
基于IM-PSO的大型民用客机载荷减缓控制研究
2016-11-26 08:27:14曲小宇郭腾飞
自动化仪表 2016年8期
曲小宇 郭腾飞
(中国商用飞机有限责任公司上海飞机设计研究院,上海 201210)
基于IM-PSO的大型民用客机载荷减缓控制研究
曲小宇 郭腾飞
(中国商用飞机有限责任公司上海飞机设计研究院,上海 201210)
民用客机在垂直向紊流干扰下,会产生不期望的过载,导致乘坐品质下降。针对这一问题,提出了一种基于IM-PSO优化的载荷减缓控制设计方案。设计了控制副翼、扰流板和升降舵的载荷减缓控制系统,通过自动偏转副翼和扰流板,抵消阵风干扰带来的影响,并通过偏转升降舵,确保飞机的稳定控制。根据系统性能指标选择合适的参考模型,并设定合理的目标函数。最后,应用了IM-PSO算法进行控制器参数的自动寻优。仿真结果表明,基于IM-PSO优化的载荷减缓控制系统,能有效降低阵风干扰,改善飞机的乘坐舒适性,达到了良好的控制效果。
民用客机 载荷减缓 控制 扰动 反馈 滤波器 效果评估 阵风模型
0 引言
在巡航或者机动飞行中,大型民用客机常常因阵风或紊流干扰的影响而产生不期望的气动力与力矩,给飞机带来附加过载。其一方面会降低飞机的飞行品质,不仅使飞机变得难以操纵,而且影响飞行人员和乘坐人员的舒适度;另一方面,其也会使飞机结构承载更大的动态载荷,造成机体的结构疲劳损坏。对于飞机设计,特别是民用飞机设计来说,这是个亟待解决的问题。
在遇到阵风或紊流扰动时,可利用主动控制技术中的载荷减缓控制(load alleviation control, LAC)[1-3],通过控制器自动指令相应的操纵面、减弱阵风或紊流的干扰以及过载的变化,改善乘客的乘坐舒适度[2]。在起飞、着陆、复飞等对轨迹控制要求较高的飞行阶段,载荷减缓控制可以提高飞行轨迹精度,减少因阵风干扰造成的人为操作失误,提高飞机的操稳特性和安全性。
国外两大商用航空制造业巨头——波音公司和空中客车公司已分别在B777和A320上成功应用了载荷减缓控制,达到了改善乘坐品质、减轻结构载荷的目的,取得了较好的收益[1]。在我国的商用飞机领域,对载荷减缓技术的研究还处于起步阶段。针对大型民用客机在巡航以及机动飞行中常因受到阵风干扰而降低乘坐品质的问题,本文提出了基于IM-PSO优化的载荷减缓控制系统。利用主动控制技术减小阵风扰动下引起的附加过载,通过Matlab/Simulink进行数学建模仿真,仿真结果验证了该方法的有效性。
1 问题的提出
1.1 阵风扰动
在自然的大气环境中,由于摩擦、漩涡和地理环境等因素的影响,风扰动往往伴随着紊流。大气紊流的出现和形成也与很多因素有关,例如地形诱导、热量、水气、风切变等。
1.1.1 阵风强度
在民用飞机飞行的过程中,机载传感器测得的风速围绕着测量值进行波动,该值反映了空气的大致运动轨迹;而波动量代表了空气局部的流动,称为紊流,其运动速度以vw来表示。紊流速度是一个随机变量,其平均值μw为零。紊流的均方差定义为:
(1)
式中:σw为紊流速度的标准偏差,又称为均方根值。
紊流速度的均方差或标准偏差与紊流场强度密切相关。按最大紊流速度vwmax进行紊流强度的分级,如表1所示。

表1 紊流强度的分级
1.1.2 阵风模型
在数学定义中,紊流为一种叠加在常值风上的均匀、平稳、各态历经和各向同性的随机过程,该随机过程的统计特性不随时间进行变化。本文只考虑垂直方向的阵风扰动,阵风模型使用德莱顿模型[4]。
德莱顿模型垂直方向风速的功率谱函数如下:
(2)
式中:Ω为空间频率,Ω=2π/λ,λ为正弦波长;σw为阵风分量的标准偏差,w为阵风分量;Lw为紊流的尺度。
由于ω=v0Ω,将式(2)的空间变量转换为时间变量,如式(3)所示:
(3)
此时得到的功率谱函数为有色噪声,不利于计算。为了便于仿真分析,可以引入成型滤波器来产生所需的有色噪声功率谱函数。设一个随机过程x(t),其由单位强度的白色噪声r(t)通过一个传递函数为G(s)的滤波器产生,x(t)的频谱密度函数为:
jx(ω)=G*(jω)G(jω)=|G(jω)|2
(4)
将式(4)所示的频谱密度分解,可得给定频谱密度函数的成型滤波器传递函数:
(5)

(6)

1.2 阵风对飞机运动影响
1.1节所描述的大气紊流,通常以大地坐标系为基准,并且不随时间的变化而变化。但在分析垂直方向紊流对飞机的影响时,在机体坐标系中,紊流不仅随时间发生改变,还随坐标而改变,即在某一时刻,机翼不同位置所受的紊流速度不同;即使是同一位置,在不同时刻所受的紊流速度也不同。这种随时间发生的变化是由于飞机不断向前运动造成的。所以,在研究垂直方向紊流对飞机的影响时,需考虑到飞机Z轴上的紊流梯度分布[4-6]。通常该分布为线性的,即:
(7)
阵风或紊流改变了飞机平衡时的相对气流,从而产生了额外的气动力变化[4-5],影响了飞机运动。这种由于气动改变造成的影响可采用飞机状态方程中状态量的等价变化来表示。在垂直方向,通常认为紊流速度ωg可造成迎角的扰动如下:
Δαg=-ωg/v0
(8)
式中:v0为稳态时的飞行速度。
当把飞机看成质点时,可以忽略梯度对飞机的影响。在垂直方向,此时紊流造成的气动变化可完全等效为Δαg。在飞机的线性运动方程中引入迎角增量Δαg的干扰,此时紊流对飞机运动的影响转化为对迎角α的影响。
2 基于IM-PSO的载荷减缓控制器设计
2.1 免疫粒子群算法
经典的粒子群算法[7-8]在优化的初段可以较快地收敛,但到了优化的后段,该算法可能因陷入局部最优而无法计算出全局最优解。为了增强全局搜索能力,对粒子群算法进行改进,引入免疫算法[9]中的浓度概念。通过刺激低浓度的粒子、抑制高浓度的粒子,保持了粒子的多样性,弥补了经典粒子群法易陷入局部最优的缺点。
免疫粒子群算法(IM-PSO)首先选择一群随机粒子进行初始化,然后通过不断迭代计算,找到最优解,迭代计算包括了粒子的速度和位置。算法每迭代计算一次,通过跟踪粒子本身的最优解和群体最优解,粒子自动更新一次。在找到粒子的两个极值后,根据式(9)和式(10)更新粒子的速度和位置:
vi(n+1)=λ1×Rand1×(Pbest-Xn)+λ2×Rand2(Gbest-Xn)+ω×vi(n)
(9)
Xi(n+1)=Xi(n)+vi(n+1)
(10)
式中:vi为第i个粒子的速度;Xi为第i个粒子的位置;ω为加权数;Rand1和Rand2取0与1之间的随机数;λ1和λ2为学习因子;Gbest为粒子群体最优解的位置;Pbest为粒子本身最优解的位置。
粒子的适应度定义如下:
(11)
式中:c1、c2、c3为加权系数;e(t)为误差值;Tr为调节时间;op为超调量。
设抗体群的粒子种群规模为N,则任一抗体k的浓度为:
(12)
(13)
式中:Hk,j为抗体k,j的信息熵。
2.2 基于IM-PSO的载荷减缓控制器设计
2.2.1 载荷减缓控制器设计
现代民用飞机的飞控系统通常通过飞行员对升降舵、副翼、方向舵和多功能扰流板的操纵,实现飞机姿态和航迹的控制。载荷减缓控制的目的是对飞机进行主动控制。在遇到阵风扰动时,通过设计的控制器自动操纵合适的操纵面,产生与扰动大小相等、方向相反的气动力变化,从而抵消由于阵风影响引起的过载变化和结构载荷增加,改善了乘客的乘坐舒适度。
根据民用飞机总体气动和各个操纵面的特点,本文设计的垂直方向载荷减缓控制系统结构如图1所示。操纵面采用升降舵、副翼和外侧两对多功能扰流板。反馈信号取重心处的法向过载,该信号通过洗出网络反馈给副翼和多功能扰流板指令,提高了飞机在阵风扰动下的乘坐品质。一般情况下,法向过载反馈会增大飞机阻尼,并减小短周期自然频率,延迟飞机对飞行员输入的响应。为此,载荷减缓控制必须与飞机的纵向增稳控制相结合,进行俯仰轴方向的综合设计。此时,引入俯仰角速率信号,通过低通滤波器和洗出网络后反馈给升降舵指令进行控制,以改善飞机的操纵特性,保证飞行品质。载荷减缓控制的各反馈通道均采用了洗出网络,其目的是消除飞机转弯时对稳态加速度和俯仰角速率的影响。

图1 载荷减缓控制设计框图
从图1中可以看出,升降舵的指令为:
δe=Re-G1×G2×Ke×q
(14)
副翼指令为:
δa=Ra-G3×G4×Ka×Nz
(15)
1号多功能扰流板指令为:
δsp1=Rsp1-G3×G4×Ksp1×q
(16)
2号多功能扰流板指令为:
δsp2=Rsp2-G3×G4×Ksp2×q
(17)
2.2.2 基于IM-PSO算法的参数优化
在设计控制器时,当系统的框架确定以后,其控制效果的优劣取决于控制器中参数的定义。由于载荷减缓控制器中的增益参数、滤波器参数和系统所期望的响应之间不存在明显的映射关系,所以在使用IM-PSO算法优化控制器参数时,选择合适的目标函数是亟需解决的难点。本文选择基于参考模型的载荷减缓控制器优化策略,其结构如图2所示。
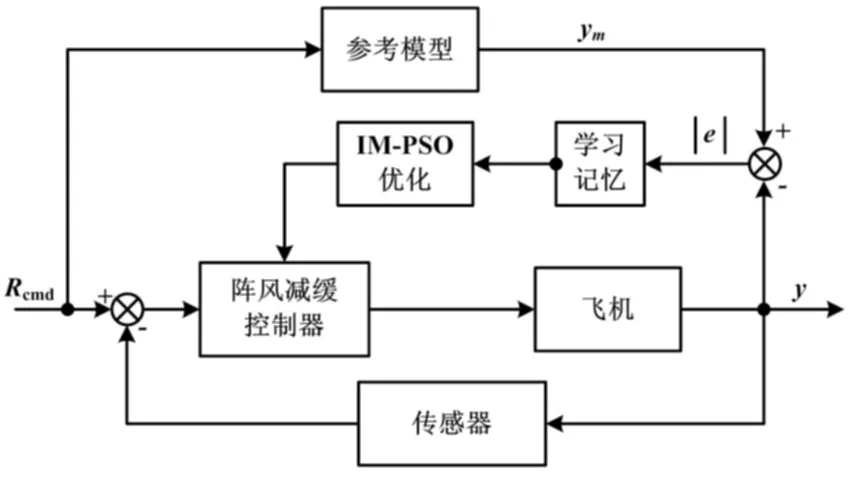
图2 基于IM-PSO的载荷减缓控制器框图
图2中:Rcmd为飞行员指令;y为飞机的输出状态响应;ym为参考模型;|e|为ym与y之差的绝对值,对|e|进行积分,并作为目标函数。因此,IM-PSO算法程序会根据实际输出y与参考输出ym之间的偏差,自动调节控制器参数,直到两者之间的偏差满足性能指标要求时为止,此时控制器参数就是优化所得的结果。
基于IM-PSO的载荷减缓控制器设计的流程如下:①确定载荷减缓控制方案和架构;②根据乘坐品质对性能指标的要求,选择合适的参考模型;③根据飞行品质要求,选择合理的目标函数;④明确种群规模N,单个粒子的随机速度vi和位置Xi,选择合理的学习因子λ1、λ2和加权数ω;⑤求解粒子群的适应度f;⑥对群体最优解Gbest和粒子本身的最优解Pbest进行比较,并更新数值;⑦根据式(10)和式(11),更新粒子的速度和位置;⑧根据式(13)和式(14),计算粒子繁殖率和浓度,对繁殖率低的粒子再初始化,然后重新选出N个粒子;⑨判断寻优过程是否结束,如果达到最大迭代数则寻优结束,否则返回步骤⑤。
2.3 乘坐品质评价
让乘客在阵风环境下也感到舒适是载荷减缓控制的目的之一,因此其也被称为乘坐品质控制。两者的控制效果一样,均采用主动控制技术减少阵风干扰引起的附加过载,并通过衡量阵风干扰下抑制附加过载变化的程度来评估控制效果。
乘坐舒适指标是民用飞机乘坐品质的评价指标,在美国MIL-F-9490D文件中有如下定义:
JRD=kCLα/(W/S)
(18)
式中:(W/S)为机翼上的载荷;CLα为机翼升力对迎角α的导数;k为比例常数。当舒适指标小于0.1时,乘坐人员感到舒适、乘务人员工作轻松;当舒适指标大于0.28时,为了减少阵风扰动对飞机运动的影响,飞行员必须操纵飞机改变飞行状态和航迹。
对于大型民用客机,本文选择C准则作为乘坐品质评价指标[10],具体如下:
C=1.15+6.8az
(19)
式中:az为阵风引起乘客处的法向加速度均方根值。指标C越小,则表明乘坐品质越好。通常,若C<3,乘坐品质、舒适、乘务人员工作轻松;3≤C<4表示舒适度中等;C≥4,表示乘坐品质是不舒适的。
3 仿真验证
基于线性小扰动原理,以某典型飞机为例,给定飞行状态H=6 000m、Ma=0.55,进行配平线性化后,得到飞机在该状态点的线性方程。飞机的翼展长为50.5m,阵风采用德莱顿模型,定义Lw=533.4m,σw的具体数值由相关行标中的曲线给出,仿真中阵风扰动选择中等紊流形式(最大速度12m/s)。
操纵面模型要考虑作动器的舵机特性,以及位置限幅和速率限幅。升降舵δe的偏转范围为-29°~+15°,副翼偏转范围为-25°~+10°。将多功能扰流板0°位置预先偏置在25°,使其具有产生正负升力变化的能力,从而使扰流板的效果偏转范围为±25°。取副翼和升降舵的偏转速率不低于100 (°)/s,扰流板的偏转速率不低于200 (°)/s。
仿真时长为20s,计算方式设置为定步长,采样频率为960Hz。图3(a)是在阵风扰动下的法向过载响应对比曲线,图中虚线是无LAC功能的法向过载响应,实线是有LAC功能的法向过载响应;图3(b)是阵风扰动下的乘坐品质曲线对比曲线,图中虚线是无LAC功能的乘坐指标曲线,图中实线是有LAC功能的乘坐指标曲线。

图3 阵风扰动下的仿真对比图
从图3可以看出,在阵风扰动下,无LAC功能的控制系统法向过载Nz响应最大为0.45 g,对应乘坐品质指标Cmax=4.21,乘坐品质已经为不舒适;有LAC功能的控制系统,采用快速偏转副翼和多功能扰流板的方式来抵消阵风的影响,并通过升降舵的偏转来改善短周期的动态特性,增强飞机的稳定性。最终,法向过载Nz响应最大仅为0.27 g,对应乘坐品质指标Cmax=2.9,乘坐品质为舒适,控制效果显著。
阵风下载荷减缓控制效果评估结果如表2所示。

表2 阵风下载荷减缓控制效果评估结果
从表2中也可以看出,针对阵风扰动,未采用载荷减缓控制设计的控制效果较差,在中等阵风下已经感觉不舒适。而本文所设计的基于IM-PSO优化的载荷减缓控制系统,可以有效地减缓阵风下的不期望的载荷增量,减缓率可以达到40%,从而很好地改善了阵风下的乘坐品质,全程均达到了舒适的指标。这充分说明了本文所设计载荷减缓控制系统的有效性。
4 结束语
针对大型民用客机在大气紊流干扰下,会影响旅客乘坐品质的问题,本文给出了一种基于IM-PSO优化的载荷减缓控制设计方案。在阵风扰动出现时,通过自动操纵相应的操纵面,产生一个大小相等、方向相反的升力变化,抵消了由阵风干扰带来的影响。仿真结果表明,在中等强度紊流干扰下,应用本文提出的设
计方法,能明显降低阵风下的动态扰动,有效保证了旅客的乘坐舒适度,改善了乘坐品质,达到了良好的控制效果。该设计方案为大型民用客机飞控系统的乘坐品质控制提供了一个新的研究方向。
[1] 费玉华.阵风减缓直接升力控制方案的仿真研究[J]. 飞行力学,2000, 18(1):69-72.
[2] 章卫国,李爱军,李广文,等. 现代飞行控制系统设计[M]. 西安:西北工业大学出版社,2009.
[3] MOULIN B, KARPEL M. Gust Loads Alleviation Using Special Control Surfaces[J]. Journal of Aircraft, 2007, 44(1): 17-25.
[4] REAL T R. Digital simulation of atmospheric turbulence for dryden and von Karman models[J]. Journal of Guidance,Control and Dynamics.1993,16(1):132-138.
[5] SKARPETIS M G. Disturbance rejection for an aircraft flying in atmospheric disturbances[J].Dynamics and Control, 1995,5(4):389-400.
[6] KARPEL M. Dynamic response of aeroservoelastic systems to gust excitation[J].Journal of Aircraft,2005,42(5):1264-1272.
[7] 曲小宇. 大型客机迎角保护控制器设计研究[J]. 计算机仿真,2012,29(5):81-85.
[8] KENNEDY J, EBERHART R C. Particle swarm optimization[C]//Proceeding of IEEE International Conference on Neural Networks, Perth, Australia,1995.[9] DASGUPTA D. Artificial Immune Systems and their Applications[J]. Lecture Notes in Computer Science,1998,1(4):121-124..
[10]施毅坚. 大气紊流对飞机法向乘座品质影响的评价方法[J]. 飞行力学,1989(2):25-32.
Design of Load Alleviation Control Law Based on IM-PSO Optimization for Large Civil Aircraft
To solve the problem of ride quality deterioration when large civil aircraft flying in vertical turbulence, which will generate undesirable loads, a gust load alleviation control method based on IM-PSO is proposed.A gust load alleviation control system is designed, which can automatically control aileron and spoiler deflection to offset the turbulence, and control elevator deflection to ensure the system stability at the same time. Then according to the system performance index select appropriate reference model and set suitable objective function. Finally, the Immune-PSO algorithm is introduced to optimize the controller parameters. The simulation results show that the gust load alleviation control law design based on IM-PSO can effectively reduce the gust influence and improve the ride comfort, gaining good control performance.
Civil aircraft Load alleviation Control Disturbance Feedback Filter Effect evaluation Gust model
中国商飞科技创新基金资助项目(编号:CX-2013-9)。
曲小宇(1984—),男,2009年毕业于西北工业大学控制理论与控制工程专业,获硕士学位,工程师;主要从事飞行控制、主动控制技术、仿真及优化算法方向的研究。
TH7;TP273
A
10.16086/j.cnki.issn 1000-0380.201608003
修改稿收到日期:2016-06-23。
猜你喜欢
知识就是力量(2024年3期)2024-03-10 10:43:31
汽车实用技术(2022年9期)2022-05-20 05:49:38
水文地质工程地质(2022年2期)2022-04-13 09:02:34
军事文摘(2021年19期)2021-10-10 13:29:36
军事文摘(2021年17期)2021-09-24 01:11:46
工程与试验(2019年4期)2019-03-27 03:33:06
航空世界(2018年12期)2018-07-16 08:34:50
光学精密工程(2016年1期)2016-11-07 09:02:03
中国铁道科学(2015年4期)2015-06-21 06:46:02
实验技术与管理(2014年12期)2014-03-11 18:38:28
