天文导航在航天工程应用中的若干问题及进展
2016-10-20 03:40张伟张恒
深空探测学报 2016年3期
张伟,张恒
(1. 上海卫星工程研究所,上海 201109;2. 上海市深空探测技术重点实验室,上海 201109)
天文导航在航天工程应用中的若干问题及进展
张伟1,2,张恒1,2
(1. 上海卫星工程研究所,上海 201109;2. 上海市深空探测技术重点实验室,上海 201109)
导航作为航天器核心技术之一,是确保航天任务成败的关键。天文导航以其连续性好、自主性强、实时性优、导航精度高等优点,逐渐成为航天器导航的有效手段。基于国内外天文导航理论及应用的现状,结合近地卫星、深空探测任务特点,探讨了天文导航在航天工程应用中的理论问题与技术问题,如导航目标源观测量精确建模问题、高精度感知与检测问题等,并对新型天文导航技术进行了展望,指出了未来天文导航理论与技术的发展方向,为解决航天工程中的连续自主、实时高精度导航问题提供了有效途径,为学术与工程界进一步深入开展航天器天文导航理论与技术研究提供参考。
天文测速导航;组合导航;天文测速导航仪
引用格式:张伟,张恒. 天文导航在航天工程应用中的若干问题及进展[J]. 深空探测学报,2016,3(3):204-213.
Reference format: Zhang W,Zhang H. Research on problems of celestial navigation in space engineering [J]. Journal of Deep Space Exploration,2016,3(3):204-213.
0 引 言
导航作为航天器核心技术之一,是确保航天任务成败的关键。航天器导航可分为自主导航、非自主导航,主要导航方式如图1所示。天文导航是利用敏感器测量自然天体(地球、月球、太阳、其他行星和恒星)导航信息,确定航天器位置和速度的一种导航方法,具有连续性好、自主性强、实时性优、导航精度高等优点,并逐渐成为航天器导航的有效手段。
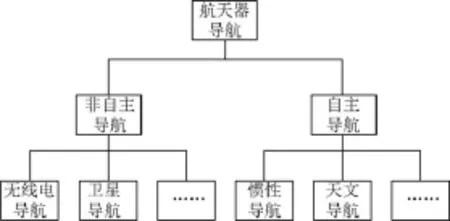
图1 航天器主要导航方式Fig.1 Navigation method of spacecraft
对于近地卫星而言,非战时近地卫星以无线电导航/卫星导航为主、天文导航为辅,但随着卫星数目的增多,数量有限的地面站将难以承受巨大的导航压力,同时维持地面站的正常运转需要昂贵的人力、物力代价;战时以无线电导航为代表的地基导航与以GPS、北斗为代表的天基导航应用受限,而天文导航因其自主性则可有效避免上述问题。不难看出,天文导航对提高近地卫星的自主运行、自主管理和在轨生存能力具有重要意义。
近地天文导航方法[1]有直接敏感地平的天文导航方法、基于星光大气折射间接敏感地平的天文导航方法、基于日-地-月方位信息的天文导航方法等,具体如表1所示。
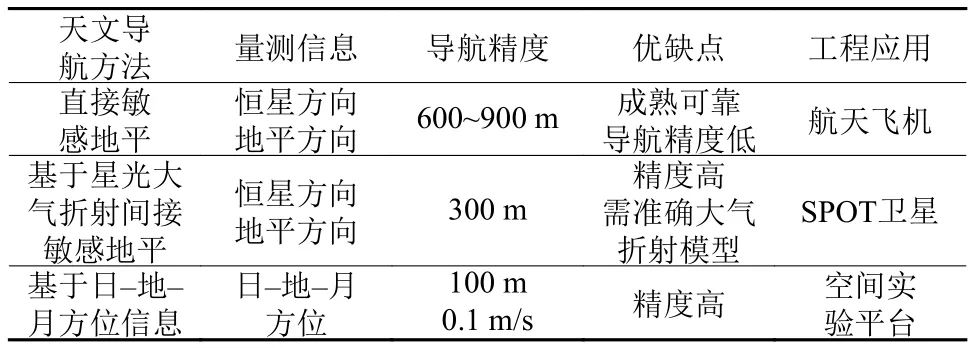
表1 近地天文导航方法Table 1 Celestial navigation method of near-Earth satellite
对于深空探测器而言,深空探测具有飞行距离远、飞行环境未知、飞行程序复杂、探测对象不确定、器地通信时延与损耗大等特点,对导航的自主性、实时性、精度要求更高。无线电导航存在跟踪盲区、日凌、天体遮挡等连续性、自主性问题,因此天文导航研究具有重要意义。为了确保未来深空探测重大工程任务的顺利实施,提高深空任务的成功率,降低工程技术风险,深空天文导航是必须且亟待突破的关键技术之一。
深空天文导航方法有基于测角信息的天文导航方法[2-3]、基于测距信息的天文导航方法[4-5]及张伟等(2013)在文献[6]首次提出的基于测速信息的天文导航方法,具体如表2所示。
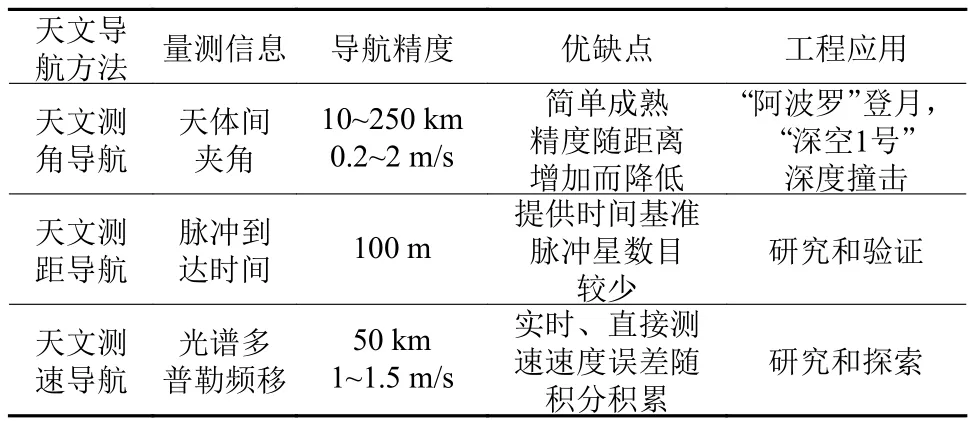
表2 深空天文导航方法Table 2 Celestial navigation method of deep-space probe
天文导航以其自主性强、可靠性高等特点,在未来航天工程应用中将发挥越来越重要的作用。与此同时,天文导航在航天工程应用中也存在统一时空基准问题、导航目标源观测量精确建模问题、高精度动力学建模问题、新型量测原理问题、先进导航算法问题等理论问题及高精度感知与检测问题、导航量测信息的连续性与选取问题、导航敏感器工程实现与在轨应用问题等技术问题。本文将从天文导航的理论问题、技术问题、研究进展与关注方向3个方面,综述天文导航在航天工程应用中的若干问题,并对未来天文导航的发展方向进行展望。
1 天文导航的理论问题
1.1统一时空基准问题
统一时空基准是航天器高精度导航定位的前提。航天器天文导航的内涵是在航天器本体时空框架下,利用自然天体量测信息确定航天器相对于目标天体的位置和速度。时空信息是不可或缺的基本要素,时间与空间基准的精确性与统一性至关重要[7]。在航天工程应用中,不可避免存在不同时空基准间转换误差、多源信息融合过程中的时空配准(如图2所示)、接近经典物理学适用范围边缘的时空扭曲等现象,难以获得统一时空基准。具体表现如下。
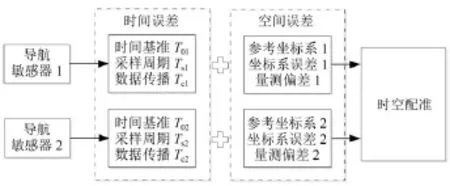
图2 多源信息融合过程时空配准Fig.2 Time and space registration in process multisensors' information fusion
1)在航天工程应用中,不同条件需采用不同的时间基准与空间基准。以火星探测为例,在时间基准方面,地面时钟采用协调世界时,星载时钟采用原子时,行星星历及动力学递推采用动力学时;空间基准方面,近地段、地火转移段、环火段轨道动力学模型分别在地心赤道惯性坐标系、日心黄道坐标系、火心赤道惯性坐标系下建立,不可避免存在不同时空基准之间的转换及转换误差,时空基准转换误差会对航天器位置和速度产生影响。
2)在天文组合导航系统多源信息融合过程中,各导航敏感器时间基准误差、采样周期不统一、数据传播延迟等都会造成时间不同步,导航敏感器坐标系基准误差、参考坐标系不一致、不同位置传感器带来的空间量测偏差等会引起空间误差。时间、空间误差在天文组合导航系统位置估计和速度估计中作用机理复杂,对位置和速度量测信息会带来很大的影响。
3)与近地卫星不同,深空探测器在太阳系大时空尺度内飞行,如图3所示,其飞行速度、时间和距离远超近地卫星,并且随着航天技术的不断进步,深空探测器飞行的时空尺度正逐步接近经典物理学使用范围的边缘,相对论效应的影响将不可忽略。
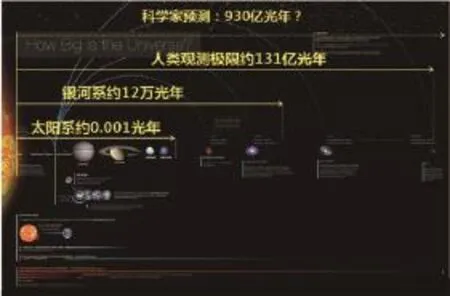
图3 深空大尺度飞行Fig.3 Deep space flight in large-scale
对于天文导航统一时空基准而言,如何从时间、空间、物质运动本质出发,建立航天器飞行全过程时空基准体系是值得进一步研究的问题,其难点主要体现在时空基准转换误差特性及影响机理分析与抑制;多源信息融合过程中时空配准方法的适用性与有效性;大尺度、高速运动相对论效应带来的时空误差对导航精度的影响分析与补偿;对时间、空间、物质运动本质的认识与理解。
1.2导航目标源观测量精确建模问题
导航目标源观测量精确建模是根据导航目标天体(恒星、行星、卫星、小行星、彗星等)的几何、运动、光强和光谱等特性,获得导航源的误差特性,为天文导航方案中导航天体选取、导航敏感器设计、导航滤波算法的选择提供设计输入。导航目标源类型多样、尺度跨度大、信号种类复杂(包括可见光、红外、紫外、X射线等),难以建立精确的先验模型。具体表现如下。
1)天文测角导航以行星及其卫星、小行星、彗星、恒星等光学图像信息(运动、几何与辐射等特性)为目标源[8],如图4所示,行星亮度最高,也最易观测,但数量太少;卫星数量较多,但围绕行星运行,观测距离有限;彗星和小行星数量众多,彗星的彗核被彗发包裹,从图像中提取彗核中心比较困难,小行星形状不规则、表面反照率不均匀,质心提取难度大;恒星星表数据量巨大,不利于识别的实时性以及存储的简化性。显然,天文测角导航目标源类型多样、形状各异、距离范围大、亮度变化大,存在星历误差、几何质心误差等源端误差影响,与此同时导航源与探测器的相对运动以及探测器平台扰动会影响导航图像像质,影响测角导航精度。

图4 天文测角导航目标源Fig.4 Source of celestial angle-measurement
2)天文测距导航以脉冲星X射线频段辐射信息为目标源,如图5所示,脉冲星是高速自转的中子星,具有极稳定的周期,在射电、红外、可见光、紫外、X射线和γ射线等电磁波频段均产生信号辐射,在X射线频段集中了脉冲星绝大部分辐射能量,但数量有限、信号微弱,易受银河系背景和太阳辐射的影响。脉冲星导航目标源受脉冲星方向误差、星表位置误差、背景辐射等随机误差和系统误差的影响。
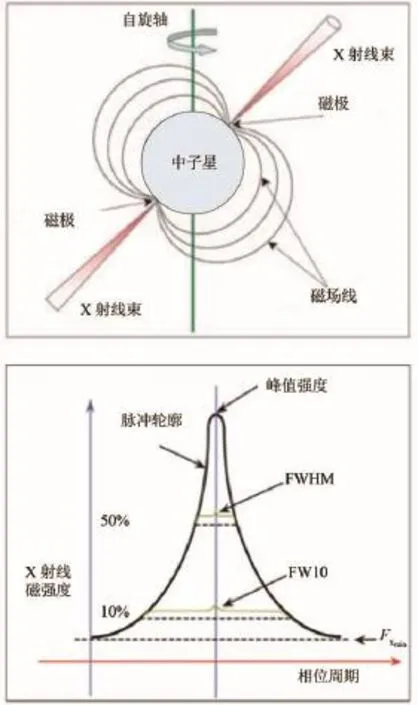
图5 典型脉冲星结构与轮廓Fig.5 Formation and contour of typical pulsar
3)天文测速导航以太阳、系外恒星等光谱特征谱线信息(谱线强度、谱线波长、谱线宽度、谱线误差等特性)为目标源,谱线存在压力致宽、微观多普勒致宽(如热运动和湍动)、宏观多普勒致宽(如恒星自转)等谱线致宽机制及局地爆发、光谱不稳定等因素影响,如图6所示。
对于天文导航目标源而言,如何找到一种稳定性好、信噪比高、可精确建模的导航信息源是值得进一步研究的问题,其难点主要表现在导航目标天体星历误差、质心误差机理分析与精确建模;高精度导航脉冲信号周期与轮廓的精确地面模拟;太阳及系外恒星光谱特征谱线的稳定性(空间稳定性、时间稳定性)分析;导航目标源系统误差与随机误差的精确建模与高精度辨识。
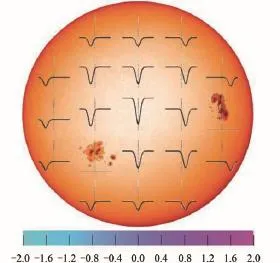
图6 太阳光谱Fig.6 The spectrum of Sun
1.3高精度动力学建模问题
航天器天文导航系统的状态方程通常根据轨道动力模型建立,因此轨道动力学的高精度建模是确保航天器导航性能的重要因素。对于近地卫星,动力学建模需要考虑地球非球形引力摄动、大气阻力摄动、太阳光压摄动等因素影响;对于深空探测器,动力学建模需考虑太阳、行星等多体引力摄动及空间环境未知与探测对象不确定等因素影响[9-11]。当前动力学建模均采用简化模型,与实际动力学环境存在一定差异,难以保证导航算法的高精度估计及导航系统性能。具体表现如下。
1)摄动源建模困难,如低轨卫星大气阻力摄动表面力建模困难,高轨卫星太阳光压摄动表面力建模困难等。大气阻力摄动物理机制是大气分子撞击飞行器表面产生的动量交换,与大气密度、航天器迎流面面积、相对运动速度密切相关。大气密度影响因素复杂,如太阳活动峰年与谷年及昼夜、地球磁场活动等;迎流面积涉及到复杂的积分运算并与航天器姿态有关。上述因素均造成大气阻力摄动力计算困难。太阳光压摄动物理机制是辐射粒子与航天器表面的动量交换,与太阳光压强度、航天器光压系数、面质比密切相关。辐射粒子与航天器表面的作用分为吸收和反射,根据表面材料的特征,反射又分为镜面反射和漫反射。实际上航天器表面材料特征比较复杂,表面光学特性的变化、几何形状的变化(如太阳帆板的转动等)、表面的局部阴影等均造成太阳光压摄动力计算困难。
2)对于深空探测器而言,存在多体引力摄动、不规则引力场建模、连续小推力等非开普勒轨道(见图7)以及空间环境和探测对象未知与不确定问题。航天器在太阳系多体引力场中的运动轨迹均为非开普勒轨道,对于限制性三体问题存在5个特解,多体运动方程尚未得到完全的解析解,通常简化为受摄二体问题求解,存在较大误差,而数值方法依赖于强大的计算能力。小天体形状各异、形态复杂,不规则引力场建模相对困难,目前常用方法有级数逼近法(如球谐函数模型和椭球谐函数模型)、三维模型逼近法(如三轴椭球体模型、多面体模型和质点群模型)。级数逼近法可给出解析表达,但建模精度不高;三维模型逼近法建模精度较高,但只能通过数值计算,无解析表达。与此同时,未来小行星探测需采用高比冲电推进技术,传统转移轨道设计中的解析结论均不再适用,需解决连续小推力轨道设计与优化问题。
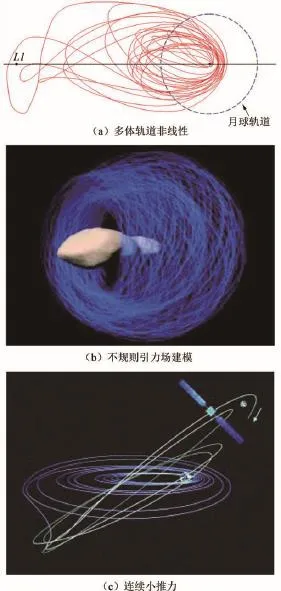
图7 非开普勒轨道Fig.7 Non-Keplerian orbit
对于天文导航系统动力学建模而言,如何建立复杂度适中并且满足导航精度需求的高精度动力学模型是值得进一步研究的问题,其难点主要表现在行星高阶重力场模型、不规则小行星引力场模型、准确大气摄动模型、复杂太阳光压模型、精确推力模型的建立与分析;空间环境和探测对象未知与不确定性的实时在线高精度估计;动力学建模精度需求与数值计算能力之间的折中与平衡。
1.4新型量测原理问题
天文导航量测原理可分为天文测角原理、天文测距原理、天文测速原理,主要以宇宙空间中的自然天体为导航目标源,以可见光敏感器为导航敏感器,以天体视线方向和天体间角度、脉冲到达时间、视向速度为量测信息,建立相应的量测方程。采用单一量测原理时,速度需通过位置微分获得,位置需通过速度积分获得,不可避免存在误差放大等现象。具体表现如下。
1)天文测角原理以天文光学图像为导航目标源,通过天体图像的角度量测,获得瞬时位置参数,位置微分确定航天器速度;天文测距原理以X射线脉冲星为导航目标源,通过脉冲到达时间量测,获得瞬时位置参数,位置微分确定航天器速度;新型天文测速原理则以天文光谱为导航目标源,通过光谱的多普勒频移直接获得速度信息,速度积分确定航天器位置。从本质上看,天文测角导航、天文测距导航均是通过敏感光子密度获取航天器位置信息的量测,而新型测速导航原理则通过敏感光子分布直接获取航天器速度信息的量测,但位置误差会随速度积分积累,具体如表3所示。
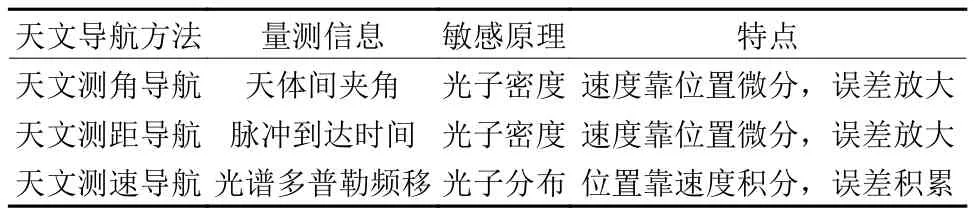
表3 天文导航量测原理Table 3 Measurement principle of celestial navigation
2)天文导航系统量测的完备性可通过系统可观测性反映,可观测阶数、可观测度是对系统可观测性的量化描述,反映了导航系统利用有限时间内量测信息确定系统状态的能力[12-14]。可观测矩阵直接表征了导航系统的可观测度。对于线性时变系统,可以利用分段定常系统(Piece-Wise Constant System,PWCS)得到可观测矩阵,即在一个足够小的时间区间内,将时变系统系数矩阵视为不变,此时时变系统可作为定常系统处理;对于非线性时变系统,可利用李导数定义可观测矩阵。表4给出了典型天文导航系统的可观测阶数与可观测度。
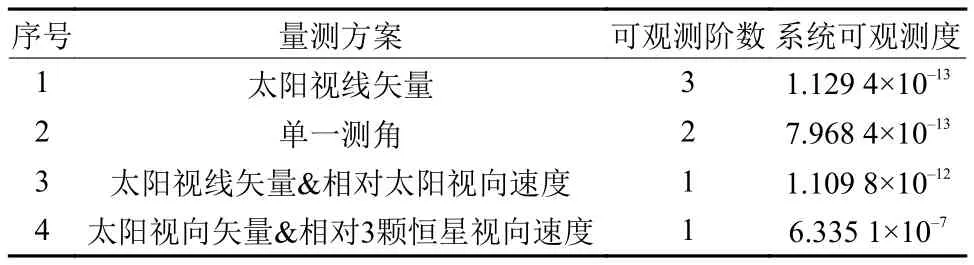
表4 典型量测方案可观测度Table 4 The observability degree of typical measurement
3)新型天文测速量测原理中存在天文光谱谱线随机等源端误差、测速导航敏感器误差、速度解算误差等系统误差与随机误差影响,如图8所示。
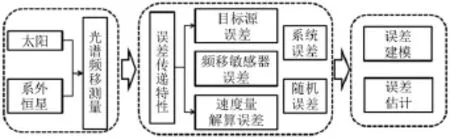
图8 天文测速导航误差传播机理Fig.8 Error transmission of celestial velocity measurement navigation
对于天文导航量测原理而言,如何消除新型量测原理中误差传播的不利影响是值得进一步研究的问题,其难点表现在:传统测角、测距导航原理中速度误差的辨识与估计;新型测速导航原理中位置误差的抑制与补偿及误差传播机理的分析与估计;非线性天文导航系统可观测性分析及可观测度的提高;基于新型导航目标源特性的量测新原理的探索与发现。
1.5先进导航算法问题
航天器天文导航系统不可避免存在一定误差,要获得高精度状态估计,需要采用先进的导航算法进行实时在线高精度估计。天文导航系统属于典型的非线性系统,噪声分布不能简单视为高斯噪声。常用的导航算法主要有基于卡尔曼滤波的EKF、UKF,基于粒子滤波的UPF等。EKF计算效率高、应用广泛,但精度不高、稳定性差;UKF精度较高,但对模型噪声敏感;UPF精度高,但计算量大[15-16]。现有非线性导航滤波算法必须根据具体应用场合和条件,在收敛性、稳定性、估计精度及计算量等指标之间综合权衡。具体表现如下。
1)导航算法对系统模型的适用性是需要考虑的首要问题。扩展卡尔曼滤波(EKF)要求系统状态方程可导,对于本质非线性的系统不再适用,而粒子滤波(PF)则适用于非高斯非线性系统,神经网络滤波(ANN)则不依赖于模型,适用性强,但需要大量的训练样本[17]。导航算法适用条件如表5所示。
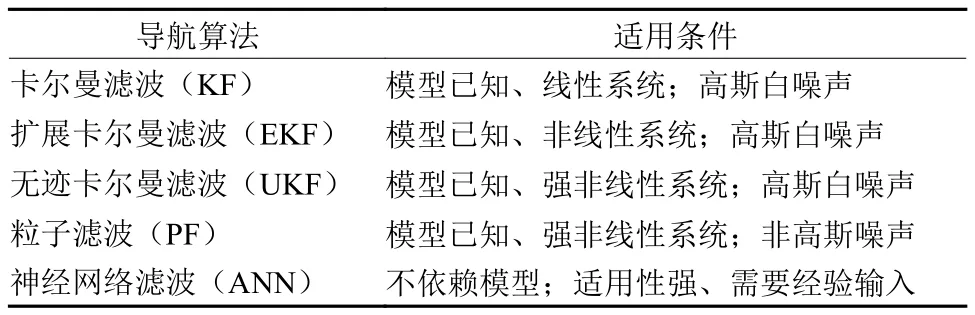
表5 导航算法的适用性Table 5 The feasibility of navigation algorithms
2)导航算法的性能指标包括估计精度、计算量、复杂性、收敛速度等。粒子滤波器(PF)的估计精度最高、计算量最大,相对而言,扩展卡尔曼滤波(EKF)估计精度不是很高,计算量较少,需要矩阵求导,相对复杂。对于精确的系统模型,收敛速度UKF>EKF>PF;对于有误差的系统模型,EKF、UKF收敛缓慢甚至无法收敛,而粒子滤波(PF)以一种振荡的方式收敛[18-19]。在航天工程应用中,需对天文导航算法性能综合评估,具体如表6所示 。
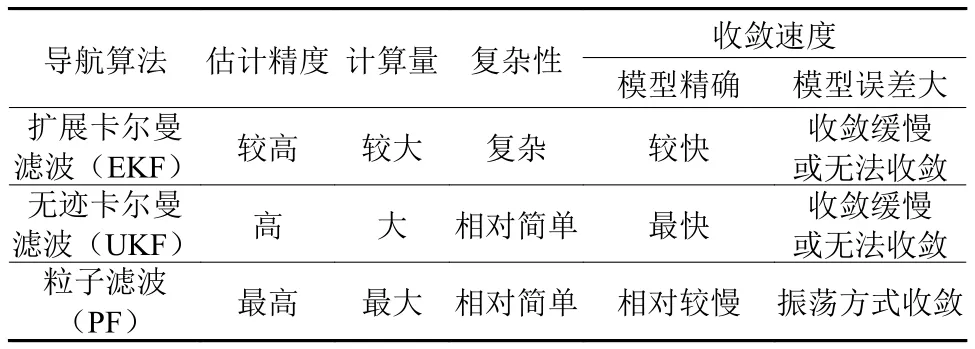
表6 导航算法的性能指标Table 6 The performance of navigation algorithms
3)导航算法的稳定性是指随着滤波时间递推,系统不受估计值初值和协方差初值影响,那么滤波是稳定的。系统随机可控和随机可观是导航算法稳定的充分而非必要条件,即存在一定的判断模糊性与局限性[20-21]。同时计算机字长限制、滤波递推等都会使舍入误差和截断误差逐步积累,导致误差协方差矩阵失去对称性,使得滤波异常。
4)对于深空探测器而言,空间环境、探测对象等存在未知与不确定性,天文导航系统存在未知干扰且系统噪声和测量噪声为非高斯分布,需具有自适应补偿能力的非线性滤波算法。
对于天文导航系统导航算法而言,如何针对不同误差特性,找到相匹配的、工程可用的高精度天文导航滤波算法是值得进一步研究的问题,其难点表现在:导航算法的适用性、稳定性、计算精度等性能分析与优化;针对非线性、非高斯、不确定性的天文导航系统,具有自适应补偿能力的非线性导航滤波算法的提出与应用;导航算法精度与计算效率之间的平衡。
2 天文导航的技术问题
2.1高精度感知与检测问题
高精度感知与检测是高精度天文导航的前提与保障。根据导航目标源的运动、几何、辐照等目标特性获取导航目标源特性,利用图像处理、特征提取和光谱检测等方法确定航天器位置、速度等导航信息。在工程应用中不可避免地存在天体信号暗弱、杂光干扰、微振动影响等现象,难以获取高精度导航信息。具体表现如下。
1)以天文光学图像为导航信息源:要求对各类导航天体大尺度、大动态范围快速感知与高精度成像。天文测角导航敏感器由于天体运动、离焦以及光学成像系统的像差及信号传输过程中的噪声等因素引起导航天体图像模糊,需要对原始光学导航天体图像进行预处理并针对点、面、星迹等目标设计相应的感知与提取算法,如图9所示。
2)以天文X射线脉冲为导航信息源:要求对脉冲星X射线信号高灵敏度、高精度探测与处理。天文测距导航敏感器脉冲检测误差、背景噪声及数据处理误差等因素影响脉冲到达时间量测信息准确性[22-24]。
3)以天文光谱为导航信息源:要求对太阳、系外恒星天体光谱高分辨率、高稳定性、高精度鉴频与检测。天文测速导航敏感器设计、加工、装调、在轨使用过程中因温度、压力、重力、振动等因素引起的光谱检测误差,需要对原始光谱图像进行处理,最终实现测速导航误差的高精度估计。
对于天文导航系统感知与检测而言,如何在轨实现对导航目标源信息的快速感知与高精度检测是值得进一步研究的问题,其难点表现在:导航目标天体的快速感知与导航图像的预处理及像质改善方法;超高分辨率、高稳定性、高定标精度光谱谱线感知与检测;导航脉冲星强背景噪声下弱信号的提取与处理。
2.2导航量测信息的连续性与选取问题
对于近地卫星,主要导航天体为地球、月亮、太阳、恒星,绕地周期运动会导致观测视场频繁切换或天体不可见,导航观测不连续。对于深空探测器,主要观测天体为恒星、行星、小行星,飞行距离远、飞行环境复杂导致目标源切换或不可见,导航数据不连续。为保证不同任务在不同阶段可高精度实时连续导航,需要多种量测信息切换和组合,在天文导航应用局限的情况下,还需与其他导航方法组合。具体表现如下。
1)导航过程中,可能出现导航源间断性可见、视场不断切换等情况。为保证导航的连续性,需要优化不同导航目标源间的切换时机与不同导航方法间的交接班策略。
2)单一导航方法存在固有局限,需要结合其他导航方法,合理分配不同导航信息权重,以进一步提高导航精度。
对于量测信息而言,如何从根本上解决天文导航量测信息的连续性与选取问题是值得研究的问题,其难点表现在:不同导航方法、导航目标源之间的高可靠快速切换;多种导航方法的高效组合及导航信息权重的有效优化。
2.3导航敏感器工程实现与在轨应用问题
导航敏感器是天文导航系统的核心组成部分。导航敏感器敏感天体辐射或反射的光,获取被观测天体相对于航天器的位置或速度信息,为导航解算提供观测信息,通常由光学系统、光电转换器件和处理电路组成。在实际应用过程中,由于星上资源有限,不可避免地存在导航仪器体积、重量、功耗、实时性等约束,高精度导航敏感器的工程实现和在轨应用受限。具体表现如下。
1)为满足高精度导航需求,导航敏感器的性能要求越来越高,要求精度高、体积小、重量轻、功耗低。
2)为了实现航天器的快速导航定位,要求导航输出的实时性高,存在先进算法与有限星载计算能力等矛盾。
3)宇宙空间存在大量空间粒子与辐射干扰,要求导航敏感器抗干扰、抗辐射能力强、空间环境适应性强。
对于工程实现与在轨应用而言,如何科学实现高精度导航敏感器的工程化是值得研究的问题,其难点表现在:高精度导航敏感器的轻小型化设计;星载计算机在轨实时导航解算能力的提升;高精度导航敏感器空间宇宙环境适应性设计与抗辐照优化;导航敏感器可靠性、安全性保证。
3 天文导航研究进展与关注方向
3.1研究进展
1)新型天文测速导航基本原理
张伟等(2013)在文献[6]提出基于光谱多普勒频移的新型天文测速导航方法:航天器在接收恒星光谱时,若航天器相对于恒星的位置是静止的,那么航天器上接收的恒星光谱就是恒定的;若航天器相对于恒星的位置是变化的(视线方向接近或远离),那么所接收的光谱就会有波长的漂移,波长的漂移表现在光谱上就是谱线的移动。
天文测速导航是一种新型天文导航方法。航天器通过测量太阳或恒星特征谱线的多普勒频移,获取航天器与恒星的相对运动速度,速度积分获得位置,利用几何解析的方法或结合轨道动力学滤波解算航天器位置、速度等导航信息。天文测速导航的基本原理如图10所示。
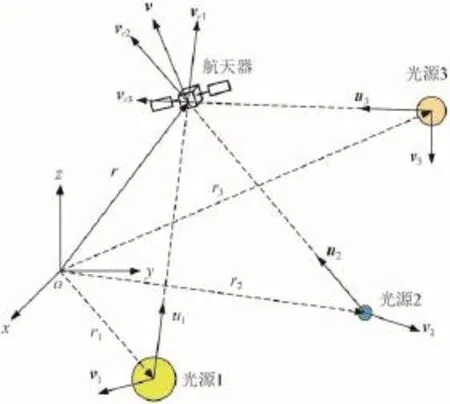
图10 新型天文测速导航原理Fig.10 New celestial velocity measurement navigation method
2)天文测角测速组合导航
天文测角导航的速度信息是通过位置差分获得,其瞬时速度估计精度不高;天文测速导航的位置信息通过速度积分获得,存在随时间发散的问题。因此,两种导航方法的量测信息均存在各自不足,无法实现对位置与速度信息的整体优化估计。通过对测角、测速信息的有效融合,可以避免测角、测速导航的不足,实现对定位、定速信息的整体优化估计。
天文测角测速组合自主导航方法通过对不同导航方法的有效融合,充分利用深空中的天然资源,增加量测信息的种类、丰富导航手段,弥补天文测角、测速方法的不足,可为实现深空探测连续实时、自主高精度导航提供有效保障。天文测角测速组合自主导航系统如图11所示。
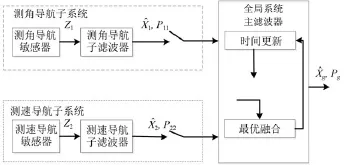
图11 天文测角测速组合导航系统Fig.11 Celestial integrated navigation system based on angle and velocity measurement
3)测速导航仪
(1)太阳空间外差光谱测速仪
针对太阳这样的亮目标源,可采用非对称式空间外差光谱仪方案,称之为太阳空间外差光谱测速仪。空间外差干涉系统中对称式结构因无法提供足够大的程差而难以实现速度测量,而非对称式结构则在其中一臂引入额外光程差,以提高测量精度,即形成非对称式空间外差光谱仪(DASH),其基本原理为对单根或多根谱线进行干涉得到干涉条纹,通过测量干涉条纹的相位变化计算速度变化,理论测速精度为1 m/s数量级。太阳空间外差光谱测速仪基本结构如图12所示。
(2)恒星色散定差光谱测速仪
对于其它恒星目标源,亮度相对较弱且与太阳目标源相差甚远,需对上述方案进行改进,提出了适用于多通道干涉光谱测速仪方案,称之为恒星色散定差光谱测速仪,基本原理是在迈克尔逊干涉仪后再连接一个低等或中等分辨率色散光谱仪,可将这些叠加在一起的干涉条纹分离出来,形成色散的多段干涉条纹,理论测速精度为2 m/s数量级。该方法增大工作波段,提高了条纹对比度。恒星色散定差光谱测速仪基本结构如图13所示。

图13 恒星色散定差光谱测速仪Fig.13 Dispersed fixed-delay velocity measurement instrument
(3)空间原子鉴频测速仪
空间原子鉴频测速是一种全新的高精度光谱测量方法,该方法利用原子核共振吸收原理及法拉第旋光效应,从太阳光谱中准确鉴别出待测光谱线的频移值,从而解算出所对应的相对运动信息,为实现连续自主、实时高精度的天文导航提供保证。
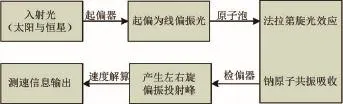
图14 原子鉴频测速基本原理Fig.14 Elementary principle of Atomic Filters
空间原子鉴频测速仪由三部分组成,如图15所示。
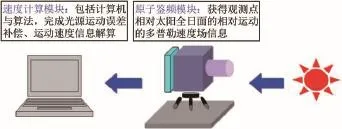
图15 空间原子鉴频测速仪Fig.15 Space atomic filters
①原子鉴频模块:获得观测点相对太阳全日面的相对运动的多普勒速度信息;
②系统平台:跟踪太阳运动,支撑、驱动原子鉴频前端始终对准太阳,同时通过隔振平台隔离环境振动影响,提高测量精度;
③速度计算模块:包括计算机与算法,完成光源运动误差补偿、运动速度信息解算。
室内激光测试结果表明,空间原子鉴频测速仪精度优于1 m/s,能够满足测速导航系统的需要。目前正在开展外场测试与数据分析过程中。
3.2关注方向
随着航天技术的快速发展,对航天器的导航要求越来越高。天文导航以其连续性好、自主性强、实时性优、导航精度高等特点,受到越来越多的关注和重视。未来天文导航还可在以下方面深入研究。
· 高精度动力学模型
· 新型测量原理与方法
· 先进导航滤波理论及方法
· 高可靠天文组合导航方法
1)高精度动力学模型
当前轨道动力学建模通常采用简化模型,具有计算简单、导航滤波速度快等优点。高精度动力学建模精度高,但模型复杂、计算量大、实时性受限。未来航天将会进行星座组网、交会对接、行星捕获、行星大气进入、下降与着陆、小行星采样等更复杂任务。如何针对这些不同任务的不同运动规律和需求建立相应的动力学模型,既满足导航精度要求,同时兼顾导航的精度与实时性,是值得进一步研究的问题。
2)新型量测原理与方法
传统天文导航方法通常以可见光作为观测谱段、以恒星、行星为导航目标源、以天体视线方向或夹角为量测信息,新型天文导航可采用紫外、红外、多光谱、X射线等敏感器,导航目标源可扩展至脉冲星、黑洞和宇宙微波背景辐射等,量测信息可为视向速度、距离、脉冲到达时间等,是未来天文导航重要的研究方向,如表 7所示。

表7 传统与新型天文导航方法的对比Table 7 The comparison of classical and new celestial navigation method
3)先进导航滤波理论及方法
天文导航系统为非线性系统,系统噪声和量测噪声的分布通常为非高斯分布,需采用先进的非线性滤波方法。目前先进的滤波方法和估计理论层出不穷,如模糊理论、多模型理论、神经网络理论等。探索适用于航天器自主天文导航系统的滤波新方法,并对其可观测性、稳定性、收敛性等性能进行理论分析是天文导航的重要研究内容。
4)高可靠天文组合导航方法
将不同的导航方法相结合,可实现各种导航方法之间的优势互补,使组合导航系统性能优于各子系统,如天文测角与天文测速组合、天文测角与天文测距组合、天文测速与天文测距组合、天文导航与星间测距组合、天文导航与无线电导航组合等。利用信息融合技术进行组合导航是未来航天器提高系统故障检测和隔离能力的重要途径,有待进一步深入研究。
4 结 论
天文导航是未来航天器导航的重要研究方向。本文结合近地、深空任务特点,首先阐述了国内外天文导航方法与应用现状;随后对天文导航在航天工程应用中理论问题与技术问题进行了归纳与总结,并重点分析了天文导航当前研究进展与未来关注方向。
从天文导航的发展历程可见,随着导航模型、滤波估计算法、导航观测仪器和量测信息处理的不断发展,天文导航技术已逐渐成为航天器自主导航的有效手段。近年来,天文测速导航等新理论、新方法的发展为天文导航带来了新的跨越,为解决导航连续自主、实时高精度的问题提供了有效途径。相信通过专家学者的不懈努力,定将为我国天文导航理论与技术的发展做出新的积极贡献。
[1]房建成,宁晓琳,田玉龙. 航天器自主天文导航原理与方法[M]. 北京:国防工业出版社,2016. Fang J C,Ning X L,Tian Y L. Principle and method of autonomous celestial navigation for spacecraft[M]. Beijing:National Defense Industry Press,2016.
[2]Yim J R,Crassidis J L,Junkins J L. Autonomous orbit navigation of interplanetary spacecraft[C]//AIAA/AAS Astrodynamics Specialist Conference. Reston,VA:AIAA Paper,2000:53-61.
[3]Ning X L,Fang J C. An autonomous celestial navigation method for LEO satellite based on unscented Kalman filter and information fusion[J]. Aerospace Science and Technology 2007,11(2-3):222-228.
[4]Emadzadeh A A,Speyer J L. Navigation in space by X-ray pulsars[M]. Springer,2011.
[5]帅平,李明,陈绍龙,等. X射线脉冲星导航系统原理与方法[M].北京:中国宇航出版社,2009. Shuai P,Li M,Chen S L,et al. Principle and method of X-ray pulsar navigation system[M]. Beijing:China Astronautic Publishing House,2009.
[6]张伟,陈晓,尤伟,等. 光谱红移自主导航新方法[J]. 上海航天,2013,30(2):32-33. Zhang W,Chen X,You W,et al. New autonomous navigation method based on redshift[J]. Aerospace Shanghai,2013,30(2):32-33.
[7]漆贯荣. 时间科学基础[M]. 北京:高等教育出版社,2006:75-80.Qi G R. Fundamentals of time science[M]. Beijing:Higher Education Press,2006:75-80.
[8]房建成,宁晓琳. 深空探测器的自主天文导航方法[M]. 西安:西北工业大学出版社,2010. Fang J C,Ning X L. Autonomous celestial navigation method for deep space probe[M]. Xi'an:Northwestern Polytechnical University Press,2010.
[9]刘林,侯锡云. 深空探测器轨道力学[M]. 北京:电子工业出版社,2012. Liu L,Hou X Y. Orbital mechanics of deep space probe[M]. Beijing:Publishing House of Electronics Industry,2012.
[10]李俊峰,宝音贺西. 深空探测中的动力学与控制[J].力学与实践,2007,29(4):1-8. Li J F,Baoyin H X. Dynamics and control in deep space exploration[J]. Mechanics in Engineering,2007,29(4):1-8.
[11]崔平远,乔栋. 小天体附近轨道动力学与控制研究现状与展望[J].力学进展,2013,43(5):526-539. Cui P Y,Qiao D. State-of-the-art and prospects for orbital dynamics and control near small celestial bodies[J]. Advances in Mechanics,2013,43(5):526-539.
[12]于洋,宝音贺西.小天体附近轨道动力学研究综述[J]. 深空探测学报,2014,1(2):93-104. Yu Y,Baoyin H X. Review of orbital dynamics in the vicinity of solar system small celestial bodies[J]. Journal of Deep Space Exploration,2014,1(2):93-104.
[13]黄翔宇,崔平远,崔祜涛. 深空自主导航系统的可观性分析[J]. 宇航学报,2006,27(3):332-337. Huang X Y,Cui P Y,Cui H T. Autonomous optical navigation for cislunar spacecraft based on Earth-Moon information[J]. Journal of Asstronautics,2006,27(3):332-337.
[14]崔平远,常晓华,崔祜涛. 基于可观测性分析的深空自主导航方法研究[J]. 宇航学报,2011,32(10):2115-2124. Cui P Y,Chang X H,Cui H T. Research on observability analysisbased autonomous navigation method for deep space[J]. Journal of Asstronautics,2011,32(10):2115-2124.
[15]Hermann R,Krener A J. Nonlinear controllability and observability[J]. IEEE Trans Autom Control,1977,AC-22(5):728-740.
[16]Lee E B,Markus L. Foundations of optimal control theory [M]. New York:Wiley,1967:27-39.
[17]秦永元,张洪钺,汪叔华. 卡尔曼滤波与组合导航原理[M]. 西安:西北工业大学出版社,2012. Qin Y Y,Zhang H Y,Wang S H. Calman filter and the principle of integrated navigation[M]. Xi'an:Northwestern Polytechnical University Press,2012.
[18]Julier S J,Uhlmann J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE,2004,92(3):401-422.
[19]Julier S J,Uhlmann J K. Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]//Proceedings of the American Control Conference. Anchorage,AK:[s. n.],2002.
[20]Myers K A,Tapley B D. Adaptive sequential estimation with unknown noise statistics[J]. IEEE Transactions on Automatic Control,1976,21(4):520-523.
[21]Julier S J. The spherical simplex unscented transformation[C]// Proceedings of the American Control Conference. Denver,Colorado:[s. n.],2003.
[22]Sage A P,Husa G W. Adaptive filtering with unknown prior statistics[C]//The 10th Joint American Control Conference.Boulder,Colorado:[s. n.],1969:769-774.
[23]Harlander J,Reynolds R J,Roesler F L. Spatial heterodyne spectroscopy for the exploration of diffuse interstellar emission lines at far-ultraviolet wavelengths[J]. The Astrophysical Journal,1992,396(2):730-740.
[24]Englert C R,Babcock D D,Harlander J M. Doppler asymmetric spatial heterodyne spectroscopy(DASH):concept and experimental demonstration[J]. Applied Optics,2007,46(29):7297-7307.
通信地址:上海市闵行区元江路3666号(201109)
电话:(021)24230001
E-mail:wzhang509@126.com
Research on Problems of Celestial Navigation in Space Engineering
ZHANG Wei1,2,ZHANG Heng1,2
(1. Shanghai Institute of Satellite Engineering,Shanghai 201109,China;2. Shanghai Key Laboratory of Deep Space Exploration Technology,Shanghai 201109,China)
As one of the core technologies of spacecraft,navigation is critical to guarantee the success of space missions. Celestial navigation has gradually become an effective method for spacecraft,which has the advantage of continuity,autonomy,real-time,and high-precision. Based on the theory and application of celestial navigation at present,combined with specifications of near-Earth satellites and deep space probes,the theoretical and technical problems in space engineering are discussed,for example,that of accurate modeling of navigation source,that of perception and detection of high accuracy,etc. Perspective and development direction of new celestial navigation technology in future are proposed,which provides an effective way to realize celestial navigation of continuity,autonomy,real-time,and high-precision in space engineering,and valid reference to research on theory and technology of celestial navigation in depth for academia and engineering.
celestial navigation based on velocity measurement;integrated navigation;celestial navigation instrument based on velocity measurement
P128.4
A
2095-7777(2016)03-0204-10
10.15982/j.issn.2095-7777.2016.03.002
张伟(1971- ),男,博士,主要研究方向:航天器导航、制导与控制技术。
[责任编辑:宋宏]
2016-05-26;
2016-06-19
国家重点基础研究发展计划(2014CB744200)
猜你喜欢
国际太空(2022年7期)2022-08-16
小学阅读指南·低年级版(2021年5期)2021-05-28
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
北京航空航天大学学报(2017年9期)2017-12-18
广东第二课堂·小学(2017年2期)2017-02-20
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10