
一种对接机构转子杯式电磁阻尼器设计研究
2016-12-21 08:37高金忠叶甲秋曾令斌
上海航天 2016年5期
高金忠,周 杰,叶甲秋,曾令斌
(1.上海市空间飞行器机构重点实验室,上海201108; 2.上海宇航系统工程研究所,上海201109)
一种对接机构转子杯式电磁阻尼器设计研究
高金忠1、2,周 杰1、2,叶甲秋1、2,曾令斌1、2
(1.上海市空间飞行器机构重点实验室,上海201108; 2.上海宇航系统工程研究所,上海201109)
为适应不同方向对接耗能量大幅增加的状况,对一种空间对接机构耗能用转子杯式电磁阻尼器的设计进行了研究。在一定的简化条件下,建立了转子杯式电磁阻尼器阻尼力矩特性的理论计算模型。阻尼器材料选用钕铁硼、不锈钢和硬铝。对阻力器阳极的力矩特性进行了理论计算并与仿真比较,两者相近,表明理论计算模型较准确地反映了阻尼器各设计参数对阻尼力矩特性的影响,但理论计算值仍与样机实测结果存在一定偏差。用多轮迭代修正方式,对转子杯的参数进行调整,并考虑了由此产生的气隙厚度对漏磁的影响,获得了修正的阻尼器阻尼力矩计算公式。结果表明:在转速0~500 r/min范围内,阻尼力矩与转速实测值呈良好的线性关系,阻尼器产品实际测试结果与修正后的理论模型计算值基本一致。
对接机构; 耗能机构; 转子杯式电磁阻尼器; 阻尼力矩; 气隙磁密; 力矩特性; 迭代修正; 样机
0 引言
空间站工程中要求各飞行器分别从后向、前向和径向完成与空间站的交会对接,涉及的工况条件相当复杂,对接机构需消耗的能量较载人航天二期工程工况有大幅增加。原对接机构俯仰、偏航方向的阻尼器系数较低,当进行大吨位对接时,在捕获后,俯仰、偏航向的残余能量不能被很快吸收,导致对接环转角大幅增大,甚至破坏传动链。因此,对接机构须在现有基础上增加可控式耗能机构消耗俯仰和偏航向的对接能量,以满足各种空间站工程大吨位对接的需求。可控式耗能机构在两飞行器捕获前不工作,对接机构缓冲系统刚度保持原有的“软”特性,以保证在足够低的捕获速度下能顺利完成捕获;当两飞行器捕获后可控阻尼器开启,对接机构缓冲系统变“硬”,利用内部的电磁阻尼器快速有效地缓冲、消耗碰撞后的能量。电磁阻尼器属于机电阻尼类的线性缓冲器,其阻尼力矩与缓冲器转速成线性关系,具利于对接机构的力学特性,如满意的恢复系数和覆盖系数,同时该类型阻尼器又有极好的空间环境适应性,是空间缓冲耗能机构的最佳选择。目前,关于转子杯式电磁阻尼器研究的文献较少,前苏联在其空间对接机构中应用了该类型的电磁阻尼器,而美国在太阳电池阵展开机构、太阳遮光罩展开机构等航天产品中也应用了该类型的电磁阻尼器,但对其具体设计方法并无详细介绍[1-4]。国内哈尔滨工业大学、西北工业大学等对电磁阻尼器进行了研究,推导了阻尼力矩特性的理论计算公式,但对其理论计算方法缺乏充分的试验验证,用其计算方法设计的阻尼器性能与实际试验结果存在较大偏差[5-8]。工程上急需一种有效的转子杯式电磁阻尼器阻尼力矩特性设计方法。为此,本文基于转子杯式电磁阻尼器的工作原理,建立了阻尼器力矩特性的理论计算模型,在理论计算和仿真分析的基础上,根据多轮样机试验数值对阻尼力矩特性理论计算模型进行多次迭代修正,以获得一种较准确的转子杯式电磁阻尼器阻尼力矩特性理论计算模型。
1 阻尼力矩特性理论分析
转子杯式电磁阻尼器由外定子、内定子、转子和磁钢等组成,结构如图1所示。其中:内定子和外定子为导磁材料,转子为导电材料。工作原理为:当转子被外界原动机驱动在由磁钢产生的气隙磁场中旋转时,转子表面会感应产生电涡流,电涡流与磁场相互作用,产生阻止转子旋转的阻尼力矩。阻尼器转速与转矩的关系称为阻尼力矩特性,阻尼力矩特性是电磁阻尼器最重要的外特性,是阻尼器吸收与耗散能量水平的表征。
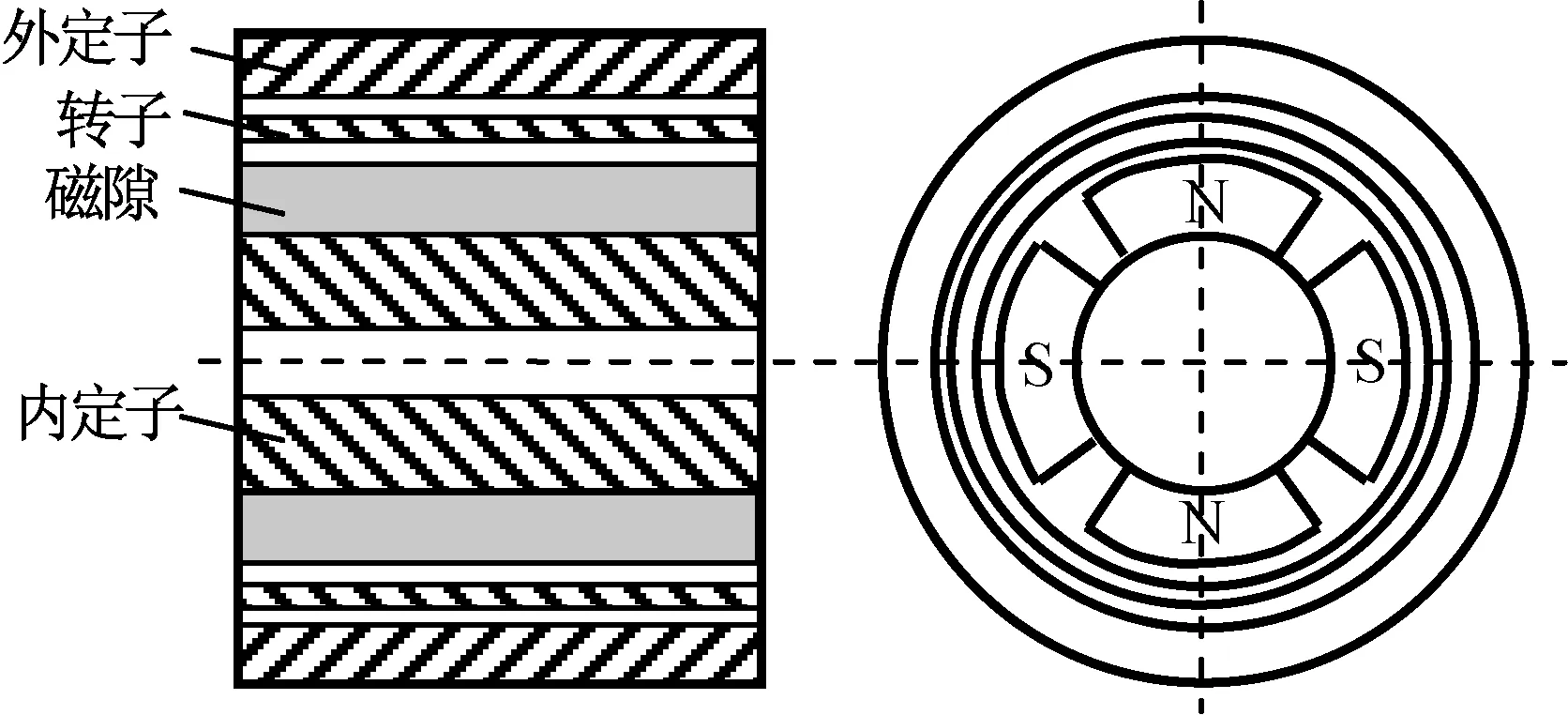
图1 阻尼器结构Fig.1 Structure of eddy current damper
为便于分析,本文作简化处理:不考虑阻尼器端部漏磁;转子杯涡流沿转子轴呈矩形分布;忽略转子电感;对未考虑的问题在理论计算公式中归为阻尼器修正系数。
转子杯转动时,两对极电磁阻尼器表面产生的电涡流瞬时如图2所示。
转子杯在定子磁场中受到电磁力
F=BIl.
(1)
式中:B为磁场的磁感应强度;I为转子杯中流过的电流(涡流);l为转子杯长度。
阻尼器电枢感应涡流为
(2)
式中:e为感应电动势;v为转子杯线速度;R为电枢电阻。
可得电磁力、电磁转矩和转子表面线速度分别为
(3)

(4)
v=πDn/60.
(5)
T与转子转速n的关系可表示为
(6)
每对极下转子杯有效长度部分电阻为

(7)
(8)
式中:B为气隙磁场磁感应强度;l为转子杯有效长度;D为转子杯直径(薄壁件,取中径);δ为转子杯厚度;P为磁极对数;ρ为电阻率。
根据阻尼器磁力线走向建立阻尼器的等效磁路(如图3所示),计算B(只计算1/4磁路,阻尼器磁路对称分布)[9]。
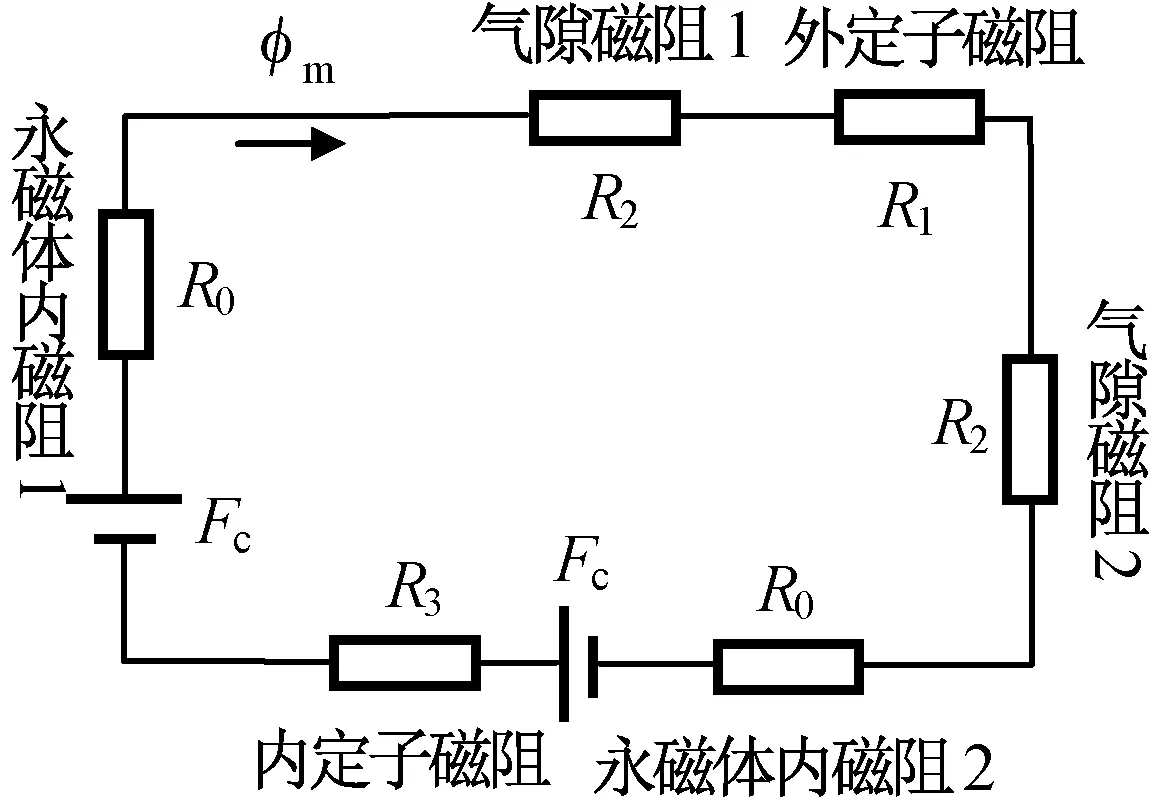
图3 阻尼器等效磁路Fig.3 Equivalent magnetic circuit of eddy current damper
对给定性能和尺寸的永磁体,其磁动势Fc为常数,有
Fc=Hchm.
(9)
式中:Hc为永磁体矫顽力;hm为永磁体磁化方向长度(即永磁体厚度)。
分别计算磁路中各段的磁阻,永磁体内阻R0,外定子磁阻R1,气隙磁阻R2,内定子磁阻R3。
磁阻计算公式为
(10)
式中:μr为材料的相对磁导率;μ0为真空磁导率;hi为磁路长度;Si为导磁面积。其中内定子和外定子材料相对磁导率随磁场强度而变。
由式(10)可求得磁路总气隙磁阻∑R。整个磁路磁通
(11)
磁路各处磁感应强度
Bi=φ/Si.
(12)
由式(9)~(12)可推导出电磁阻尼器气隙磁场
(13)
式中:S2为气隙导磁面积。
将式(13)代入式(8),得T,n的关系式为
(14)
2 阻尼器材料选取
为减小产品体积和重量,选取磁性能强、矫顽力大、温度系数低的高性能稀土永磁体N33UH钕铁硼,其剩磁>1.17 T,矫顽力>876 kA/m。
为减小产品体积和重量,机壳及定子材料选用导磁性能强、机加工性能好的材料,DT4E为最佳。因电工纯铁机壳表面不进行镀镍等处理会出现生锈现象,且即使进行了防锈处理,生锈隐患仍存在,故选用磁性能稍差但防锈性能较好的2Cr13作为机壳和内定子材料。对2Cr13进行适当热处理,可使磁感应强度大于1.45 T。
为使转子既具较大电导率,又有较小密度,在降低转子转动惯量的同时还有较好的机加工性能,选择硬铝2A12。与铜96相比,硬铝2A12的导电性稍差,但其密度小、比热容大,非常适合用于阻尼器的转子。铜96的电阻率为0.030 7 μΩ·m,硬铝2A12的电阻率0.043 5 μΩ·m,由式(14)可知:对相同体积的转子杯,铝质转子杯的阻尼力仅为铜质转子杯的70%,但铜的密度为8 700 kg/m3,铝的密度为2 700 kg/m3,相同体积的铝转子惯量几乎为铜转子的1/3,同时铝的比热容为0.88 kJ/(kg·℃),铜的比热容为0.39 kJ/(kg·℃),相同质量的转子杯吸收相同的能量,铜杯的温升为铝杯的2.56倍。综合考虑选取硬铝2A12作为转子杯材料。
3 阻尼力矩特性理论计算与仿真分析
用本文推得的理论计算式(14)对转子杯式电磁阻尼器样机进行理论计算。由式(14)可知:阻尼力矩的大小与转子杯转速呈线性关系,因此只需计算某一转速下的阻尼力矩,即可获得阻尼器的阻尼力矩特性。
将样机设计参数代入理论计算公式,计算得气隙磁场处的平均气隙磁密为0.64 T,阻尼器转速在500 r/min时其阻尼力矩为2.911 N·m。
根据样机设计参数,用电磁场仿真软件对转子杯式电磁阻尼器进行动态仿真,计算气隙磁密及不同转速下的阻尼力矩。
转子杯式电磁阻尼器横截面及磁力线走向如图4所示。阻尼器静态气隙磁密如图5所示。阻尼器动态气隙磁密如图6所示。
图4 阻尼器磁力线走向Fig.4 Magnetic line of eddy current damper
图5 阻尼器静态气隙磁密Fig.5 Static magnetic density of air gap of eddy current damper
图6 阻尼器动态气隙磁密Fig.6 Dynamic magnetic density of air gap of eddy current damper
由图6可知:虽然动态气隙磁密受感应涡流产生二次磁场的影响而发生气隙磁场畸变,使磁密一侧增大,一侧减小,但平均气隙磁密并未发生变化,平均气隙磁密绝对值与静态磁密平均值基本保持一致,约0.68 T。
转子转速为500 r/min时阻尼器力矩仿真结果为3.31 N·m,如图7所示。
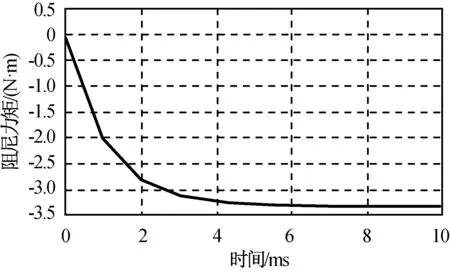
图7 转速500 r/min时阻尼器阻尼力矩Fig.7 Damping torque of eddy current damper with rotor speed 500 r/min
将转子杯式阻尼器的理论计算值与仿真结果进行比较,阻尼力矩(理论计算值2.911 N·m,仿真结果3.31 N·m)基本一致;平均气隙磁密计算结果(理论计算值0.64 T,仿真结果0.68 T)也基本一致,表明理论分析结果一定程度上反映了阻尼器各参数对阻尼力矩特性的影响。
因上述研究主要基于二维截面下的稳态运行,并对磁路进行了简化,而实际上阻尼器工作情况极其复杂,涉及瞬态的涡流场、端部漏磁、阻尼器三维结构、各材料实际性能参数与理论值间差异等,理论结果需根据大量试验结果进行修正。
4 样机测试结果与理论计算比对分析及修正
根据仿真所用的设计参数对转子杯式电磁阻尼器样机进行投产并测试,经测试样机所得500 r/min时阻尼力矩为1.76 N·m,而由理论计算在二维情况下阻尼力矩为2.911 N·m,两者偏差较大。为此,本文对阻尼器阻尼力矩实测值与理论值偏差的原因进行分析。
首先考虑材料性能与理论计算时取值的一致性。阻尼器所用磁钢磁性能经入厂复验,磁性能与理论计算取值一致,满足要求;内外定子磁性能处理结果与理论计算取值一致,满足要求,由此将问题定位于转子杯的电导率是否与理论取值一致。转子杯属于铝合金薄壁件,在加工过程中需进行时效处理,防止应力集中而变形。不同的时效处理(时效温度及时间)会导致铝合金材料的电阻率与理论值不一致[10]。对样机所用铝合金材料的电阻率进行实测,结果为5.6×10-8Ω·m,而理论计算中所用电阻率为4.35×10-8Ω·m,两者差异较大。将铝合金电阻率实测值代入理论计算公式(式14),算得阻尼力矩为2.26 N·m,实际阻尼力矩值为理论计算力矩值的0.78倍,由此排除材料实际性能与理论值不一致的原因。
对该结构的阻尼器,考虑理论模型与实际的差异,可在理论推导计算公式的基础上增加1个大小为0.78的修正系数K。则修正后的阻尼器阻尼力矩理论计算公式为
(15)
根据样机测试结果,力矩性能指标不能满足要求,为此对阻尼器部分参数进行调整。由式(15)可知:在阻尼器长度和包络外径不变时,只能通过增大转子杯厚度使转子电阻减小或增加B以增大阻尼力矩。转子杯厚度的增加会导致气隙长度增大,使整个磁路的磁阻进一步增加,使B略微减小。
将原转子杯的δ由1.4 mm增至1.8 mm,空气隙hk由原来的2 mm增至2.4 mm,其余参数做适应性调整,用式(15)计算调整后的阻尼力矩(所用转子电导率为实测值),得转子转速为500 r/min时,阻尼力矩为2.311 N·m。样机返修后重新测试,测得其阻尼力矩为2.17 N·m,较修正后的理论计算值偏小。分析发现,其原因是随着阻尼器气隙的增大(由原来的hk1=2.0 mm增大为hk2=2.4 mm),其中气隙磁场边缘的漏磁也随之增大,导致气隙磁密较理论计算值偏小。
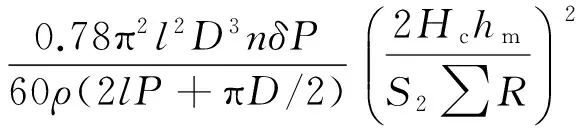
因此,根据前后两次试验值再次对阻尼器的理论计算公式进行修正,增加了气隙厚度对漏磁的影响部分。将电磁铁吸力计算中考虑气隙漏磁的经验公式引入理论计算,除增加K外另增加一项1/(1+ahk),此处a为修正系数。则有
(16)
由式(16),可得K=1.13,a=225。这样,阻尼器阻尼力矩理论计算公式修正为
因仅对转子杯尺寸进行调整后的阻尼器性能仍不能满足要求,在保持转子杯厚度不变条件下,更换磁性能更强的钕铁硼N38UH,剩磁>1.30 T,矫顽力>900 kA/m。用式(17)求得其理论计算值为2.52 N·m。
按重新确定的设计参数,研制了5套电磁阻尼器并进行测试,阻尼器工作转速500 r/min时阻尼力矩分别为2.48,2.55,2.60,2.58,2.42 N·m(在2.42~2.6 N·m 范围内),在转速0~500 r/min范围内,阻尼力矩与转速实测值具有良好的线性关系,产品实测结果与修正后的理论计算结果基本保持一致。
5 结束语
本文以对接机构耗能用转子杯式电磁阻尼器为研究对象,推导了转子杯式电磁阻尼器阻尼力矩特性的理论计算模型,并对电磁阻尼器阻尼力矩特性进行了仿真分析。在理论计算和仿真分析的基础上,通过多轮转子杯式电磁阻尼器样机试验结果对阻尼力矩特性的理论计算模型进行迭代修正,获得了影响转子杯式电磁阻尼器阻尼力矩特性的敏感设计参数,为今后同类型电磁阻尼器的设计、研发、制造提供了一定的理论基础。后续考虑在转子杯式电磁阻尼器的基础上对盘式电磁阻尼器进行研究。电磁阻尼器具有较大能耗比、良好空间环境适应性等优点,可推广用于我国空间展开机构等其他航天产品。
[1] STARINS N J. Eddy current damper simulation and modeling[C]// Proceedings of the 9th European Space Mechanisms and Tribology Symposium. Liege: ESA/ESTEC, 2001: 480, 321-326.
[2] 徐青华, 刘立平. 航天器展开机构阻尼器技术概述[J]. 航天器环境工程, 2007, 24(4): 239-243.
[3] 寇宝泉, 金银锡, 张赫, 等. 电磁阻尼器的发展现状及应用前景[J]. 中国电机工程学报, 2015, 35(12): 3132-3143.
[4] WANG X, WANG D. Calculation of eddy current loss and thermal analysis for adjustable permanent magnetic coupler[C]// Proceedings of International Conference on Electronic & Mechanical Engineering and Information Technology. Harbin: IEEE, 2011: 4405-4408.
[5] 赵阳, 曹喜滨, 徐玉如. 空间对接机构电磁阻尼器参数优化设计研究[J]. 空间科学学报, 2000, 20(10): 366-372.
[6] 王有林, 刘景林. 电磁阻尼器设计研究[J]. 西北工业大学学报, 2006, 24(3): 358-361.
[7] 罗玲, 王燕芳, 刘景林, 等. 电磁阻尼器静态气隙磁场的三维仿真分析[J]. 微特电机, 2009(2): 4-5+22.
[8] 杨菲菲. 电磁阻尼器力矩特性的仿真研究[D]. 西安: 西北工业大学学报, 2007.
[9] 唐任远. 现代永磁电机理论与设计[M]. 北京: 机械工业出版社, 2016.
[10] 石峰, 王煜, 叶朋飞, 等. 6063铝合金导电轨的电导率与生产工艺关系的研究[J]. 轻合金加工技术, 2009, 37(10): 42-43.
Research of an Eddy Current Damper Design for Docking Mechanism
GAO Jin-zhong1, 2, ZHOU Jie1, 2, YE Jia-qiu1, 2, ZENG Ling-bin1, 2
(1. Shanghai Key Laboratory of Spacecraft Mechanism, Shanghai 201108, China; 2. Aerospace System Engineering Shanghai, Shanghai 201109, China)
An eddy current damper with high torque capacity has been developed as an energy absorption device for space docking mechanism to adapt energy absorption increasing greatly during docking in this paper. Theoretical model of torque-speed characteristic for eddy current damper was established with certain simplified conditions. NdFeB magnet, stainless steel and duralumin were selected as the materials of eddy current damper. The theoretical computation of the torque-speed characteristic for the damper was carried out and compared to the simulation value. It showed that the results of computation and simulation were similar, which meant the theory model characterized the influence of various parameters of the damper on the torque-speed characteristic correctly. But the computation results were still different from the test value of the prototype. The damper’s parameters were adjusted through multiple iteration modification, and the relative effect of air-gap thickness on the magnetic leakage was in consideration. The modified computation equation of damping torque for the damper was obtained at last. The results showed that the damping torque had linearity relationship with the rotation speed measured in the scope of rotation speed from 0~500 r/min. The test results of the prototypes were agreed with the computation values through modified model.
Docking mechanism; Energy dissipation mechanism; Eddy current damper; Damping torque; Air-gap flux density; Torque-speed characteristic; Iteration modification; Prototype
1006-1630(2016)05-0023-06
2016-09-04;
2016-09-29
国家自然科学基金资助(51505295)
高金忠(1985—),男,硕士,主要研究方向为空间机构设计。
TM359.4
A
10.19328/j.cnki.1006-1630.2016.05.004
猜你喜欢
防爆电机(2022年4期)2022-08-17
建材发展导向(2022年5期)2022-04-18
同济大学学报(自然科学版)(2021年7期)2021-08-07
时代汽车(2021年6期)2021-04-09
时代汽车(2021年5期)2021-04-06
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
振动工程学报(2019年5期)2019-11-27
北京航空航天大学学报(2017年3期)2017-11-23
