
电动汽车轴向轮毂电机的工作特性
2021-04-09 05:50章友京刘琳沙文瀚
时代汽车 2021年6期
章友京 刘琳 沙文瀚

摘 要:本文针对轴向永磁轮毂电机变负载调速时的传动性能,分析了启动过程中的转矩和转速等启动性能以及启动完成后的磁密、涡流损耗、传动效率等工作性能。首先运用矢量磁位法建立了数学模型,得到气隙磁密、转矩、轴向力和传动效率等工作参数的数学表达式,并运用Matlab软件进行了系统气隙磁密的数值计算;然后利用Magnet软件模拟得到了不同输入转速和不同变负载系数下启动过程的转矩和转速的变化规律,接着分析启动完成后稳定运行时的磁密、涡流损耗和传动效率;最后搭建模拟的轴向磁通轮毂电机实验平台,测量得到了不同输入转速下的转速、转矩和传动效率,验证了理论分析和模拟的正确性。本文研究成果有利于轴向永磁磁通轮毂电机传动性能的研究,对提高轮毂电机工作效率的提高具有重要意义。
关键词:轮毂电机 传动性能 涡流损耗 磁密
Working Characteristics of Axial Hub Motors for Electric Vehicles
Zhang Youjing Liu Lin Sha Wenhan
Abstract:Aiming at the transmission performance of the axial permanent magnet hub motor during variable load speed regulation, this paper analyzes the starting performance such as torque and speed during the starting process, as well as the working performance such as magnetic density, eddy current loss and transmission efficiency after starting. Firstly, a mathematical model was established using the vector magnetic potential method to obtain the mathematical expressions of working parameters such as air gap flux density, torque, axial force and transmission efficiency, and the numerical calculation of the system air gap flux density was carried out using Matlab software. Using magnet software to simulate the torque and speed changes during the start-up process under different input speeds and different variable load factors, the article then analyzes the magnetic density, and the eddy current loss and transmission efficiency during stable operation after the start-up is completed. Finally the research builds the simulated axial. The flux hub motor experimental platform has measured the speed, torque and transmission efficiency at different input speeds, which verifies the correctness of the theoretical analysis and simulation. The research results of this paper are conducive to the research on the transmission performance of axial permanent magnetic flux in-wheel motors, and are of great significance to improving the efficiency of the in-wheel motors.
Key words:hub motor, transmission performance, eddy current loss, magnetic density
1 引言
隨着能源消耗的不断增长以及环境问题的日益严峻,电动汽车的研发得到广泛重视。作为电动汽车的核心部件,驱动电机性能的优劣直接关系到整车运行的品质[1]。与传统的径向磁场永磁电机相比,轴向磁场永磁( axial-flux permanent-magnet,AFPM) 电机具有高径长比、高转矩密度及高运行效率的特点,在电牵引驱动,特别是在电动汽车的轮毂或轮边驱动中具有优越性[2]。作为一种高性能永磁电机,SMC-YASA 电机首先提出并应用于电动汽车驱动[3],而后得到了很好的开发和应用。文献【4】介绍了一种新型的轴向磁场永磁电机,该电机采用分数槽集中绕组及无轭部电枢铁心结构,具有电枢铁心用量少、铁心磁路短、绕组用铜少、绕组电阻小的特点,与普通 AFPM 电机相比具有更高的性能。文献【5~8】介绍了一种将磁通切换和轴向磁场永磁电机有效结合起来的轴向磁场磁通切换永磁电机(AFFSPM),AFFSPM 电机结合了永磁同步电机和磁通切换电机的特点,具有结构简单、体积小、控制灵活、高效率、高功率密度等优点,非常适合用于电动汽车。
本文针对轴向永磁轮毂电机,分析盘间距固定时的传动性能,推导出磁密、转矩、传动效率等数学公式,模拟启动过程中的转矩、转速、涡流损耗等启动性能以及启动完成后的磁密、传动效率等工作性能,并搭建
模拟的轮毂电机传动性能测试平台对分析结果进行测量验证。
2 结构及理论计算
轴向永磁轮毂电机中,轴向永磁轮毂电机传动核心由铜导体盘和永磁体盘组成,以铜导体盘作为主动盘连接电动机,以永磁体盘连接离心式风机作为从动盘。电动机输出恒定转速,离心式风机的负载转矩与其转速的二次方成正比(即),K称为变负载系数。
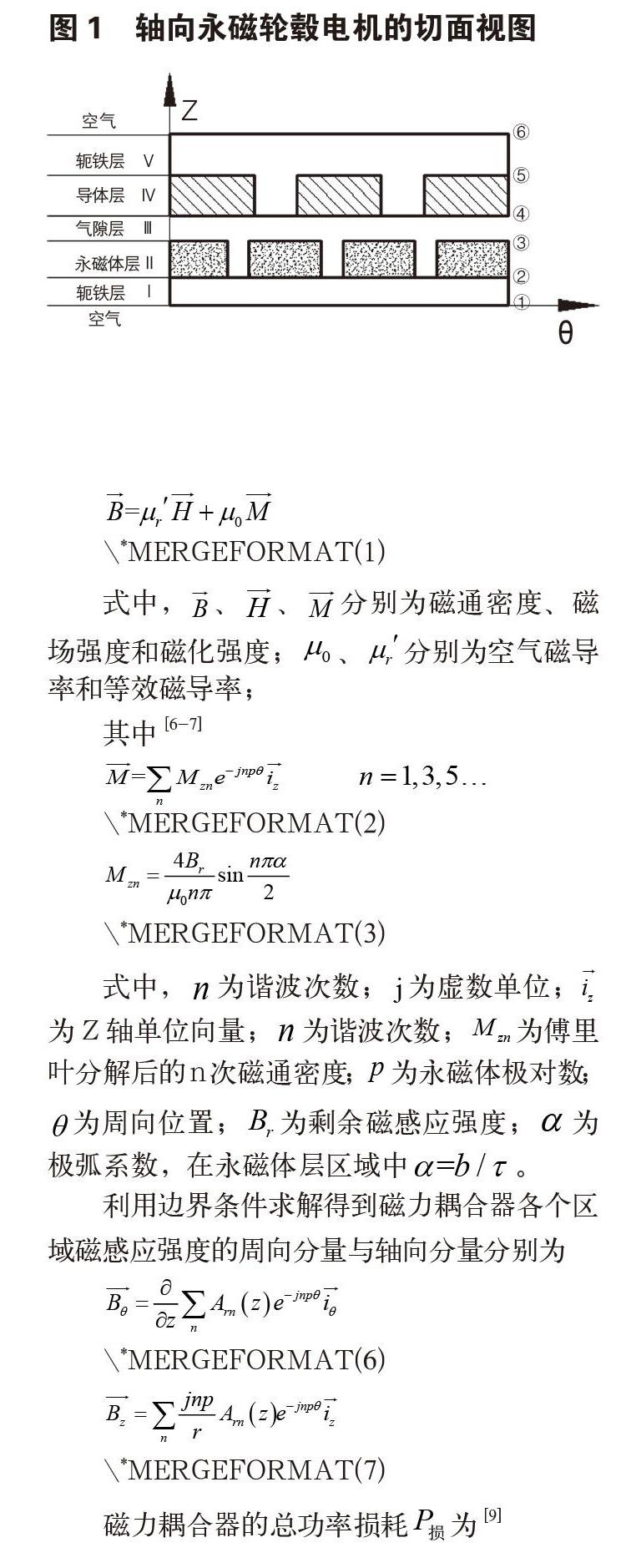
将轴向永磁轮毂电机转化成图1中二维视图进行分析,将模拟的轴向永磁轮毂电机沿着径向切开,然后在平均半径处周向展开,将扇形的永磁体和铜导体等效成矩形进行计算,图1为根据上述假设建立的轴向永磁轮毂电机切面视图,其中Ⅰ、Ⅴ区域是轭铁,Ⅱ区域是空气和永磁体,Ⅲ区域是气隙,Ⅳ区域是轭铁和铜导体,边界①为永磁体盘轭铁层Ⅰ与空气的边界,边界②为永磁体盘轭铁层Ⅰ与永磁体层Ⅱ的边界,边界③为永磁体层Ⅱ与气隙层Ⅲ的边界,边界④为气隙层Ⅲ与导体层Ⅳ的边界,边界⑤为导体层Ⅳ与导体盘轭铁层Ⅴ的边界,边界⑥为导体盘轭铁层Ⅴ与空气的边界。在展开的二维模型坐标系中,以边界①为轴,径向切开线为Z轴,坐标原点为边界①与径向切开线的交点。假设导体盘为主动盘,永磁体盘为从动盘,计算初始条件为:永磁体盘转速为零,导体盘相对永磁体盘沿轴心作旋转运动,相对角速度为,其中为磁力耦合器的滑差率,为导体盘的实际角速度。
在磁性材料中,磁通密度、磁场强度和磁化强度的关系式为
\*MERGEFORMAT(1)
式中,、、分别为磁通密度、磁场强度和磁化强度;、分别为空气磁导率和等效磁导率;
其中[6-7]
\*MERGEFORMAT(2)
\*MERGEFORMAT(3)
式中,为谐波次数;为虚数单位;为Z轴单位向量;为谐波次数;为傅里叶分解后的n次磁通密度;为永磁体极对数;为周向位置;为剩余磁感应强度;为极弧系数,在永磁体层区域中。
利用边界条件求解得到磁力耦合器各个区域磁感应强度的周向分量与轴向分量分别为
\*MERGEFORMAT(6)
\*MERGEFORMAT(7)
磁力耦合器的总功率损耗为[9]
\*MERGEFORMAT(8)
式中,为边界4的Z轴坐标;为边界5的Z轴坐标(见图2)。
磁力耦合器的总转矩为[10]
\*MERGEFORMAT(9)
为轴向永磁轮毂电机的输出转矩;为轴向永磁轮毂电机的总功率损耗;为铜导条的平均半径;为铜导条的径向有效长度;为导体盘区域的等效电导率;为气隙区域的矢量磁位;为周向单位长度;为周向单位长度;为虚数单位;为谐波次数;为永磁体极对数;为滑差率;为输入轴的角速度。
\*MERGEFORMAT(10)
式中,为系统输入功率;为离心式风机输出功率;为涡流损耗;为调速系统的工作效率;为离心式风机的转速。
3 三维有限元模型的建立及求解
3.1 轴向永磁轮毂电机的结构参数
在有限元分析软件Magnet中建立轴向永磁轮毂电机的三维模型,将电动机和输入轴简化为输入速度和输入转矩加载导体盘上,将风机或泵类变负载装置简化为负载函数加载在永磁体盘上。轴向永磁轮毂电机模型由导体盘轭铁、铜导体、空气、永磁体及永磁体盘轭铁组成,图2为利用Magnet有限元分析软件建立的三维模型爆炸图。导体盘轭铁和永磁体轭铁材料为10号钢,电导率为,相对磁导率为2000;永磁体的材料为钕铁硼,其矫顽力为,相对磁导率为1.05;铜导体的材料为紫铜,电导率为,相对磁导率为1.0;空气的相对磁导率为1.0。
3.2 启动性能的影响分析
对于该轴向永磁轮毂电机,设定导体盘为主动盘,永磁体盘为从动盘,盘间距為5mm,从动盘上添加离心式变负载函数,风机负载值和其转速的平方成正比,正比系数即离心式风机的变负载系数。为了使系统迅速且稳定地进入工作状态,拥有最佳的启动性能,模拟不同变负载系数下启动过程中的转矩波动和速度响应情况,分析系统在不同变负载系数和不同输入转速时的启动性能。
3.2.1 变负载系数的影响
取变负载系数K分别为0.0006、0.0012、0.0018、0.0024、0.0030、0.0036进行分析。图3为不同变负载系数时系统启动过程中转矩随时间的变化情况,在不同变负载系数下,系统刚启动的一瞬间的启动转矩均较大,随后转矩值由40N·m左右开始小幅度波动增加至50N·m左右,启动能力较强,之后系统在不同变负载系数下的情况不同。以变负载系数K为0.0006为例,系统转矩在400ms时的54N·m突降至5N·m,产生转矩振荡,然后小幅回调至12N·m并稳定运行,启动过程中的这种严重的转矩振荡不利于精密调速系统的工作稳定性和寿命,随着变负载系数K值由0.0006逐渐增加,系统启动过程中的转矩振荡逐渐减小。
这是因为系统刚启动瞬间主、从动盘的转差率非常大,铜导体感应产生强大的感应涡流,涡流的感应磁场对原磁场具有削弱作用,随着启动过程转差率减小,涡流降低,磁场强度增大,此时涡流减小对电磁转矩的增幅作用超过转差率减小对电磁转矩的降幅作用,转矩略微增大;当启动一定时间后主、从动盘的转差率比较低时,涡流已非常小,涡流减小对电磁转矩的增益作用等于转差率降低对电磁转矩的削弱作用,此时为转矩最大值点;随着转差率进一步降低至即将稳定时,涡流的影响已经很小,电磁转矩几乎完全由转差率决定,而细微的转差率变化都会导致电磁转矩的大波动,所以出现转矩的大幅度振荡,因振荡的幅度与转矩最大值和稳定运行时的转矩值有关,所以随着K值增大,转矩振荡逐渐减小。
图4为不同变负载系数K时系统启动过程中转速随时间的变化情况,为了便于分析,定义输出转速在最终稳定输出转速的0.2%波动范围内为稳定运行,启动时间指系统启动至稳定运行的时间,平均加速度等于稳定运行时的输出转速除以启动时间,与电磁转矩和负载转矩的差值有关,反映系统的启动性能。不同变负载系数下系统的启动性能参数见表1。当K值由0.0006逐渐增加至0.0036时,虽然输出转速由1440rpm逐渐降低至1130rpm,启动时间却由476ms逐渐增加到1278ms,随后小幅减少至1216ms;随着K的增大,负载端平均加速度由317减小到97.4。这是因为负载转矩和输出转速的平方成正比,随着K值越大,启动过程中负载转矩的增大得更快,而电磁转矩相差不大,导致加速转矩降低,启动速度随之降低。
3.2.2 输入转速的影响
分别取输入转速分别为450rpm、650rpm、850rpm、1050rpm、1250rpm、1450rpm进行分析。图5为不同输入转速时系统启动过程中转矩随时间的变化情况,在不同输入转速下,系统刚启动的一瞬间的启动转矩均较大,且输入转速越大,初始瞬间的转矩越小,随后转矩小幅度振荡并增加至最大值,转矩增加至最大值后转矩突然大幅震荡至稳定转矩并稳定运行。输入转速越大,启动过程中的转矩振荡幅度越小。这是因为系统刚启动瞬间主、从动盘的转差率非常大,铜导体感应产生强大的感应涡流,此时涡流产生的感应磁场对原磁场严重削弱,涡流对转矩的增益作用大于转速差提高对转矩的削弱作用,所以启动初期转速差越大,转矩相对越小;启动过程中转矩先小幅提升至最大值后发生大幅振荡的原因与图3.5中相同,因为输入转速越大,稳定工作时的转差率和转矩越大,转矩由最大值振荡至稳定值时的幅度越小。
图6为不同输入转速下,系统启动过程中输出转速随时间的变化情况。当输入转速由450rpm增加到1450rpm过程中,输出转速由446rpm增加到1364rpm,启动时间由144ms增加到1278ms。因输入转速不同,比较启动时间有一定的局限性,表2中列出了不同输入转速下负载端的启动平均加速度,随着输入转速的增加,负载端平均加速度由359.3减小到111.8,系统启动过程的加速能力逐渐降低,这是因为系统在不同输入转速下启动时,启动初期的转矩具有决定性影响,而输入转速越大,启动初期的转矩相对越小,所以随着输入转速增大,系统的启动加速能力逐渐降低。
3.3 启动完成后稳定时的工作性能分析
3.3.1 磁密的影响
由图7可知,变负载系数取0.0006、0.0012、0.0018、0.0024、0.0030、0.0036时的气隙磁密值分别为0.6514T、0.6499T、0.6461T、0.6404T、0.6316T、0.6192T。气隙磁密值随着变负载系数K的增大而非线性降低,这是因为当变负载系数K值增加,导体盘因切割磁力线产生的感应磁场增加,对原永磁磁场的削弱作用增加,导致永磁体利用率降低,相同的磁能积产生的磁密减小,永磁体利用率降低。
由圖8可知,输入转速450rpm、650rpm、850rpm、1050rpm、1250rpm、1450rpm时的气隙磁密值分别为0.6825T、0.6740T、0.6683T、0.6559T、0.6453T、0.6316T。气隙磁密值随着输入转速的增大而非线性降低,这是因为输入转速增加导致主、从动盘的转速差增加,电磁转矩随之增加,带动负载端加速,负载端的速度提高导致负载转矩的增加,直到负载转矩等于电磁转矩,系统在更高的转速、转矩下处于平衡状态,而更大的转矩意味着涡流和感应磁场必然增强,从而对原永磁磁场的削弱作用增加,磁密降低。
3.3.2 转矩、转速、涡流损耗和传动效率的影响
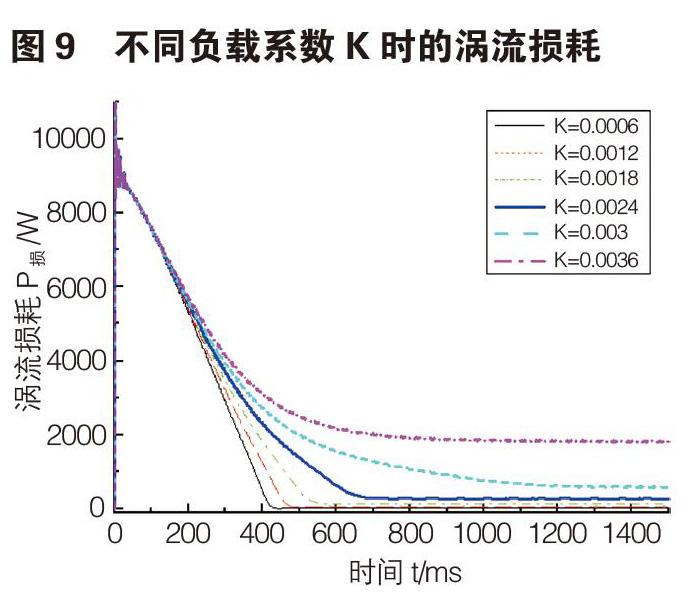
图9为不同变负载系数时涡流的分布情况和涡流损耗的大小,随着K由0.0006增加至0.0036,涡流损耗由13.2W增加至1809.2W,增幅逐渐增大,系统功率损耗逐渐增大,从而导致工作效率降低。图10为不同输入转速时涡流的分布情况和涡流损耗的大小,随着输入转速由450rpm增加至1450rpm,涡流损耗由2.6W增加至589.7W,增幅逐渐增大,系统涡流损耗逐渐增大,工作效率降低。
表3为不同变负载系数K时,轴向永磁轮毂电机在稳定工作时的转矩、转差率和工作效率。当变负载系数K由0.0006增大到0.0036时,转矩由11.5N·m增大到60.5N·m后减小至51.9N·m;转差率由0.62%逐渐增大到22%,由式(10)计算系统工作效率由99.2%逐渐降低至77.3%,这是因为转速差随着K的增大而增大,导致涡流损耗增大,更大比例的能量以涡流发热的形式浪费掉,工作效率降低;表4为不同输入转速时,轴向永磁轮毂电机在稳定工作时的转矩、转速差和工作效率。当输入转速由450rpm逐渐增大到1450rpm时:转矩由4.1N·m逐渐增大到60.5N·m,;转差率由0.89%逐渐增大到5.93%,效率由98.7%逐渐降低至93.6%,这是因为转速差随着输入转速的增大而增大,涡流损耗增大,导致工作效率降低。
4 传动性能测试分析
4.1 传动性能测试平台的搭建
针对轴向永磁轮毂电机的传动性能,搭建轴向永磁轮毂电机传动性能测试平台(图11),负载端连接离心式风机,固定盘间距不变,测量输入转速不同时系统的稳定输出转速、转矩和传动效率等工作参数。风机变负载系数,输入转速为900rpm,将固定盘间距为26mm,测量系统稳定运行的输入转矩、输出转矩、输入转速和输出转速,计算系统的输入功率、输出功率和传动效率;然后降低输入转速为750rpm、600rpm、450rpm和300rpm,测量不同输入转速下转速、转速和工作效率等工作参数。
4.2 实验结果分析
表5为不同输入转速时系统的工作参数,在轴向永磁轮毂电机各项结构参数不变的情况下,随着输入转速由300rpm增大至900rpm,输出转速由276rpm增大到610rpm后降低到603rpm,转矩由0.3N·m增大到1.6N·m后减小到1.5N·m,750rpm时为极值点;传动效率随着输出转速的增大由92%非线性降低至67%。实验结果与理论模拟有较好的一致性。
5 结论
本文针对轴向永磁轮毂电机的传动性能进行研究,结论如下:
1)对于系统的启动性能。随着变负载系数K的增大,启动过程中转矩振荡幅度减小,但启动加速度降低,启动能力变差;随着输入转速的增大,转矩振荡幅度减小,但启动加速度降低,启动能力变差。
2)对于系统启动完成后稳定运行时的工作性能。随着变负载系数K的增大,气隙磁密降低,稳定运行时的转矩波动、转差率和涡流损耗增大,系统的工作效率逐渐降低;随着输入转速增大,气隙磁密降低,系统稳定运行时的转矩波动、转差率和涡流损耗逐渐增大,系统的工作效率降低。
参考文献:
[1]谢颖,黑亮声,华邦杰,等.电动汽车用永磁游标电机的设计与研究[J].浙江大学学报,2018,52(1):1.XIE Ying,HEI Liangsheng,HUA Bangjie,et al. Design and re-search of permanent magnet vernier motor for electric vehicle[J].Journal of Zhejiang University,2018,52(1):1.
[2]POLIKARPOVA M,PONOMAREV P,LINDH P,et al. Hybrid cooling method of axial-flux permanent magnet machines for vehi-cle applications[J].IEEE Transactions on Industrial Electronics,2015,62(12):7382.
[3]WOOLMER T J,MCCULLOCH M D.Analysis of the yokeless and segmented armature machine[C]//IEEE International Electric Machines& Drives Conference,May 3-5,2007,Antalya,Tur-key. 2007:704-708.
[4]ZHANG B,SEIDLER T,DIERKEN R,et al. Development of a yokeless and segmented armature axial flux machine[J].IEEE Transactions on Industrial Electronics,2016,63(4):2062.
[5]Hua W,Cheng M ,Zhu Z Q,et al. Analysis and optim ization of back EM F w aveform of a flux-sw itch per-manent magnet motor[J].IEEE Transaction on Energy Conversion,2008,23(3):723 733.
[6]Zhu Z Q,Cheng J T . Advanced flux-sw itching permanent magnet brushless machines [J]. IEEE Transac-tions on Magnetics,2010,46(6):1447 1452.
[7]Lin M ingyao,Li Hao,Li Xin,et al. A novel axial field flux-sw itching permanent magnet w ind pow er generator[J].IEEE Transactions on Magnetics,2011,47(10):4457 4460.
[8]Li Hao,Lin M ingyao,Li Wan,et al. Novel dual-rotor axial field flux-sw itching permanent magnet machine[J].IEEE Transactions on Magnetics,2012,48(11):4232 4235.
[9]金小香.電动汽车用永磁轮毂电机的小型化设计[J].科技视界,2015(33):265-266.
