一种行星安全着陆点综合评估方法
2017-01-18 06:15崔平远葛丹桐
深空探测学报 2016年4期
崔平远,葛丹桐
(1.深空自主导航与控制工信部重点实验室,北京 100081;2.北京理工大学 深空探测技术研究所,北京 100081)
一种行星安全着陆点综合评估方法
崔平远1,2,葛丹桐1,2
(1.深空自主导航与控制工信部重点实验室,北京 100081;2.北京理工大学 深空探测技术研究所,北京 100081)
随着精确着陆技术的发展,探测器在行星表面可到达的地区形貌状况越来越复杂。为了保障着陆的安全性,在下降过程中探测器需要结合敏感器信息对视野范围内的着陆区形貌进行评估分析,从而选取出最适宜着陆的地区。针对这一问题,本文提出一种行星安全着陆点选取思路,并设计出着陆点选取的参考指标,通过对形貌以及燃耗的评估,实时选取安全着陆点。MATLAB仿真结果表明,针对快速选取过程和遍历选取过程,该方法均能够在两种过程中有效选取出满足要求的着陆点,从而提高了任务的成功率与安全性。
行星形貌;燃耗;着陆点选取;安全着陆;评估方法
0 引 言
未来行星着陆任务要求探测器安全精确着陆在更为复杂的行星表面,这不仅对导航制导控制系统提出了极大的挑战,也对着陆区提出了更高的要求。由于地面获取的行星表面信息精度有限,较小尺寸的障碍往往在距离表面较近时才能被检测到,并且在着陆过程中着陆器的实际状态可能与预定状态产生较大的偏离[1],从而导致着陆器无法到达预定着陆点或者预定着陆点周围地形复杂不利于着陆等情况的发生。为了解决这一问题,需要在下降过程中实时在线选取着陆点,使得探测器在远离对其构成威胁障碍物的同时,利用有限的燃料安全平稳地着陆在行星表面。
着陆点选取是每个行星着陆任务都需要面临的重要难题。在任务规划阶段,需要根据已有的形貌、光照、通信等情况对着陆区进行粗选取;当探测器接近目标天体后,可以获知更为精确的形貌信息,此时需要对着陆区进行进一步的精选取。目前,有关安全着陆的研究主要集中于针对诸如岩石、斜坡、弹坑等地形障碍的检测与规避[2-3],最终选择出来适宜着陆的区域大多平坦且远离障碍物。然而为了实现安全着陆,仅仅考虑地形安全性是不够的。对于不同的目标天体,着陆点选取过程中侧重的因素也稍有不同。例如,以火星为代表的主要天体引力大且分布相对均匀,着陆过程相对更加快速,加上与地球通讯的时延问题,目前只能依靠星上自主系统对有限范围内的着陆区域进行快速的评估[4],因此要求着陆点选择算法简单快捷;与之不同的是,小行星与彗星尺寸更小、形状不规则,产生的引力小且分布不均,着陆在这类天体上通常要经历更长的时间,因此探测器有充足的时间对行星表面进行分析,从而选取出适宜着陆的安全区域。为了完善统一行星着陆区的评估方法,需要提出一种综合考虑多方因素的指标来适应不同任务,从而当着陆对象改变时,仍能较好完成着陆区的选取评估工作,有效选取出最佳着陆点。
本文通过提出一种考虑多种因素的行星安全着陆点综合评估方法,使探测器能够有效避开危险区域,以较少的燃耗顺利降落在安全的地区。与此同时,为了适应不同任务特点给出了两种选取策略,即快速选取过程和遍历选取过程,并通过仿真验证了每种选取策略的有效性。整个评估过程可以描述为:在下降过程中,星载计算机根据敏感器获取的形貌数据进行计算与判断,综合燃耗估计,选取最安全的着陆点,再通过制导控制系统实时生成着陆轨迹,将着陆器转移至更新后的目标着陆点,保证整个着陆任务的顺利完成[5],从而提高行星着陆任务的安全性与可靠性,为未来行星着陆任务提供技术支持和参考。
1 考虑因素
一般来说,影响着陆点选取的因素可分为工程约束与科学价值两大类[6]。考虑到在下降过程中探测器的转移范围以及相机视野范围有限,本文中待评估区域的科学价值视为基本一致,仅从安全角度出发,提出一种综合评估着陆点的方法。
为了保证探测器顺利降落在行星表面,需要首先对着陆过程中可能遇到的风险进行估计,这些风险包括地表起伏、岩石及陨石坑等障碍对探测器构成的威胁,携带的燃料不足使得探测器无法到达安全着陆点等等。此外,地表的光照情况、尘土厚度、热惯量情况等以及探测器自身的系统误差以及外界的环境干扰均会对着陆的安全性构成威胁[7]。在实际任务中,导致着陆失败的原因十分繁杂,以下主要针对地形安全性以及燃耗两方面对着陆安全性以及安全着陆点选择的影响进行详细的分析。
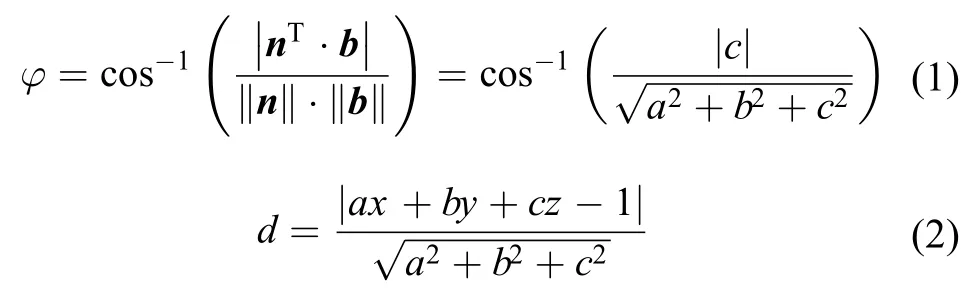
关于着陆安全性,首先需要考虑的是地形的安全性要求。地形的安全性要求主要包括着陆区内的障碍物尺寸必须在着陆器可容忍范围之内,以及着陆区必须足够大以满足着陆器的最大着陆偏差两个方面。随着探测器与天体表面的距离不断缩小,敏感器通过检测能够获取的地形特征也越来越具体。在选择适宜着陆的区域时,应尽可能远离陡坡和岩石密集的地区,这样的地区不仅对着陆的安全性提出挑战,同时还影响了后续科学操作的开展。在分析地形安全性时,主要考察的两个指标为坡度和表面粗糙度,其计算公式如下
因此在得到地形信息后,首先计算各点的局部坡度以及粗糙度大小,结合工程约束对可见范围内的障碍进行识别,将对着陆器构成威胁的区域所在的像素点标记为危险像素点,其余标记为安全像素点,并通过螺旋搜索法得到每个像素点的安全半径R[9]。由于安全半径指的是当前位置与最近障碍之间的距离,其很好地体现了待评估区域内每一点的安全程度,因此被选作表征地形安全性的指标。
在确保了地形安全后,还应考虑着陆器自身的机动能力,即燃耗限制。由于探测器搭载的有效载荷有限,对于深空探测任务来说,获取燃耗最优解显得尤为重要[10]。从安全角度出发,探测器在有限燃料范围内能够到达的地区都可以作为备选着陆点,但如果任务同时要求探测器储备一部分燃料用于紧急制动或转移,则下降段所消耗的燃料越少越好。整个动力下降段的燃耗用燃料质量比(propellant mass fraction,PMF)表征[1],当全部燃料都消耗完时PMF取到最大值

式中:m0为探测器初始质量;为质量流率;ai为时间段内的加速度;Isp为推力器比冲;ge为地球重力加速度。
燃耗约束可以通过寻找评估范围内PMF值最小的点或将评估范围缩小到探测器在有限燃料下可以到达的区域加入到安全着陆点的选取过程中,本文采用前者,并将PMF作为表征燃耗大小的指标。实际任务中燃料消耗的多少不仅取决于采用的制导律,还与探测器的初始状态以及着陆点位置紧密相关,下降过程中着陆轨迹越笔直PMF越小,轨迹越弯曲PMF越大。
2 着陆点选取方法
在确定着陆区评估内容后,需要建立相应数学模型,得到综合的着陆点选取指标,并根据指标的计算结果得到最适宜探测器着陆的地方。这里,假设着陆点选取指标取值越小,该区域就越安全。由于上节选出的三种因素取值各异,量纲不同,本文采用如下min-max归一化方法对其形式进行统一

这种归一化方式保留了原始数据的分布特征,得到的无量纲结果在[0,1]之间连续变化,因此经过变换的表达式可直接通过加权得到最后的着陆点选择指标。加权方式根据各项指标对任务成败的重要程度来决定,若认为所选指标对任务影响相近不分上下,可将各部分权重均设为相同值;若某一项或某几项指标对任务成败影响更大,则可通过加大其权重,增加该指标在分析结果中所占的分量。
为了体现每一项指标对着陆点选择的影响,结合工程实际,综合考虑地形安全性、燃耗以及着陆速度,得到如下着陆点选取指标(landing site selection index,LSSI):

在应用该方法到实际任务中时,还应根据探索的目标天体而进行相应的调整。如第一节所述,在小行星、火星及月球着陆任务中,由于天体本身的特性差异,在着陆点选择问题上处理方式稍有不同。小行星着陆过程由于距离更远、速度更小、历时更长而有充足的时间完成对地形的检测和着陆区安全性的评估工作,因此式(5)可直接应用于这一过程中,从而在一片较大的区域中选取出最适宜着陆的安全着陆点。与之不同的是,火星或月球着陆过程距离有限且速度大、时间短。以火星为例,探测器对表面地形障碍的检测开始于伞降段防热罩分离之后[11],由于时间紧迫,要实现对整个视野范围内的地区进行地形安全性和燃耗的综合评估难度较大,因此对于这类任务使用式(5)时需要适当调整策略。首先根据式(1)、(2)计算预定着陆点处是否安全,若安全,计算其安全半径及预计所需的燃耗,若均在可接受范围内,则不改变着陆点,探测器仍向着预定着陆点运动;若不安全,或者安全半径或燃耗二者其一不满足要求,则需要重新在原着陆点附近小范围内根据式(5)另选安全着陆点,具体的选取范围大小视实际星载计算机运算能力和敏感器识别能力而定。
因此,根据不同着陆过程的历时长短特点,在应用着陆点评估方式时形成了如上所述两种不同的安全着陆点选取策略——快速选取过程与遍历选取过程。快速选取过程旨在在原着陆点附近快速挑选出适宜着陆的地点,用最短的时间和很小的计算量得到理想的结果,适用于着陆时间较短或星载计算机计算效率较低的情况。而遍历选取过程则致力于在更大范围的地形中挑选出安全着陆点,因此探测器可能需要在下降过程中转移更远的距离,这种选取策略往往需要花费的时间以及占用的内存更大,适用于着陆时间充裕或星载计算机能够实现在线高效计算的情况。以下分别针对两种不同的选择策略进行仿真,对行星安全着陆点综合评估方法的实际应用进行进一步的说明。
3 应用实例
为了便于分析比较安全着陆点选取结果,本节结合“嫦娥3号”的着陆参数和月面地形对两种不同的着陆场景进行了仿真分析,所采用的仿真参数、地表模型如表1与图 1所示。在给定的400 m×400 m范围内分别应用第三节提出的着陆点选取指标对安全着陆点进行筛选,假定原始着陆点位于原点(0,0),得到仿真结果如下。
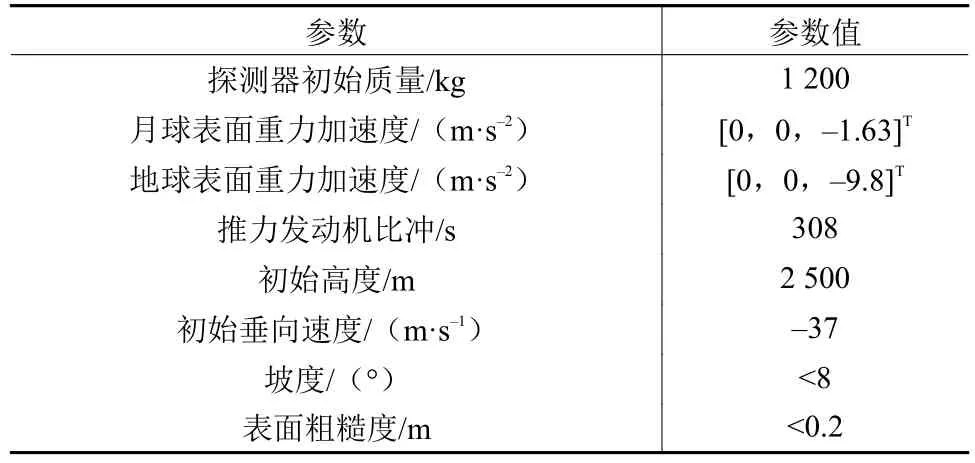
表1 仿真参数Table 1 Simulation parameters
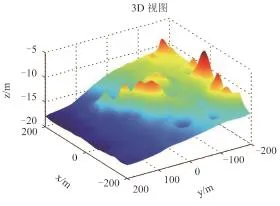
图1 仿真所用地形Fig.1 Simulated terrain model
3.1 快速选取过程策略
首先根据所建立的地表模型高程数据计算预定着陆点(0,0)附近的局部拟合平面,进而得到该点的坡度和表面粗糙度信息。根据计算结果,尽管预定着陆点处的坡度满足要求,但其表面粗糙度0.344 7 m超过了给定的工程约束0.2 m,因此被认定为危险,不适于探测器着陆,需要在其附近区域重新选取新的安全着陆点。
进而对其附近50 m×50 m范围内进行地形安全性评估,计算局部拟合平面,得到各像素点处的坡度和表面粗糙度,其中超过探测器容忍范围(参数见表1)的像素点被视为需要规避的障碍,将该点记为0,反之未超过约束范围的视为安全像素点,记为1,得到的障碍检测结果如图 2所示,黑色的部分表示安全区域,白色的部分表示危险区域。接着计算各点安全半径R的大小。危险像素点的安全半径全部设为0,针对每一个安全像素点,则需要遍历使用螺旋搜索法计算其安全半径大小,即与之最近危险像素点之间的距离,经过归一化后的安全半径计算结果如图 3所示,取值越小的地方,安全半径越大,该地区越安全。
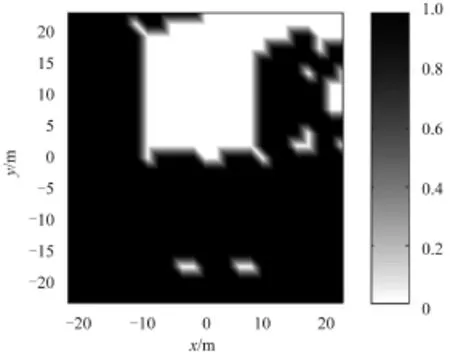
图2 障碍检测结果(安全=1;不安全=0)Fig.2 Hazard detection result(safe=1;unsafe=0)

图3 安全半径归一化计算结果Fig.3 Safe radius normalization result
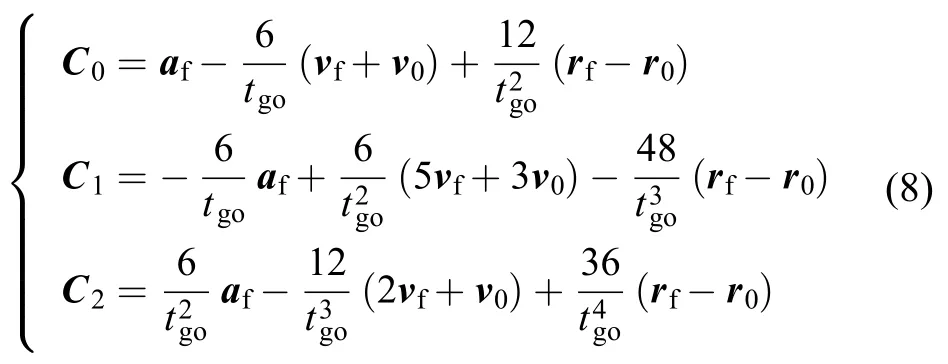
为了在着陆点的选择过程中加入燃耗,需要在以上得到结果的基础上继续计算着陆在不同地方所消耗的燃料。多项式制导[4]由于形式简单、计算快捷而广泛应用于已有的行星着陆任务中,该制导律假设3个方向的加速度是时间的二次函数

通过积分可进一步得到速度及位移关于时间的表达式。在下降段,探测器的初始及末端状态受到约束

将加速度、速度与位移的表达式代入以上方程组,联立解得
得到制导律表达式后,依次改变探测器末端位置向量,计算从同一初始状态出发所消耗的燃料大小。全局PMF值计算完毕后,结合得到的安全半径计算结果,根据式(9)对着陆区进行评估

此处采用了等权的分配方案,即τ1=0.5,τ2=0.5,得到的仿真图如图 4、5所示,其中图 4为燃耗PMF经过归一化处理后的结果,图 5为着陆点选取指标LSSI的计算结果,遍历搜索出全局最小值及其坐标见表2,该点即为当前指标选取出的最佳着陆点。
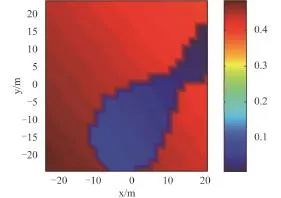
图4 燃耗归一化结果Fig.4 Fuel consumption normalization result
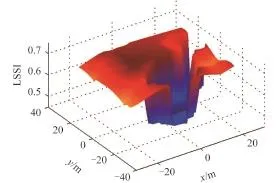
图5 LSSI计算结果Fig.5 LSSI computation result

表2 策略1着陆点选择结果Table 2 The result of selected landing site for method 1
图6标出了在50 m×50 m给定范围内得到的安全着陆点评估结果,其中位于中间黑色的点为原始着陆点位置,位于其右边绿色的点为同时考虑地形安全性及燃耗情况的选取结果。可以看到,快速选取策略能够在原着陆点被检测出危险的前提下,在其附近的局部有限范围内快速有效地选取出地形满足工程约束且消耗燃料较少的地点作为任务的新着陆点,从而提高了任务的安全性。
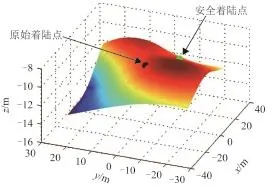
图6 着陆点选择结果与预定着陆点比较Fig.6 Comparison of the selected landing site and the original landing site
3.2 遍历选取过程策略
对于时间充足或搭载的星载计算机性能更优的着陆过程来说,就可对更大范围内的地形进行完整的安全性评估,因此着陆点选取的范围也更为广阔,所需的计算量更大,花费的时间也更多。此处针对整个给定的400 m×400 m范围进行着陆安全性分析。
首先根据所建立的地表模型高程数据计算局部拟合平面,进而得到各像素点的坡度和表面粗糙度信息,超过探测器容忍范围的记为0,未超过的记为1,得到的障碍检测结果如图 7所示。黑色的部分表示安全区域,白色的部分表示危险区域。接着计算各点安全半径R的大小。危险像素点的安全半径设为0,每一个安全像素点使用螺旋搜索法计算其安全半径大小,再将整个待估区域的安全半径进行归一化,计算结果如图 8所示。
在下降过程中同样采用3.1节中所述的多项式制导律,依次改变探测器末端位置向量,计算从同一初始状态出发所消耗的燃料大小,得到全局PMF,再根据式(10)对着陆区进行评估
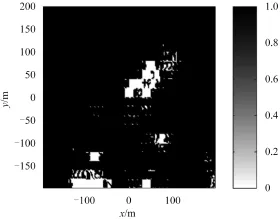
图7 障碍检测结果(安全=1;不安全=0)Fig.7 Hazard detection result(safe=1;unsafe=0)

图8 安全半径归一化计算结果Fig.8 Safe radius normalization result

此处采用的权重分配方案同样为τ1=0.5,τ2=0.5,得到的仿真图如图 9、10所示,其中图 9为燃耗PMF经过归一化处理后的结果,图 10为着陆点选取指标LSSI的计算结果,遍历搜索出全局最小值所在位置即为指标选取出的最佳着陆点。选取过程中采用的权重、着陆点处的指标值以及着陆点的三维位置坐标数据见表3,选出的着陆点与原着陆点之间的位置关系如图 11所示。
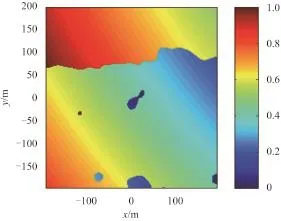
图9 燃耗归一化结果Fig.9 Fuel consumption normalization result

图10 LSSI计算结果Fig.10 LSSI computation result

表3 策略2着陆点选择结果Table 3 The result of selected landing site for method 2
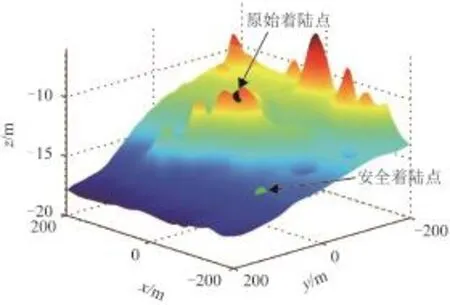
图11 着陆点选择结果与预定着陆点比较Fig.11 Comparison of the selected landing site and the original landing site
结合策略1和策略2的仿真结果,图 12给出了在整个400 m×400 m评估范围内两种选择策略得到的安全着陆点以及原着陆点的位置关系,其中位于中间黑色的点为原着陆点位置(0,0),位于其附近右侧蓝色的点为快速选取策略根据选取指标得到的结果,位于其左侧较远处绿色的点为遍历选取策略根据选取指标得到的结果。策略1得到的着陆点1距离原着陆点约15.6 m,策略2得到的着陆点2距离原着陆点135 m,后者虽然距离预定目标点更远,但从三维地形图上可以看出,着陆点2附近的地形情况远比原着陆点和着陆点1附近更加平坦,起伏少,坡度也更小,直观上看更适宜于着陆。同时,着陆点1处的选取指标取值为0.458 8,着陆点2处的选取指标取值为0.324 1,意味着不仅地形安全性更高,在给定的初始状态下消耗的燃料也更少。从安全性角度出发,是更适合探测器着陆的地方。虽然选取结果不如遍历选取策略理想,但考虑到计算效率,快速选取策略则更适用于实际工程。在以上的仿真中,快速选取策略所分析的像素点仅占遍历选取策略的1.56%,在计算安全半径R时,由于要同时考虑每个像素点的安全性和与其最近障碍之间的距离,二者的计算效率会出现显著差异,后者不仅需要求进行障碍检测的区域面积更广,而且在计算安全半径时对每个像素点采用螺旋搜索法搜索的范围也可能变得更大。
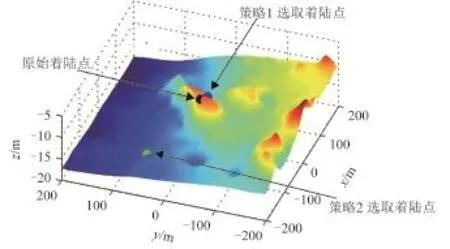
图12 三个着陆点的位置关系Fig.12 The locations of the three landing sites
值得注意的是,不同因素会对着陆点的选择产生相应的影响,地形上最为安全的着陆点不一定能带来最好的着陆效果。通过调整权重,着陆点选取过程中对地形安全性和燃耗的侧重程度会发生改变,最终选取出来的着陆点也会有所不同,其中地形的差异可在地图上直观看出,而燃耗的差异则需要通过下降轨迹的弯曲程度来体现。在本节的仿真中均考虑的是等权的情况(τ1=0.5,τ2=0.5),今后还将结合目标天体特点,针对不等权的情况开展进一步的研究。同时,考虑的范围越大,选择出来的着陆点越好,但这一范围受目标天体和任务约束限制不能盲目扩大,应结合实际情况进行调整。此外,本文所提出的行星安全着陆点综合评估方法还可结合工程实际,针对具体涉及到的每部分因素及其具体形式进行进一步的拓展,以满足任务需求。
4 结束语
未来行星探测任务要求探测器在着陆前能够综合考虑多种影响着陆任务成败的因素,结合探测目标特点与任务需求,对一定范围内的着陆区进行评估,并通过对结果的选择,得到适宜着陆的区域。本文在分析讨论影响安全着陆的地形安全性以及燃耗情况的前提下,提出了一种行星安全着陆点在线选取方法,并结合实际情况给出了快速选取和遍历选取两种策略,以实现不同任务在线选取安全着陆点的目的。Matlab仿真结果表明该方法能够使探测器在避开障碍的同时,以较小的燃耗着陆在行星表面,从而提高探测任务的安全性与可靠性,为未来行星着陆任务提供参考。
[1]Wolf A A,Acikmese B,Cheng Y,et al.Toward improved landing precision on Mars[C]// IEEE Aerospace Conference.[S.l.]:IEEE,2011:1-8.
[2]Johnson A E,Klumpp A R,Collier J B,et al.Lidar-based hazard avoidance for safe landing on Mars[J].Journal of Guidance Control & Dynamics,2002,25(6):1091-1099.
[3]Huertas A,Johnson A E,Werner R A,et al.Performance evaluation of hazard detection and avoidance algorithms for safe Lunar landings[C]// IEEE Aerospace Conference.[S.l.]:IEEE,2010:1-20.
[4]Wong E C,Singh G,Masciarelli J P.Autonomous guidance and control design for hazard avoidance and safe landing on Mars[J].Journal of Spacecraft & Rockets,2006,43(2):378-384.
[5]Prakash R,Burkhart P D,Chen A,et al.Mars science laboratory entry,descent,and landing system overview[C]// Aerospace Conference.IEEE.[S.l.]:IEEE,2008:1-18.
[6]Steinfeldt B A,Grant M J,Matz D A,et al.Guidance,navigation,and control system performance trades for Mars pinpoint landing[J].Journal of Spacecraft & Rockets,2010,47(1):188-198.
[7]董捷,王闯,赵洋.基于工程约束的火星着陆区选择 [J].深空探测学报,2016,3(2):134-139.Dong J,Wang C,Zhao Y.Selection of the martian landing site based on the engineering constraints [J].Journal of Deep Space Exploration,2016,3(2):134-139.
[8]Grant J A,Golombek M P,Grotzinger J P,et al.The science process for selecting the landing site for the 2011 Mars Science Laboratory[J].Planetary & Space Science,2011,59(11):1114-1127.
[9]吴伟仁,于登云.“嫦娥3号“月球软着陆工程中的关键技术[J].深空探测学报,2014,1(2):105-109.Wu W R,Yu D Y.Key technologies in the Chang’e-3 soft-landing project [J].Journal of Deep Space Exploration,2014,1(2):105-109.
[10]郭延宁,马广富,曾添一,等.基于燃料最优解的火星精确着陆制导策略研究[J].深空探测学报,2015,2(1):61-68.Guo Y N,Ma G F,Zeng T Y,et al.Mars precision landing guidance strategy based on fuel optimal solutions [J].Journal of Deep Space Exploration,2015,2(1):61-68.
[11]Cheng Y,Goguen J,Johnson A,et al.The Mars exploration rovers descent image motion estimation system[J].Intelligent Systems IEEE,2004,19(3):13-21.
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68918611
E-mail:cuipy@bit.edu.cn
葛丹桐(1992- ),女,博士生,主要研究方向:行星探测制导与控制、安全着陆与障碍规避。
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68918910
E-mail:gedt@bit.edu.cn
An Integrated Evaluation of Planetary Safe Landing Site
CUI Pingyuan1,2,GE Dantong1,2
(1.Key Laboratory of Autonomous Navigation and Control for Deep Space Exploration,Ministry of Industry and Information Technology,Beijing 100081,China;2.Institute of Deep Space Exploration,Beijing Institute of Technology,Beijing 100081,China)
With the development of precise landing technology,the terrain condition of the area that the vehicle can reach will be more and more complex.To ensure landing safety,the vehicle needs to assess the landing area topography in the field of view based on the sensor information and picks out a place suitable for landing.In order to solve this problem,the paper proposes a planetary landing site selection method and designs a referential selection index.The safe landing site is chosen according to the evaluation result of terrain condition and fuel consumption.MATLAB simulation proves the effectiveness of the method in both rapid selection process and traversal selection process,which improves mission success probability and landing safety.
planetary topography;fuel consumption;landing site selection;safe landing;evaluation method
V448.224
A
2095-7777(2016)04-0363-7
10.15982/j.issn.2095-7777.2016.04.008
崔平远,葛丹桐.一种行星安全着陆点综合评估方法[J].深空探测学报,2016,3(4):363-369.
Reference format:Cui P Y,Ge D T.An integrated evaluation of planetary safe landing site [J].Journal of Deep Space Exploration,2016,3(4):363-369.
崔平远(1961- ),男,教授,博士生导师,主要研究方向:飞行器自主导航与控制、深空探测器自主技术与轨道设计。
[责任编辑:高莎]
2016-07-28;
2016-08-10
国家重点基础研究发展计划“973”项目(2012CB720000);国家自然科学基金(61374216,61304226, 61304248)
猜你喜欢
英语世界(2022年5期)2022-05-18
空间科学学报(2021年2期)2021-07-21
现代电子技术(2021年1期)2021-01-17
核技术(2020年4期)2020-04-18
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
核技术(2016年4期)2016-08-22
核科学与工程(2016年3期)2016-01-03
核科学与工程(2014年3期)2014-05-11