无刷双馈电机模糊直接转矩控制系统研究
2016-12-30 02:24:21李冰刘石
自动化仪表 2016年12期
李 冰 刘 石
(华北电力大学科技学院1,河北 保定 071000;华北电力大学控制与计算机工程学院2,北京 102206)
无刷双馈电机模糊直接转矩控制系统研究
李 冰1刘 石2
(华北电力大学科技学院1,河北 保定 071000;华北电力大学控制与计算机工程学院2,北京 102206)
针对传统直接转矩控制方法控制无刷双馈电机(BDFM)存在的转矩脉动大、开关频率不固定等问题,提出了一种基于DSP的模糊直接转矩控制策略。利用模糊控制系统设计软件WinFACT进行了模糊控制器设计,并将其转换为C程序代码后移植到DSP中,实现了无刷双馈电机模糊直接转矩控制系统的软、硬件设计。试验结果表明,该控制方法在保持传统直接转矩控制优点的基础上,能够有效减小转矩脉动,改善直接转矩控制的性能。
无刷双馈电机(BDFM) 模糊控制 转矩脉动 DSP 直接转矩控制(DTC) WinFACT 智能功率模块 逆变器
0 引言
无刷双馈电机(brushless doubly-fed machines,BDFM)由2套独立的定子绕组(功率绕组和控制绕组)和特殊结构的转子组成,具有结构简单、无电刷、运行可靠、所需变频器装置容量较小等特点[1]。直接转矩控制(direct torque control,DTC)具有控制结构简单、转矩动态响应快、鲁棒性强、对电机参数依赖性小等优点,解决了矢量控制存在的结构复杂、计算量大、对参数变化敏感等问题[2]。传统DTC采用双滞环控制器,分别对转矩和磁链进行控制,在每个采样周期中仅有1个电压矢量起作用,无法实现对转矩和磁链误差的完全补偿,会造成转矩和磁链的脉动较大[3]。为了解决DTC存在的转矩脉动问题,近年来国内外学者提出了各种智能控制方案,其中模糊直接转矩控制策略得到了越来越多的关注[4]。虽然有学者也进行了无刷双馈电机的模糊直接转矩控制研究[5-7],但仅限于仿真,并未进行试验验证。
本文通过对模糊直接转矩控制策略的分析,利用WinFACT软件设计了模糊直接转矩控制方案,并将其转换为C程序代码后移植到DSP,实现了无刷双馈电机模糊直接转矩控制系统的软硬件设计。最后通过构建无刷双馈电机试验平台进行了试验验证。试验结果表明,该控制策略能够有效降低转矩和磁链的脉动。
1 系统总体结构与硬件设计
无刷双馈电机的模糊直接转矩控制系统主要包括上位机、DSP、电流传感器、电压传感器、转速传感器、IPM智能功率模块和无刷双馈电机等。系统总体结构框图如图1所示。
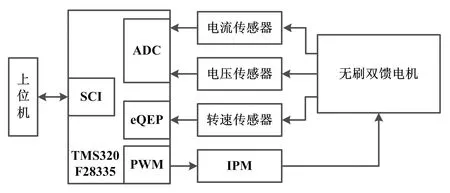
图1 系统总体结构框图
Fig.1 Overall structure of the system
电压传感器和电流传感器用于检测无刷双馈电机功率绕组和控制绕组的电压、电流,所采用的传感器为具有快速响应特性的霍尔传感器,采集到的电压、电流信号经过信号调理电路转换为0~3 V电压信号后送至DSP的A/D采样电路;转速传感器电路用于采集无刷双馈电机的实时转速,采用北京三晶创业科技公司的JN338AE型旋转式增量编码器测量电机转速,分辨率为1 024 PPR;增量编码器输出的正交脉冲信号通过光耦隔离电路送至DSP的增强型正交编码脉冲(enhanced quadrature encoder pulse,eQEP)模块输入端实现转速测量;三相逆变器电路采用日本三菱电机公司的PM150RLA120型IPM智能功率模块[8];DSP输出的脉宽调制(pulse width modulation,PWM)驱动信号经光耦隔离后驱动逆变器产生三相交流电,并被送至控制绕组,以控制无刷双馈电机的运行。
控制器采用TI公司C2000系列高性能32位浮点DSP控制器TMS320F28335[9],其采用高性能静态CMOS技术,主频最高可达150 MHz,具有较强的实时控制能力;16通道12位带流水线结构的高速模数转换器可实现快速数据采集;3个具有16级深度FIFO的串行通信接口(serial communication interface,SCI)模块可实现与上位机串行通信;6个独立的PWM模块用于逆变器驱动信号输出;2个eQEP模块为旋转编码器提供直接接口,以获取高精度的转速信数据。DSP控制器主要实现数据采集、坐标变换、模糊控制运算、输出逆变器PWM控制信号等功能,并将采集到的电压、电流、转速数据及计算处理后的转矩、磁链等数据通过串行通信接口发送至上位机;上位机通过LabVIEW软件进行数据的实时显示和保存,同时,LabVIEW软件可通过串行通信接口向DSP发送给定转速等控制命令。
2 软件系统设计
2.1 无刷双馈电机的模糊直接转矩控制
无刷双馈电机的模糊直接转矩控制程序主要包括主程序和定时器中断服务子程序。其中,主程序用于实现系统初始化、任务建立、中断允许、IPM故障保护等功能;定时器中断服务子程序用于产生逆变器PWM驱动信号,是软件设计的核心。采用Timer 0实现定时中断,采样周期Ts=200 μs。在每个采样周期开始时,DSP通过A/D转换模块、eQEP模块,分别读取无刷双馈电机功率绕组和控制绕组电压、电流以及电机转速信号;由转速PI调节器计算电磁转矩给定值,对电压、电流信号进行坐标转换后估算电磁转矩、控制绕组定子磁链和磁链角,并与转矩给定值、磁链给定值比较后得到各自误差;转矩误差、磁链误差与磁链角送入模糊控制器后,由模糊控制器对输入信号模糊化,并根据模糊规则输出合适的空间电压矢量控制信号,以实现对逆变器的控制。功率绕组与控制绕组电压、电流、转矩、转速等数据通过串行通信接口送至上位机进行显示与保存,并进入下一个采样周期。模糊直接转矩控制[6]的中断服务子程序流程图如图2所示。
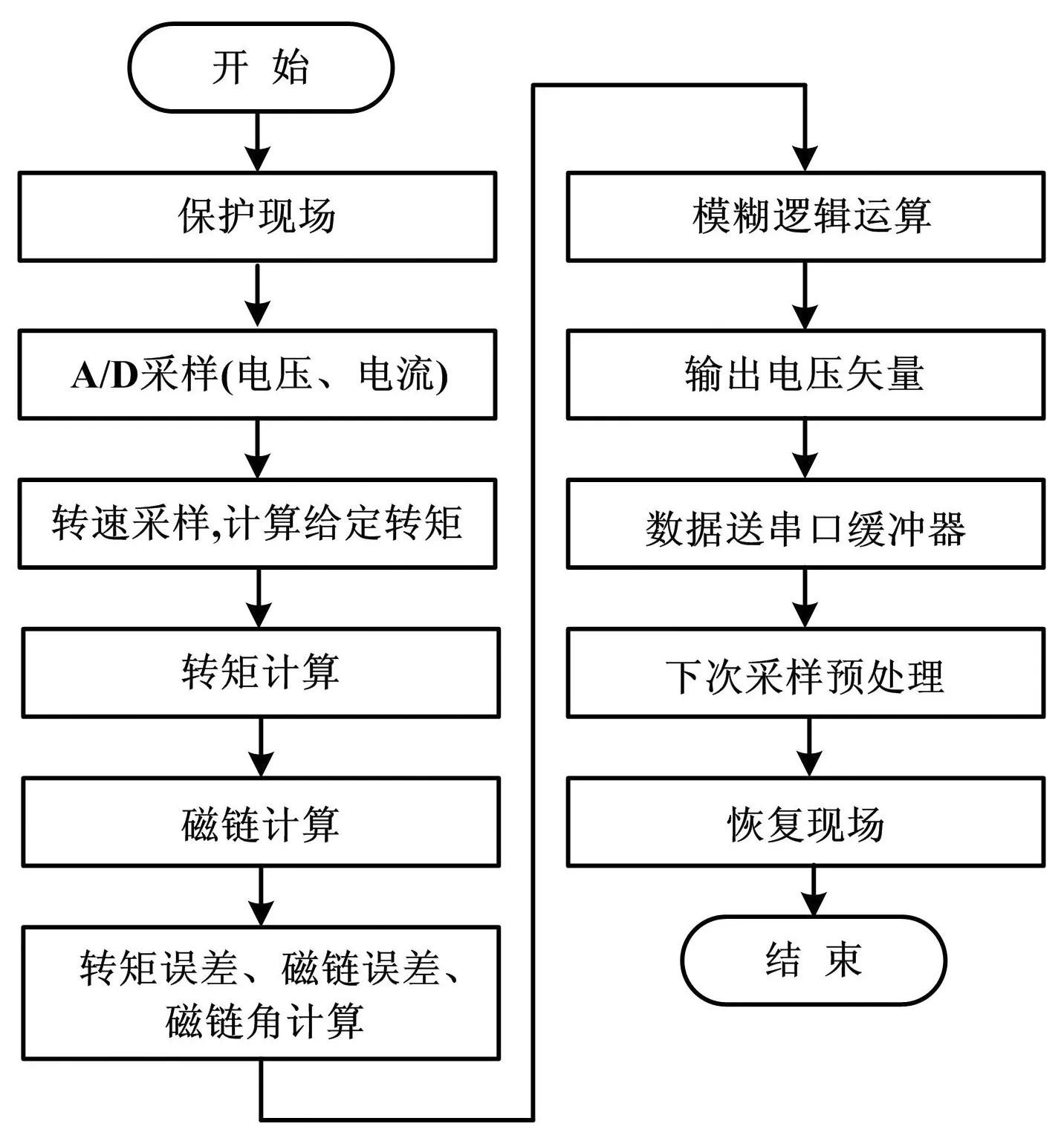
图2 中断服务子程序流程图
Fig.2 Flowchart of interrupt service subroutine
2.2 模糊控制规则
本文中,模糊控制器的输入分别为转矩误差、磁链误差和控制绕组磁链角,输出为所选择的空间电压矢量。该控制器由模糊化、模糊推理、解模糊3部分组成。转矩误差在其论域[-2,2]上定义了5个模糊子集{NL,NS,EZ,PS,PL},磁链误差在其论域[-0.05,0.05]上定义了3个模糊子集{N,Z,P},磁链角θ在其论域[0,2π]上定义了12 个模糊子集{θ1,θ2,…,θ12}。模糊控制器的输出为确定的电压空间矢量,无需进行模糊化,可直接分为8个单点模糊子集{U0,U1,U2,U3,U4,U5,U6,U7}。
模糊控制规则以IF- THEN形式表示[4],第i条规则Ri表示为:
Ri:ifEψ=AandET=Bandθ=θjthenU=Uk式中:A、B、θj分别为转矩误差、磁链误差、磁链角;Uk为空间电压矢量单点集,i=1~180;j=1~12,k=0~7。
模糊控制规则共有180条模糊规则,部分模糊控制规则如表1所示。模糊控制器采用Mamdani推理算法,取最大隶属度对应的输出量作为逆变器的电压矢量输出。由于该模糊推理输出的是空间电压矢量的单点模糊集,因此无需解模糊[10]。
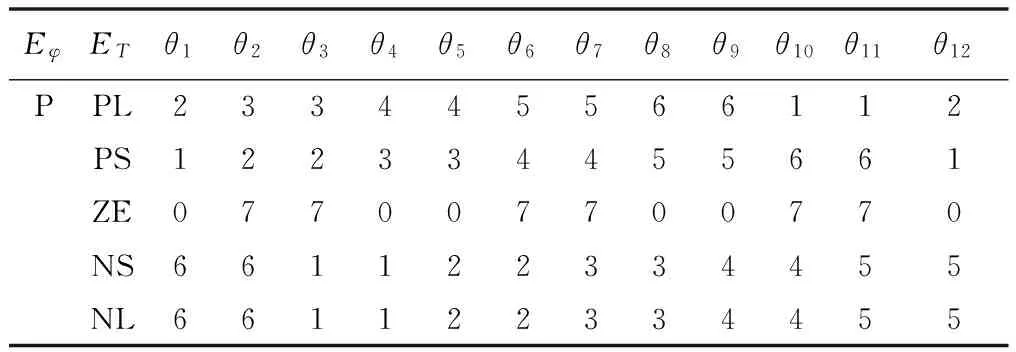
表1 部分模糊控制规则Tab.1 Part of fuzzy control rules
转矩误差μ(ΔTe)、磁链误差μ(Δψc)、磁链角μ(θ)的隶属函数示意图如图3所示。

图3 模糊直接转矩控制隶属函数示意图
Fig.3 Membership function of fuzzy-DTC
2.3 模糊控制器的编程实现
基于DSP的模糊控制程序采用C语言实现,直接转矩模糊控制器包含3个输入量、1个输出量以及180条控制规则。采用WinFACT软件进行模糊控制器的设计,将程序转换为C语言代码后,实现了在DSP上的运行。WinFACT是专门为模糊控制系统而设计的应用软件,是Windows环境下的图形化开发工具,支持整个模糊控制系统开发周期[11-12]。
WinFACT具有模糊逻辑操作程序(fuzzy logic operating program,FLOP)和模糊应用C代码生成器(fuzzy application C code generator,FALCD)2个工具包。其中,FLOP用于模糊控制器的设计,主要功能包括定义模糊子集、建立模糊规则、实现模糊推理、模糊控制过程仿真、为其他应用提供DDE接口等;FALCO工具用于将FLOP设计的模糊控制器转换为C程序代码,通过裁剪与整理后可以移植到DSP上,实现模糊控制算法的应用。
FALCO产生的C程序代码包含2个文件:FuzzyDTC_F4.h和FuzzyDTC_F4.c。.h头文件定义了模糊控制所需要的接口函数,.c文件描述了模糊控制器的结构和模糊规则,将输入量隶属度、输出量隶属度、模糊规则等定义为数组,供模糊算法运算时调用。
由FALCO产生的模糊控制器代码主要包含4个函数,并在.h头文件中进行了定义,分别为:
void FuzzyDTC_F4_SetNumType(void) ;
// 参数格式判别函数
void FuzzyDTC_F4_init(void) ;
//初始化函数
voidFuzzyDTC_F4_calc(
const NumTypeF4_t i0,
const NumTypeF4_t i1,
const NumTypeF4_t i2,
NumTypeF4_t *o0) ;
//模糊运算函数
void FuzzyDTC_F4_free(void) ;
//内存释放函数
当所需参数准备就绪后,可以通过调用FuzzyDTC _F4_calc函数来进行模糊运算。
实现无刷双馈电机模糊直接转矩控制的主要代码如下:
void FuzzyDTC_F4_init(void)
{
FCF4_init(&FuzzyDTC_F4_FC,&FuzzyDTC_F4_FCMem);
}
//模糊控制器初始化
FuzzyDTC_F4_FC为模糊控制器语法规则定义结构体,包括输入输出数量、模糊规则数、输入量隶属度、输出量隶属度、模糊规则、权重、模糊推理算法等。FuzzyDTC_F4_FC定义如下:
staticconst FuzzyControllerF4_t FuzzyDTC_F4_FC=
{
3,
1,
180,
FuzzyDTC_F4_Input,
FuzzyDTC_F4_Output,
FuzzyDTC_F4_RuleBase_pre,
FuzzyDTC_F4_RuleBase_con,
FuzzyDTC_F4_RuleBase_weight,
MAX_MIN,
DEFUZZY_COG,
60,
AND_MIN,
OR_MAX
}
模糊运算函数FuzzyDTC _F4_calc()通过调用WinFACT定义的FCF4_calc()函数来进行模糊运算,调用格式为:
void FuzzyDTC_F4_calc
{
……
FCF4_calc(&FuzzyDTC_F4_FC,&FuzzyDTC_F4_FCMem,ai,ao);
……
}
参数的类型与数量必须与所定义的一致。运算前,FCF4_calc()会对所有参数进行检查。
运算结束后,通过调用FuzzyDTC _F4_free()函数,释放当前运算所占用的内存空间。
void FuzzyDTC_F4_free(void)
{
FCF4_free(&FuzzyDTC_F4_FC,&FuzzyDTC_F4_FCMem);
}
3 试验结果
为了对所提出的无刷双馈电机模糊直接转矩控制进行试验研究,设计了一套基于TMS320F28335数字信号处理器的无刷双馈电机试验系统。试验系统采用1台直流发电机作为模拟负载,由霍尔传感器采集功率绕组和控制绕组电压、电流数据,增量编码器采集电机转速;采用日本三菱电机公司的PM150RLA120型IPM智能功率模块作为逆变器电路。TMS320F28335数字处理器作为控制系统核心,实现了数据采集、模糊控制算法运算、PWM驱动信号输出,并通过串行通信接口与上位机通信,实现了DSP与上位机的数据传输。上位机通过Labview软件接收电流、转速、转矩等数据,并对其进行实时显示和存储。
逆变器开关频率为5 kHz,给定控制绕组磁链幅值为|Ψc_ref|=0.85 Wb,转动惯量J=0.8 kg·m2;电机空载启动时进入同步速后,给定转速为nr=624 r/min,稳定运行后,加40 N·m的负载运行一段时间后负载再次变为空载。
试验所用的无刷双馈电机参数如表2所示。

表2 无刷双馈电机参数Tab.2 The parameters of BDFM
图4是转速、转矩、功率绕组A相电流、控制绕组A相电流的试验曲线。
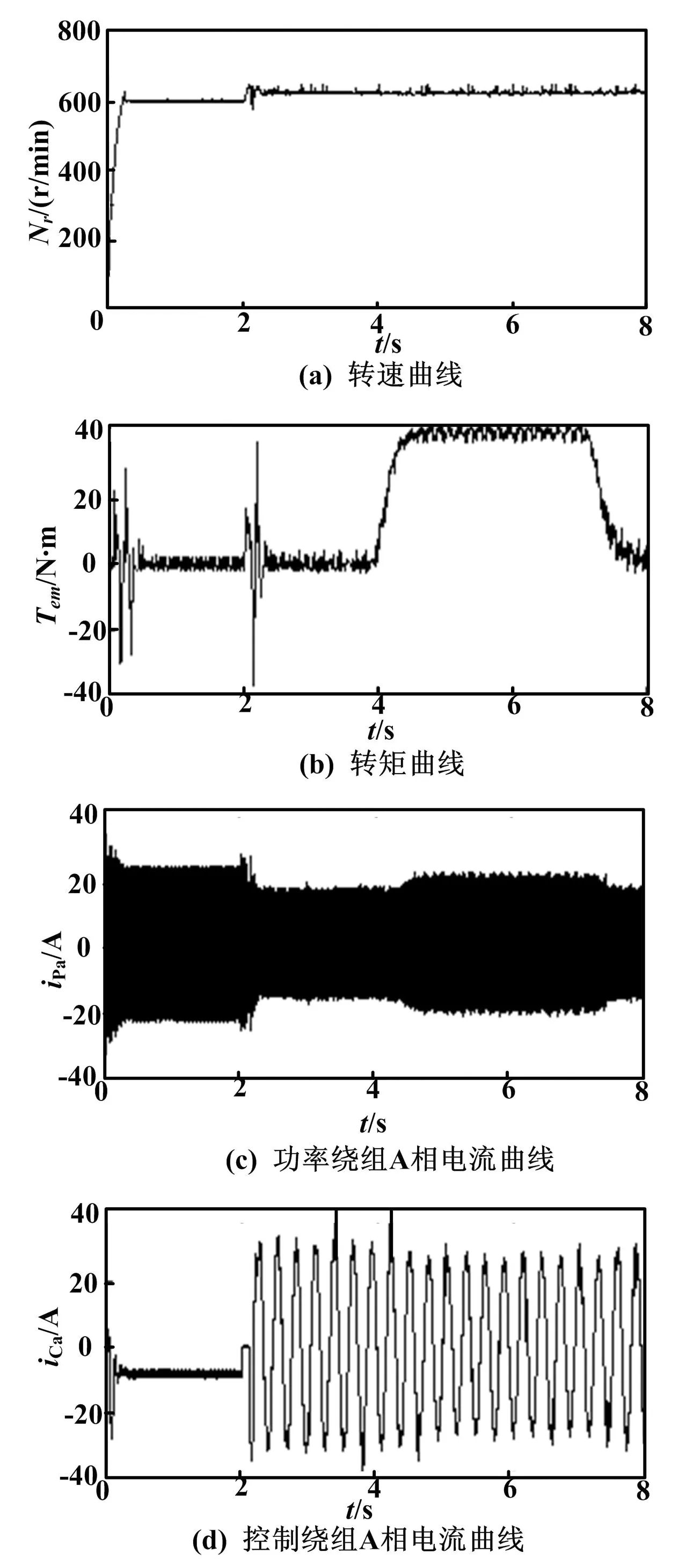
图4 试验曲线
Fig.4 Curves of test
由图4(a)可知,当电机空载启动时,转速快速升至给定转速,启动过程时间较短,转速响应动态性能较好;稳定运行后,加减负载时的转速波动较小。
由图4(b)可知,当电机空载启动时,转矩为零;给定转速变化时,转矩会产生波动。稳定运行加负载时,转矩快速跟踪给定转矩,控制过程中转矩脉动较小,减负载时,转矩波动依然较小。
由图4(c)可知,功率绕组电流在启动时的电流波动较大,直至稳定运行后电流趋于稳定。当电机增加负载时,功率绕组电流增大;减少负载时,电流减小。
由图4(d)可知,控制绕组电流在启动时的电流波动较大,控制电机快速达到给定转速,稳定运行后电流趋于平稳。当电机增加负载时,电流减小;减少负载时,电流增大。
4 结束语
在对模糊算法原理与TMS320F28335特点进行分析的基础上,设计了无刷双馈电机的模糊直接转矩控制系统,对系统的结构和模糊控制过程进行了详细的介绍,并利用WinFACT实现了模糊控制算法的设计以及C程序代码的转换;将其移植到DSP5后,通过试验对其控制性能进行了验证。试验结果表明,试验过程所实现的无刷双馈电机模糊直接转矩控制与仿真运行时的结果基本一致,验证了该控制系统的有效性和可行性。
[1] PROTSENKO K,XU D.Modeling and control of brushless doubly-fed induction generators in wind energy applications[J].IEEE Transactions on Power Electronics,2008,23(3):1191-1197.
[2] BRASSFIELD W R,SPEE R,HABETLER T G.Direct torque control for brushless doubly-fed machines[J].IEEE Transactions on Industry Applications,1996,32(5):1098-1104.
[3] CASADEI D,PROFUMO F,SERRA G,et al.FOC and DTC:two viable schemes for induction motors torque control[J].IEEE Transactions on Power Electronics,2002,17(5):779-787.
[4] 林友杰.无刷双馈电机及其智能控制[D].长沙:湖南大学,2002.
[5] 焦卫星,魏晓赤,蔡莹.无刷双馈电机模糊直接转矩控制系统的研究[J].防爆电机,2014,49(3):16-19.
[6] 周欣欣,张爱玲.无刷双馈电机直接转矩控制转矩脉动最小化[J].电机与控制学报,2006,10(6):571-575.
[7] 姚兴佳,石磊,郭庆鼎.基于模糊控制的无刷双馈电机直接转矩控制[J].太阳能学报,2011,11(6):54-58.
[8] 苗俭威,王英.基于DSP+IPM的异步电机直接转矩调速系统设计[J].电气自动化,2015,37(3):1-2.
[9] 符晓,朱洪顺.TMS320F2833x DSP应用开发与实践[M].北京:北京航空航天大学出版社,2013:2-8.
[10]杨家强,黄进.异步电动机直接转矩控制转矩脉动最小化方法研究[J].电工技术学报,2004,19(9):23-29.
[11]BOL E W,SANTANDER A C A,ALMEIDA O D M,et al.WinFACT-a tool for teaching digital control[C]//Proceedings of the 38th IEEE Conference on Decision and Control,1999:353-358.
[12]张朝亮,江汉红,陈少昌,等.基于WinFACT的模糊控制系统设计[J].微计算机信息,2006,22(4):35-36.
Research on the Fuzzy Direct Torque Control System for Brushless Doubly-fed Machines
To deal with the large torque ripple and inconstant switching frequency of the traditional direct torque control method for brushless doubly-fed machines (BDFM),a fuzzy direct torque control (DTC) strategy based on DSP is proposed.The fuzzy controller is designed by using the software of WinFACT and transplanted to the DSP after converting into C source code.Software and hardware design of fuzzy direct torque control system for BDFM is achieved.Experimental results show that on the basis of keeping advantages of traditional DTC,the proposed control method reduces torque ripple effectively,which improves the performance of traditional DTC.
Brushless doubly-fed machines(BDFM) Fuzzy control Torque ripple DSP Direct torque control(DTC) WinFACT Intelligent power module Inverter
中央高校基本科研业务费专项基金资助项目(编号:13MS83)。
李冰(1977—),男,现为华北电力大学热能工程专业在读博士研究生,讲师;主要从事新能源发电系统控制策略方向的研究。
TH183;TP368
A
10.16086/j.cnki.issn 1000-0380.201612003
修改稿收到日期:2016-05-05。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:18
防爆电机(2021年6期)2022-01-17 02:40:18
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
电测与仪表(2016年10期)2016-04-12 00:26:38
通信电源技术(2016年5期)2016-03-22 01:09:57
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2015年16期)2015-04-12 00:44:38
大电机技术(2015年5期)2015-02-27 08:22:27