地外天体着陆点选择综述与展望
2016-10-20 03:40葛丹桐崔平远
深空探测学报 2016年3期
葛丹桐,崔平远
(1. 深空自主导航与控制工信部重点实验室,北京 100081;2. 北京理工大学 深空探测技术研究所,北京 100081)
地外天体着陆点选择综述与展望
葛丹桐1,2,崔平远1,2
(1. 深空自主导航与控制工信部重点实验室,北京 100081;2. 北京理工大学深空探测技术研究所,北京 100081)
行星表面具有科学研究价值的区域往往地形复杂,对着陆的安全性提出了很高的要求。如何选择既满足工程约束又具有很好科学价值的着陆点,在提高任务可靠性的同时获得最优的科学回报,成为未来行星着陆任务需要解决的首要问题之一。回顾了以往地外天体着陆任务的着陆点分布情况,总结归纳了着陆点选取过程中需要考虑的因素,分析了当前的研究现状并给出一般选取流程,最后针对我国未来深空探测任务着陆点选择问题提出了一些思考与建议。
行星探测;着陆点选取;安全着陆
引用格式:葛丹桐,崔平远. 地外天体着陆点选择综述与展望[J]. 深空探测学报,2016,3(3):197-203.
Reference format: Ge D T, Cui P Y. Overview and prospect of planetary landing site selection [J]. Journal of Deep Space Exploration, 2016, 3(3):197-203.
0 引 言
深空探测为探索生命起源、宇宙演化提供了新的可能。半个世纪以来,人类已成功实现对月球、火星、小行星、彗星等太阳系天体的探测,涉及到的探测方式主要包括飞越、绕飞、着陆及巡视[1-3]。其中,着陆作为一种重要的探测方式,为人类了解地外天体的地质成分与空间环境提供了有效途径。从1959年前苏联发射的“月球2号”首次硬着陆在月球表面,到1969年“阿波罗11号”完成人类历史上首个载人登月任务,再到21世纪初,世界航天大国相继公布新一轮的探月计划,月球着陆技术日益成熟[4]。我国“嫦娥4号”将于2018年发射,首次实现人类探测器月球背面软着陆。与此同时,火星着陆任务也在同步进行,1971年前苏联的“火星3号”首次实现火星软着陆,但在着陆后不久便与地面站失去联系,1976年美国的“海盗1号”(Viking 1)是首个获得成功的火星着陆器,随后美国还相继发射了“火星探路者号”(Mars Path Finder,MPF)[5]、“勇气号”(Spirit)、“机遇号”(Opportunity)[6-7]、“凤凰号”(Phoenix)[8]与“好奇号”(Curiosity)[9]着陆器,以及“火星全球勘测者”(Mars Global Surveyor,MGS)、“火星侦查轨道器”(Mars Reconnaissance Orbiter,MRO)[10]和“火星大气与挥发演化”(Mars Atmosphere and Volatile Evolution,MAVEN)[11]探测器。2003年欧洲成功发射“火星快车”(Mars Express,MEX)空间探测器[12],该探测计划的环火轨道器部分运行正常,而一同携带的“猎兔犬2号”(Beagle 2)着陆器却在分离后失去联系,直到2015年人们通过MRO拍摄的图像再次在火星表面找到了它。此后,中国、俄罗斯、日本和印度也相继开展了火星探测计划。小行星探测方面,在经历了近距离飞越与低空绕轨勘探两个阶段后,现阶段主要目标为实现小行星软着陆与采样返回[13]。2003年日本发射的“隼鸟号”(Hayabusa)探测器在经历一系列故障后成功采集样本并返回地球[14]。除此之外,2004年欧空局发射了“罗塞塔”(Rossetta)探测器,其释放的着陆器“菲莱”(Philae)在数次弹跳后着陆在67P彗星表面[15]。
未来行星着陆任务要求探测器安全精确着陆在更为复杂的行星表面,这不仅对导航制导控制系统提出了极大的挑战,也对着陆区提出了更高的要求[16-17]。着陆点在选择时不仅需要考虑其科学探索价值,还要尽可能降低着陆风险。在任务规划阶段,需要根据已有的地形、光照、通信等情况对着陆区进行粗选取;当探测器接近目标天体后,可以获知更为精确的地形信息,此时需要对着陆点进行进一步的精选取[18]。尽管火星、月球及小行星的地表形貌特征存在显著差异,但在为探测任务确定着陆点时,其所涉及到的关键因素以及选取过程大致相同。本文回顾了以往行星着陆任务中着陆点的分布情况及考虑因素,对行星着陆点选择研究现状进行了总结,给出着陆点的一般选取流程并分析了其中涉及的关键技术,最后针对我国未来行星着陆任务中着陆点的选择提出几点思考。
1 以往任务着陆点分布
着陆点的选择是每个着陆任务都需要面对的重要难题,这个过程往往冗长且复杂,需要科学家和工程师经过长时间的多次探讨与筛选,最终得到适宜探测器着陆的最佳区域。截至目前,人类已成功实现一系列月球、火星及小行星着陆任务。以下将结合目标天体的特点,对以往任务着陆点的分布情况进行回顾。
1.1月球探测任务着陆点分布
如图1所示,在以往的月球着陆任务中,美国与前苏联多将着陆点选取在月球赤道附近的阴暗地区,而对高纬度地区的探测相对较少。月球表面的阴暗区多为月海,其地势宽阔平坦便于探测器着陆。由于自转周期与公转周期时长相同,月球总是以相同的一面朝向地球,考虑到对地的通信需求,目前所有的月球着陆任务均将着陆点选在了月球的正面。然而从已经获得的月球全球地形数据可以发现,月球的正面与背面具有显著差异:月球正面地形平坦,月海面积约占半球面积的一半;而背面月陆居多,其表面撞击坑密度更高,地形更崎岖,着陆的风险也相对更大[19-20]。我国预计于2018年发射的“嫦娥4号”将实现人类历史上首次月球背面软着陆,同时为了解决通信问题,将提前在地月L2点放置一颗中继卫星以实现对地对月中继通信。
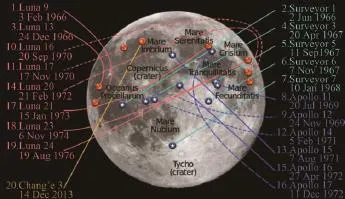
图1 月球着陆任务着陆区分布[21]Fig.1 Landing site dispersion in past lunar mission[21]
1.2火星探测任务着陆点分布
火星南北半球地形差异明显,南半球多为古老的布满陨石坑的高地,北半球则是更为年轻的平原。火星上布满了高低起伏的山脉与峡谷,以及大大小小的陨石坑、岩石与陡坡[22-23],复杂的地形地貌在提供了巨大科学探索价值的同时,也为着陆探测带来了挑战。为了提高任务的成功率,降低着陆风险,目前大多数着陆任务都将着陆点选取在地势相对平坦的北半球,如图2所示。同时,为了保证有足够的高度用来减速,所有的着陆点均位于海拔高度小于0 km的地区。着陆点的选择与现有技术水平息息相关,在过去的几十年里,随着安全着陆技术的发展与提高,着陆精度不断提升,着陆误差椭圆不断缩小,探测器能够到达的地方越来越多,随之带来的科学回报也越来越高。
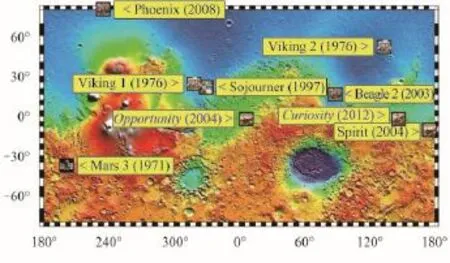
图2 火星着陆任务着陆区分布[24]Fig.2 Landing site dispersion in past Mars mission[24]
1.3小行星探测任务着陆点分布
不同于月球与火星探测,小行星由于其个体的特殊性以及探测重复率低等原因,在任务发射前无法准确获知其地形信息,因此对于这类任务,着陆点选择往往是在任务的执行过程中进行的,相对留给技术人员和科学团队的论证与决策时间也更少,相比于通常历时几年的火星着陆点选择而言,小行星着陆点的选择时间一般只有几个月到几周不等,为了能更好更快地选出合适的着陆点,地面人员需要在任务执行前期进行大量的准备工作,如商讨确定合适的着陆点需要哪些信息等[25]。以2004年欧空局发射的“罗塞塔号”(Rosetta)任务为例,在经过了10年飞行后,“罗塞塔”于2014年8月到达彗星67P附近。抵近过程中,地面人员充分利用“罗塞塔”携带的科学仪器(如OSIRIS、VIRTIS、MIRO、ROSINA、ALICE等)[26]对彗星上可能的着陆区进行了分析,并在着陆前大约80天时提出了5个备选着陆区,如图3所示,这些着陆区分布在67P彗星的两端,地形平坦且均具有良好的光照情况。随后地面人员针对这些着陆区进行了详细的轨迹分析、危险性评估以及科学价值排序,最终将Site J定为着陆器“菲莱”(Philae)的着陆点[27]。
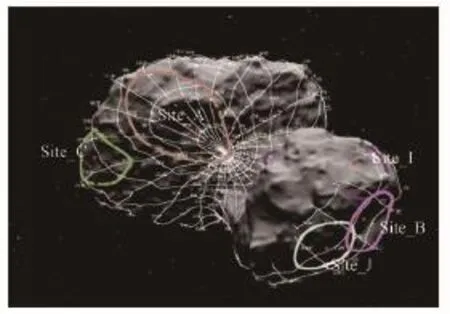
图3 “罗塞塔”任务的5个备选着陆区[27]Fig.3 5 candidate landing sites in Rosetta mission[27]
2 考虑因素
总的来说,着陆点的选择是安全性与科学价值的权衡结果[28],它不仅是在已有数据与当前技术约束下得到的最佳地点,同时还是科学团队一致认定的能获得最高科学回报的地区。总结归纳以往任务[5-6,29-30],在选取着陆点时所需考虑的因素可以分为工程约束及潜在科学价值两大类,以下将针对每类涉及到的因素进行详细说明。
2.1工程约束
工程约束通常指技术人员根据当前探测技术的限制对着陆区提出的要求,主要从行星表面环境及着陆安全性两方面考量,安全的着陆点一般具备以下特点:光照条件好,位于能够获得足够太阳能且通信效果较好的纬度,海拔高度较低以实现着陆器充分减速,在距离星面几千米高度范围内环境干扰较小,在高分辨率的地形图中无明显障碍物,低到中等岩石覆盖率,坡度较小,表面平坦、有较好的雷达反射率以及较高的热惯性,承重能力较好且尘土较少。
1)光照
在选择安全着陆点时,光照是非常重要的因素,它与光学敏感器的导航性能、障碍检测结果以及表面操作能源供给等多方面密不可分,长时间的光照为更丰富的科学活动提供了可能。然而在挑选着陆点时,光照时间并不是越长越好。那些总是有光照的地方将无法观察到日夜循环现象,同时持续的光照将导致星体表面及科学仪器温度升高,从而损坏有效载荷,影响分析检测效果[27]。
2)纬度
高纬度地区无法获得充足的光照,进而影响到探测车的能源供给。同时,较低的温度也对热控系统提出了更高的要求,在低温环境下探测车需要消耗更多的能量产热以维持整个系统的热平衡,严重时甚至可能影响有效载荷的正常工作[6,31]。因此,系统对能量和温度的需求情况直接影响了着陆点纬度的选取范围。如图4所示,在为火星科学实验室(MSL)任务选取着陆点时,白色标出的区域由于纬度过高直接从考虑范围内被剔除。
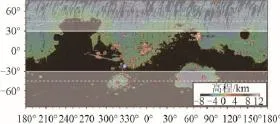
图4 MSL着陆点选取过程中,白色与黑色部分由于纬度过高及高程高度不合适首先被剔除掉[9]Fig.4 In the MSL landing site selection process,the white and black part is eliminated first due to improper latitude and elevation[9]
3)高程
着陆点的高程决定了探测器减速的有效高度。对于下降速度较小或能够快速实现减速的任务来说,着陆点高程并无特殊要求;而对于像火星着陆这类下降速度大、减速方式与能力有限的任务,则需要更长的距离来降低着陆速度,实现着陆器平稳安全着陆[31]。考虑到MSL着陆器的减速性能,技术人员在最初选择着陆点时便根据高程划定出选取范围,图4中黑色区域由于高程过高而不纳入讨论范畴。
4)环境干扰
在下降过程中如果遇上如突风等较强的环境干扰,可能会导致探测器运动轨迹偏离标称值且在水平或竖直方向具有一定的速度[32]。由于干扰大小无法提前预知,这对探测器的安全着陆构成了极大的威胁。同时,行星表面的持续强风还会影响探测车的正常运作,影响恒温系统,甚至导致探测车侧翻。因此在选择着陆点时,要求着陆区上空范围环境干扰要尽可能小,同时在设计着陆系统时,还应提高制导控制模块对环境干扰的鲁棒性,减小未知因素对探测器运动的影响。
5)表面环境
探测器受环境干扰、导航误差等影响,最终将着陆在预定着陆点附近的着陆误差椭圆内,因此在选择着陆点时,还需要根据估计的着陆误差椭圆大小考察着陆点附近一定范围内的区域是否满足工程约束,主要包括岩石尺寸、坡度大小、表面粗糙度、雷达反射率、表面承重能力等[33-35],对表面环境的具体约束取决于着陆方式、着陆器的结构尺寸,以及对障碍物的容忍能力,这不仅关乎着陆的成败,还对随后探测车的移动范围以及能否顺利开展预定的科学实验任务至关重要。表1列举了近年来成功着陆在火星表面探测器采用的着陆方式以及对着陆条件与环境的要求。
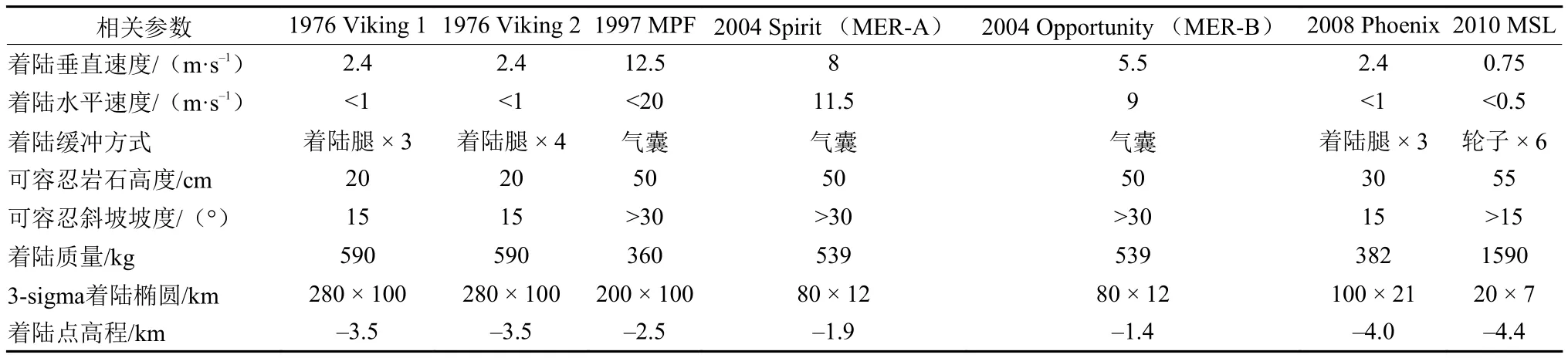
表1 以往火星着陆任务着陆情况[16]Table 1 Landing conditions of past Mars landing missions[16]
2.2科学价值
着陆区的科学价值通常通过对任务科学目标的实现程度来衡量。随着行星探测次数的增加,探测目标也从最初的了解空间与表面环境,获取行星地形、地貌、地质图,实现软着陆、采样返回等任务,不断深入并演变成探索天体内部结构、演化与成因,论证宇宙及生命起源假说,合理开发利用太空资源,为人类社会长期可持续发展寻找可靠支撑等等[36]。
一般来说,评估着陆区科学价值的标准有以下几点[6,9,13]:1)提供科学探索的多样性,在着陆区内有尽可能多的形态学及矿物学科学探测目标,并且能够与之前探测任务获得的成果区分开;2)能够获得确知的地质结构及岩石产生的年代,且环境条件能够确保探测车完成预定的科学任务;3)通过采样分析岩石和土壤能够获知环境气候的演化过程,提供水存在的证据,验证已有地质成因等假说;4)环境适宜于保留化石或其他保存生命特征的物质,能够研究早期留存下来的有机物或微观结构的演变过程等。
科学团队在选择着陆区时,将根据提出的若干标准对备选着陆区进行评估,能够同时实现多重科学价值的区域往往更受青睐。科学家将备选区按照其探索价值大小排序,一般来说,排序靠前的备选区当选为最终着陆区的可能性更大。
3 研究现状
在月球、火星着陆任务中,由于目标天体的地形信息能够通过轨道器以及以往任务观测数据获得,因此着陆点的选取工作一般在任务前期筹备阶段进行;而在小行星着陆任务中,由于无法提前获取准确的地形信息,着陆点的选取工作则一般在任务执行过程中进行。图5给出了着陆点选择的流程图,根据已有月球、火星及小行星探测任务的选址经验[9,27,30,37-38],一般着陆点选取过程可以概括为:
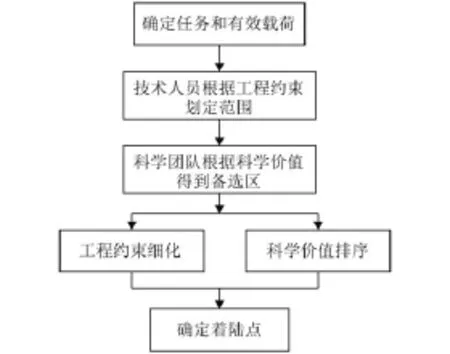
图5 着陆点选取流程Fig.5 Landing site selection process
首先,技术人员根据任务需要给出着陆区的工程参数要求,如纬度范围、海拔高度、表面温度、粗糙度、岩石覆盖率、坡度等等,这些约束能够提高着陆任务的安全性并确保探测车在目标天体表面的顺利移动,是开展科学探测的首要保障。
在此基础上,科学团队根据此次提出的科学目标以及探测器携带的有效载荷,结合已有地形信息,提出一系列满足要求的着陆区,并根据其科学价值进行排序,这一排序结果决定了随后利用轨道器获取高分辨率地形图像的先后次序,这些三维地形数据为科学团队进一步评估着陆区科学回报提供更为详尽信息的同时,也为技术人员寻找安全着陆点提供了可靠的依据。
在随后的讨论中,除了不断筛选着陆点,还会有新的着陆点被提出并一起纳入考虑。随着选取工作的深入,工程约束会进行相应的调整与细化,备选着陆区带来的科学回报也会越来越明确,通过反复对备选区满足工程约束情况以及科学探索价值进行论证,一般来说,会有大约4~6个备选着陆点进入到最后的选择阶段,将这些备选点按照科学价值大小进行排序,最终在现有技术下能够实现安全着陆并且获得最大科学回报的着陆点将当选为任务的目标着陆点。
着陆点在选择时需要结合前后任务的完成情况。对于同一个探测目标天体来说,每次着陆任务选取的着陆点均是密切相关的。一次任务的着陆点选取往往影响到对之后任务可能着陆区的观测。例如月球上笛卡尔地区由于具有极高的探测价值被作为“阿波罗”系列任务优先考虑的探测目标,但难以根据已有资料确定其是否能够实现安全着陆,因此“阿波罗14号”在下降过程中对该地区进行了详细的观测,最终该地成为了“阿波罗16号”任务的着陆点[39-40]。此外,在为某一次任务选取着陆点的过程中会产生一系列备选着陆点,落选的着陆点可能成为后续任务的首选着陆点重新纳入考虑。出于对技术验证或科学价值最大化的考虑,已完成的着陆任务对正在进行任务的着陆点选择也会造成影响。在成功实现目标天体软着陆后,后续任务就需要着力于提高着陆精度,探索更复杂更有科学价值的区域。
多年来,着陆探测技术的不断发展为着陆点的选择提供了更多的可能。早期探测任务受行星表面测量技术的限制,能够提前获取的目标天体图像分辨率较低,无法准确识别出较小尺度的地形障碍,对着陆区的科学价值评估也相对有限,因此要求着陆区平坦宽阔,且采用相对较为安全的着陆方式如气囊以提高着陆任务在未知环境中的成功率。随着技术的发展,搭载在轨道器上的相机分辨率不断提升,2005年美国发射的火星侦查轨道器携带的HiRISE相机分辨率高达31cm/pix[10],结合障碍识别算法及相关软件[41-42],能够精确识别出火星表面对探测器构成威胁的岩石、斜坡、陨石坑等障碍物,对着陆区带来的科学回报也更为明确,成为了地面进行任务规划时不可或缺的重要参考依据。与此同时,自主导航制导与控制[43-44]、轨迹优化与跟踪[45-46]等精确着陆技术的进步使得着陆误差椭圆不断缩小,任务对地形的要求也相对降低,因此着陆点可以设在更为复杂险峻有更多科学探索价值的地区。此外,着陆点的选择还受到科学载荷的约束。欧空局计划于2018年向月球发射一个着陆器,并将着陆点选在南极点附近,该地区最显著的优点在于其具有长时间的光照以及良好的对地通信情况,并且附近黑暗的陨石坑具有科学探索价值。由于放射性同位素技术在欧洲航天领域尚未发展完全,无法在发射日期前制作出能够用于月球探测的放射性同位素加热装置及热电发电机,着陆器只能依靠自身存储的电能度过寒冷的黑夜,因此在为该任务选取着陆点时,光照条件便成了首先需要考虑的因素之一[37]。
4 未来展望
目前我国已成功发射“嫦娥1号”“嫦娥2号”轨道器,“嫦娥3号”也已顺利软着陆在月球表面,“嫦娥4号”预计于2018年发射,届时将实现人类探测器首次着陆在月球背面,同时“嫦娥5号”也正在紧张的研制当中,预计于2017年前后在海南发射,实现月球取样并返回地球。“嫦娥”系列月球探测工程的顺利实施为我国未来深空探测打下了良好的基础,然而以现有的技术要实现月球以外的天体探测是远远不够的。未来地外天体着陆任务对地形测绘、着陆区选择、精确着陆等方面均提出了很高的要求,以下针对我国深空探测任务着陆点选取提出几点建议:1)我国需要依靠自主技术获取目标天体的高分辨率地形数据,为此需要提高轨道器定轨定姿精度、在轨观测能力、光学传感器工艺水平以及地形测绘技术;2)针对未来可能的着陆任务形成一套完整的着陆点评估方案与选择体系,这其中包括工程约束的完善以及科学价值的评估,组建相互独立又紧密联系的技术团队与科学团队,结合我国现有探测技术准确快速给出可行的探测范围与科学目标;3)不断发展地外天体精确着陆技术,缩小着陆椭圆,为着陆区的选取提供更多的可能性,同时提高探测器安全着陆能力,以探索具有更高科学价值的区域;4)积极开展国际合作,学习借鉴欧美等航天大国的丰富选址经验以及先进的量测与着陆技术,为我国深空探测事业提供参考依据。
5 结束语
地外天体探测为人类了解生命起源及宇宙演化等提供了更为直观的方式与途径,为了更好实现深空探测任务的科学目标,未来着陆任务要求探测器在保障安全着陆的前提下,降落在具有很高科学回报的地区,故而着陆点的选取成为整个任务中最关键的一环。本文分别给出了以往月球、火星及小行星着陆任务的着陆点分布情况,分析了决定着陆点选取的两大关键因素——工程约束及科学价值,给出当前的研究现状,归纳得出着陆点的一般选取流程及与着陆点选择相关的技术,最后针对我国未来深空探测任务的着陆点选取进行了展望并给出了几点建议。
[1]崔平远,高艾,于正湜. 火星着陆自主导航方案研究进展[J]. 深空探测学报,2014,1(1):18-27. Cui P Y,Gao A,Yu Z S. Research progress of autonomous navigation scheme for Mars landing [J]. Journal of Deep Space Exploration,2014,1(1):18-27.
[2]吴伟仁,于登云.“嫦娥3号”月球软着陆工程中的关键技术[J]. 深空探测学报,2014,1(2):105-109. Wu W R,Yu D Y. Key technologies in the Chang'e-3 soft-landing project[J]. Journal of Deep Space Exploration,2014,1(2):105-109.
[3]袁旭,朱圣英,乔栋,等. 小天体着陆动力学参数不确定性影响分析[J]. 深空探测学报,2014,1(2):134-139. Yuan X,Zhu S Y,Qiao D,et al. Impact analysis of dynamic parameters uncertainty on small celestial body landing[J]. Journal of Deep Space Exploration,2014,1(2):134-139.
[4]欧阳自远. 月球探测的进展与中国的月球探测[J]. 地质科技情报,2004,23(4):1-5. Ouyang Z Y. International lunar exploration progress and Chinese lunar exploration[J]. Geological Science and Technology Information,2004,23(4):1-5.
[5]Golombek M P,Anderson R C,Barnes J R,et al. Overview of the Mars pathfinder mission:launch through landing,surface operations,data sets,and science results[J]. Journal of Geophysical Research Atmospheres,1999,104(E4):8523-8553.
[6]Grant J A,Golombek M P,Parker T J,et al. Selecting landing sites for the 2003 Mars Exploration Rovers[J]. Planetary & Space Science,2004,52(1-3):11-21.
[7]Golombek M P,Arvidson R E,Bell J F,et al. Assessment of Mars Exploration Rover landing site predictions[J]. Nature,2005,436(7047):44-48.
[8]Spencer D A,Adams D S,Bonfiglio E,et al. Phoenix landing site hazard assessment and selection[J]. Journal of Spacecraft & Rockets,2009,46(46):1196-1201.
[9]Grant J A,Golombek M P,Grotzinger J P,et al. The science process for selecting the landing site for the 2011 Mars Science Laboratory[J]. Planetary & Space Science,2011,59(11):1114-1127.
[10]Kirk R L,Howington-Kraus E,Rosiek M R,et al. Ultrahigh resolution topographic mapping of Mars with MRO HiRISE stereo images:meter-scale slopes of candidate Phoenix landing sites[J]. Journal of Geophysical Research Atmospheres,2008,113(3):5578-5579.
[11]Luhmann J G,Dong C,Ma Y,et al. Implications of MAVEN Mars near-wake measurements and models[J]. Geophysical Research Letters,2015,42(21):9087-9094.
[12]Nielsen E. Mars express and MARSIS[J]. Space Science Reviews,2004,18(111):245-262.
[13]Ulamec S,Biele J. Surface elements and landing strategies for small bodies missions-Philae and beyond[J]. Advances in Space Research,2009,44(7):847-858.
[14]Kawaguchi J,Fujiwara A,Uesugi T. Hayabusa—its technology and science accomplishment summary and Hayabusa-2[J]. Acta Astronautica,2008,62(62):639-647.
[15]Hand E. Philae probe makes bumpy touchdown on a comet[J]. Science,2014,346(6212):900-901.
[16]Braun R D,Manning R M. Mars exploration entry,descent,and landing challenges[J]. Journal of Spacecraft and Rockets,2007,44(2),310-322.
[17]Quadrelli M B,Wood L J,Riedel J E,et al. Guidance navigation and control technology assessment for future planetary science missions[J]. Journal of Guidance Control & Dynamics,2013,38(7):1165-1186.
[18]王大轶,李骥,黄翔宇,等. 月球软着陆过程高精度自主导航避障方法[J]. 深空探测学报,2014,1(1):44-51. Wang D Y,Li Y,Huang X Y,et al. A Pinpoint autonomous for navigation and hazard avoidance method lunar soft landing[J]. Journal of Deep Space Exploration,2014,1(1):44-51.
[19]Lucey P G. Understanding the lunar surface and space-Moon interactions[J]. Reviews in Mineralogy & Geochemistry,2006,60(1):83-219.
[20]Hiesinger H,Head J W. New views of lunar geoscience:an introduction and overview[J]. Reviews in Mineralogy & Geochemistry,2006,60(1):1-81.
[21]Wikipedia.Moon landing [G/OL].[2016-05-31]. https://en.wikipedia. org/wiki/File:Moon_landing_sites.svg.
[22]Bernard D E,Golombek M P. Crater and rock hazard modeling for Mars landing [C]//AIAA Space 2001 Conference and Exposition.[S. l.]:AIAA,2001.
[23]Golombek M P,Haldemann A F C,Forsberg-Taylor N K,et al. Rock size-frequency distributions on Mars and implications for Mars Exploration Rover landing safety and operations[J]. Journal of Geophysical Research Planets,2003,108(E12):237-237.
[24]Wikipedia. Mars landing[G/OL].[2016-05-31]. https://en.wikipedia. org/wiki/Mars_landing.
[25]Accomazzo A. Rosetta mission operations for landing [J/OL]. [2016-05-31]. http://dx.doi.org/10.1016/j.actaastro.2016.01.013i.
[26]Ulamec S,Biele J,Jurado E,et al. Landing preparations for the Rosetta comet Lander Philae [C]//International Astronautical Congress. 2013.
[27]Ulamec S,Biele J,Blazquez A,et al. Rosetta lander-Philae:landing preparations[J]. Acta Astronautica,2015,107(2014):79-86.
[28]Steinfeldt B A,Grant M J,Matz D A,et al. Guidance,navigation,and control system performance trades for Mars pinpoint landing[J]. Journal of Spacecraft & Rockets,2010,47(1):188-198.
[29]Golombek M,Grant J,Lorenzoni L,et al. Preliminary constraints and plans for Mars Science Laboratory landing site selection [C]//37th Annual Lunar and Planetary Science Conference,2006.
[30]Golombek M. Mars Pathfinder landing site selection process[C]// Lunar and Planetary Science Conference. [S. l.]:LPSC,1996.
[31]Howard A,Seraji H. A fuzzy rule-based safety index for landing site risk assessment[C]//Automation Congress,2002 Proceedings of the 5th Biannual World. [S. l.]:IEEE,2002:579-584.
[32]Wolf A A,Acikmese B,Cheng Y,et al. Toward improved landing precision on Mars [C]//IEEE Aerospace Conference. [S. l.]:IEEE,2011:1-8.
[33]Golombek M P,Cook R A,Economou T,et al. Overview of theMars Pathfinder mission and assessment of landing site predictions [J]. Science,1997,278(5344):1743-1748.
[34]吴伟仁,王大轶,毛晓艳,等. 基于月面单幅图像的软着陆障碍识别与安全区选取方法[J]. 深空探测学报,2014,1(4):262-268. Wu W R,Wang D Y,Mao X Y,et al. Obstacle recognition and safe area selection method in soft landing based on a single lunar image[J]. Journal of Deep Space Exploration,2014,1(4):262-268.
[35]魏若岩,阮晓钢,庞涛,等. 小天体软着陆中的地面特征区域提取与跟踪算法[J]. 深空探测学报,2014,1(4):308-314. Wei R Y,Ruan X G,Pang T,et al.Characteristic areas extraction and tracking algonthm in the process of asteroid landing[J]. Journal of Deep Space Exploration,2014,1(4):308-314.
[36]欧阳自远.我国月球探测的总体科学目标与发展战略[J]. 地球科学进展,2004,19(3):351-358. Ouyang Z Y. Scientific objectives of Chinese lunar exploration project and development strategy [J]. Advance in Earth Sciences,2004,19(3):351-358.
[37]Fisackerly R,Pradier A,Gardini B,et al. The ESA Lunar lander mission [C]//AIAA SPACE 2011 Conference & Exposition. [S. l.]:AIAA,2011.
[38]Sasser J H. Apollo lunar landing site selection process[J].Journal of the Surveying & Mapping Division,1967,93(2):55-74.
[39]Swann G A. Geology of the Apollo 14 landing site in the Fra Mauro highlands[R]. Washington U. S. govt. print. off,1977.
[40]Hinners N W. Apollo 16 site selection[Z]. Nasa Special Publication,1972,315.
[41]Schmidt R,Bostelmann J,Cornet Y,et al. Land safe:landing site risk analysis software framework[J]. International Archives of the Photogrammetry Remote Sensing & Spatial Information Sciences,2012,XXXIX-B4(B4):505-510.
[42]Huertas A,Johnson A E,Werner R A,et al. Performance evaluation of hazard detection and avoidance algorithms for safe lunar landings[C].//IEEE Aerospace Conference. [S. l.]:IEEE,2010.
[43]Prakash R,Burkhart P D,Chen A,et al. Mars Science Laboratory entry,descent,and landing system overview [C]//IEEE Aerospace Conference.[S. l.]:IEEE,2008.
[44]Furfaro R,Cersosimo D,Wibben D R. Asteroid precision landing via multiple sliding surfaces guidance techniques [J]. Journal of Guidance Control & Dynamics,2013,36(4):1075-1092.
[45]Acikmese B,Scharf D,Blackmore L,et al. Enhancements on the convex programming based powered descent guidance algorithm for Mars landing [C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit. [S. L.]:AIAA,2008.
[46]Guo Y,Hawkins M,Wie B. Applications of generalized zero-effortmiss/zero-effort-velocity feedback guidance algorithm [J]. Journal of Guidance Control & Dynamics,2013,36(3):810-820.
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68918910
E-mail:gedt@bit.edu.cn
崔平远(1961- ),男,教授,博士生导师,主要研究方向:飞行器自主导航与控制、深空探测器自主技术与轨道设计。
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68918611
E-mail:cuipy@bit.edu.cn
Overview and Prospect of Planetary Landing Site Selection
GE Dantong1,2,CUI Pingyuan1,2
(1. Key Laboratory of Autonomous Navigation and Control for Deep Space Exploration,Ministry of Industry and Information Technology,Beijing 100081,China;2. Institute of Deep Space Exploration,Beijing Institute of Technology,Beijing 100081,China)
In planetary exploration, areas of scientific interest are usually full of hazards, which sets high requirements on landing safety. How to choose a proper landing site under engineering constraints and science objectives, while improving the reliability of the mission and obtaining high science return, has become one of the primary problems to be solved in future landing missions. In this paper, the landing site distributions in the past missions are reviewed, followed by a summary of the factors considered in the landing site selection process. After analyzing the current development situation, a general selection process of planetary landing sites is given. At last, some thoughts and suggestions on the landing site selection problem in future deep space exploration missions are presented.
planetary exploration;landing site selection;safe landing
V47
A
2095-7777(2016)03-0197-7
10.15982/j.issn.2095-7777.2016.03.001
葛丹桐(1992- ),女,博士生,主要研究方向:行星探测制导与控制、安全着陆与障碍规避。
[责任编辑:宋宏]
2016-05-31;
2016-06-17
国家重点基础研究发展计划“973”项目(2012CB720000);国家自然科学基金(61374216,61304226,61304248)
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
英语世界(2022年5期)2022-05-18
海外文摘(2021年7期)2021-08-31
空间科学学报(2021年2期)2021-07-21
太空探索(2020年10期)2020-10-22
大科技·百科新说(2020年10期)2020-03-01
百科探秘·航空航天(2019年4期)2019-06-11
百科探秘·航空航天(2019年5期)2019-06-06
深空探测学报(2016年4期)2017-01-18
航天器工程(2014年4期)2014-03-11