
基于输出电压动态调节的PMSM最大转矩无差拍控制
2016-11-08 04:45梁斌朱崇婧韩进辉张爱军李华杰
电气传动 2016年10期
梁斌,朱崇婧,韩进辉,张爱军,李华杰
(1.青海大学水利电力学院,青海 西宁,810016;2.青海省妇女儿童医院器械科,青海 西宁,810007)
基于输出电压动态调节的PMSM最大转矩无差拍控制
梁斌1,朱崇婧2,韩进辉1,张爱军1,李华杰1
(1.青海大学水利电力学院,青海 西宁,810016;2.青海省妇女儿童医院器械科,青海 西宁,810007)
针对传统高速永磁同步电机(PMSM)无差拍控制中高速段存在的转矩、磁链失控问题,提出一种PMSM电压限制下的无差拍转矩控制方法(voltage limited deadbeat torque control,VL-DBTC)。在建立分析PMSM无差拍调节器非线性转矩、磁链调节原理的基础上,阐明了高速段逆变器输出电压限制与PMSM转矩输出之间的本质关系。在此基础上,通过细分PMSM无差拍转矩跟踪项为最大转矩输出和精确转矩跟踪以满足全速段系统要求。最后,搭建了110 kW高速永磁同步电机对拖实验平台,验证了VL-DBTC方法在母线电压限制下的最大转矩输出性能的优越性。
永磁同步电机;无差拍控制;母线电压限制;最大转矩输出
永磁同步电动机(PMSM)以其体积小、重量轻、效率高、功率密度大、调速范围宽、维护简单等优点,逐渐成为电动汽车电机驱动系统的主流[1]。由于永磁同步电机转子使用永磁体,其激磁磁场不可调节,对其在有恒功率、宽调速范围运行要求的车载电机驱动系统中转矩、磁链控制提出了进一步的挑战[2]。目前,围绕PMSM高性能转矩、磁链控制的研究工作可以大致分为3个方向:1)直接转矩控制[3](direct torque control,DTC);2)磁场定向控制[4](field oriented control,FOC);3)无差拍转矩控制[5](deadbeat torque control,DBTC)。
其中,DBTC是一种离散控制技术,可在1个采样周期内使被控变量达到期望值,具有不受PI调节器带宽限制的快速动态响应特性,特别适合于离散控制系统。采用无差拍直接转矩控制技术,理论上可在1个采样周期内,使电机的输出转矩和定子磁链误差为零。但该控制律的实现一般要求解1个2次方程,实时计算量较大,且得到的电压矢量解通常不唯一[6];此外,PMSM高速段受逆变器输出电压的限制,当转矩和磁链变化较大时,系统并不能同时实现转矩和磁链的无差拍控制,此时系统的电压矢量解可有多个选择,这在一定程度上增加了系统实现的难度[7]。
针对传统高速永磁同步电机(PMSM)无差拍控制中高速段存在的转矩、磁链失控问题,本文提出一种PMSM电压限制下的无差拍转矩控制方法(voltage limited deadbeat torque control,VL-DBTC)。在建立分析PMSM无差拍调节器非线性转矩、磁链调节原理的基础上,阐明了高速段逆变器输出电压限制与PMSM转矩输出之间的本质关系。在此基础上,通过细分PMSM无差拍转矩跟踪项为最大转矩输出和精确转矩跟踪以满足全速段系统要求。最后,搭建了110 kW高速永磁同步电机对拖实验平台,验证了VL-DBTC方法在母线电压限制下的最大转矩输出性能的优越性。
1 永磁同步电机调速系统建模
图1为PMSM电压源逆变器调速系统结构图,在三相理想对称情况下,建立系统转矩、磁链变化率关系方程为

式中:Te为电磁转矩;p为电机极对数;Ψsα,Ψsβ为定子磁链αβ轴分量;iα,iβ为定子电流αβ轴分量;为定子磁链幅值。

图1 PMSM-VSI调速系统结构图Fig.1 The structure chart of PMSM-VSI speed control system
文献[8]指出,当数字处理系统的控制频率足够高时,可以认为其中各变量在1个控制周期内变化率保持不变,根据前向差分原理可将式(1)、式(2)中的微分项近似等效为

式中:Γ为系统变量;上标k,k+1分别为对应时刻的数字系统采样值。
将式(3)代入式(1)、式(2)后,即可求得离散时域k+1时刻的PMSM驱动系统的转矩、磁链预测值为
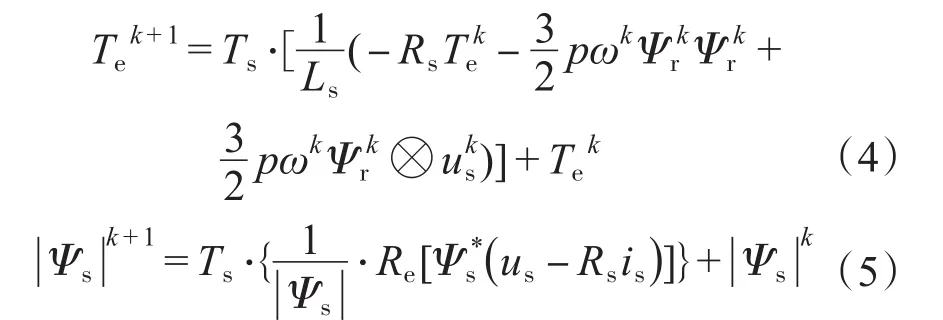
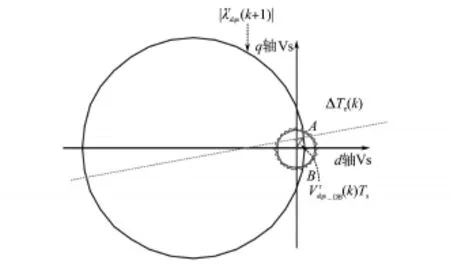
图2 60%基速下,转矩、磁链及其与逆变器电压矢量对应关系Fig.2 Torque and flux and its relationship with inverter voltage,atωr=0.6 ωb
图2为n=60%基速下,PMSM定子电压d-qVs坐标系下定子磁链、电磁转矩及其与逆变器输出电压矢量关系图。其中,虚线为恒转矩变化矢量线,即ΔTe=0;圆为恒磁链变化矢量线|Δλs|=0;旋转六边形为逆变器线性输出电压矢量范围,圆内为PWM线性调制区。可以看出,k+1时刻转矩、磁链无差拍跟踪曲线相交于图2中的A,B两点,即存在2组电压矢量满足转矩、磁链无差拍跟踪目标。进一步考虑逆变器输出电压矢量限制|us|<Umax,仅电压矢量B满足PMSM无差拍驱动系统设计要求。
2 转矩、磁链DBTC原理
由图2可知,在忽略逆变器电压输出限制的条件下,DBTC方法可以通过选择1个合适的电压矢量,使PMSM在下一个采样周期到来时,转矩和定子磁链幅值的误差为零。在上述图形分析的基础上,可采用如下的解析方法求取无差拍控制直接转矩控制的电压矢量解。根据无差拍控制的定义有

假设逆变器输出电压矢量幅值无限大,联合求解式(3)、式(4)可知,有且仅有1个电压空间矢量可在1个采样周期Ts内消除PMSM瞬时转矩误差ΔTe和定子磁链误差Δλs,即
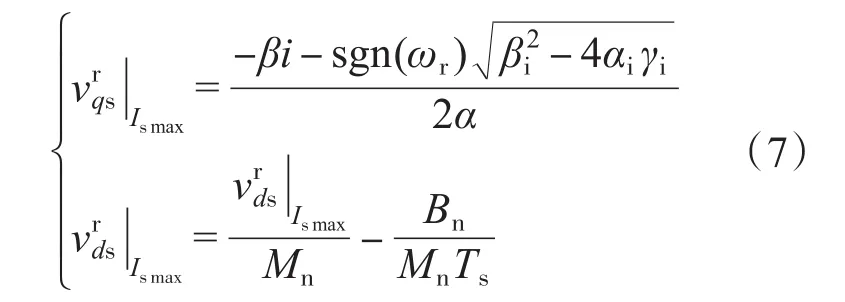
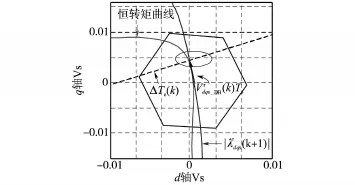
图3 PMSM稳态无差拍跟踪原理Fig.3 PMSM steady deadbeat principle
图3中给出了PMSM稳态无差拍跟踪原理示意图,其中稳态时在作用下,同时保证磁链跟踪误差和转矩跟踪误差为零,此外最大电流限制圆并未超出其最大取值。由此可见,当PMSM处于较低转速区间时其输出电压矢量裕度较大,可实现PMSM无差拍跟踪控制需求。
3 电压限制下DBTC最大转矩输出
当电机处于低转速n<80%基速时,由于此时PMSM对应反电动势较低,系统稳态时逆变器电压矢量U*始终远离SVPWM六边形电压矢量限制区域,即对应电压矢量可调值ΔU*较大。根据式(5)可知,此时PMSM调速系统可在单一控制周期内消除较大的转矩、磁链误差。然而,随着PMSM调速系统运行转速进一步增加至n>80%基速时,逆变器将无法输出足够的电压矢量偏差ΔU*,此时调速系统表现为对转矩、磁链误差项抑制效果降低。
图4所示为120%基速下,逆变器最大转矩输出性能分析图。其中,当k时刻PMSM调速系统出现较大的正向转矩需求ΔTe(k)时,对应的无差拍期望电压矢量U*交于点C,该矢量已超出逆变器最大输出电压范围。此外,PMSM驱动系统除了需要满足电压矢量限制外,还需满足最大电流Ismax椭圆限制。

利用圆|Δλdqs(k)|和直线ΔTe(k)的交点来确定电压解。供选择的电压矢量有2个,其一是常规电压矢量解乘1个收缩因子,使电压矢量解落在六边形的边界上;其二是直接采用最靠近常规解的基本电压矢量,显然这种基本电压矢量解可以输出更大的转矩,但产生的转矩脉动也更大,即


图4 120%基速下逆变器最大转矩输出性能分析Fig.4 Performance of inverter with maximum torque output,atωr=1.2 ωb
式中:αt为参数,αt=Lq-Ld;βt为参数,βt=(Ld-Lq)(B/Ts)-ωrLqλdqs;γt为参数,γt=ωrLqλdqsBn/ Ts-(4/3p)Mnω2rLdLq。
综上可知,VL-DBTC方法以直流母线电压利用率为判据,以实现PMSM最大转矩输出为目标,包含理想电压矢量求解,母线电压限制判断,电流幅值限制判断,电压矢量调整4个部分。
图5给出了VL-DBTC方法的控制流程图,首先根据转矩、磁链期望值Te*,λ*求解理想电压给定值v*dqs,并判断其是否满足直流母线电压限制。其中,若v*dqs超出母线电压限制值,则进一步根据电流Imag是否超出逆变系统限制Ismax结合式(7)、式(9)求解调整后的电压给定。

图5 VL-DBTC方法控制流程Fig.5 The control processes of VL-DBTC method
4 实验结果与分析
22 kW永磁同步电机对拖实验平台主要技术参数为:主电路,电机额定功率22 kW,电机额定电压380 V,极对数4,直流母线电压600 V;控制电路,中断频率10 kHz,载波周期2.5 kHz;TMS320F2812时种频率30 MHz。VL-DBTC动态轨迹优化结构如图6所示。为便于集中控制,各控制模块均配备独立控制器,控制系统采用3级控制架构,主控制器和辅助控制器集成在主控制板上,子模块控制器与主控制板采用光纤进行通信,从而保证了通信质量,避免了电磁干扰。
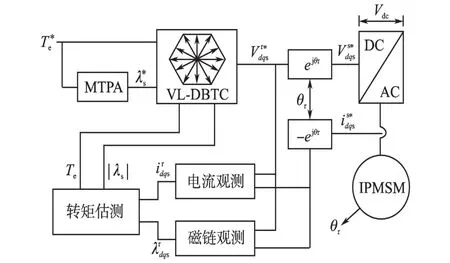
图6 VL-DBTC动态轨迹优化结构图Fig.6 VL-DBTC dynamic trajectory optimization structure
图7为VL-DBTC方法PMSM启动响应特性波形。图7a为转矩、磁链动态规划结果,其中电机转速n稳定在额定转速750 r/min,转速n以恒定加速度上升直至给定转速,在有负载扰动的情况下,转速几乎不受其影响,且加速和减速过程相似,均非常平滑,电机启动时间为1.6 s。结合转矩、磁链及电流波形可知,VL-DBTC方法可根据电机实际输出转矩进行磁链值修正,保证了最小电流幅值的前提下的最大转矩输出(MTPA)。图7b为VL-DBTC方法母线电压限制下的dq轴的电流动态规划结果。其中,在电机输出电压Va*达到饱和的情况下,PMSM转速超出其额定值750 r/min,d轴电流负向逐渐增大,电机转速n进一步增大,稳定值1 500 r/min,验证了VL-DBTC在输出电压饱和情况下的转速提升性能。

图7 VL-DBTC方法PMSM启动响应特性Fig.7 PMSM starting response characteristics with VL-DBTC method
图8为120 r/min加速动态过程电流矢量波形。其中,dq轴电流矢量沿MTPA最优轨迹运行至基速750 r/min后,为满足最大电流限制圆100 A的约束,q轴电流逐步由75 A降低至35 A,d轴电流负向逐渐增大。随后,PMSM转速n达到设计转折速度后,电机转矩逐渐下降,q轴电流由35 A不断减小至0 A,全过程中变频器输出电压矢量均趋于饱和。VL-DBTC方法在满足电压、电流限制的前提下,可有效实现永磁同步电机dq轴电流的合理修正,保证PMSM在全速域段最大转矩的有效输出。

图8 120 r/min加速动态过程电流矢量波形Fig.8 The dynamic process of current vector waves at 120 r/min
图9为VL-DBTC与传统DBTC转矩精度对比结果波形。其中,图9a为母线电压限制下转矩给定值由0 N·m阶跃至50 N·m动态过程。此时,传统DBTC转矩跟踪出现明显振荡,持续时间约为6 ms,且稳态跟踪精度较大,最大转矩跟踪误差达到80 N·m,反观VL-DBTC则仅需不足2 ms时间即可完成转矩快速响应,且整个动态过程中无超调现象。图9b为稳态精度对比结果,当PMSM转速超出其额定值(750 r/min)后,变频器输出电压达到饱和,此后VL-DBTC转矩跟踪精度较传统DBTC优势显著,且随着PMSM转速的不断上升,VL-DBTC在转矩跟踪误差精度方面的优势愈发凸显。

图9 VL-DBTC与传统DBTC转矩精度对比结果Fig.9 VL-DBTC in contrast to conventional DBTC torque accuracy results
5 结论
本文研究了电压限制条件下的PMSM无差拍转矩控制方法(voltage limited deadbeat torque control,VL-DBTC)。通过相关理论分析和22 kW样机实验验证可以得出以下几点结论:
1)无差拍控制器(DBTC)可在单一控制周期内实现PMSM非线性转矩、磁链的精确跟踪控制,保证了PMSM的稳态调节精度;
2)VL-DBTC克服了传统无差拍控制方法对于输出电压的限制要求,避免了PMSM高速阶段的转矩、磁链失控,有效拓宽DBTC方法的适用调速范围。
[1]郭仲奇,罗德荣,曾智波,等.一种新的内置式永磁同步电机弱磁控制方法[J].电力电子技术,2011,45(3):44-47.
[2]Hagiwara M,Akagi H.Control and Experiment of Pulsewidth-modulated Modular Multilevel Converters[J].Power Electronics,IEEE Transactions on,2009,24(7):1737-1746.
[3]Gautam D S,Musavi F,Eberle W,et al.A Zero-voltage Switching Full-bridge DC-DC Converter with Capacitive Output Filter for Plug-in Hybrid Electric Vehicle Battery Charging[J].Power Electronics,IEEE Transactions on,2013,28(12):5728-5735.
[4]Kim J M,Sul S K.Speed Control of Interior Permanent Magnet Synchronous Motor Drive for the Flux Weakening Operation[J].Industry Applications,IEEE Transactions on,1997,33(1):43-48.
[5]林斌,孙丹,贺益康.永磁同步电机直接转矩控制高速运行范围拓宽[J].电机与控制学报,2014,18(9):9-16.
[6]侯奕,刘卫国,葛乐飞.基于遗传算法的电动邮政车用永磁同步电动机滑模控制[J].微特电机,2013,41(8):47-50.
[7]沈辉,张希.电动汽车牵引电机新型控制系统的设计研究[J].电气传动,2015,45(3):3-6.
[8]苑伟华,潘峰,路瑶.基于滑模策略的直接转矩控制研究[J].电气传动,2015,45(8):9-13.
Permanent Magnet Synchronous Motor Maximum Torque Deadbeat Control Method Based on Dynamic Adjustment of Output Voltage
LIANG Bin1,ZHU Chongjing2,HAN Jinhui1,ZHANG Aijun1,LI Huajie1
(1.School of Water Resources and Electric Power,Qinghai University,Xining 810016,Qinghai,China;2.Department of Medical Instruments,Qinghai Women and Children Hospital,Xining 810007,Qinghai,China)
When the traditional deadbeat torque control(DBTC)is applied to the permanent magnet synchronous motor(PMSM),the torque and flux will run out of control range in the high speed.Presented a voltage limited deadbeat torque control(VL-DBTC)for PMSM to resolve this problem.First,analyzed the PMSM deadbeat controller-linear torque and flux adjustment principle.Then clarified the nature of relationship between inverter output voltage limit and PMSM output torque.0n this basis,segmented PMSM deadbeat torque maximum torque output trocking and precise torque tracking in order to meet the full system requirements.Finally,built 110 kW drag of high speed permanent magnet synchronous motor experiment platform,verified VL-DBTC in bus voltage limits the maximum torque output performance advantages.
permanent magnet synchronous motor;deadbeat control;direct current bus voltage limit;maximum torque output
TD631
A
10.19457/j.1001-2095.20161002
2015-08-26
修改稿日期:2016-03-29
国家自然科学项目,大规模风电集中并网系统区域间输电能力评估与决策研究(51377016);青海大学课程建设项目(KCFL—14—2—1);青海大学2015—2016学年教育教学研究项目资助(JY151618)
梁斌(1983-),男,硕士,讲师,Email:187101902@qq.com
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
山东电力高等专科学校学报(2019年5期)2019-11-01
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28
电测与仪表(2016年10期)2016-04-12
