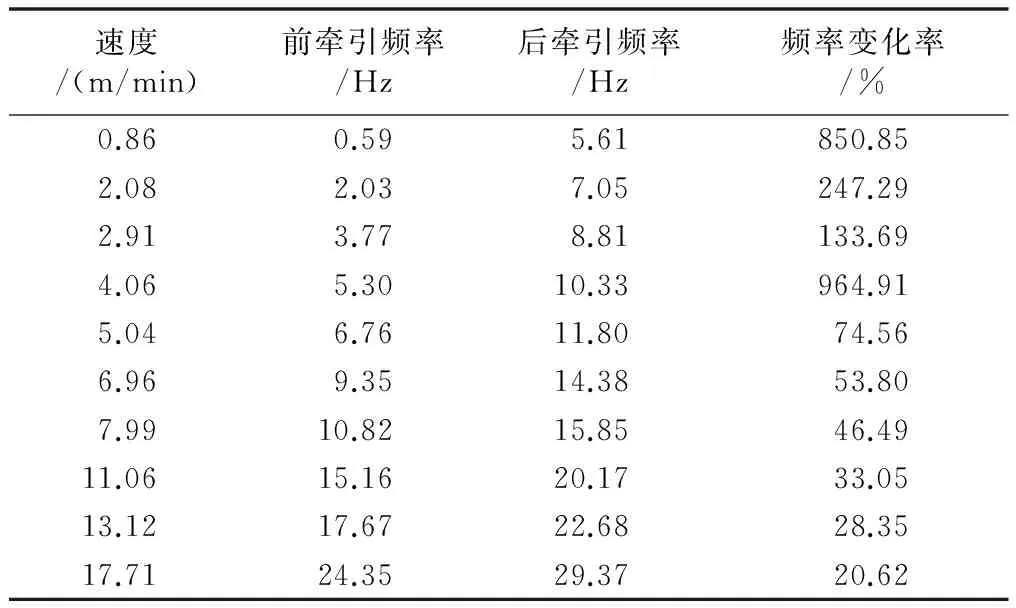
表1 传统方案同步控制中的运行参数Tab.1 The operating parameters of traditional synchronous control
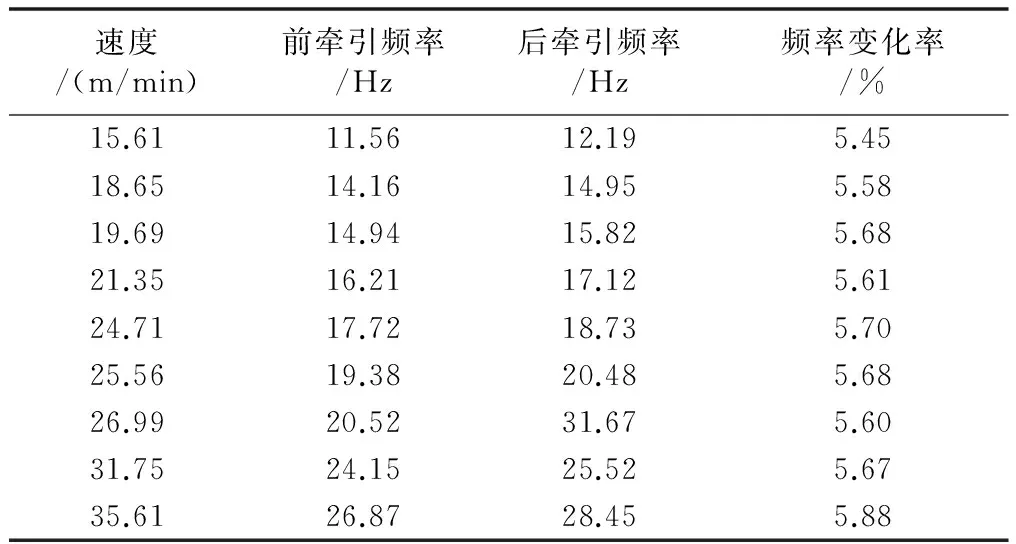
表2 改进后同步控制中的运行参数Tab.2 The operating parameters of the improved synchronous control scheme
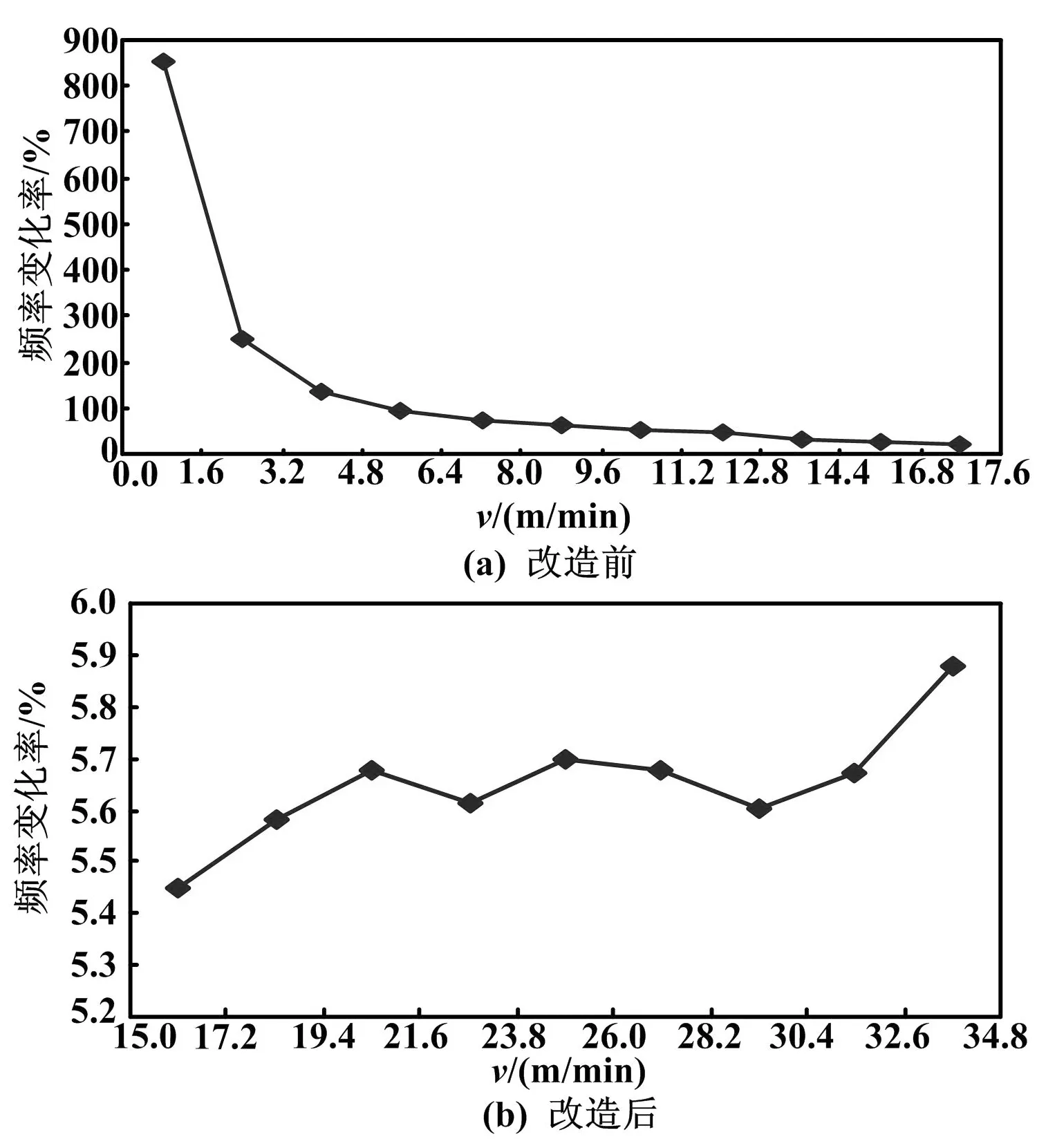
图5 频率变化率与生产速度关系图
Fig.5 Relationship between variable rate of frequency and the production speed从图5可分析出因生产速度降低而在两牵引间的电缆上产生的张力变化结果:传统同步控制中,电缆中的张力随着生产速度的降低呈几何级数增长,这种陡升的张力极易拉断电缆;采用速度差跟随同步控制,电缆中张力随着生产速度的降低稳定在6%附近,以稳定的速度变化率,使前牵引电机的转速跟随后牵引电机的转速,确保张力可控可调,不受速度的变化而变化,消除了降速时给电缆带来的破坏性张力。
4 结束语
针对双牵引电机的同步运行出现的问题,结合变频器H1000,提出了新的相对值跟随控制的方案。分析与实测表明,该方法增强了系统的灵活性、稳定性与可靠性,满足了企业关于控制设备成本、提升了设备生产效率的精细化管理要求。
[1] 伍铁斌,龙文,朱红求.复杂工业过程操作参数优化研究进展[J].自动化仪表,2016,37(3):1-4.
[2] 牛维扬,李祖明.电机学[M].2版.北京:中国电力出版社,2005:158-161.
[3] 李发海,王岩.电机与拖动基础[M].4版.北京:清华大学出版社,2012:308-330.
[4] 周志敏,纪爱华.电动机变频节电380问[M].北京:中国电力出版社,2011:20-40.
[5] 李先允,姜宁秋.电力电子技术[M].北京:中国电力出版社,2006:56-63.
[6] 陈洪亮,张峰,田社平.电路基础[M].北京:高等教育出版社,2007:286-300.
[7] 江辑光,刘秀成.电路原理[M].2版.北京:清华大学出版社,2007:128-137.
[8] 谭阳红.基于OrCAD16.3的电子电路分析与设计[M].北京:国防工业出版社,2011:5-80.
[9] 王划一,杨西侠,林家恒,等.自动控制原理[M].北京:国防工业出版社,2009:5-13.
Research on the Technical Scheme Based on Anchuan H1000 Inverter for Synchronous Control of Double Motors
To solve the problems that appear in traditional synchronous control system for double traction motors, the method of following up control with frequency relative value is put forward. Through setting the gains of the forward and reverse running of the inverter for front and rear traction; and applying instructions to specify the switching port, to make the front traction motor follows the rear traction motor. The new following up control method is compared with traditional control method, the new method overcomes the deficiencies of unsmooth switching process and the mutation of the tension of the cable between two traction motors; good dynamic performance is shown at high, medium and low speed status. This method improves the quality of products, enhances the flexibility of system, and improves the production efficiency of the equipment; it has the reference and the promotion significance.
Inverter Double motors Traction Synchronous control Dynamic performance Reliability Tension
TH-3;TP275
A
10.16086/j.cnki.issn 1000-0380.201612022
修改稿收到日期:2016-05-13。
作者周永亮(1987—),男,2010年毕业于南京工程学院电气工程及其自动化专业,获学士学位,助理工程师; 主要从事电气设计方向的研究。
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
建筑与预算(2022年2期)2022-03-08
汽车维护与修理(2020年15期)2020-02-04
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
汽车电器(2018年1期)2018-06-05
制造技术与机床(2017年2期)2017-05-04
中学生数理化·高二版(2016年5期)2016-05-14
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
