火星探测巡航段天文自主导航方法研究
2016-10-20 03:40:49陈晓尤伟黄庆龙
深空探测学报 2016年3期
陈晓,尤伟,黄庆龙
(1. 哈尔滨工业大学,哈尔滨 150001;2. 上海卫星工程研究所,上海 200240)
火星探测巡航段天文自主导航方法研究
陈晓1,2,尤伟1,2,黄庆龙2
(1. 哈尔滨工业大学,哈尔滨 150001;2. 上海卫星工程研究所,上海 200240)
对于火星探测巡航段的自主导航问题,提出了一种基于太阳及行星观测的自主导航方法。在巡航段初期及后期,根据探测器在太阳系中的位置关系,分别选择太阳、地球及太阳、火星作为观测目标,采用星载太阳敏感器和光学相机测量导航天体实现矢量,建立观测方程。利用非线性扩展卡尔曼滤波,分别建立两种观测方案对应的导航算法。仿真结果表明巡航段导航定位精度优于100 km,定速精度1 m/s。该方法实现简单,系统资源要求不高,对未来火星探测具有一定的工程参考价值。
火星探测;自主导航;视线矢量
引用格式:陈晓,尤伟,黄庆龙. 火星探测巡航段天文自主导航方法研究[J]. 深空探测学报,2016,3(3):214-218.
Reference format: Chen X,You W,Huang Q L. Research on celestial navigation for Mars missions during the interplanetary cruising [J]. Journal of Deep Space Exploration,2016,3(3):214-218.
0 引 言
深空探测具有飞行距离远、飞行环境未知因素多、飞行程序复杂、器地通信时延与损耗大、存在跟踪盲区与天体客观遮挡现象、自主性要求高等特点,对导航能力提出了更高的要求[1-2]。为了确保我国未来深空探测重大工程任务的顺利实施,提高深空任务的成功率,降低工程技术风险,深空自主导航是必须且亟待解决的关键基础问题之一。
目前基于光学的天文自主导航是研究的热点之一。美国最早在“水手号”[3-4]“海盗号”[5]“旅行者号”[6]等深空探测任务中,将星载敏感器获取的天文光学图像发送回地面导航系统进行处理后,再上传回深空探测器,实现了对天文光学导航方法的验证。“深空1号”是真正实现全过程自主导航的首个深空探测器。探测器在行星际巡航段通过测量小行星及背景恒星,实现了位置速度的自主估计[7]。
然而,对于火星探测任务,由于近地小行星数量有限且受到观测筛选准则的约束,可用的导航小行星数量不一定满足任务要求[7-8]。另外,地面站观测获得的小行星星历信息误差较大,从而无法获得满足导航精度要求的导航方案。自主光学导航方法在行星际巡航段中的应用还需进一步的研究。
对于深空探测的行星际巡航段,太阳是最稳定也是最重要的参考天体,且目前数字太阳敏感器结构简单,技术成熟,测量精度达到0.001°[9]。俄罗斯地球物理协会(Geofizika)研制的视场为92°×92°的CCD太阳敏感器,其测量精度达到角秒级[10]。同时,对于火星探测任务而言,地球和火星是巡航飞行过程最近的大天体,极易被观测到。通过星载光学导航敏感器可获得其视线矢量方向,测量精度也已达到角秒级。
因此,针对火星探测巡航段的自主导航,本文研究了一种基于太阳及行星视线方向的自主导航方法,根据探测器在太阳系中的位置关系,分别选择太阳、地球及太阳、火星作为观测目标,获取角度信息,并用扩展卡尔曼滤波对位置、速度等导航参数进行估计。
1 巡航段自主导航数学模型
1.1状态方程
以探测器在J2000日心黄道惯性坐标系下的空间位置与速度作为导航系统的状态矢量。

对于火星探测器而言,状态方程一般是依据卫星轨道动力学方程建立。在火星探测巡航段,主要考虑太阳、地球、火星等天体摄动,太阳光压摄动,探测器的修正推力等影响。在日心惯性坐标系下,轨道动力学方程的一般形式为
综上,可以将探测器轨道动力学方程表述为如下一般形式

1.2巡航段初期观测方程
在巡航段初期,考虑到探测器在太阳系空间中的位置,地球和太阳是最易被观测到的两个天体。巡航段初期观测方案如图1所示,利用星载导航敏感器和太阳敏感器分别获得地球、太阳的光学图像,进而提取这两个参考天体相对探测器的视线矢量,然后结合导航滤波算法实现自主导航。
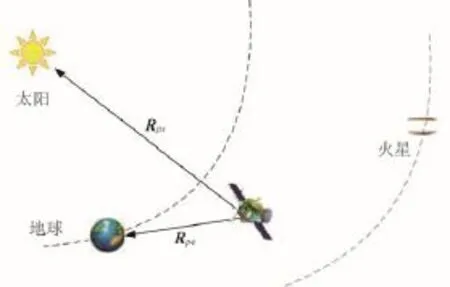
图1 巡航段初期观测方案Fig.1 Observation scheme in the beginning of interplanetary cruise
导航敏感器探测到的导航天体视线方向矢量可用成像传感器中的像元和像线值表示

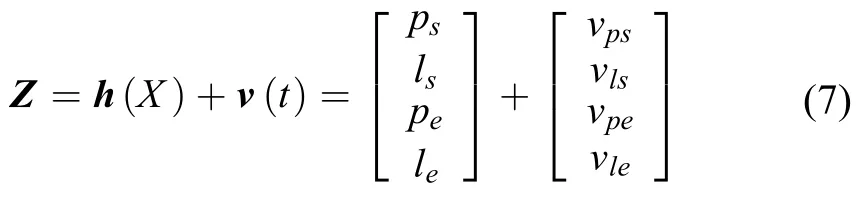
1.3巡航段末期观测方程
在巡航段末期,探测器将逐步靠近火星,火星的视星等逐步减小。探测器利用星上导航敏感器和太阳敏感器获得火星、太阳的光学图像,进而提取参考天体相对于探测器的视线矢量,然后结合导航滤波算法实现自主导航,如图2所示。
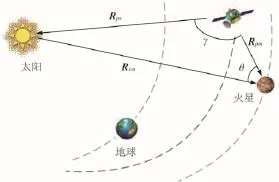
图2 巡航段末期观测方案Fig.2 Observation scheme in later interplanetary cruise
该观测方案同样可用上述方法建立量测方程,这里给出另一种量测方程的建立思路。
在日心惯性坐标系中,根据图2中各视线矢量的几何关系,可以有
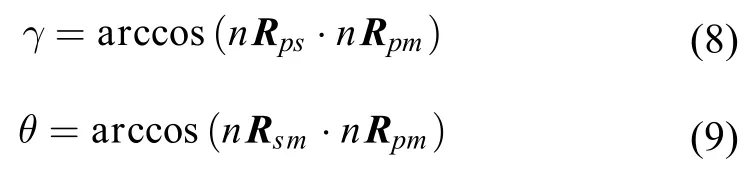
探测器在惯性系中的位置
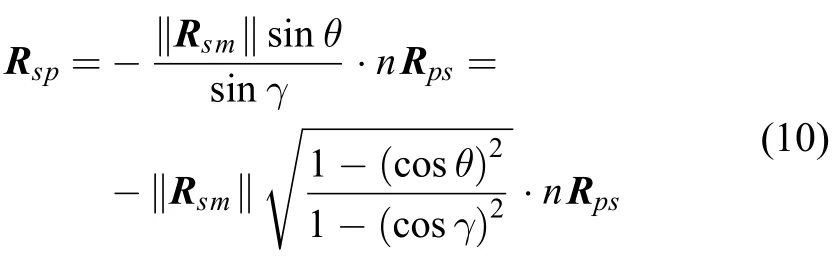

忽略观测量中的高阶小量,由太阳和火星视线信息得到探测器位置矢量的观测方程可表示为

1.4导航滤波算法
考虑到观测方程的非线性和星上计算能力的约束,本文选用基于滤波值线性化的滤波方式,即扩展Kalman滤波。
对于如下的导航系统
由扩展卡尔曼滤波算法可得,状态转移矩阵及量测矩阵为
基于EKF的自主导航滤波算法如下:

2 仿真分析
2.1仿真条件
以火星探测2020年发射窗口为例,对地火转移段基于太阳及地球/火星视线信息的自主导航方法进行仿真。仿真中所使用的参数如下:
1)探测轨道:在J2000.0日心惯性坐标系下,发射日期2020年7月22日21:46:07(UTC),到达日期2021年1月21日23:59:07(UTC)。
2)测量误差:1”。探测器在飞行过程中通过敏感器合理布局及姿态机动实现对太阳及地球/火星视线信息的测量。
3)初始误差:三轴位置误差50 km,三轴速度误差10 m/s。
2.2仿真结果与分析在巡航段初期,以观测方案一进行自主导航仿真。仿真时间自发射后3天至发射后23天,得到位置和速度估计误差仿真曲线如图3所示。
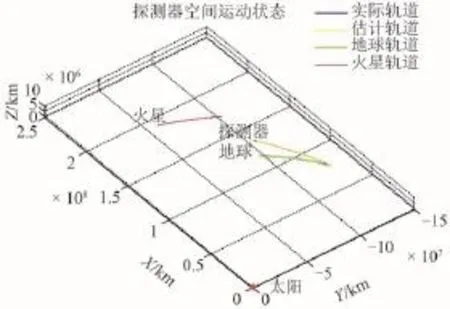
图3 巡航段初期探测器空间运动状态Fig.3 Probe track in the beginning of interplanetary cruise
探测器的位置与速度估计结果分别如图4、5所示。
图4、5中纵轴分别表示探测器位置估计误差、速度估计误差,横轴为仿真时间。从仿真结果可见,卫星的位置估计误差为[-112.194 94.159 25.242] km,速度估计误差[-0.083 -0.0233 -0.350] m/s。同时,状态误差具有较好的滤波收敛速度和效果,在仿真2 000步时就基本上趋于稳定,且最终估计误差满足卫星自主定轨精度的需求。
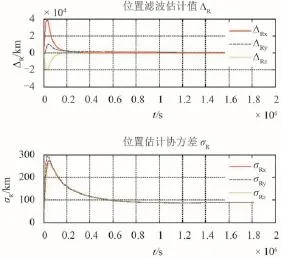
图4 三轴位置估计误差Fig.4 Estimate error of three-axis position
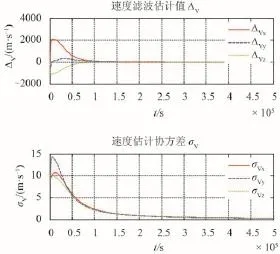
图5 三轴速度估计误差Fig.5 Estimate error of three-axis velocity
在巡航段后期,以观测方案二进行自主导航仿真。仿真时间自到达火星前30天至到达火星前5天,得到位置和速度估计误差仿真曲线如图6~8所示。
从仿真结果可见,卫星的位置估计误差为[-114.937 -171.466 -97.925] km,速度估计误差为[-0.141 0.357 -0.020] m/s。
在仿真过程中发现,当量测噪声R取较大值时,滤波结果会出现发散现象。因此,改善导航相机性能可以有效提高卫星定位精度。另外,在量测噪声一定的前提下,滤波周期较大时,可以在一定程度上抑制滤波结果的发散现象,但同时会导致系统状态方程线性化误差的增加,所以,如何更好地协调滤波周期和状态方程线性化误差将是进一步研究的重点。
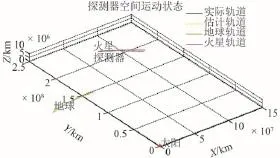
图6 探测器空间运动状态Fig.6 Probe track in the later of interplanetary cruise
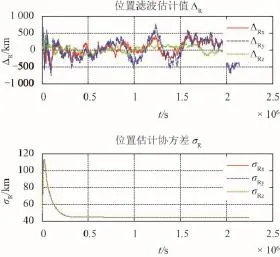
图7 三轴位置估计误差Fig.7 Estimate error of three-axis position
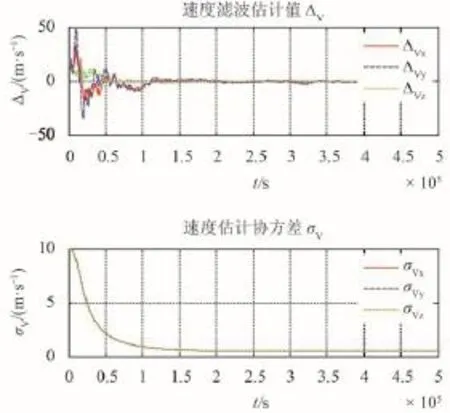
图8 三轴速度估计误差Fig.8 Estimate error of three-axis velocity
3 结 论
本文研究了火星探测巡航段仅利用星载光学导航敏感器来自主确定位置及速度的导航方案,设计了基于太阳、地球的巡航段初期观测方案及基于太阳、火星视线矢量的巡航段后期观测方案,给出了导航系统的扩展卡尔曼(EKF)滤波算法。以火星探测2020年窗口为例开展数学仿真,仿真结果显示该导航方法三轴位置估计误差优于120 km,三轴速度估计误差优于0.5 m/s,能够满足火星探测任务导航需求。且该方法实现简单,对星上资源需求不高,具有一定的工程实际应用意义。
[1]房建成,宁晓琳. 深空自主天文导航方法[M]. 西安:西北工业大学出版社,2010:44-45. Fang J C,Ning X L. Autonomous celestial navigation method for deep sapce probe[M]. Xi'an:Northwestern Polytechnical University Press,2010:44-45.
[2]崔平远,徐瑞,朱圣英,等. 深空探测器自主技术发展现状与趋势[J]. 航空学报,2014,35(1):13-28. Cui P Y,Xu R,Zhu S Y,et al. State of the art and development trends of on-board autonomy technology for deep space explorer[J]. Acta Aeronautica Sinica,2014,35(1):13-28.
[3]Duxbury T C,Born G H,Jerath N. Viewing phobos and deimos for navigating mariner 9[J]. Journal of spacecraft and Rockets,1974,11(4):215-222.
[4]Stanton R H,Ohtakay H. Demonstration of optical navigation measurements on Mariner 10[C]//Proceedings of the AIAA the 13rd Aerospace Sciences Meeting. [S.l.]:AIAA,1975:1-11.
[5]Rourke K H,Acton C H. The determination of the interplanetary orbits of vikings 1 and 2[C]//Proceedings of the AIAA the 15th Aerospace Sciences Meeting. [S.l.]:AIAA,1977:1-24.
[6]Suyyott S P,Donegan AJ. Interplanetary optical navigation:voyager uranus encounter[C]//Proceedings of AIAA Astrodynamics Conference. [S.l.]:AIAA,1986:192-206.
[7]Yim J R,Crassidis J L,Junkins J L. Autonomous orbit navigation of interplanetary spacecraft[C]//AIAA/AAS Astrodynamics Specialist Conference. Reston:AIAA,2000:53-61.
[8]张伟,陈晓,尤伟,等. 光谱红移自主导航新方法 [J]. 上海航天,2013(2):32-33. Zhang W,Cheng X,You W,et al. New autonomous navigation method based on redshift[J]Aerospace Shanghai,2013(2):32-33.
[9]常晓华,崔平远,崔祜涛. 太阳矢量在行星际探测器姿态估计中的应用研究[J]. 宇航学报,2010,3:758-763. Chang X H,Cui P Y,Cui H T. Research of vector in attitude estimation of interplanetary spacecraft[J]. Journal of Astronautics,2010,3:758-763.
[10]饶鹏,孙胜利. 高精度CCD太阳敏感器的研制[J]. 红外技术,2007,29(8):475-479. Rao P,Sun S L,Chen G L. Development of high-accurace CCD Sun sensor[J]. Infrared Technology,2007,29(8):475-479.
通信地址:上海市闵行区元江路3666号(201109)
电话:(021)24230422
E-mail:xchen509@126.com
尤伟(1985- ),男,博士研究生,主要研究方向:航天器导航、制导与控制。
通信地址:上海市闵行区元江路3666号(201109)
电话:(021)24230419
E-mail:youwei316@126.com
黄庆龙(1989- ),男,硕士,主要研究方向:航天器导航、制导与控制。
通信地址:上海市闵行区元江路3666号(201109)
电话:(021)24230431
E-mail:deepspace509@126.com
Research on Celestial Navigation for Mars Missions during the Interplanetary Cruising
CHEN Xiao1,2,YOU Wei1,2,HUANG Qinglong2
(1. Harbin Institute of Technology,Harbin 150001,China;2. Shanghai Institute of Satellite Engineering,Shanghai 200240,China)
For the issue of navigation during the interplanetary cruising,a celestial navigation based on the Sun and Planets observation is proposed. According to the position of a probe in solar system,Sun/Earth and Sun/Mars are selected as targets for navigation observing. Respectively,Sun sensor and optics navigation sensor on the probe are used to measure line of sight. The fundamental of the observation schemes is analyzed and the measurement equations are educed in details. The orbit parameters of the probe are estimated in real time by utilizing extended Kalman filter. Finally,the autonomous navigation methods presented are verified by the data of 2020 Mars mission. Simulation result shows that the estimation accuracy of position and velocity can meet the requirements of the interplanetary cruising phase.
Mars exploration;autonomous navigation;line of sight
V488.22+4
A
2095-7777(2016)03-0214-5
10.15982/j.issn.2095-7777.2016.03.003
陈晓(1986- ),男,博士研究生,主要研究方向:航天器导航、制导与控制。
[责任编辑:杨晓燕]
2016-05-26;
2016-06-20
猜你喜欢
特区文学·诗(2021年6期)2021-12-22 01:02:51
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
海外文摘(2021年7期)2021-08-31 21:33:44
大科技·百科新说(2020年10期)2020-03-01 05:25:19
金色少年(奇趣科普)(2017年11期)2017-11-28 05:41:41
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
当代贵州(2015年19期)2015-06-13 09:42:32
新疆农垦科技(2014年9期)2014-02-28 19:21:04
出版与印刷(2013年3期)2013-01-31 03:26:11