
主体瘦长度对三体船耐波性和波浪载荷的影响
2016-12-12 02:35:10邓琦毛筱菲吴铭浩
中国舰船研究 2016年6期
邓琦,毛筱菲,吴铭浩
1海军装备部舰船办公室,北京100071
2武汉理工大学交通学院,湖北武汉430063
主体瘦长度对三体船耐波性和波浪载荷的影响
邓琦1,毛筱菲2,吴铭浩2
1海军装备部舰船办公室,北京100071
2武汉理工大学交通学院,湖北武汉430063
针对某千吨级三体船母型船,在保持排水量不变的前提下,调查长宽比对运动和载荷的影响,并通过船型变换得到长宽比在12~19之间的6种系列派生船型;应用三维时域Rankine方法软件WASIM对不同长宽比系列船体的纵向运动和波浪载荷进行频响计算,并进一步结合海浪谱分别计算4~6级海况下船体纵摇和升沉运动统计值以及船体剖面弯矩和剪力沿船长单位的分布。分析发现,当主体长宽比从12.27增加至19.16时,纵摇和升沉的最大峰值分别下降了近60%和35%,但剪力和弯矩的峰值则分别增大了2倍和3.5倍。进一步将直接计算的总纵弯矩和剪力与英国劳氏规范相比较,发现6级海况下剖面剪力有义值的计算结果已超过规范的规定。结果表明:主船体的长宽比对耐波性和波浪载荷具有相反的影响,即主体越瘦长,运动响应越小,耐波性越好;但主体越瘦长,总纵弯矩和剪力会大幅增加,对船体结构产生不利影响。因此,在设计之初确定瘦长三体船的主尺度,特别是瘦长度时,应兼顾考虑船体运动响应与波浪载荷的影响。
三体船;船型;系列变换;船舶运动响应;波浪载荷
0 引 言
三体船是目前很受军民欢迎的一类高速海洋运载工具,其主船体和2个侧体的结构赋予了其比普通单体船更好的横向稳定性。因此,主体可以设计得比单体船更加细长,这使得其阻力降低,快速性得到了极大的提升,同时对耐波性也有利。根据对现有三体船的调查[1],将三体船的主尺度比(包括主体L/B和B/T)按照排水量大小进行了分布统计,如图1所示。三体船主要参数的范围如表1所示。由表1和图1可以看出,目前三体船主体长宽比L/B的范围在12~18之间,宽度吃水比B/T的范围在1.2~2.3之间,侧体排水量占总排水量的比例ΔS/Δ不超过7%。三体船的主体更瘦长可能会改善耐波性,但是也会增加船体的波浪载荷,影响船舶结构安全。本文将定量分析主要船型参数,特别是主体瘦长度对船舶运动响应和波浪载荷的综合影响。
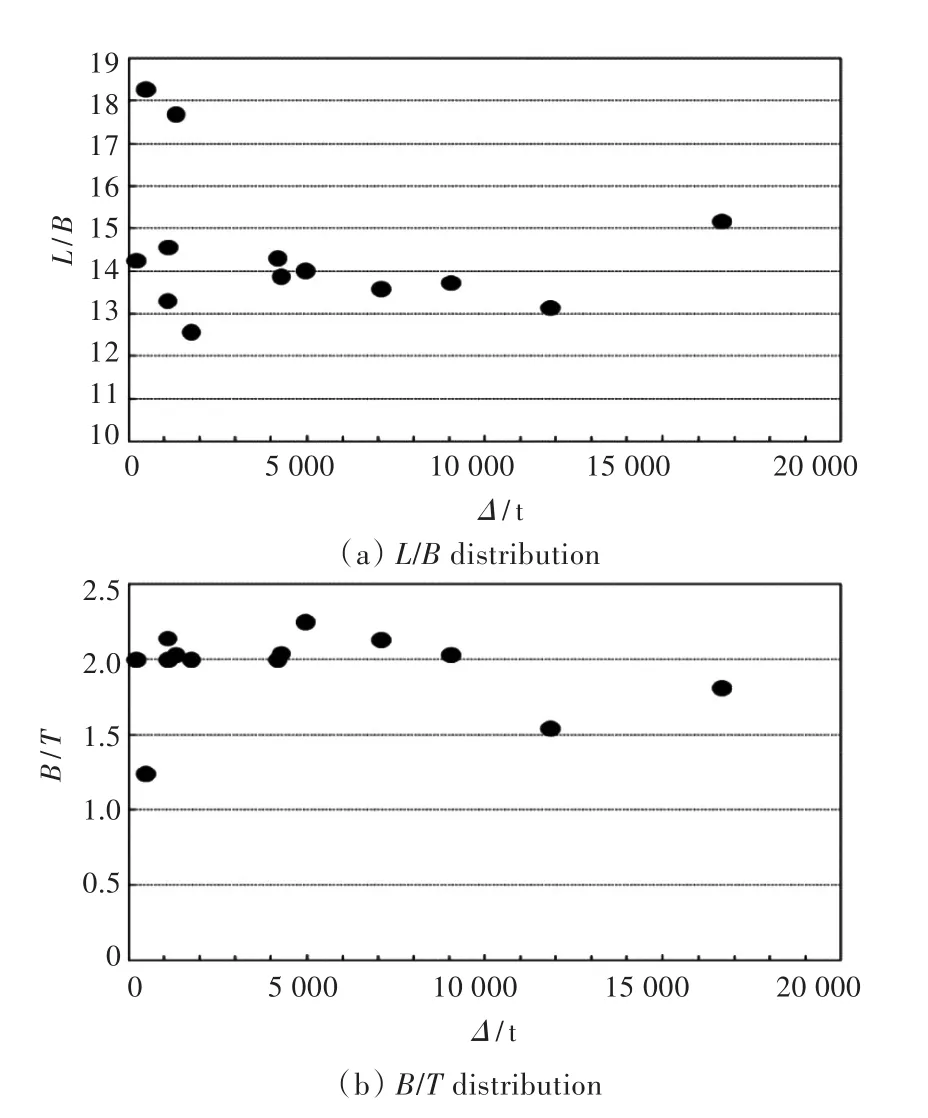
图1 三体船主体主尺度比例系数统计Fig.1 Statistics of L/B,B/T range of trimaran main hull

表1 三体船主要参数变化范围Tab.1 Range of main particulars of trimaran
计算三体船在波浪中的运动响应和载荷一般基于频域和时域势流理论方法,其中频域方法包括脉动源和移动脉动源方法。Fang和Too[2]开发了三维脉动源方法,用于预报船舶六自由度运动;Bingham等[3]运用三维移动脉动源方法得到了三体船在波浪中的运动和载荷,并指出频域方法仅能在Fn<0.45时使用。对于较高航速,Faltinsen和Zhao[4]发展了二维半理论,Duan等[5]将其应用到了多体船耐波性计算;更多的学者运用了时域的方法,包括时域格林函数法和时域Rankine方法,如Peng[6]运用三维时域格林函数法进行了多体船水动力研究,Bruzzone和Grasso[7]综合频域和时域的方法分析了三体船在波浪中运动时的非线性[8]。三维时域Rankine面元法是解决高速多体船耐波性问题的一个有效方法,以该方法为基础的商业软件WASIM被国内外学者用于三体船的运动和载荷预报[1],被公认为是预报有航速三体船的运动和载荷的有力工具。时域方法既可考虑非线性,也适合用于较高航速的情况。
1 船型变换
为了研究三体船主要参数对水动力结果的影响,需要生成一系列新的船型。本文使用Hollister的基于型值的船型变换方法来编制船型变换程序[9],程序包括4个模块:拉伸变换(STRETCH)模块、剖面变换(CMVARY)模块、棱形系数变换(LACKENBY)模块和静水力计算(HYDROSTATICS)模块,流程如图2所示。在4个模块的反复迭代计算过程中,可以保证除目标参数和补偿参数改变外,其他参数均保持不变。本文中因主体的排水量保持一致,侧体占排水量的比例较小,因此仅需进行缩放变换、调整水线、重新定位即可,且变换前、后片体之间的相对位置不发生改变。保持主体排水量不变,系列变换派生出的6种船型参数如表2所示。

图2 船型变换流程图Fig.2 Workflow chart of trimaran hull variation
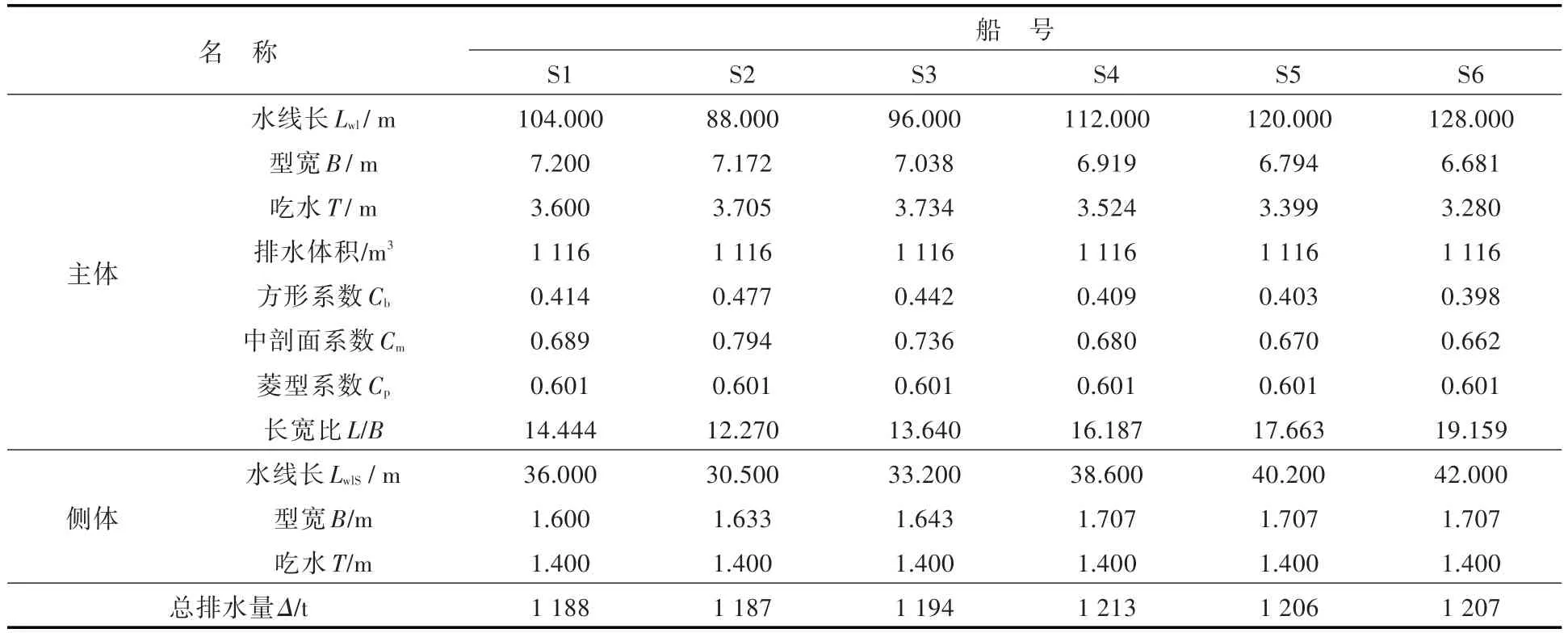
表2 系列变换派生船型参数Tab.2 Parameters of variated trimaran hulls
2 运动及载荷计算
2.1 数值计算方法
采用WASIM对三体船在波浪上的运动和载荷进行计算能够得到较好的结果。在本研究中,纵向运动和波浪载荷均在迎浪状态下计算,通过谱分析法来得到特定海况下的纵摇、升沉、垂向弯矩和剪应力。所有计算船速均保持其傅汝德数Fn=0.322。6条派生船型的质量分布如图3所示,船的片体布局如图4所示,片体尾部形状均为方尾。

图3 质量分布Fig.3 Mass distribution

图4 S1,S2,S6号船片体分布Fig.4 Arrangement of S1,S2 and S6 ships
2.2 规则波中运动和载荷的传递函数
针对6艘派生船型,计算了迎浪规则波中的运动和载荷响应,保持排水量不变,6个不同长宽比派生船型的运动和载荷的传递函数比较如图5~图9所示。图中,横坐标ω表示波浪圆频率,纵坐标分别为升沉、纵摇以及典型位置横剖面的剪力及弯矩的无因次传递函数。

图5 升沉无因次传递函数随长宽比的变化Fig.5 The change of heave transfer function with L/B
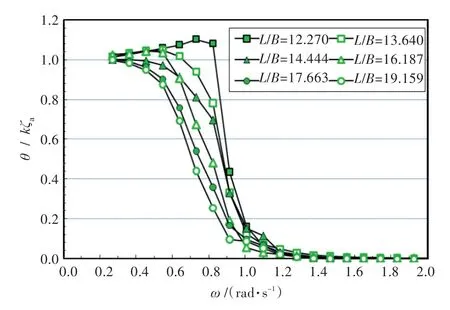
图6 纵摇无因次传递函数随长宽比的变化Fig.6 The change of pitch transfer function with L/B
通过对升沉和纵摇运动频响的分析发现,随着L/B的增大,主体越瘦长,纵摇和升沉运动响应峰值下降的幅度就越大。当L/B>14.444时,纵摇
传递函数未出现明显的峰值点。可见主体越瘦长,规则波中的运动响应越小,耐波性也越好。
因不同长宽比船型的载荷比较是通过各剖面载荷沿船长的短期预报分布来进行,所以,有必要进行耐波性和波浪载荷的短期预报。

图7 5号站剪力传递函数随长宽比的变化Fig.7 The change of shear force transfer function with L/B at station 5

图8 10号站弯矩传递函数随长宽比的变化Fig.8 The change of bending moment transfer function with L/B at station 10
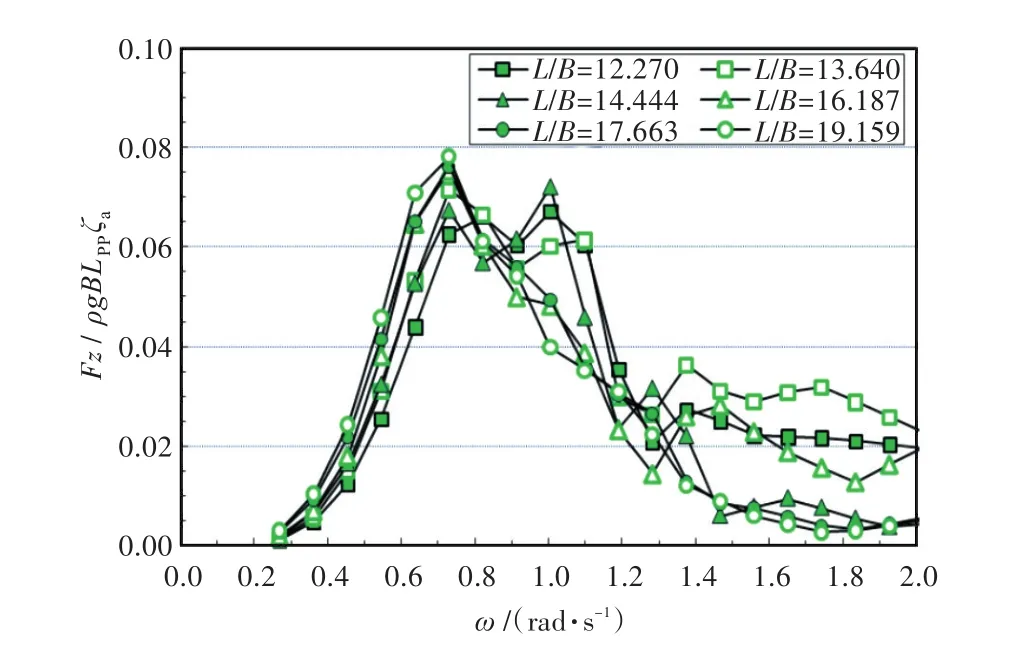
图9 15号站剪力传递函数随长宽比的变化Fig.9 The change of shear force transfer function with L/B at station 15
2.3 不规则波中短期预报分析
2.3.1 纵摇、升沉运动统计值预报
短期预报基于的是谱分析法,本文使用Pierson-Moscowitz海浪谱:
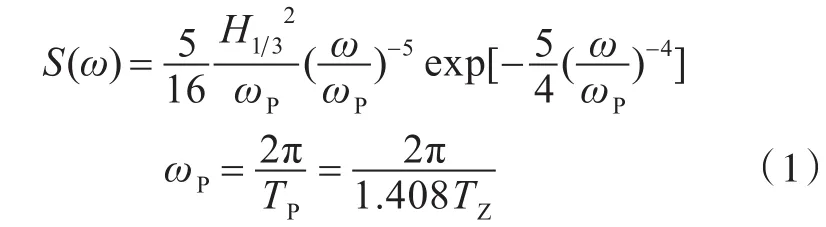

图10 不同长宽比单位波高升沉有义值比较(H1/3=1 m)Fig.10 Comparison of heave short-term response of differentL/B(H1/3=1 m)
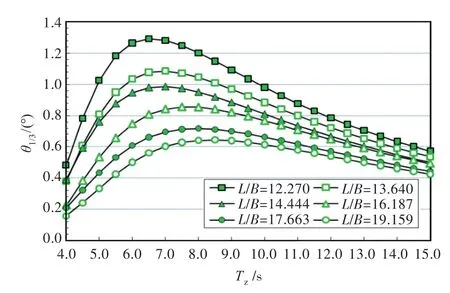
图11 不同长宽比单位波高纵摇有义值比较(H1/3=1 m)Fig.11 Comparison of pitch short-term response of differentL/B(H1/3=1 m)

图12 不同长宽比单位波高垂向加速度有义值比较(H1/3=1 m)Fig.12 Comparison of vertical acceleration short-term response of different L/B(H1/3=1 m)
表3统计了6艘派生船型在过零周期Tz=6,8, 10 s和有义波高H1/3=1 m时的运动与加速度。由表可发现,较大L/B船在迎浪航行时在耐波性方面体现出了明显的优势。在过零周期Tz=6 s时,S6的升沉运动响应减小了34.5%,纵摇运动响应减小了60.3%,艏部垂向加速度减小了50.8%,这说明主体越瘦长,L/B越大,不规则波中的运动越缓和,对耐波性越有利。
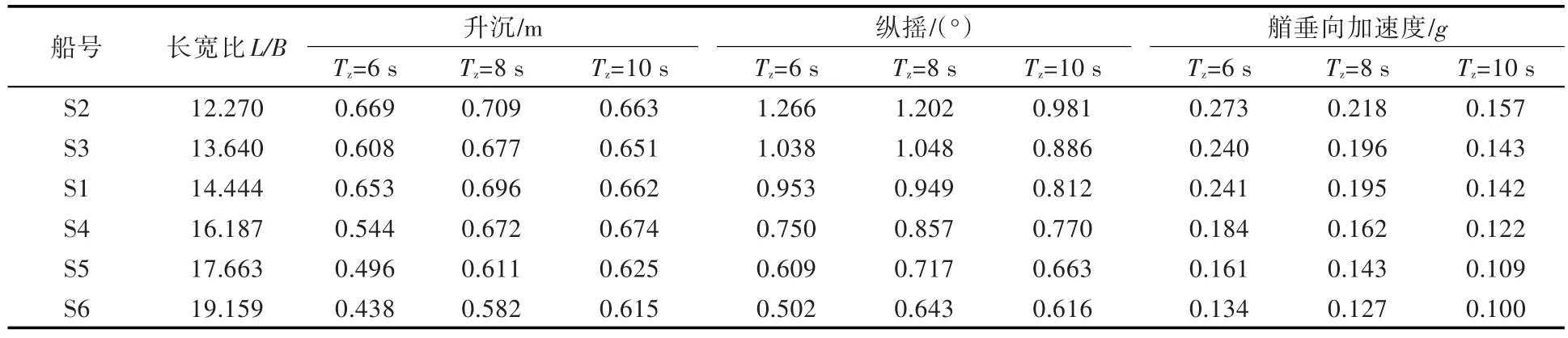
表3 单位有义波高短期预报统计(H1/3=1 m)Tab.3 Short-term statistics of trimaran motion in unit siginificant wave height(H1/3=1 m)
2.3.2 垂向剪力与弯矩短期预报
本文计算了4~6级海况下的总体结构载荷,其中4级海况下的有义波高H1/3=2 m,过零周期Tz=6 s;5级海况下的有义波高H1/3=3 m,过零周期Tz=8 s;6级海况下的有义波高H1/3=5 m,过零周期Tz=10 s。不同长宽比L/B下各横剖面垂向剪力和弯矩的比较如图13~图18所示。

图14 5级海况不同长宽比各站垂向剪力比较(Tz=8 s,H1/3=3 m)Fig.14 Comparison of vertical shear force of different L/B in sea state 5(Tz=8 s,H1/3=3 m)
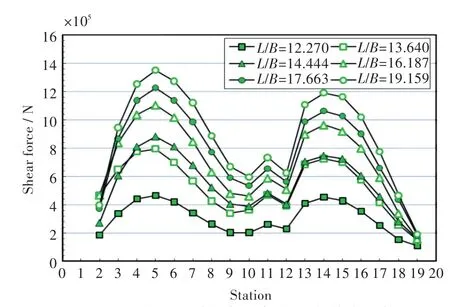
图15 6级海况不同长宽比各站垂向剪力比较(Tz=10 s,H1/3=5 m)Fig.15 Comparison of vertical shear force of different L/B in sea state 6(Tz=10 s,H1/3=5 m)

图16 4级海况不同长宽比各站垂向弯矩比较(Tz=6 s,H1/3=2 m)Fig.16 Comparison of vertical bending moment of different L/B in sea state 4(Tz=6 s,H1/3=2 m)
表4列出了不同长宽比下各剖面剪力和弯矩最大值。与S2(L/B=12.27)相比,S6(L/B=19.16)剖面上的最大剪力在4级海况下增加了112.8%,5级海况下增加了171.7%,6级海况下增加了190.1%;最大弯矩在4级海况下增加了208.5%,6级海况下增加了345.6%。由此可见,主体瘦长度的增加将导致总体结构载荷大幅度增加。

图17 5级海况不同长宽比各站垂向弯矩比较(Tz=8 s,H1/3=3 m)Fig.17 Comparison of vertical bending moment of different L/B in sea state 5(Tz=8 s,H1/3=3 m)
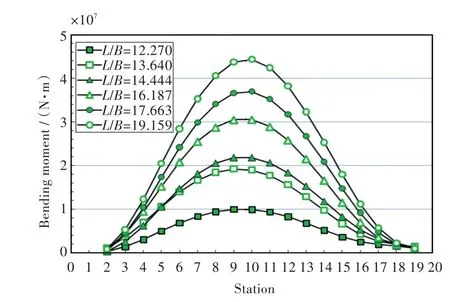
图18 6级海况不同长宽比各站垂向弯矩比较(Tz=10 s,H1/3=5 m)Fig.18 Comparison of vertical bending moment of different L/B in sea state 6(Tz=10 s,H1/3=5 m)

表4 不同长宽比各剖面载荷最大值Tab.4 Maximum sectional load of different trimaran hulls
表5列出了典型海况下最小和最大长宽比船型的耐波性和载荷比较结果。由表5可知,4级海况下,S6的纵摇运动响应比S2减小了60.35%,但最大弯矩值增加了208.54%,载荷产生了很大的改变,可见过于细长的主体对结构载荷非常不利。

表5 船体运动和载荷有义值Tab.5 Summary of typical significant values of motion and load
3 载荷直接计算与英国劳氏规范(LR)比较
出于对船舶安全的考虑,英国劳氏规范(LR)[10]制定了总体载荷规范。垂向弯矩和剪力的计算公式如下:

式中:Df和Kf分别为弯矩和剪力的分布因子;Ft为与中拱和中垂相关的系数;M0为与规范船长LR、船宽和方形系数有关的系数。
图19对比了由LR规范方法和本文方法计算的S5,S6派生船在6级海况下的载荷分布。由图可见,该两船的弯矩计算值与规范中的设计载荷非常接近,最大值还有可能超过规范设计值;剖面剪力有义值的计算结果则已经超过了规范的规定。这表明,过分细长的船体有可能会导致总体载荷增加,若要考虑船体强度安全,势必增加船舶在高海况条件下的航行安全风险和工程造价。
4 结 论
本文基于调查获取的细长三体船主体瘦长度
变化范围,使用基于型值的船型变换方法,在保证主船体排水量和菱形系数不变的情况下,得到了一系列派生船型。通过对6条派生船型方案在迎浪下的运动响应和波浪载荷的直接计算,以及总纵载荷与LR规范的比较,得到以下结论:

图19 6级海况下S5和S6号船的垂向载荷计算与LR规范的比较(Tz=10 s,H1/3=5 m)Fig.19 Comparison between design loads in LR and calculated vertical loads of S5 and S6 ship in sea state 6(Tz=10 s,H1/3=5 m)
1)三体船主片体的长宽比L/B一般介于12~18之间,随着L/B的增加,传递函数和短期预报结果均表明船舶在迎浪状态下其升沉和纵摇运动会减小,说明主体越细长,耐波性越好。
2)主体瘦长度对纵向波浪载荷的影响与对运动的影响相反,是随着长宽比的增加而大幅增加,主体过于瘦长对总体结构载荷不利,海况越高,载荷增幅越大。
3)三体船细长的主体对阻力和耐波性有利,但有可能会导致结构载荷在高海况下大幅度增加,超过规范设计值,在优化三体船运动时导致较高的总体结构载荷,所以在进行瘦长的三体船主体尺度方案设计时,应同时权衡船舶耐波性和纵向波浪载荷的综合影响。
[1] 项久洋.船型要素对三体船耐波性和波浪载荷影响的数值计算[D].武汉:武汉理工大学,2008. XIAGN Jiuyang.The numerical calculation of trimaran s seakeeping and wave loads affected by hull form factors[D].Wuhan:Wuhan University of Technology,2008.
[2] FANG M C,TOO G Y.The effect of side hull arrangements on the motions of the trimaran ship in waves[J]. Naval Engineers Journal,2006,118(1):27-37.
[3] BINGHAM A E,HAMPSHIRE J K,MIAO S H,et al. Motions and loads of a trimaran travelling in regular waves[C]//FAST 2001 The 6th International Conference on Fast Sea Transportation.[S.l.:s.n.],2001.
[4] FALTINSEN O,ZHAO R.Numerical predictions of ship motions at high forward speed[J].Philosophical Transactions of the Royal Society A:Mathematical,Physical and Engineering Sciences,1991,334(1634):241-252.
[5] DUAN W Y,HUANG D B,HUDSON D A,et al.Comparison of two seakeeping prediction methods for high speed multi-hull vessels[C]//FAST 2001 6th International Conference on Fast Sea Transportation.[S.l.:s. n.],2001.
[6] PENG H X.Numerical computation of multi-hull ship resistance and motion[D].Halifax:Dalhouse Universty,2001.
[7] BRUZZONE D,GRASSO A.Nonlinear time domain analysis of vertical ship motions[J].Archives of Civil and Mechanical Engineering,2007,7(4):27-37.
[8] SHIN Y S,BELENKY V L,LIN W M,et al.Nonlinear time domain simulation technology for seakeeping and wave-load analysis for modern ship design[C]//ABS Technical Papers 2003.[S.l.:s.n.],2003:257-281.
[9] HOLLISTER S M.Automatic hull variation and optimization[C]//The Meeting of the New England Section of the Society of Naval Architects and Marine Engineers,1996.
[10] Lloyd's Register.Rules for the classification of trimarans[S].Britain:Lloyd's Register,2016.
Effect of principal dimensions on seakeeping and wave loads of trimarans
DENG Qi1,MAO Xiaofei2,WU Minghao2
1 Ship Office,Naval Armament Department of PLAN,Beijing 100071,China
2 School of Transportation,Wuhan University of Technology,Wuhan 430063,China
In this paper,an investigation is carried out on how the hull form and arrangement influence the seakeeping and global hull girder loads of a trimaran.By means of a ship hull variation method,a series of derived trimarans with the same displacement and different length to breadth ratio(L/B)from 12 to 19 is generated for a 1 000 tons trimaran.The longitudinal motion and wave load of the ships with forward speed in regular wave are calculated with the WASIM code based on a time-domain three dimensional Rankine method.The statistics of the pitch and heave motion,sectional bending moment and shear force of the hull girder are analyzed combining the wave spectrum in sea state 4 to 6.It is observed that as the L/B increases from 12.27 to 19.16,the peak value of pitch and heave motion is decreased by nearly 60%and 35% respectively,but the shear force is tripled and the bending moment is increased by 3.5 times.Further direct calculation of the wave loads compared with British LR Rule showed that slender ship section shear significant value have already exceeded the Rules in sea state 6.These results show that the slenderness of the main hull has a contradiction impact on motion and wave load,namely the slender body,the smaller the motion response,the better seakeeping.But the body is slender,total longitudinal bending moment and shear force will increase sharply,more slenderness hull is likely to lead to increase the ship navigation safety risk on the high sea state conditions.There fore,it is important to consider motion behavior and global longitudinal strength together when determining the principal dimensions of trimaran main hulls.
trimaran;hull form;series variation;ship motion response;wave load
U661.3
A
10.3969/j.issn.1673-3185.2016.06.002
2016-09-21
时间:2016-11-18 15:19
邓琦,男,1978年生,硕士,工程师。研究方向:船舶工程毛筱菲(通信作者),女,1962年生,硕士,教授。研究方向:船舶耐波性与波浪载荷。E-mail:mxfzh@whut.edu.cn
http://www.cnki.net/kcms/detail/42.1755.tj.20161118.1519.004.html 期刊网址:www.ship-research.com
邓琦,毛筱菲,吴铭浩.主体瘦长度对三体船耐波性和波浪载荷的影响[J].中国舰船研究,2016,11(6):8-14. DENG Qi,MAO Xiaofei,WU Minghao.Effect of principal dimensions on seakeeping and wave loads of trimarans[J]. Chinese Journal of Ship Research,2016,11(6):8-14.
猜你喜欢
广东造船(2021年2期)2021-05-23 12:16:39
装备制造技术(2020年3期)2020-12-25 05:22:08
广东造船(2016年4期)2016-10-26 09:22:20
船海工程(2015年4期)2016-01-05 15:53:38
应用海洋学学报(2015年3期)2015-11-22 07:39:14
浙江海洋大学学报(自然科学版)(2015年2期)2015-08-28 14:36:40
舰船科学技术(2015年10期)2015-03-12 03:39:28
舰船科学技术(2015年8期)2015-02-27 15:38:44
船舶(2012年4期)2012-08-11 01:48:36
广东造船(2012年5期)2012-04-29 00:44:03
