基于测速测角敏感器的火星探测器自主导航方法研究
2016-10-20 03:40:51刘瑞霞张剑桥
深空探测学报 2016年3期
刘瑞霞,张剑桥
(哈尔滨工业大学 卫星技术研究所,哈尔滨 150001)
基于测速测角敏感器的火星探测器自主导航方法研究
刘瑞霞,张剑桥
(哈尔滨工业大学卫星技术研究所,哈尔滨 150001)
提出了一种基于天体光谱红移测速和利用星光敏感器测角的测速测角组合导航新方法。该方法与现在的深空探测器导航方法相比,优势明显:一是无需太复杂的轨道动力学模型,简单易行。二是不需要依赖地面的无线电信息,无时延。最重要的是消除了测角导航方法引入的微分误差和测速导航方法引入的积分误差,可以实现精确天文自主导航,满足深空导航连续自主、实时高精度的基础要求。针对该导航方法,首先完成了轨道动力学模型和量测模型的建立工作,然后根据模型的非线性特点,分别采用扩展卡尔曼滤波算法完成了对该组合自主导航方法的研究。最后,对该方法进行仿真验证,通过对仿真结果的分析可以发现,测速测角组合自主导航方法满足巡航段的导航精度指标要求。
测速测角;联邦滤波;深空探测
引用格式:刘瑞霞,张剑桥. 基于测速测角敏感器的火星探测器自主导航方法研究[J]. 深空探测学报,2016,3(3):219-224.
Reference format: Liu R X,Zhang J Q. Research on autonomous navigation algorithms for the mars probe via speed and angle measurement sensors[J]. Journal of Deep Space Exploration,2016,3(3):219-224.
0 引 言
人类从未停止对宇宙的探索,随着航天技术的不断发展,走出地球,进入太空开展对其他天体的研究已经成为人类航天活动的重要方向。进入21世纪以来,深空探测走向了一个新的发展领域。美国、欧盟、俄罗斯、日本、印度和中国都已经制定了紧密的、长期的深空探测发展计划。在2005年,美国正式提出了“空间探索计划”,明确规定了2006~2016年的目标以及2016年以后的发展方向。同时,2007年8月,俄罗斯公布了针对2006~2040年的远期航天事业发展规划,也将深空探测列入了发展规划之中[1-5]。在国外大力发展深空探测工程之际,我国在深空探测领域的“嫦娥”工程也得到了良好的发展并且取得了丰硕的成果。
由于地面测控有时延,所以难以保证探测器导航的实时性,而且地面站资源有限,会给测控带来负担,同时也增加了成本。而对于GPS导航来说,导航精度受探测器与地面距离影响[6-7],离地面越远精度越低。为了克服这些深空探测领域的问题,人类对于自主导航技术也越来越关注。而完成深空探测器的有效实时自主导航,可以保证探测器定轨的实时性,有利于提高其在轨的生存能力[8-10]。所以自主导航是否能实现,对于深空探测任务的成败至关重要。
本文提出了一种基于天体光谱红移测速和利用星光敏感器测角的测速测角组合自主导航新方法,在该方法中光源和信息源分别为太阳系天体和恒星,通过它们直接获取位置、速度的量测信息。此方法消除了测角导航方法求速度时引入的微分误差和测速导航方法求位置时引入的积分误差,可以实现精确天文自主导航,满足深空导航连续自主、实时高精度的基础要求,为其他星体的深空探测提供了良好的技术参考依据以及理论基础,并且对于近地卫星的自主导航也具有参考价值。
1 轨道动力学模型建立
在火星探测过程中,巡航段轨道即为火星探测器离开地球影响球之后直接进入日心轨道的阶段。此时太阳为中心引力天体,太阳光压摄动、大天体引力摄动和探测器推力等为其主要摄动力项,而月球摄动项主要是在距离地球较近时需要考虑的摄动项[11-12]。针对巡航段建立火星探测器的轨道动力学方程,其坐标系为日心黄道惯性坐标系,具体方程形式为
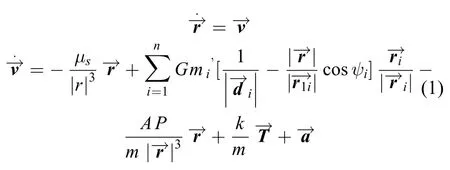
其中:在日心黄道坐标系下火星探测器的速度矢量和位置矢量分别是;第i个摄动天体与探测器连接的位置矢量为;第i个运动天体在日心黄道坐标下的位置矢量为;太阳引力常数;G为万有引力常数;m'i为第i个摄动行星的质量;n为摄动行星的个数。为燃料泄露带来的加速度、与中心天体有关的摄动的加速度以及喷气推力的未知加速度等其他各种的加速度矢量;P为太阳光压力系数;k是探测器推力系数;T为探测器推力矢量;m为火星探测器的质量;A为火星探测器截面面积。
2 量测模型建立
测角敏感器是卫星上常备的一种导航敏感器件,近年来随着测速导航这种新型导航方式的提出,测速敏感器也被用于安装在卫星上作为一种新型的敏感器,这两种敏感器及其构成的自主导航方式在精度、可靠性、使用方面各有优缺点。因此,测量模型建立在这2种导航方式的基础上。通过文献[13-14]可知,这两种信息是可观测的。
2.1测角导航量测模型
在本文的自主组合导航系统中测得的信息为探测器与导航星的星间夹角信息和探测器速度信息,然后根据这些信息得到探测器的位置信息实现探测器的自主导航。
在巡航段时,由于探测器距离火星位置相对比较远,不方便直接以火星作为天文导航中的导航星进行量测,所以选用小行星1号[15-16]、恒星1号、恒星2号、恒星3号作为导航星,在J2000日心黄道惯性坐标系中小行星1号的位置矢量为(x1y1z1),火星探测器位置矢量为(xyz),图1给出导航星与火星探测器之间的几何位置关系。
角度的量测方程为
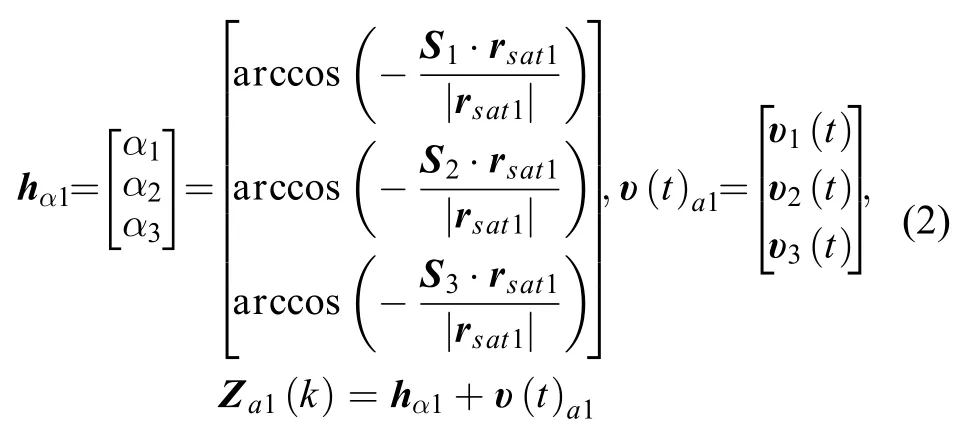
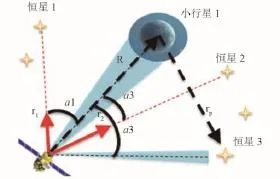
图1 角度量测模型Fig.1 Angular measurement model
2.2测速导航量测模型
火星探测器在飞行中可以探索测量到多个天体的光源信号,包括木星、太阳、地球等。由多普勒效应原理可知:不仅天体发出的光谱频率与探测器接收到的频率不同,而且该频率随着火星探测器相对天体的运动状态变化而变化。根据以上原理可知,火星探测器与天体的相对运动速度可以通过测量光谱频率的红移间接得到。火星探测器在惯性空间中的速度矢量可以通过观察测量以及综合多于3个的不共线天体的运行星历信息等来确定。其模型如图2所示。
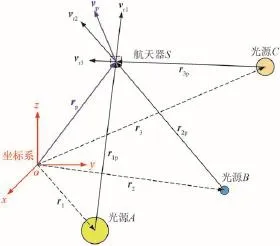
图2 测速观测模型Fig.2 Velocity measurement model
探测器在巡航段时,导航星为恒星1号、恒星2号、恒星3号;观测星为小行星1号;基于天体几何的关系,测得的火星探测器在巡航段相对各天体运动的径向速率vr1,vr2,vr3满足[1]

3 组合导航系统
考虑到导航系统的非线性以及器载计算机的计算能力有限,本文采用联邦扩展Kalman(Extended Kalman Filter,EKF)滤波器[17-20]作为导航滤波器。EKF能较好处理非线性问题,且计算量较小,联邦滤波器能够很好的实现信息融合。
联邦滤波器结构图如图3所示。
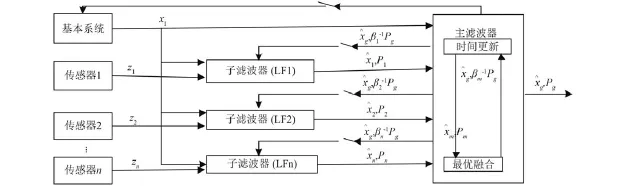
图3 联邦滤波器结构图Fig.3 Federal filter structure
设基本系统的状态方程为


设有n个传感器对整个系统独立地进行测量,并且n个子滤波器均可根据各自的测量信息独立地进行滤波计算。设第i个子滤波器的测量方程为

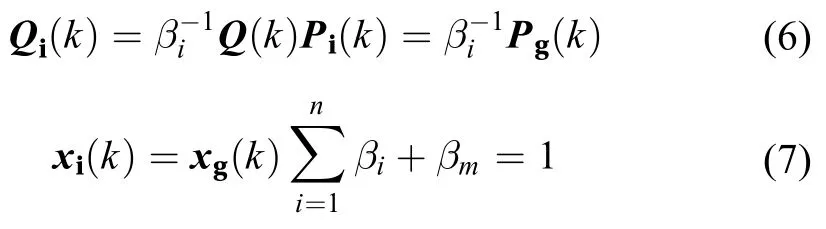
联邦Kalman滤波器的数学模型可以用以下公式来表示。
信息分配:
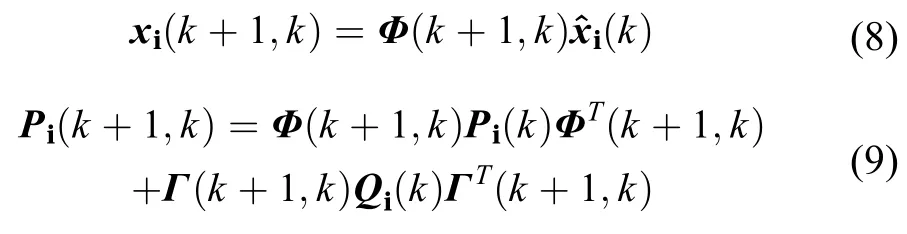
时间更新:
量测更新:
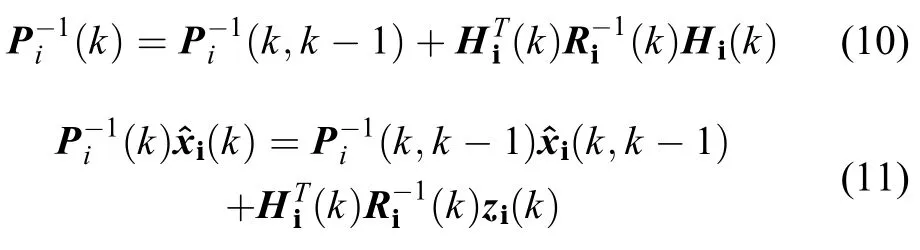
信息融合:
采用信息分配原则的联邦滤波虽然各子滤波器的估计值是次优的,但是融合后的主滤波器的估计值却是最优的。
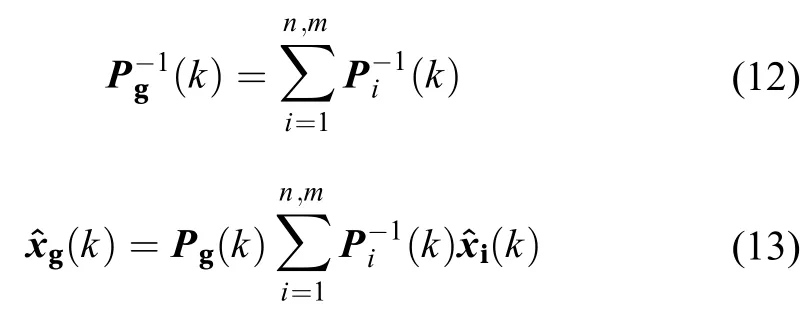
根据本自主导航系统,设计基于信息融合的联邦EKF滤波算法如图4所示。
由图4可知,以下3部分构成了自主导航系统分别为:局部系统1、局部系统2以及全局系统。其中,局部系统1包括:局部滤波器1、火星探测器轨道动力学模型、测角导航敏感器;局部系统2包括:局部滤波器2、火星探测器轨道动力学模型、测速导航敏感器;全局系统包括:全局滤波器,对两个局部系统输出的状态估计值进行数据融合。
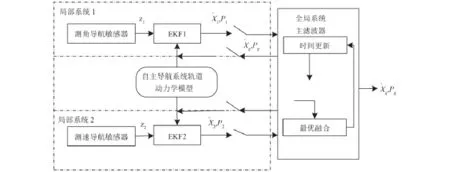
图4 联邦EKF组合自主导航系统Fig.4 Federal EKF integrated independence navigation system
在联邦EKF组合自主导航系统中,局部滤波器1和局部滤波器2,均采用EKF滤波算法独立地对量测信息和时间信息进行更新,量测信息在子系统内并行处理。主滤波器采用有重置式对各个子滤波器输出的公共信息进行数据融合,从而获取高精度的火星探测器自主导航信息。系统结构如图3所示,分别为测角敏感器和测速敏感器的测量值;分别为2个子滤波器输出的状态估计值;分别为2个子滤波器的协方差阵;为联邦主滤波器的最优估计值和协方差阵。
4 仿真验证
为了验证上述导航方法的有效性并且满足导航的精度指标要求,仿真所使用探测器真实轨道数据由STK(Satellite Tool Kit)软件产生,在巡航段为了简化研究,选取固定的3颗恒星和小行星,其中选取的3颗恒星为天狼星、南门二和大角星。火星探测器选为美国火星探路者号其参数如表1所示。

表1 探测器轨道参数Table 1 Orbit parameters of mars probe
1)选取仿真时间为:1997年3月28日00:00:00.000—1997年4月4日00:00:00.000。
2)量测仪器的精度:测角感器精度为3′;测速敏感器精度为3 m/s;
初始误差为

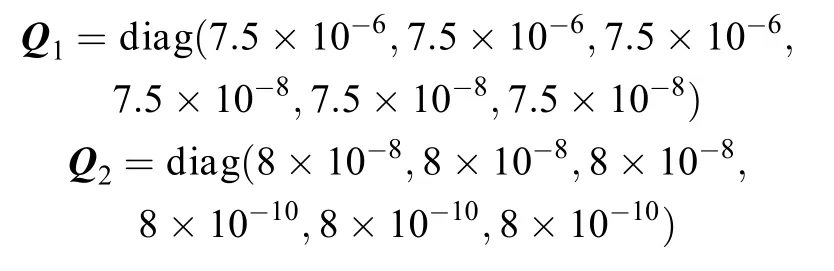
系统噪声矩阵为
观测噪声矩阵为

3)子滤波器滤波周期为30秒,主滤波器针对每八组子滤波器数据进行融合一次。
图5和图6分别为位置误差和速度误差,由图5和图6可以看出位置误差在一段时间后收敛,稳定在180 km以下,速度误差在2 m/s左右,满足实际巡航段对位置精度和速度精度的要求。
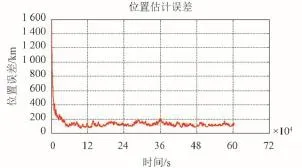
图5 位置误差Fig.5 Position error
5 结 论
对于火星探测巡航段,本文提出了一种基于测角敏感器和测速敏感器的的深空探测器自主导航方法。在该方法中,考虑到状态方程和观测模型的非线性,设计了基于扩维Kalman滤波器的联邦滤波算法,实现了这2种导航方式的信息融合。
该组合导航方法具有以下优点:1)传统的天文导航方法利用天体角度信息进行滤波,但角度测量的微小误差就会引起较大的位置误差,而且在求解速度时由于微分还会引入误差,而采用组合导航利用速度子滤波器可以有效修正这一误差;2)在可观测性上,当探测器距离目标天体较远时,角度测量不易观测,本课题在巡航段以小行星为参照,可以有效解决这一问题。该自主导航方式能够针对火星探测器初始位置误差较大的情况,完成探测器的自主导航并且位置误差保证控制在180 km之内,因此可以证明该组合导航方式能够满足火星探测器在实际工程中的导航需求。
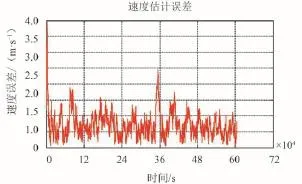
图6 速度误差Fig.6 Velocity error
[1]张伟,陈晓,尤伟. 光谱红移自主导航新方法[J]. 上海航天,2013(2):32-33. Zhang W,Chen X,You W. New autonomous navigation method based on redshif[J]. Aerospace Shanghai,2013(2):32-33.
[2]李俊峰,崔文,宝音贺西. 深空探测自主导航技术综述[J]. 力学与实践,2012,34(2):1-9. Li J F,Cui W,Baoyin H X. A survey of autonomous navigation for deep space exploration[J]. Mechanics in Engineering,2012,34(2):1-9.
[3]Elachi C. The Critical role of communications and navigation technologies to the success of space science enterprise missions[C]//Keynote Address Descanso International Symposium.America:[s. n.]:1999.
[4]Riedel J E,Bhaskaran S,Desai S,et al. Autonomous optical navigation(AutoNav)DS 1 technology validation report[J]. Deep Space 1 technology validation reports(A 01-26126 06-12),Pasadena,CA,Jet Propulsion Laboratory(JPL Publication 00-10),2000.
[5]Sheikh S I,Hanson J E,Collins J,et al. Deep space navigation augmentation using variable celestial x-ray sources[C]//Proc. ION 2009 International Technical Meeting. 2009:34-38.
[6]宋福香,左文辑. 近地卫星的GPS自主定轨算法研究[J]. 空间科学学报,2000,20(1):40-47. Song F X,Zuo W J. Algorithm study on autonomous orbit determination for low Earth orbit microsatellites using GPS[J]. Chinese Journal of Space Science,2000,20(1):40-47.
[7]王卫华. 非线性滤波技术及其在深空探测自主导航中的应用[D]. 哈尔滨:哈尔滨工业大学,2012. Wang W H. Nonlinear filtering technology and its application in the deep space exploration autonomous navigation[D]. Harbin:Harbin Institute of Technology,2012.
[8]宁晓琳,吴伟仁,房建成. 深空探测器自主天文导航技术综述 (上)[J]. 中国航天,2010,(6):37-40. Ning X L,Wu W R,Fang J C. Survey of autonomous celestial navigation technology for deep space probe(I)[J]. Aerospace China,2010,(6):37-40.
[9]Konopliv A S,Yoder C F,Standish E M,et al. A global solution for the Mars static and seasonal gravity,Mars orientation,phobos and deimos masses,and Mars ephemeris[J]. Icarus,2006,182(1):23-50.
[10]袁健. 深空探测器自主光学导航方案及非线性滤波算法研究[D]. 青岛:青岛科技大学,2007. Yuan J. Autonomous optical navigation schemes and nonlinear filter algorithems[D]. Qingdao:Qingdao University of Science & Technology,2007.
[11]刘林. 航天器轨道理论[M]. 北京:国防工业出版社,2000. Liu L. Spacecraft orbit theory[M]. Beijing:National Defense Industry Press,2000.
[12]季江徽,刘林,张伟.第三体摄动分析解的一种表达式[J]. 天文学报,2000,41(1):79-92. Ji J H,Liu L,Zhang W. An expression of the third body perturbation analytic solutions[J]. Acta Astronomica Sinica,2000,41(1):79-92.
[13]Tang Y,Wu Y,Wu M,et al. INS/GPS integration:Global observability analysis[J]. IEEE Transactions on Vehicular Technology,2009,58(3):1129-1142.
[14]宁晓琳,房建成. 一种深空探测器自主天文导航新方法及其可观测性分析[J]. 空间科学学报,2005,25(4):286-292. Ning X L,Fang J C. A new autonomous celestial navigation method for deep space probe and its observability analysis[J]. Chin. J. Space Sci.,2005,25(4):286-292.
[15]常晓华. 深空自主导航方法研究及在小天体探测中的应用[D]. 哈尔滨:哈尔滨工业大学, 2010. Chang X H. Research on deep space autonomous navigation scheme and application to small celestial bodies exploration[J]. Harbin:Harbin Institute of Technology,2010.
[16]童傅. 行星运动的后牛顿效应[J]. 科学通报,1984(1):34-36. Tong F. Post Newton effect of planetary motion[J]. Chinese Science Bulletin,1984(1):34-36.
[17]付梦印,邓志红,张继伟. Kalman滤波理论及其在导航系统中的应用[M]. 北京:科学出版社,2003. Fu M Y,Deng Z H,Zhang J W. Kalman filtering theory and its application in navigation system[M]. Beijing:Science Press Ltd.,2003.
[18]李旦,秦永元,梅春波. 组合导航自适应卡尔曼滤波改进算法研究[J]. 测控技术,2011,30(3):114-116.Li D,Qin Y Y,Mei C B. An improved adaptive Kalman filter algorithm for SINS/GPS integrated navigation system[J]. Measurement & Control Technology,2011,30(3):114-116.
[19]赵玉晖. 深空探测中的轨道设计和轨道力学[J]. 天文学报,2013,54(3):302-304. Zhao Y H. Trajectory design and orbital dynamics of deep space exploration[J]. ACTA Astronomica Sinica,2013,54(3):302-304.
[20]刘劲,房建成,宁晓琳,等. 基于脉冲星和火星观测的深空探测器自主导航[J]. 仪器仪表学报,2014,35(2):247-252. Liu J,Fang J C,Ning X L,et al.Autonomous navigation for deep space explorer based on pulsar and Mars observation[J]. Chinese Journal of Scientific Instrument,2014,35(2):247-252.
通信地址:哈尔滨工业大学科学园B3栋卫星技术研究所
电话:(0451)86402357-8514
E-mail:lrx_19870604@163.com
Research on Autonomous Navigation Algorithms for the Mars Probe via Speed and Angle Measurement Sensors
LIU Ruixia,ZHANG Jianqiao
(Research Center of Satellite Technology,Harbin Institute of Technology,Harbin 150001,China)
In this paper a new navigation method is proposed, which is based on using red shift to measure speed and using star sensor to measure angle. Compared with the existing autonomous navigation methods, this method does not rely on radio message and complicated orbital dynamics model. It has the advantage of highly independent, easy to implement and without time delay. By using this method, the differential error caused by measuring angle method and the integral error caused by measuring speed method can be eliminated, then make precise astronomical autonomous navigation come true to meet the basis of deep space requirements for autonomous navigation, real-time and high precision. Firstly, the orbit dynamics model and the measurement model are established. Secondly, due to the nonlinear characteristics of the model, EKF is used to complete the autonomous navigation for Mars probe. Finally, a numerical example is established to illustrate the effectiveness of the proposed control approach and by analyzing, it can find that this method satisfies the requirement of navigation precision of cruise phase.
velocity and angular measurement;federal filter;deep space exploration
V249.32+3
A
2095-7777(2016)03-0219-6
10.15982/j.issn.2095-7777.2016.03.004
刘瑞霞(1987- ),女,博士研究生,主要研究方向:航天器自主导航,卫星编队控制。
[责任编辑:高莎]
2016-05-26;
2016-06-29
国家重点基础研究发展计划(2014CB744205)
猜你喜欢
海外文摘(2021年7期)2021-08-31 21:33:44
太空探索(2020年10期)2020-10-22 03:59:40
大科技·百科新说(2020年10期)2020-03-01 05:25:19
百科探秘·航空航天(2019年4期)2019-06-11 05:43:07
百科探秘·航空航天(2019年5期)2019-06-06 01:38:54
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
测绘科学与工程(2016年6期)2016-04-17 06:51:25
发明与创新(2015年30期)2015-02-27 10:39:57
雷达学报(2014年4期)2014-04-23 07:43:19