基于模糊在线识别的并联混合动力客车自适应控制策略
2016-11-24 08:18连静常静李琳辉周雅夫吕仁志黄海洋郑宁安
北京理工大学学报 2016年3期
连静,常静,李琳辉,周雅夫,吕仁志,黄海洋,郑宁安
(大连理工大学 工业装备结构分析国家重点实验室,运载工程与力学学部汽车工程学院,辽宁,大连 116024)
基于模糊在线识别的并联混合动力客车自适应控制策略
连静,常静,李琳辉,周雅夫,吕仁志,黄海洋,郑宁安
(大连理工大学 工业装备结构分析国家重点实验室,运载工程与力学学部汽车工程学院,辽宁,大连 116024)
针对一款并联混合动力客车提出了一种基于模糊在线识别的自适应控制策略.基于自主研发的混合动力车数据采集监控系统构建符合本地车辆实际行驶道路特点的典型工况,设计模糊工况识别算法对车辆实际行驶的工况类型进行在线识别.根据最小等效燃油消耗控制算法和电池电量平衡控制方法,结合工况识别的结果调用相应最优控制参数,对发动机和电池的功率分配进行实时优化计算,实现对整车的控制.实验结果表明,所设计的模糊识别方法能够较好地完成行驶工况类型的识别.基于此所提出的自适应控制方法能够在满足车辆需求功率和电池SOC维持在有效工作区间内的前提下完成发动机和电池的最优功率分配,显著提高整车的燃油经济性.
混合动力车;行驶工况;模糊识别;控制策略
混合动力客车在满足整车动力性能指标的前提下合理地分配各系统部件间的能量以获得最佳性能所依靠最优的能量管理策略是近年来研究的重点与热点.Hui S等[1]利用自适应模拟退火方法,张昕等[2]利用遗传算法,Sundstrom等[3]应用动态规划优化方法均对全局优化控制策略进行了研究.但由于需提前知道包括道路工况等信息在内的整个驾驶循环的信息等原因使全局优化控制策略不能直接用于实车实时控制[4].而现有的瞬时优化控制策略的核心是引入等效因子将每一时刻电池电量的消耗等效为相应的燃油消耗当量[5-6].Serrao等[7]提出在已知工况的条件下选择一个较为准确的等效因子实现等效燃油消耗最小控制策略下的最优能量分配.但在控制过程中未考虑实际道路循环工况的变化对等效因子的影响.Zhang Y等[8]等介绍了神经网络模式式识别方法对工况识别进行了研究,但此识别方法需要大量合适的训练样本才能得到相对准确的识别结果,并且在控制策略开发中所用的参考工况多数采用具有代表性的典型工况对混合动力控制策略进行开发.例如Gurkaynak等[9]通过识别由HWFET和UDDS组合的典型工况来进行自适应控制.而由于车流状况、驾驶习惯和道路网络拓扑情况的不同,每个城市的车辆行驶工况特点也都不同,用其他地区的行驶工况来评价本地的燃油消耗量很难得到准确的评估结果.因此立足于真实的交通环境并构建本地实际行驶工况进行控制策略开发十分必要.
针对以上问题,文中以大连实际行驶道路工况为例,提出了一种基于模糊在线工况识别的自适应实时优化控制策略.首先基于课题组自主研发的混合动力车数据采集监控系统构建符合本地实际行驶道路特征的典型工况;其次,设计模糊识别算法对车辆实际行驶工况进行在线识别,结合最小等效燃油消耗控制算法和电池电量平衡控制方法,制定了工况自适应控制策略,实时优化分配发动机和电机的功率,提高混合动力客车适应性、减小在线实时计算量的同时又能充分发挥自适应控制策略的优势.
1 典型工况构建与识别
1.1 构建4种典型工况
混合动力客车运行线路具有周期性强、重复性显著的特点,所以构建符合本地实际道路特征的典型工况是提高混合动力车燃油经济性、实用性等综合性能的关键.综合考虑城市结构、道路类型及拥挤程度,可将城市工况划分为Stopngo(市中心工况)、Urban(市内较畅通工况)、Suburban(近郊区工况)、Rural(远郊区工况)4种典型工况.
基于自主研发的混合动力车数据采集监控系统,采用行程分析法对大连市混合动力客车原始运行数据进行长时间的采集[10],采用主成分分析技术和聚类技术构建以上4种典型工况.每类行驶工况的构建步骤如下:① 从数据存储软件中提取采集到的混合动力客车运行的原始数据以车辆怠速状态为节点进行运动学片段(车辆从一个怠速始点到下一个怠速始点之间的运行过程)的划分;② 计算每一个运动学片段的特征值参数组成特征值参数矩阵,并运用Matlab软件对特征参数进行主成分分析;③ 在上述主成分分析结果的基础上,根据运动学片段特征值矩阵的特点,通过聚类技术将所有的运动学片段进行归类分析,获得该类工况的优秀片段;④ 最后将这些优秀片段进行先行叠加获得该类行驶工况.所构建的4类典型工况如图1所示.
1.2 行驶工况识别
1.2.1 行驶工况特征参数的选择与提取
综合考虑工况识别实时性、参数重叠及硬件条件限制等因素的影响,对特征参数进行分析筛选,选择能够代表其他大多数参数的平均速度vm、运行平均速度vmr、怠速时间百分比η、平均加速度aa和平均减速度ad作为特征参数进行行驶工况识别.由数据采集系统获取车辆运行信息构建的典型工况是关于实时速度-时间的历程,设置速度采样时间间隔为1 s,由一定时间周期的速度-时间历程提取每个周期内的平均速度vm、运行平均速度vmr(km/h)、怠速时间百分比η、平均加速度aa(m/s2)和平均减速度ad(m/s2)这5个特征参数,其中,工况特征参数计算提取公式为
(1)
式中:i为速度不为0的时间;tacc和tdcc分别为加速及减速时间.
1.2.2 行驶工况模糊识别算法设计
① 模糊聚类中心矩阵.
基于系统优化模糊集理论[11],采用模糊识别算法进行行驶工况识别.
经过行驶工况特征参数提取后的5个特征参数组成待识别的样本矩阵,所以样本具有5个指标,指标向量为[vmvmrηaaad]T.由于矩阵需要进行归一化处理,所以矩阵中只有一组是不能实现归一化处理的,则将标准工况4组参数加入,但是进行识别时只对第一组进行识别.待识别矩阵的指标特征值矩阵表示为
(2)
式中:xij为j指标i的特征值,i=1,2,…,5.
由于5个指标的特征值在量纲级上存在差异,需要对其进行归一化处理
(3)
式中ximax、ximin分别为第i指标的最大特征值和最小特征值;rij为xij的归一化值,范围0≤rij≤1.
根据式(3),代入式(2)从而计算出相对优属度矩阵
(4)
以4个类别的5个指标特征值作为该类的聚类中心,则可用模糊聚类中心矩阵表示4个类别的指标特征值.
(5)
式中:Sih为类别h指标i的特征值的归一化数,0 ≤Sih≤1.
② 指标权重向量的计算.
在行驶工况特征参数选择时,选取平均速度、平均加速度、平均减速度、运行平均速度和怠速时间百分比5个特征参数,以燃油经济性作为评价指标应用正交优化方法分析5个参数的主次影响因素,然后采用极差分析法(R法或直观分析法)对正交试验结果进行处理分析以确定正交试验因素的主次、各试验因素的优水平以及试验范围内的最优组合,最终可以确定对行驶工况影响程度顺序依次为平均速度、怠速时间百分比、运行平均速度、平均减速度、平均加速度.在模糊识别中需考虑不同指标的权重,设它们权重以wi表示,则指标权向量为
[w1w2w3w4w5],
并且指标各个指标的权重应该满足
w1+w2+w3+w4+w5=1,
(6)
对每种指标权重需要进行设置,选取第4种工况作为标准工况,运用公式
分别计算另外3种工况与第4种工况的每一个指标的相似度.
依照上面的满足条件用C#语言编写迭代程序,每组进行3次试验计算出相似系数,最终可以确定指标权向量为
[0.44 0.34 0.10 0.09 0.03].
③ 模糊识别矩阵.
将5个样本根据m指标特征值,按照4个类别进行模糊识别,其模糊识别矩阵为
(7)
式中:uij为样本j归属于h类的相对隶属度,h=1~4.
由式(4)(5)及指标权重向量,可得
(8)
通过式(8)可计算出识别矩阵.
④ 工况类型的确定.
根据待识别矩阵应用类别特征值公式(9)得到所识别的样本归属的相对类别特征值H(x),由H(x)便可得到所识别的行驶工况归属的工况类别.
(9)
式中:μh(x)为样本x对类别h(h=1~4)的相对隶属度.
2 自适应控制策略
2.1 实时优化控制
2.1.1 发动机燃油消耗
根据发动机转速和发动机转矩两个控制参数由发动机MAP图插值即可求得发动机每一瞬时的燃油消耗,又因为对于给定的发动机转速nice、发动机转矩Tice,发动机的输出功率为
Pice(t)=nice(t)Tice(t),
因此发动机每一瞬时的燃油消耗率可表示为
(10)
发动机MAP图如图2所示.
2.1.2 电池电能等效燃油消耗
对于电量维持型混合动力汽车,在每一瞬时向电机提供转矩所消耗电池电量(不包括制动回收部分的电能)需要在车辆未来行驶过程中消耗一定量的燃油进行补偿,因此需要建立电池消耗电量与补偿这些电量所消耗燃油量的对应关系.在计算时引入等效因子feq_dis,feq_chg,此时电池电能的等效油耗可以表示为
(11)
式中:Pem(t)为电机的瞬时功率,Pem(t)>0表示电机处于放电状态,Pem(t)<0表示电机处于发电状态;feq_dis、feq_chg分别对应电池放电和充电时的等效因子;Qlbv为燃油低热值;ηchg(Pem)、ηdis(Pem)分别为电池的充电和放电效率,ηem(Pem)为电机的效率.
(12)
在对电池电量进行燃油转换计算时必需将制动系统回收的能量考虑在内,由于车辆在行驶过程中制动回收的能量不断变化,计算单位时间内的制动回收能量时取一定行驶循环内的平均制动回收能量进行计算,即
(13)
式中n为采样数据量.为了简化计算,取一定行驶循环的仿真结果进行初步估算.
由式(11)(13)可得电池电能的瞬时等效燃油消耗为
(14)
则总的瞬时燃油消耗可以表示为
(15)
(16)
2.1.3 求解瞬时输出功率
当车辆运行时,首先根据行驶工况每一瞬时的车速求得发动机转速及相应的整车需求功率,选取电机输出功率为控制变量,则由约束公式(16)可求得满足需求功率的所有发动机和电机工作点,并根据上述公式求得相应的燃油消耗率,通过优化计算求取使瞬时燃油消耗总量最小的发动机和电机工作点作为当前时刻满足行驶需求的功率输出,对混合动力客车进行控制.
2.2 电池电量平衡控制策略
基于最小等效燃油消耗的瞬时优化控制策略在对驱动功率进行分配时未考虑能否将电池SOC值维持在合理范围内,因此在控制时引入了电池电量维持策略.这里引入Paganell等[12]提出的惩罚函数的概念计算电池SOC值惩罚系数KSOC,根据当前行驶状态下电池电量使用情况对SOC进行修正.设电池SOC值的上限值、下限值分别为BSOC_hi、BSOC_lo,实时获取的电池电量状态为BSOC(t).本文采用的惩罚函数是由3次曲线和4次曲线函数拟合而成的S形函数,可以通过修改系数对曲线形状进行调整,从而将电池SOC维持在合理范围内,具体表达形式为
(17)
上述获得的电池SOC惩罚系数KSOC通过与电机瞬时等效燃油消耗等式相乘后取目标函数的最低值时发挥作用,因此电池SOC修正后,电机的等效燃油消耗最终可以表示为
(18)
2.3 自适应控制策略
选取不同的电池充放电等效因子feq_chg、feq_dis数值对验证参数变化对所构建的4种循环工况燃油经济性的影响,可以得到对应于4种循环工况最佳燃油经济性的4组电池等效因子feq_chg、feq_dis数据点,如表1所示,将离线优化所得4组控制参数存储于混合动力客车控制器中为车辆运行时在线识别工况及自适应控制调整控制参数做准备.
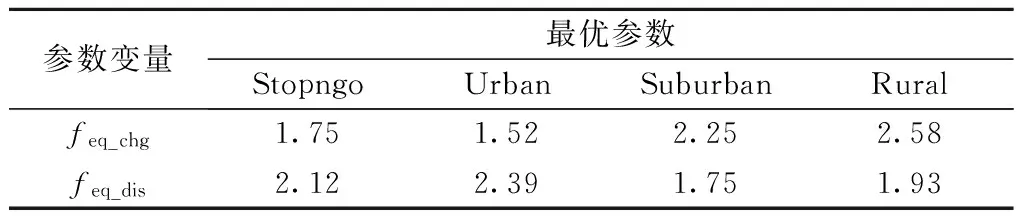
表1 标准工况控制参数优化结果
当车辆实际运行于某一时刻时首先根据车辆行驶特征参数由行驶工况在线模糊识别系统辨别出当前工况属于构建的4种典型工况中的哪一类,然后调用存储在控制器中相应工况的最优控制参数,以车辆运行瞬时总燃油消耗量最小为优化目标函数对发动机和电池的控制参数进行实时优化计算.当车辆运行于下一时刻时重复上述参数自适应调整过程,实现车辆运行中在线实时地根据行驶工况自适应调整控制参数,达到整车燃油经济性最佳的优化控制目标.
3 仿真实验分析
3.1 基于模糊算法的工况识别验证
基于离线构建的大连市循环工况对模糊识别理论工况识别方法进行验证,识别结果如图3所示.其中class 1表示市中心区工况;class 2表示市内较通畅区工况;class 3表示近郊区工况;class 4表示远郊区工况.由图3可以看出除了个别重合区域跳动比较大存在误差之外,该方法能够对行驶循环工况每一时刻所属工况类型进行准确识别,由此可以验证基于模糊识别理论的工况识别方法的可行性.4种典型工况所占比例的大小分别为:class 1情况为24%,class 2和class 3为4%和24%,Class 4为48%,符合大连地区实际行驶路况条件.
3.2 自适应控制仿真结果
针对基于模糊在线识别的自适应控制方法搭建仿真模型并将其导入Advisor仿真软件整车控制模型的控制策略模块,选用某并联式混合动力城市客车,以BSOC(t)=0.7为初始值进行燃油经济性仿真计算,控制过程中应用电池电量平衡控制策略与未应用此控制策略时的电池SOC变化对比曲线分别如图4中实线和虚线所示.
由此可知应用电池电量维持策略后整个行驶过程中,在仿真开始即混合动力客车起步时电池SOC基本呈下降趋势,整车控制系统趋于使用电机控制车辆起步,此后电池SOC一直维持在0.7附近上下波动,并且仿真结束时SOC值与起初的SOC基本相等,从而证明了前面所述电池电量维持策略的有效性;而未加入电池平衡策略时的电池电量却基本处于下降状态,行车过程趋于使用电池能量为车辆提供行驶动力,虽然在一定程度有利于节省燃油消耗,但却不利于维持整个过程中电池电量的稳定和提高电池寿命.
与此对应的整个循环工况过程中混合动力客车的发动机和电机的实时输出功率运行结果分别如图5、图6所示,总燃油消耗量变化轨迹曲线如图7所示.通过计算比较可得,基于模糊在线识别的自适应控制策略在大连市循环工况下的油耗仿真结果与混合动力客车实际油耗30 L/100 km相比,提高了21%.实验结果表明在满足车辆需求功率和电池SOC维持在有效工作区间内的前提下能够较好完成发动机和电机的最优功率分配,并能显著提高整车的燃油经济性.
为进一步验证基于模糊在线识别的自适应控制策略在节油潜力方面的有效性及可行性,以上述控制方法原理为基础针对大连工况、美国城市循环行驶工况UDDS、新欧洲NEDC行驶循环、以及日本10~15模式道路循环标准为车辆的目标行驶工况分别进行仿真实验,各行驶循环的百公里燃油消耗量对比结果如图8所示.
由图可以看出,与逻辑门限控制方法相比,本文所提出的自适应控制策略的燃油经济性在以上4种标准道路循环工况下燃油经济性分别改善了21.0%,16.7%,17.2%,17.0%;与实时优化控制策略相比百公里油耗在上述工况下分别降低了8.8%,7.0%,6.6%,10.1%.由此可以看出,基于模糊在线识别的自适应控制策略可以有效降低并联混合动力客车运行于各个行驶循环工况时的燃油消耗量,提高整车燃油经济性.
4 结 论
基于课题组自主研发的混合动力车数据采集监控系统对并联式混合动力客车控制策略进行了深入研究,提出了基于模糊在线识别的自适应控制策略.根据长时间采集的混合动力客车数据采用主成分分析技术和聚类技术构建了符合实际道路工况的4种典型行驶工况;设计了一种模糊识别方法对车辆运行工况进行在线识别;调用并实时更新与车辆当前行驶工况相对应的最优控制参数用于实时优化计算,进而得到发动机和电机控制参数.实验结果表明,文中所设计的模糊识别算法能够对行驶工况进行准确识别,以此为基础所制定的自适应控制策略优化方法能够在维持电池电量平衡的前提下显著提高工况适应性和燃油经济性等综合性能,具有广阔的应用前景.
[1] Hui S.Multi-objective optimization for hydraulic hybrid vehicle based on adaptive simulated annealing genetic algorithm[J].Engineering Applications of Artificial Intelligence,2010,23(1):27-33.
[2] 张昕,宋建峰,田毅,等.基于多目标遗传算法的混合动力电动汽车控制策略优化[J].机械工程学报,2009,45(2):36-40.
Zhang Xin,Song Jianfeng,Tian Yi,et al.Multi-objective optimization of hybrid electric vehicle control strategy with genetic algorithm[J].Chinese Journal of Mechanical Engineering,2009,45(2):36-40.(in Chinese)
[3] Sundström O,Ambühl D,Guzzella L.On implemen-tation of dynamic programming for optimal control problems with final state constraints[J].Oil &Gas Science and Technology-Revue de l’Institut Français du Pétrole,2010,65(1):91-102.
[4] Gökce K,Ozdemir A.An instantaneous optimization strategy based on efficiency maps for internal combustion engine/battery hybrid vehicles[J].Energy Conversion and Management,2014,81:255-269.
[5] Lian J,Han H,Li L,et al.Research on optimal control method of hybrid electric vehicles[J].Simulation,2013,89(9):1137-1146.
[6] Huang Y J,Yin C L,Zhang J W.Design of an energy management strategy for parallel hybrid electric vehicles using a logic threshold and instantaneous optimization method[J].International Journal of Automotive Technology,2009,10(4):513-521.
[7] Serrao L,Onori S,Rizzoni G.ECMS as a realization of Pontryagin’s minimum principle for HEV control[C]∥Proceedings of the 2009 Conference on American Control Conference.[S.l.]:IEEE,2009:3964-3969.
[8] Zhang Y,Lin W C,Chin Y K S.A pattern-recognition approach for driving skill characterization[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(4):905-916.
[9] Gurkaynak Y,Khaligh A,Emadi A.Neural adaptive control strategy for hybrid electric vehicles with parallel powertrain[C]∥Proceedings of Vehicle Power and Propulsion Conference (VPPC).[S.l.]:IEEE,2010:1-6.
[10] Lian J,Zhou Y,Ma T,et al.Research on data monitoring system of hybrid electric vehicle[J].Sensor Letters,2011,9(5):2012-2016.
[11] Zimmermann H J.Fuzzy set theory and its applications[M].Boston: Kluwer Academic Publishers,2011.
[12] Paganelli G,Ercole G,Brahma A,et al.General supervisory control policy for the energy optimization of charge-sustaining hybrid electric vehicles[J].J SAE Review,2001,22(4):511-518.
(责任编辑:孙竹凤)
Adaptive Control Strategy Based on Online Fuzzy Recognition for Parallel Hybrid Electric Vehicle
LIAN Jing,CHANG Jing,LI Lin-hui,ZHOU Ya-fu,LÜ Ren-zhi,HUANG Hai-yang,ZHENG Ning-an
(School of Automotive Engineering,Faculty of Vehicle Engineering and Mechanics,State Key Laboratory of Structural Analysis for Industrial Equipment,Dalian University of Technology,Dalian,Liaoning,116024,China)
An adaptive control strategy based on online fuzzy recognition was put forward for a parallel hybrid vehicle.A typical driving cycle in line with the local actual vehicle driving road conditions was constructed based on the independent research and development of the hybrid data acquisition and monitoring system.And then a fuzzy recognition algorithm was designed to carry on the on-line identification of the vehicle real driving cycle type, some corresponding optimal control parameters were taken for the real-time optimization calculation of the motor and battery power allocation based on the minimal equivalent fuel consumption control algorithm and the battery balance control method, combining with the results of condition recognition to realize the control of the whole vehicle finally.The experiment results show that the designed fuzzy recognition method can fulfill the recognition of the working condition type well, and the proposed adaptive control strategy based on this method can complete the optimal power allocation between the engine and the battery under the premise of meeting the demand of vehicle power and battery SOC maintaining within the effective working range, and can significantly improve the fuel economy of the vehicle.
parallel hybrid electric vehicle;driving cycle;fuzzy recognition;control strategy
2014-05-15
国家自然科学基金资助项目(51107006,61203171,61473057);博士后科学基金资助项目(2012M510799,2013T60278);中央高校基本科研业务费专项资金资助项目(DUT15LK13)
连静(1980—),女,副教授,E-mail:lianjing80@126.com.
李琳辉(1981—),男,副教授,E-mail:40301213@qq.com.
U 469.72
A
1001-0645(2016)03-0264-07
10.15918/j.tbit1001-0645.2016.03.009
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
能源工程(2022年2期)2022-05-23
网络安全与数据管理(2022年3期)2022-05-23
现代电力(2022年2期)2022-05-23
建材发展导向(2021年11期)2021-07-28
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
烟台大学学报(自然科学与工程版)(2020年1期)2020-02-08
课程教育研究·新教师教学(2016年18期)2017-04-12
电子技术与软件工程(2016年22期)2016-12-26
山东工业技术(2016年15期)2016-12-01