
平衡木屈体前空翻转体180°起跳动作的计算机仿真研究
2016-11-17 02:28吴成亮郝卫亚肖晓飞李旭鸿娄彦涛
成都体育学院学报 2016年5期
吴成亮,郝卫亚,肖晓飞,李旭鸿,娄彦涛
平衡木屈体前空翻转体180°起跳动作的计算机仿真研究
吴成亮1,2,郝卫亚2,肖晓飞2,李旭鸿3,娄彦涛2
目的:平衡木木上起跳是高难度分值空翻动作的关键技术,本文旨在揭示平衡木屈体前空翻转体180°(简称“F180”)起跳阶段运动技术及下肢动力学特征。方法:使用3台高速摄像机(300Hz)对世界冠军眭禄F180起跳动作进行拍摄及三维运动学分析,基于LifeMod建立19个环节个性化人体模型和平衡木模型,仿真F180的起跳动作。通过比较实际运动和仿真结果,验证所建模型的有效性。最后分析人体下肢发力特点及承受的内外负荷。结果:F180起跳阶段,运动员下肢髋、膝和踝关节反作用力依次增大,踝关节负载最大;下肢木上反作用力、关节反作用力和关节力矩均是右侧大于左侧;矢状面和额状面内关节力矩均为髋大于膝,踝最小;平衡木水平反作用力左右方向相反、大小接近。结论:平衡木F180,运动员为了保证起跳效果和稳定性,双脚必须同时起跳,且都应向正中矢状面发力,大小接近。髋关节力矩在F180起跳中起主要作用,右腿为主要发力腿。下肢关节力及力矩的有效协调配合,提供了F180起跳垂直动量及向左转体角动量。
平衡木;起跳;动力学;计算机仿真
0 引言
近年来,体操平衡木空翻类技巧动作发展迅速,其特点为腾空高度高,运动员有更多的时间和空间完成空翻类技巧动作,同时可提高动作的难度与连接价值[1]。木上起跳是该类动作的关键技术,它可将动能转化为势能,增加飞行高度。起跳获得的起跳速度和高度将成为完成空中高难度翻腾/转体技术的基础[11]。屈体前空翻转体180°(Salto forward piked with 1/2 twist,简称F180)是眭禄在第42届世界体操锦标赛中向国际体操联会成功申报的新动作(F组动作,0.6的难度分),是平衡木项目中最高难度动作之一,罕有运动员完成。从连接价值来讲,它连接技巧或体操动作,可获取0.20的连接加分。2006年国际体操联合会(FIG)启用新的评分规则,实行难度分(D分)上不封顶的新规则,运动员之间实力差距将会在D分得以更好的体现[1]。优秀体操运动员成套动作在构成D分的8个动作中,D、E和F组难度动作高达80%[2]。追求动作难度一直是平衡木发展的方向,而木上起跳技术已成为制约运动员发展空翻类技巧动作的瓶颈。
目前,国内外对于平衡木的研究较少,多集中在对平衡木单个动作的运动学分析。王静(2013)等对眭禄和张业琳子平衡木团身前空翻转体180°进行了运动学分析,该研究认为起跳要求获得尽可能大的腾空高度,助跑后两脚同时落木并同时起跳,两臂积极上摆,上体前倾[3]。竭晓安(2008)等在分析程菲平衡木团身后空翻转体360°站木后发现,起跳需要尽可能增加身体重心向上的垂直速度,且几乎是垂直起跳[4]。其它研究也表明空翻类动作起跳阶段蹬离角(离木瞬间身体重心与脚支点连线和水平线之间的前夹角)为83°-90°,接近垂直[2-4]。但很少有研究从动力学的角度对平衡木起跳进行分析,而力和力矩才是人体运动的真正原因。国外学者Mathiyakom等(2007)曾对体操运动员地面前空翻起跳进行了动力学分析,指出前空翻起跳垂直地面反作用力(GRF)峰值大约为3倍体重(Body Wight,BW),膝关节和髋关节在这个过程中起主要作用[12]。但这些研究分析都不是基于平衡木上的起跳,所以还不足以揭示平衡木上起跳的生物力学原理。人体运动的生物力学建模与仿真,现已广泛应用于阐明不同运动的动作原理、探讨运动损伤机制、提高运动成绩等诸多研究领域,并可获得运动过程中各关节力及力矩,还可通过计算机软件进行仿真实验[5]。
本文旨在揭示F180动作的起跳技术动力学特征,通过对高水平运动员的完成F180起跳动作的计算机仿真,量化运动员起跳阶段下肢发力特点及所承受的内外冲击负荷,为我国平衡木运动员空翻类动作起跳技术提供理论参考。
1 研究对象与方法
1.1 研究对象
本文研究对象为平衡木世界冠军、中国体操运动员眭禄,年龄22岁,身高1.52米,体重42公斤。采集动作为她完成的F180,动作组别F组,是目前平衡木项目中最高难度动作之一。
1.2 运动学参数的获取
使用3台高速摄像机(CASIO EX-F1),拍摄频率300Hz,快门速度1/320,对眭禄F180动作进行定点、定焦同步拍摄(国家体育总局训练局体操馆内)。其中A机正对平衡木,与其纵轴方向垂直,距平衡木约12 m;B、C机位于平衡木纵轴两侧,距平衡木约为21 m。3台摄像机距地面高度约为1.8m,主光轴对准动作范围的中心。A、B机夹角约70°,A、C机夹角约为110°。采用Peak框架进行三维标定,利用外同步对动作进行同步处理。使用运动分析系统SIMI Motion(德国,SIMI公司)进行三维运动解析(选取人体16个关节位置点)。所有解析工作,均由同一人完成,以减小人员判读误差。通过低通滤波(截断频率10Hz)对原始数据进行过滤,最终得到眭禄F180动作的三维运动学坐标。
1.3 动作建模与计算机仿真
根据多体动力学原理,利用人体运动仿真软件ADAMS/LifeMod(美国,BRG公司),选用人体模型数据库Gebod(Generator of Body Data),导入受试者性别、年龄、身高和体重等人体形态学参数,软件会根据这些参数及Gebod数据库用回归方法计算得到环节长度、围度等人体惯性参数,建立19个环节的人体刚体模型,并建立足部与地面接触的精细化椭球模型,人体模型共有50个自由度[6-8]。使用Python脚本语言的编写接口文件,结合人体解剖和生物力学特点,输入人体形态学和惯性参数,对运动学解析所获得人体运动三维坐标转换成LifeMod软件可识别的SLF数据文件,完成人体的运动建模。根据国际体联(FIG)平衡木器械的比赛要求和中华人民共和国体操器械的国家标准[9](GB/T8397-2007),建立平衡木的简化模型。
在完成人体模型建立之后,调整人体模型的初始姿态及位置,使之与实际的运动状态接近。然后进行平衡分析,使人体模型的关节中心和实际运动的人体关节坐标点相匹配。随后建立人体模型与平衡木的接触,进行逆向动力学分析,记录人体运动轨迹和各个关节力和力矩。最后进行正向动力学分析,在关节力和力矩的驱动下,完成平衡木F180起跳过程的仿真。
1.4 平衡木系统模型的可靠性验证
采用文献[10]方法,将F180起跳过程的仿真与三维运动学解析获得的关节角度变化曲线进行对比,以最小二乘法进行相似程度分析,来验证本研究中运动员-平衡木系统的可靠性。
2 研究结果
2.1 运动员-平衡木系统模型的验证
比较眭禄平衡木F180起跳中,仿真结果与实际运动接触时间、关节角度和垂直反作用力等参数,来验证运动员-平衡木系统模型的可靠性。首先,发现眭禄在实际F180动作起跳时间是0.12s,双脚几乎同时触木,且同时起跳离木。仿真的起跳时间也为0.12 s;其中左脚起跳总时间比右脚长0.01s。其次,仿真与实际的下肢关节角度变化也十分接近。例如,通过最小二乘法对比,发现矢状面内左、右髋关节角度在实际运动与仿真中两者的平均相对误差分别仅为0.02和0.01(图1)。对于起跳反作用力(Beam Reaction Force,BRF),本研究中左、右脚垂直BRF峰值分别为 1.96BW和2.23BW(Body Weight)。
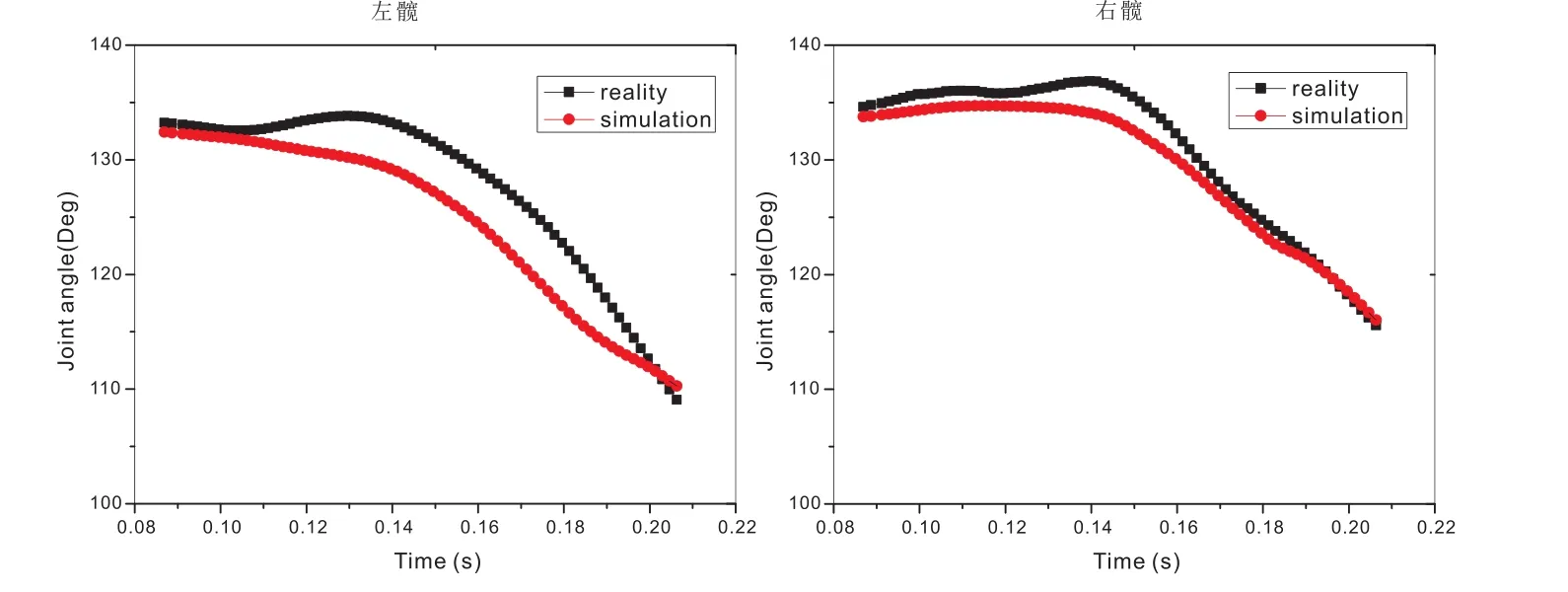
图1 仿真与实际起跳过程中髋关节角度变化曲线的对比Figure 1 Comparison betweensimulated and actual take-off angle of hip curve
2.2 起跳阶段下肢内、外负荷
眭禄平衡木F180起跳阶段,左、右脚在前后方向的BRF峰值分别为-1.45 BW和-1.71 BW(图2a),左右方向的分别为0.89 BW和-1.17 BW(图2b),垂直方向的分别为1.96BW 和2.23BW(图2c)。3个方向的BRF峰值均为右脚大于左脚,其中前后方向,右脚比左脚提前0.02 s达到BRF峰值。垂直方向,左、右脚几乎同时达到BRF峰值,都约为0.06s。
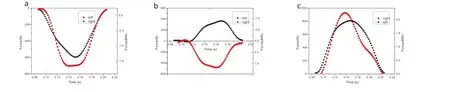
图2 起跳阶段双脚受到的平衡木前后(a)、左右(b)和垂直(c)方向的反作用力Figure 2 Reaction forces towardsthe feet from the sagittal(a),frontal(b)and vertical(c)direction of the beam during the take-off stage
在起跳阶段,髋、膝和踝关节反作用力(Joint Reaction Force,JRF)逐步增大,且幅度明显(图3)。右侧髋、膝和踝JRF峰值分别为0.97BW、1.55BW和2.00BW(图3b)。右踝将近0.05 s时达到JRF峰值,用时最短。左侧髋、膝和踝JRF峰值分别为0.66BW、1.39BW和1.74BW(图3a)。
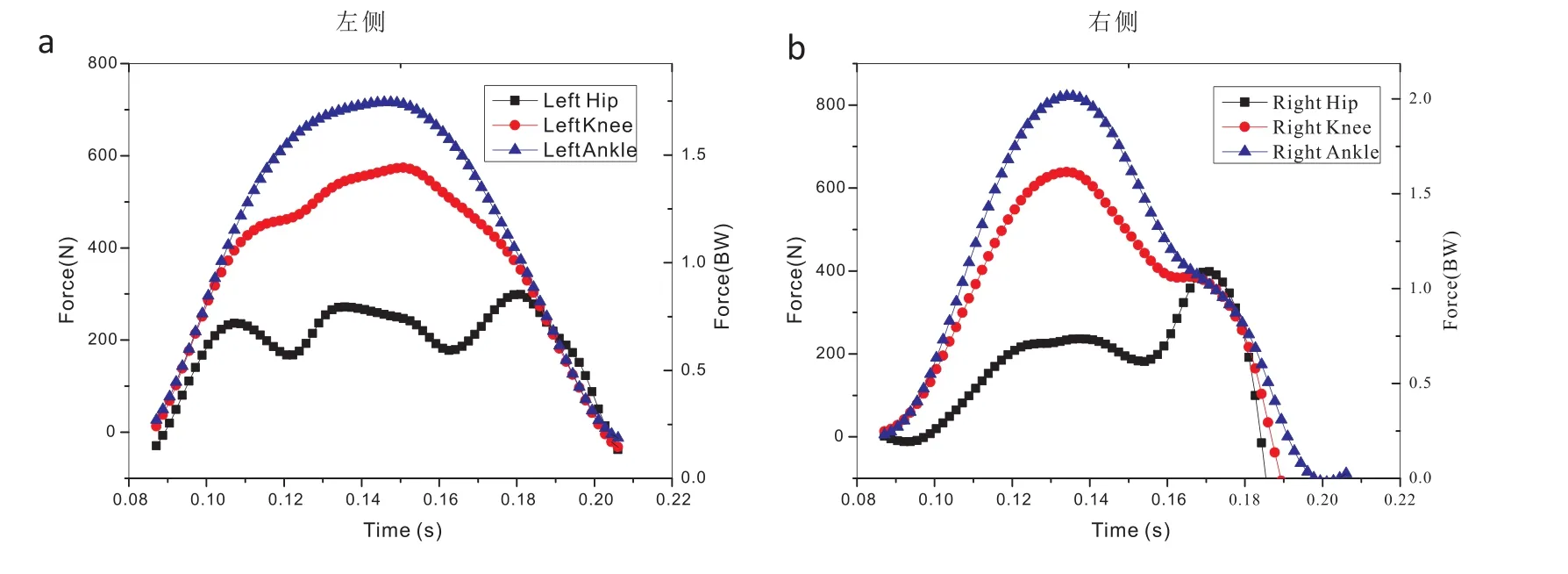
图3 平衡木起跳阶段下肢关节反作用力Figure 3 Reaction force from the lower limb joint during the taking off stage
在起跳过程中,在矢状面内,左腿髋关节开始有小幅度的伸肌力矩,随后转变为屈肌力矩,峰值为261.56 Nm。膝关节始终表现为屈肌力矩,峰值为181.81 Nm。踝关节跖屈力矩最小,峰值为67.21 Nm(图4a)。右腿髋、膝关节开始都表现屈肌力矩,峰值分别为328.24 Nm、181.14Nm,但随后髋、膝和踝关节力矩曲线在起跳0.06s时交汇于一点,然后几乎同时转化为伸肌力矩,峰值分别为267.80 Nm、213.34 Nm和74.42 Nm(图4b)。
在额状面内,左腿髋关节外展力矩最大,峰值为289.34 Nm。其次为膝关节外展肌,峰值为155.68 Nm,踝关节外翻力矩最小,峰值为31.29 Nm(图4c)。同样,右腿髋关节内收力矩最大,峰值为322.63Nm,其次为膝关节内收肌,峰值为170.13Nm,踝关节内翻力矩最小,峰值为51.80 Nm(图4d)。
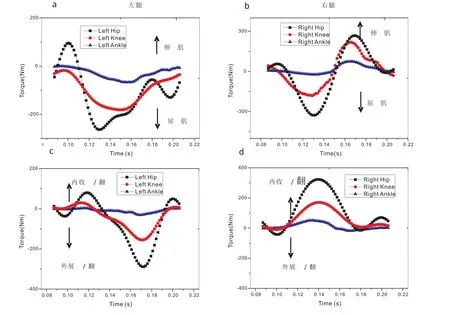
图4 下肢关节在矢状面(左腿a,右腿b)和额状面(左腿c,右腿d)内受到的关节力矩曲线图Figure 4 Curves of joint torqueson the sagittal Ppane(left leg a andright leg b)and the forntal plane(left leg c and right leg d)of the lower limbs
3 分析与讨论
本文研究对象为平衡木世界冠军,为避免受伤,加之平衡木只有10cm宽,很难实现在平衡木上放置压力垫(Pressure Mat),来测量运动员在起跳过程中所受到的垂直反作用力[13-14]。在平衡木立柱下方放置测力台(Force Platform),通过力的传递获取平衡木起跳过程人体-木之间的相互作用力[15]。本研究首次通过仿真后的运动参数(关节角度和动作时间)与实际运动相比较,同时结合垂直纵跳起跳阶段的反作用力[12,16](本文F180起跳与垂直纵跳起跳的动作结构相似),来验证本研究所建立的运动员-平衡木系统模型的可靠性。结果表明,本文建立的系统模型从动作时间、运动学和动力学相关参数上都与实际运动较接近。该结果表明,通过高速摄像方法所获取运动学参数,在此基础上所建立和驱动的人体模型来进行计算机仿真,能较真实地重现人体运动的实际情况。
平衡木F180动作,木上起跳是其关键技术。F180动作在起跳之前,在木上有两步助跑,第三步双脚(左脚靠前约半脚长)同时起跳,起跳角(身体重心和两脚尖中点与平衡木水平面的夹角)接近90°。所以,F180起跳动作可以近似认为是具有一定初速度的垂直起跳。F180起跳动作BRF具有如下特点:双脚同时起跳,前后方向BRF是右脚大于左脚,且提前达到峰值(图2a)。左右方向上,两脚BRF方向正好相反,且大小接近,有利于增加木上动作稳定性。这种用力策略对于木上动作具有重要意义,符合平衡木技术特点。从F180动作技术分析,起跳后身体将会有向左转体180度,而左右方向BRF右脚大于左脚,正好有助于向左的转体(图2b)。垂直方向的反作用力也是右脚大于左脚,双脚几乎同时达到峰值,共4.19 BW(图2c),这与Mathiyakom(2007)研究垂直纵跳起跳阶段的双脚垂直反作用力3.18 BW相比,两者结果大致处于同一范围内[12]。运动员在完成F180起跳动作时,髋、膝和踝JRF峰值增幅明显,髋的JRF峰值不到踝的1/3,说明胫腓骨、足弓,以及下肢软组织都能很好的耗散蹬伸下肢关节负荷[17]。右侧髋、膝和踝的 JRF峰值均大于左侧的,说明右腿为该动作的主要发力腿,这将有利于运动员起跳后向左的转体。其中右踝JRF峰值最大(2.00BW),时间最短(0.05 s)(图3)。因此,为了更好的完成F180起跳动作,运动员应该加强踝关节力量训练,尤其是右踝力量,这不仅可以为动作的顺利完成提供强大的力量保证,还将有助于降低踝关节蹬伸损伤概率。
F180起跳阶段的地面反作用力和下肢关节力矩,是起跳后身体翻腾/转体及重心上升的主要动力。因此,计算下肢关节力矩的意义在于提示哪些关节及肌肉(伸肌或屈肌)在起跳过程中起主导作用[7]。本研究发现,F180起跳过程中矢状面内,左腿髋、膝关节以屈肌力矩为主,说明股四头肌和小脚三头肌是起跳的主要发力肌。踝关节跖屈力矩较小,主动跖屈可增加起跳最后用力。右腿髋、膝关节开始主要表现屈肌力矩,在起跳0.06s后,同时转化为伸肌力矩,也几乎同时达到峰值,表明右脚在起跳阶段有从屈髋屈膝到伸髋伸膝的明显转化过程。踝关节伸肌力矩较小,起辅助作用,下肢关节发力配合一致。这种左右下肢关节肌肉协同用力特点,将同时有助于起跳后产生垂直动量和转体角动量。在额状面内,起跳前期,右腿髋、膝关节主要表现内收力矩。而起跳后期,左腿髋、膝关节主要表现外展力矩,髋关节力矩都较膝关节大,这种发力特点有助于起跳后产生向左转体角动量。在整个起跳过程中,踝关节力矩较小,左踝表现为外翻,右踝表现为内翻,这也有利于起跳后转体动作顺利完成。F180起跳后,运动员手臂在空中的不对称运动,也是实现空中转体180°的重要原因。Yeadon(1990)指出身体在空中的转体[18-19],主要是由于手臂或髋关节的不对称运动产生的,角动量产生于身体接触体操器械的阶段,目的是有利于起跳后进行转体。本文主要研究平衡木F180起跳,运动员平衡木反作用力和下肢关节力及力矩特征,最终较好的产生F180起跳的垂直动量和转体角动量,有利于起跳和起跳后身体向左的转体。
4 结论
本文利用三维影像运动学分析所获得的运动轨迹数据,基于LifeMod19环节的人体模型,对平衡木F180起跳动作进行建模与仿真研究,真实的再现了平衡木F180起跳动作技术特征。运动员为了保证平衡木F180起跳效果和稳定性,双脚必须同时起跳,且都应向正中矢状面发力,大小接近。下肢髋膝踝关节力及力距特点,都是为了产生起跳垂直动量及向左转体角动量。髋关节力矩在F180起跳中起主要作用,右腿为主要发力腿。踝关节在F180起跳中承受较高的负载,提示运动员练习该动作时,一定要先加强踝关节力量,尤其是右踝,这是增加起跳稳定和降低踝关节蹬伸损伤的保证。
[1] 国际体操联合会.女子竞技体操评分规则[A].2006.
[2] 孙捷.体操平衡木项目前空翻类动作的运动学指标分析[D].北京:北京体育大学,2012,6-9.
[3] 王静,毋江波.平衡木团身前空翻转体180度的运动学分析[J].福建体育科技.2013,32(03):26-28.
[4] 竭晓安,李翠玲,姚侠文.程菲平衡木团身后空翻转体360°站木运动学分析[J].北京体育大学学报.2008,31(09):1282 -1283.
[5] 郝卫亚.人体运动的生物力学建模与计算机仿真进展[J].医用生物力学,2011,46(02):97-104.
[6] 吴成亮,郝卫亚.跳马过程中人—器械动力学关系的研究[J].中国体育科技.2011,47(6):25-29.
[7] 李旭鸿,郝卫亚,于佳彬,等.基于LifeMod对跳马过程中体操运动员—落地垫动力学关系的计算机仿真[J].体育科学. 2013:33(03):81-87.
[8] 李旭鸿,郝卫亚,吴成亮,等.基于LifeMod对跳马运动员推手动作动力学的仿真研究[J].中国体育科技.2014,50(06):53 -58.
[9] GB/T8397-2007.中华人民共和国国家标准跳跃平台[S].2007.
[10] 王磊.基于最小二乘马尔科夫链模型的产品回收预测研究[D].石家庄:河北科技大学,2013,28-30.
[11] Spiros PS,Young HK,William AS.Biomechanical research in artistic gymnastics:a review[J].Sports Biomechanics,2014,5(2):261-291.
[12] Mathiyakom W,Mcnitt-Gray JL,Wilcox RR.Regulation of Angular Impulse during Two Forward Translating Tasks[J].Journal of Applied Biomechanics,2007,23(2):149-161.
[13] Bradshaw E,Hume P,Calton M,et al.Reliablity and variability of day-to-day vault training measures in artistic gymnastics[J],Sports Biomechanics.2010,9(2):79-97.
[14] Seeley MK,Bressel E.A comparison of upper-extremity reaction forces between the yurchenko vault and floor exercise[J].Journal of Sports Science&Medicine,2005,4(2):85-94.
[15] Fujinhara T,Gervais P.Circles with a suspended aid:reducing pommel reaction forces[J].Sports Biomechanics,2012,11(1):34-47.
[16] Koyama K,Tkato T,Yamauchi J.The effect of ankle taping on the ground reaction force in vertical jump performance[J].Journal of Strength and Conditioning Research,2014,28(5):1411 -1417.
[17] Markolf KL,Shapiro MS,Mandelbaum BR,et al.Wrist loading patterns during pommel horse exercises[J].Journal of Biomechanics,1990,23(10):1001-1011.
[18] Yeadon MR.The Simulation of Aerial Movement-I,II,III[J]. Journal of Biomechanics,1990,23(1):59-83.
[19] Yeadon MR,Atha J,Hales FD.The Simulation of Aerial Movement-IV[J].Journal of Biomechanics,1990,23(1):85-89.
A Computer Simulation Research on the Balance Beam Taking off Movement of Salto forward Piked with 1/2 Twist
WU Chengliang1,2,HAO Weiya2,XIAO Xiaofe2,LI Xuhong3,LOU Yantao2
Objective:Taking off skill for aerial movements is key to high-difficulty routines in gymnastics balance beam event.The purpose of the present studyis to investigate the kinetics characteristics of taking off skill of the movement of salto forward piked with 1/2 twist(F180)in balance beam event.Methods:First,a F180 performed by a world champion(SUI Lu)was analyzed through 3D motion analysis method.Then a model of 19 segments of human body and balance beam model were developed through LifeMod software,and the take-off movement of F180 was simulated.Themodel was evaluated by a comparison between the actual performance and simulation results.Finally,the simulated loads in lower limb were analyzed in connectionwith the taking off skill.Results:During take-off of F180,the peaks of joint reaction force(JRF)among leg hip,knee and ankle were increasedorderly.Balance beam reaction forces(BRF),JRFs and torques on the right side of the lower limbs were greater than those in the left.In the both sagittal and frontal plane,torques in hips were greater than that in knees,and thenin ankles.The horizontal BRFs on the two feet were in closed magnitudes and in the directions to the median sagittal plane.Conclusion:In order to increase the stability of movement,the gymnast should land feet on the beam simultaneously and contract the feet towards the median plane in much closed forces during F180 take-off stage.Hip plays a major role in take-off of F180,and the right lower limb produces a greater pushing force.The effective coordination of forces and torques in lower limbs provides vertical momentum and angular momentum for the taking off action of F180.
Balance Beam;Take-off;Kinetics;Computer Simulation
G804.6 Document code:A Article ID:1001-9154(2016)05-0101-06
G804.6
A
1001-9154(2016)05-0101-06
10.15942/j.jcsu.2016.05.017
(编辑 孙君志)
国家自然科学基金“运动专项空中动作控制的建模与仿真研究”(10972062);国家体育总局体育科学研究所基本科研业务费项目“人体运动动力学指标提取的方法与应用研究”(基本16-02)。
吴成亮,讲师,在读博士生,研究方向:运动生物力学理论与方法,E-mail:wclyy2004@163.com。通讯作者:郝卫亚。
1.重庆三峡学院,重庆404100;2.国家体育总局体育科学研究所,北京 100061;3.浙江体育科学研究所,浙江 杭州310004 1.Chongqing Three Gorges University,Chongqing 404100;2. China Institute of Sport Science,Beijing 100061;3.Zhejiang Institute of Sport Science,Hangzhou Zhejiang 310004
2016-06-04
2016-07-15
猜你喜欢
云南画报(2021年8期)2021-12-02
动漫界·幼教365(小班)(2021年6期)2021-07-21
阅读(科学探秘)(2020年11期)2020-12-28
科学导报(2020年74期)2020-12-21
快乐作文(3.4年级)(2020年4期)2020-05-25
文萃报·周五版(2019年31期)2019-09-10
青少年日记·小学生版(2017年7期)2018-03-07
课堂内外·教师版(2017年12期)2018-01-19
现代企业(2015年2期)2015-02-28
饮食科学(2014年1期)2014-02-23
