
行星着陆自主导航与制导控制研究现状与趋势
2017-01-18 06:15:01于正湜崔平远
深空探测学报 2016年4期
于正湜,崔平远
(1.北京理工大学 宇航学院,北京 100081;2.深空自主导航与控制工信部重点实验室,北京 100081;3.飞行器动力学与控制教育部重点实验室,北京 100081)
行星着陆自主导航与制导控制研究现状与趋势
于正湜1,2,3,崔平远1,2,3
(1.北京理工大学 宇航学院,北京 100081;2.深空自主导航与控制工信部重点实验室,北京 100081;3.飞行器动力学与控制教育部重点实验室,北京 100081)
行星着陆自主导航与制导控制技术是行星着陆过程的核心技术之一,关系到行星着陆任务的成败。本文基于未来火星和小天体着陆对自主导航与制导控制技术的发展需求,阐述了进一步开展自主导航与制导控制研究的必要性,围绕行星着陆过程环境特点,分析了自主导航与制导控制技术所遇到的挑战,随后概括了行星着陆自主导航与制导控制所涉及的关键技术,并综述了关键技术的研究现状。最后对我国未来行星着陆探测自主导航与制导控制技术的发展方向进行了展望。
行星着陆;火星;小天体;自主导航;制导控制
0 引 言
随着航天科学技术的发展,行星探测已经逐渐成为国际航天领域的热点[1]。火星是太阳系内与地球自然环境最为类似的行星,对火星地质、大气、环境的考察可以为揭示生命起源、地球演化等一系列科学问题提供重要线索。小天体被认为保存有宇宙形成初期的古老物质,因此小天体探测是人类了解宇宙起源的重要途径。同时,小天体独特的环境也有利于对航天新技术进行验证。科学和技术两层面的丰厚回报使得火星和小天体成为人类行星探测的首选目标。
行星着陆探测和采样返回是最具挑战性的行星探测活动,各航天大国也充分认识到开展行星着陆探测和采样返回任务对探索生命起源、演化和提高自身航天技术实力的重要性,都在积极地开展相关任务。其中,安全、精确地着陆到行星表面是成功开展行星着陆探测任务及采样返回的前提,而行星着陆过程的高性能自主导航与制导控制是实现安全、精确行星着陆的基础[2]。
截至目前,人类已经进行了47次火星探测和19次小天体探测。随着行星探测技术水平的提高,对火星和小天体的探测方式将由飞越、绕飞探测逐渐向着陆/附着、巡游、采样返回发展。火星表面存在稀薄的大气,大气环境的复杂与不确定性以及动力学系统的强非线性和时变性是制约火星着陆自主导航与制导控制性能的主要因素。小天体尺寸小且多呈现不规则的形状特征,加之对于形状尺寸与结构组成的先验信息极其有限,其具有不规则弱引力场等多种因素的存在,这些对着陆过程的精确导航制导与控制提出了挑战。因此在已有的火星和小天体探测任务中,只有7次火星着陆任务和3次小天体着陆任务成功实现表面软着陆,如表 1所示。
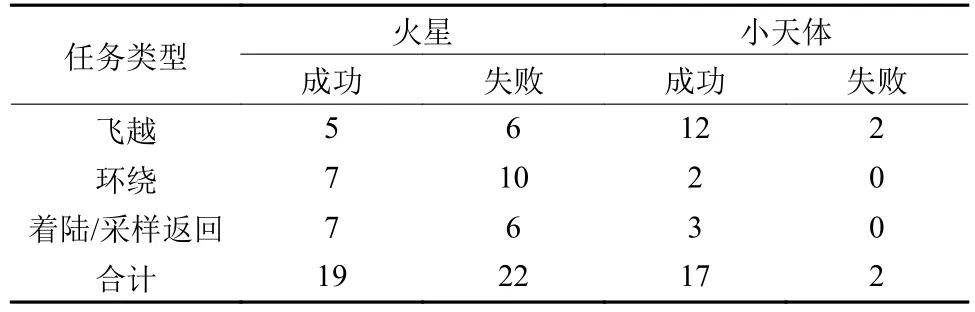
表1 火星及小天体探测任务统计表Table 1 Statistics of Mars and small body exploration missions
在已实施的火星着陆探测任务中,美国的“好奇号”探测器代表了火星探测技术的最高水平,首次在大气进入段采用了大气制导技术,继而在动力下降段采用“天空吊车”的着陆方案,并结合轨迹跟踪实现软着陆,最终着陆误差只有2 km左右[3]。在已发射的小天体附着探测任务中,“隼鸟号”和“罗塞塔”是专门针对小行星和彗星的附着探测任务[4-5]。“隼鸟号”对离子小推力发动机、自主导航与制导控制等技术进行了验证,但在任务执行过程中,探测器推力系统出现故障,导致首次尝试着陆失败,经过多次尝试后最终实现小天体采样,并于2010年6月返回地球。“罗塞塔”任务的“菲莱”着陆器在着陆过程中喷射装置和锚定系统发生故障,导致其并未成功锚定到目标着陆区,在多次弹跳和翻滚后,最终稳定在悬崖底部的阴影区,由于太阳能电池电量不足,导致其目前仍处于休眠状态。
未来的行星探测任务要求探测器具有在较高科学价值的特定区域精确着陆的能力。NASA发布的新一代精确着陆系统(pin-point landing systems,PPL)的目标是火星着陆精度达到10~0.1 km[6],小天体探测的精确着陆更是保证任务成功的前提条件。但现阶段的导航与制导控制方案并不能满足上述行星着陆任务的精度需求,因此需要对火星及小天体着陆动力学特性进行更深入的研究,进而构建先进的自主导航与制导控制方案,以提高行星着陆的精度与安全性。
1 行星着陆自主导航与制导控制问题分析
1.1 行星着陆过程
火星着陆过程依次经历最终接近段、进入段、下降段和着陆段。其中最终接近段一般从进入火星大气前12 h开始,这个阶段主要任务是进行最终的轨道机动,调整探测器姿态,执行巡航级分离指令,同时确定探测器大气进入点状态,并上传导航制导参数。
大气进入段又称为高超声速段,从进入大气层开始,到降落伞完全展开为止,是火星着陆过程中气动环境最恶劣也是最为复杂的阶段。探测器到达火星时,其相对火星的速度为4~7.5 km/s,探测器在进入段依靠气动阻力将速度减小到2 Ma左右,期间探测器将经历峰值过载、峰值动压,并且由于摩擦将产生大量的气动热,为了保护探测器免受气动热的影响,一般将其安装在热防护罩内。
下降段又可细分为伞降段和动力下降段。其中伞降段从降落伞的展开开始,到下降发动机点火为止,这个阶段主要利用降落伞进一步降低探测器的飞行速度,同时实施防热罩抛离、导航敏感器初始化等。动力下降段从下降发动机点火到下降级稳定为止,这个阶段的主要目的是消除水平及垂直速度,稳定下降级,为最终的着陆做好准备。相比大气进入段,在动力下降段探测器具有较强的机动能力,所以未来火星着陆任务的自主障碍检测规避及下降制导等都将在这个阶段实施。
着陆段从释放巡视器开始,到巡视器着陆为止。这个阶段主要目的是安全释放巡视器,并实施下降级与巡视器的分离,最终巡视器独自开展科学探测任务。最新的“好奇号”探测器首次采用了“天空吊车”的着陆方式,下降级通过吊带将巡视器匀速缓慢释放直至着陆。这种着陆方式适用于大质量飞行器的着陆过程,并且比传统的着陆方式具有更高的着陆精度。“好奇号”的火星着陆过程如图 1所示。
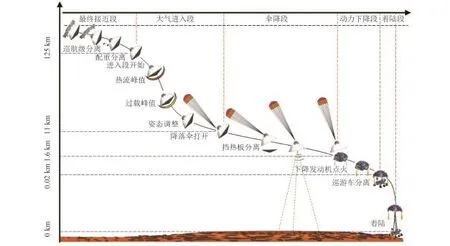
图1 “好奇号”火星着陆过程示意图Fig.1 Schematic of Mars landing of Curiosity
根据探测任务的需求,可以将小天体附着探测任务过程分为接近交会段、环绕段以及下降附着段。小天体探测任务的接近交会段从光学导航相机捕获到目标星开始。在接近交会目标星的过程中,依照后续任务的不同,探测器可分为飞越、撞击、绕飞、附着等模式。在绕飞模式下,探测器在接近交会段实施制动机动以进入环绕目标小天体的目标轨道,进而执行环绕、下降附着等后续任务。
在环绕探测阶段,探测器利用携带的科学载荷对目标小天体进行观测、重建并修正目标星相关模型及物理参数。同时,随着目标星物理参数精度的不断提高,探测器不断降低轨道高度,进一步提高对小天体表面的测绘精度,为后续附着或采样返回探测的实施奠定基础。
下降附着过程可细分为下降段和最终附着段两部分。在下降段,探测器脱离绕飞轨道落向小天体表面,此时尚不能对目标着陆区进行精细观测,激光测距仪也不能获取相对着陆点的距离信息,探测器首先飞向目标着陆区附近,以获取更高精度的测量信息。在接近目标着陆区的过程中,随着对着陆区观测精度的提高,探测器能够获取相对着陆点的测量信息。在最终附着段,探测器综合利用光学相机与激光测距仪等导航敏感器,自主向目标着陆点下降并使附着速度逐渐降低为零,实现安全、精确附着。
1.2 行星着陆自主导航与制导控制的挑战
为了成功实施精确行星软着陆,着陆全过程必须具备自主导航与制导控制能力。这一方面需要精度高、实时性强的自主导航系统,另一方面需要鲁棒性强、稳定性好的制导控制系统的支持。行星探测目标一般距离地球十分遥远,而着陆过程相对较短,火星大气进入段作为着陆过程中历时最长的阶段也只有短暂的4~6 min,然而地火之间最短的通信时间长达6 min以上,所以传统的基于地面深空网遥测信息的导航及遥控操作方式难以应用于行星着陆。同时行星着陆过程动力学环境的特殊性给精确导航与制导控制带来了巨大的障碍。其中导航观测信息匮乏、动力学系统非线性和不确定性、以及制导控制能力弱是行星着陆自主导航与制导控制所面临的三个主要挑战,具体描述如下:
1)导航观测信息匮乏
导航观测信息匮乏主要体现在两个方面,一是导航观测手段有限,二是观测信息所携带的状态信息有限。例如在火星大气进入段由于热防护罩的包裹,大量导航敏感器无法开机工作,可利用的导航信息十分匮乏。虽然有学者提出了基于无线电测量的导航方案来弥补导航信息的缺失,但现阶段缺少足够的可以提供导航服务的信标或轨道器,很难实现探测器的全状态估计。这些因素都对自主导航方案设计提出了诸多要求[7]。
2)动力学系统非线性和不确定性
探测器在火星进入段运动速度快,且受到气动力的作用,造成动力学模型的高动态与强非线性,同时大气密度误差、阵风等因素都造成动力学系统的扰动,另外气动参数、结构参数等都难以在线精确辨识,也增加了动力学系统的不确定性。小天体形状不规则、自旋不稳定,且多数小天体缺少物理特性的先验信息,这些都导致小天体周围的引力场呈现出较强的非线性与不确定性[8]。这些对导航与制导控制系统的鲁棒性及稳定性提出了较高的要求。
3)制导控制能力弱
火星大气进入过程中探测器通过质心偏移获得升力,并通过改变倾侧角的大小与方向产生一定的控制能力。与有翼飞行器相比,火星探测器升阻比小、控制能力弱,难以实现大范围机动。在初始偏差、过程扰动同时存在的情况下单纯通过倾侧角一个控制量满足纵程与横程约束及多种路径约束对制导控制系统设计提出了很大的挑战[9]。
2 行星着陆关键技术研究现状与展望
从现有的研究进展来看,要实现精确安全的行星着陆探测,满足探测器自主导航与制导控制理论方法的性能需求,亟待解决以下若干关键技术问题:
1)自主导航方案设计与优化
自主导航方案的优化设计是提高行星自主导航精度的重要手段,在导航信息匮乏情况下显得尤为重要。虽然已有学者论证了火星大气进入段自主导航方案的可行性,但对导航方案优化设计问题仍未有系统研究,同时导航观测特性给自主导航方案优化设计问题提出了多种约束条件。因此研究自主导航系统的性能评估准则,提出导航精度评价指标,并分析导航信标布局构型与导航性能间的理论关系,在此基础上建立导航方案多种约束模型,优化信标布局构型,合理利用有限的观测信息使导航性能达到最优,同时进一步寻求最优的导航观测方案,是行星着陆自主导航必须解决的关键问题之一。
2)多约束不确定条件下的轨迹优化
火星大气进入段大气制导技术是提高火星着陆精度的必要手段,而火星大气进入段自主导航与制导控制性能具有互相耦合的关系,一方面进入轨迹的形状将影响导航系统可观测度及导航精度,另一方面导航精度又制约了制导控制系统性能,从而改变进入轨迹的形状。同时,大气进入段气动热、开伞点状态、以及信标的可见性等为参考轨迹优化提出了严苛的约束条件。所以需要在满足多种约束的前提条件下充分考虑导航精度,提高导航制导性能。同时火星大气密度扰动、小天体引力场及表面特征、初始状态误差等也造成了动力学系统的不确定性。因此如何在可观测度分析的基础上引入系统不确定性影响因素以提高参考轨迹优化对大气进入段扰动的鲁棒性,也是需要解决的关键问题。
3)欠观测条件下的状态高精度估计
基于惯性测量单元航位递推的惯性导航方案无法满足未来行星着陆精度需求,而基于导航滤波方法的状态估计是其他自主导航方案的基础。在行星着陆阶段的复杂环境中,导航信息匮乏、动力学模型强非线性、系统模型参数不确定性、状态误差分布非高斯性等不利因素共同导致了自主导航性能退化的情况。同时探测器上携带的星载计算机的数据存储与运算能力有限,使得高性能导航传感器以及高精度导航滤波算法的应用受到了限制。因此揭示环境扰动不确定性对导航性能的影响机理,提高欠观测、非线性、强扰动条件下的状态实时估计精度成为导航方案设计中迫切需要解决的问题。
4)有限控制能力下的高精度制导
在火星大气进入段,探测器采用质心偏置的方法产生配平攻角,进而获得一定的升力,并采用倾侧角作为唯一的控制变量进行控制,导致升阻比小,控制能力有限,容易出现饱和情况。同时在火星大气进入段,主要依靠气动力进行控制,由于火星大气稀薄,探测器运动中的机动性远远弱于地球大气。而在飞行过程中,制导指令不仅要使探测器达到开伞条件,同时还要满足热流约束、过载约束等一系列路径约束,另外随着火星着陆精度的提高对开伞点位置、高度、速度等都有明确的精度需求。因此单凭控制能力有限的倾侧角控制实现精确制导对制导系统设计提出了严苛的要求,有限控制能力下的高精度制导是未来行星着陆探测亟待解决的关键问题之一。
5)小天体弹跳附着与移动控制策略
由于小天体尺寸小、形状特征奇特,引力场呈现出微弱及不规则特性,加之导航制导与控制性能约束,首次附着尝试完全成功的难度极大。而碰撞和扰动所引起的探测器弹跳是威胁任务成功的主要因素。若在弹跳后未采取补救措施,极有可能导致探测器倾覆甚至逃逸。另外小天体表面移动方式主要是弹跳式,由于小天体表面逃逸速度低,远距离转移需要采用多次弹跳方案以免所施加的单一速度脉冲超过逃逸速度造成探测器逃逸。因此必须针对探测器弹跳附着和移动控制策略开展研究,一方面在附着弹跳发生后及时采取补救措施,另一方面可以保证远距离弹跳移动的精度与安全性。
2.1 自主导航方案设计与优化
火星最终接近段导航信息源匮乏,如何提高导航自主性与精度是最终接近段自主导航的首要目的。基于脉冲星测量的导航方法一直是近年来的研究热点,Sheikh,Emadzadeh等诸多学者对脉冲星导航的可行性与精度以及解算方法等进行了深入的研究[10-11]。2011年,NASA联合美国大学空间研究联合会启动了“中子星内部组成探测器任务”(neutron-star interior composition explorer ,NICER),其中的空间站X射线授时与导航技术试验项目(station explorer for x-ray timing and navigation technology,SEXTANT)专门用于论证深空探测背景下的X射线脉冲星自主导航技术[12]。脉冲星导航具有自主性高、导航信息源分布广泛等优势,可用以解决火星最终接近段导航信息源匮乏的难题。在地面测控信息切断后仍可使用脉冲星测量信息与星上惯性测量单元输出及其他导航测量信息相融合,实现星上实时自主导航。在此基础上,Yu等学者利用Fisher信息矩阵概念解析分析了导航脉冲星方向与导航性能的关系,并提出了导航脉冲星优选方法[13]。Cui等在X射线脉冲星导航的基础上引入与火星轨道器的无线电测量信息避免了因系统非线性造成的估计滤波性能下降问题[14]。
“海盗号”作为NASA第一颗成功软着陆火星的探测器,在进入段采用的惯性导航技术为后续的火星着陆任务提供了大量的技术支持。然而,现阶段采用的惯性导航精度会因进入段初始状态误差、IMU(惯性测量单元)漂移和随机误差、外部环境扰动等因素影响而随时间发散,不能长时间单独工作,造成导航精度较低,难以达到未来火星精确着陆的精度需求。为了提高进入段导航性能,各国学者提出了若干潜在的导航方案。Ely和Lévesque等针对火星进入段非线性动力学系统,引入火星大气密度指数模型,提出了将IMU测量的加速度数据作为外部观测量的进入段导航观测方案[15-16]。Dubois-Matra和Zanetti等人也做了相似的研究,证明该导航方法比惯性导航算法对大气模型扰动具有更强的鲁棒性[17-18]。此外可以利用潜在的导航信标资源,例如火星探测任务轨道器或火星表面人工信标,通过探测器的相对无线电测量丰富大气进入段导航信息,进而修正惯性导航带来的误差。国内外学者对相似的导航方案进行了大量的研究,并提出了火星网络(Mars network)的概念[19]。为了进一步提高信标相对测量信息的利用效率,Yu等以可观测度为指标优化了火星表面信标位置[20],并引入Fisher信息矩阵解析推导了信标数量和布局构型与导航系统可观测度的关系[21],在此基础上实现了火星导航轨道器的轨道优化,并比较了利用轨道器及表面信标的导航性能差异[22]。
在火星动力下降及着陆段,大量导航敏感器可以开机使用,采用多普勒雷达和高度计通过滤波算法可以有效进行火星下降段导航,而且在几次成功的火星着陆探测任务中也表现出良好的性能。为了进一步提高火星着陆导航精度,美国喷气推进实验室(Jet Propulsion Laboratory ,JPL)开发了基于视觉测量的自主精确着陆和障碍规避技术(autonomous landing and hazard avoidance technology,ALHAT),并将其成功应用于月球着陆器“牵牛星”的前期设计工作中[23]。欧空局也组织研究人员对基于光学测量的自主导航方案进行了研究,研发了基于激光雷达(LIDAR)的软着陆GNC仿真系统[24]。此外Li等分别对基于光学信息辅助IMU导航以及基于微型高度计和速度计(MCAV)辅助IMU导航的机理进行了研究[25-26],提出了基于导航相机光学测量以及微型高度计和速度计辅助IMU的火星下降段导航方案。为了解决导航信息处理计算量大的问题,Yu等人利用无线电测距、多普勒雷达、导航相机等敏感器结合信息融合思想进行自主导航及加速度计校准,并对火星表面无线电信标位置进行优化[27]。Qin等学者在“好奇号”着陆导航方案基础上引入了相对轨道器的无线电测量信息构建导航方案,提高了绝对位置估计精度[28]。
小天体附着过程中基于光学图像的自主导航方式是主要的研究方向。美国JPL实验室通过处理星体表面光学图像和激光测距仪测得的探测器到特征点的距离,对探测器的位置和相对运动信息进行估计[29]。邵巍等提出了一种基于特征匹配的小天体自主附着导航方法,并利用拼接图像建立虚拟地图,在无法观测到目标附着点时也能确定探测器的位置[30]。此外田阳等提出了一种跟踪序列图像特征点并结合到星体表面测距信息的自主附着导航方法,且不需特征点的精确位置,提高了方法的适用性[31]。朱圣英等研究了以地形特征为导航路标的小天体绕飞和星际着陆自主导航方法,并基于可观测度指标分析了路标几何分布对导航精度的影响,给出了导航路标选取的基本准则[32]。
行星着陆各阶段动力学环境复杂多样,导航性能需求不同,未来的导航方案设计与优化研究将重点结合不同阶段动力学特性与精度需求,寻求潜在导航信息源,构建新的导航方案,并结合可观测性、估计误差下限、关键点导航精度等对敏感器配置进行优化,达到导航信息利用最大化。
2.2 多约束不确定条件下的轨迹优化
行星着陆过程中的轨迹优化是提高任务安全性的重要手段,也是轨迹跟踪制导的基础。目前行星着陆轨迹优化问题的求解方法可以大体分为三类:间接法、直接法以及启发式优化方法。间接法通过协状态的引入将最优控制问题转化为两点边值问题,结合条件方程(正则方程、横截条件和控制方程),得到最优控制量与状态轨迹。Pontryagin极小值原理在求解最优控制量时引入了路径约束,从而进一步将间接法拓展到了工程实际中。Vinh等针对简化的大气内平面运动模型对最优飞行轨迹进行了求解,针对不同的飞行模式对轨迹优化问题开展了深入研究[33]。Istratie等利用间接法对不同优化指标下的跳跃式再入返回轨迹优化问题进行了求解[34]。雍恩米等对利用间接法求解轨迹优化问题的理论及数值解法进行了较为全面的研究[35]。虽然间接法所得到的结果可以保证是全局最优的,并可以解决具有路径约束的最优控制问题,但是对于具有复杂约束的问题其推导和求解过程过于繁琐。同时求解过程对于协态变量的初值猜测非常敏感,导致收敛半径小,初值的猜测非常困难。
随着计算机性能的提高,直接法于20世纪70年代逐渐兴起。直接法在有限的时间节点上将控制量进行离散,从而将连续的动力学方程约束转化为代数约束,结合路径约束与边界约束将最优控制问题转化为非线性规划(non-linear programming,NLP)问题,从而将研究者可以从繁复的数学分析中解脱出来,并且可以解决非常复杂的优化问题。近年来,伪谱法(正交配点法)成为直接法的一个重要发展方向。该方法采用全局插值多项式的有限基底在一系列配点上近似控制变量与状态,其中配点一般为正交多项式的根。根据所采用的差值多项式与配点类型的不同,常用的伪谱法包括Chebyshev伪谱法、Legendre伪谱法、Radau伪谱法、Gauss伪谱法等。Fahroo充分比较研究了不同伪谱法的精度、收敛速度和计算效率等性能[36]。其中Gauss伪谱法是最近由Benson等在Legendre伪谱法的基础上提出的,Benson同时证明了NLP问题的库恩塔克条件(karush-kuhn-tucker,KKT)与最优控制问题的一阶最优性条件的等价性[37]。伪谱法凭借其精度高、收敛快的特点在近期航空航天领域得到了广泛的应用[38-40]。此外Lantoine等在小天体附着下降轨迹优化研究的基础上将轨迹优化问题转化为两点边值最优控制问题,并提出了一种将直接法与间接法结合的求解方法,在保证精度的同时减少了求解时间[41]。
随着现代优化方法的快速发展以及计算机性能的逐渐提高,启发式优化算法在求解高维复杂优化问题中得到广泛应用。启发式算法包括遗传算法、模拟退火、神经网络、进化算法等,这些智能算法不需要提供梯度信息,应用起来更为直观。在大气进入段的轨迹优化问题中,Arora等利用遗传算法解决了动压和热流约束下可回收空间飞行器的再入轨迹优化问题[42]。Lafleur等定义了10个时间节点上的倾侧角作为优化变量,利用粒子群算法求解了以开伞点高度为性能指标的最优火星进入轨迹[43]。同样针对火星进入轨迹优化问题,Yu等考虑动压大小划分时间节点,并结合拟积分概念,采用遗传算法优化倾侧角剖面[44]。Rahimi等将探测器攻角与侧滑角描述为时间的三角函数的加权和形式,并利用粒子群算法优化三角函数的权值,同样实现了大气进入过程的轨迹优化[45]。但是启发式的优化算法同样无法保证轨迹优化结果的全局最优性,同时求解过程所需的计算量较大。
现阶段大多轨迹优化问题研究都针对确定性系统,在实际系统不确定性存在的情况下极易出现约束不满足情况。为了提高不确定环境下轨迹优化性能,Yu利用混沌多项式法描述探测器状态及约束在扰动环境中的传播规律,进而基于状态和约束分布特性重新描述鲁棒轨迹优化问题,提高了轨迹优化结果的鲁棒性[46]。Hu考虑了动力学参数和状态不确定性的影响,提出了一种小天体附着轨迹抗差优化方法,该方法通过同时优化燃料和误差协方差,降低了轨迹跟踪过程中的误差[47]。
现阶段行星着陆轨迹优化方法大多存在计算量大的问题,因此只适用于离线规划。未来的研究一方面将针对轨迹优化方法的简化,降低计算量,并寻求在线生成优化轨迹的可能性;另一方面将进一步考虑环境及状态不确定性扰动影响,从轨迹优化的角度提高轨迹跟踪制导对环境扰动的鲁棒性。
2.3 欠观测条件下的状态高精度估计
对于非线性系统,通常采用扩展Kalman滤波器(extended kalman filter,EKF),通过对非线性系统线性化,利用局部线性系统进行误差方差的递推,并结合Kalman最优估计原理进行状态及误差方差阵的更新。EKF是现阶段自主导航领域应用最为广泛的导航滤波器,已经在多个深空探测任务中得以验证,但由于计算机数值计算过程中舍入误差和截断误差的积累与传递,容易造成误差方差阵失去对称正定性,造成滤波结果的不稳定,为了EKF算法的数值稳定性,学者们提出了平方根滤波等一系列数值鲁棒的滤波算法。
基于Monte-Carlo法的Kalman滤波算法逐渐成为学者们研究的热点,自从集合Kalman滤波器(ensemble kalman filter,EnKF)思想的提出[48],此类滤波器取得了快速的发展,并被广泛地应用于多个领域。EnKF直接考虑了动力学系统的非线性特性,不需要线性化过程,并且不需要误差的高斯分布假设。Whitaker等学者对EnKF进行了重要的发展,提出了集合平方根滤波算法(iterative ensemble square root filter,EnSRF)[49],一定程度上减小了采样误差。但是对于高维或不确定因素多的动力学系统而言,EnKF需要大量采样点以保证运算精度,所需计算量过大。与EnKF类似,粒子滤波算法(particle filter,PF)通过一系列随机样本的δ函数的加权和来近似后验概率密度函数[50-51]。但粒子滤波在运算过程中容易出现蜕化现象,同时也存在计算量大的问题。无迹Kalman滤波算法(unscented kalman filter,UKF)是另外一类用采样策略逼近状态非线性分布的方法,以无迹变换为基础,采用Kalman滤波框架,具体采样形式为确定性采样,而非EnKF与粒子滤波的随机采样[52]。UKF的计算量基本与EKF算法相当,已经被广泛应用于航天器的自主导航仿真验证中[16,53],但只能处理高斯型的状态及测量误差,在对非线性、非高斯系统的滤波的计算过程中,容易出现滤波性能下降的问题。
混沌多项式理论的引入为非线性滤波器的发展提供了新的方向。Pence等将混沌多项式理论与极大似然估计相结合,并提出了基于梯度法的状态更新方法[54]。Liu等发展了基于混沌多项式的集合Kalman滤波器,通过随机配置法求解混沌多项式系数的微分方程组,并证明了滤波器的性能[55]。Yu等发展了基于混沌多项式的非线性滤波方法,并将其运用在火星大气进入自主导航中,考虑了大气密度不确定性,并分析了其鲁棒性及估计精度的优势[56]。但基于混沌多项式的滤波算法普遍存在计算量大的缺点,如何在保证滤波精度的前提下进一步降低计算量仍然是有待解决的课题。另外,针对行星着陆过程中的动力学系统不确定性,Wang等将弱敏感控制的思想引入状态估计中,提出了弱敏感Kalman滤波算法[57]。利用类似的思想,Lou等考虑大气密度及升阻比不确定性,提出了一种鲁棒弱敏感滤波算法,旨在提高火星大气进入段导航性能[58]。
实际行星着陆动力学环境复杂、扰动因素多变、误差特性不确知,而现有的导航滤波算法主要从理论上解决最优估计问题,因此后续针对欠观测条件下状态高精度估计的研究应在系统误差及扰动影响特性的基础上进行合理假设,同时简化算法结构,降低计算量,以实现高精度实时状态估计。
2.4 有限控制能力下的高精度制导
火星大气进入制导是实现精确火星着陆的关键技术。NASA最新实施的“好奇号”火星着陆任务在大气进入过程中首次采用了制导技术,将着陆精度提高到10 km级,实现了真正意义上的精确着陆。现阶段国内外对于大气进入制导方法的研究可以划分为轨迹跟踪制导与预测校正制导两类。
轨迹跟踪制导方法可分为纵向制导与侧向制导,其中以纵向制导为主,用以控制倾侧角的大小。侧向制导主要通过规划进入走廊判定倾侧角的符号消除探测器的横程误差。轨迹跟踪制导的发展可以大致分为两代:第一代是基于Apollo任务的返回制导律,基于线性化标称轨迹根据当前误差快速预测纵程误差,而倾侧角指令的生成用以消除纵程误差。虽然实际没有直接跟踪标称轨迹,但制导指令的生成依赖于标称轨迹。第二代是针对航天飞机等大升阻比的探测器,将纵向标称轨迹定义为阻力加速度-速度或阻力加速度-能量剖面,实际飞行过程中通过航迹角的改变消除实际阻力加速度与标称值之间的偏差。轨迹跟踪制导问题可以归纳为如何设计反馈制导律问题。Bharadwaj利用反馈线性化理论设计了航天飞机的再入制导律[59],随后Saraf又将二维制导律推广至三维,提出了改进的加速度制导方法(evolved acceleration guidance logic for entry,EAGLE)[60]。Lu基于线性时变LTV模型,引入滚动时域控制方法,提出了一种闭环轨迹跟踪方法[61]。Cho将非线性微分几何理论引入轨迹跟踪制导,并结合比例导引法的思想设计了制导律,可以对多种形式轨迹进行精确跟踪[62]。Xia初步尝试将自抗扰控制用于火星大气阻力跟踪制导律的设计,并验证了其可行性与鲁棒性[63]。
轨迹跟踪方法容易受到环境扰动、初始误差等的影响造成跟踪性能下降,未来的研究方向是如何提高对环境扰动与状态偏差的鲁棒性。
预测校正方法又分为解析预测校正和数值预测校正。其中解析预测校正通过对动力学方程的简化,结合特定状态假设解析计算终端状态,并通过与预定落点误差生成制导指令。虽然计算量小,但简化和假设过程易造成计算精度低的问题。随着计算机性能的逐渐提高,数值预测校正的在线实施逐渐成为可能。Powell为未来的火星探测任务设计了一种基于倾侧角反转策略的预测校正制导律[64]。Joshi在考虑路径约束的前提下,基于实时轨迹规划提了一种大气再入预测制导方法,并且证明了可以在满足不同路径约束前提下到达终端条件[65]。Brunner等针对小升阻比探测器的跳跃式再入问题,提出了一种数值预测校正方法,考虑三自由度动力学模型,在倾侧角线性变化的假设条件下通过迭代确定满足纵程约束的倾侧角大小[66]。夏元清在该方法的基础上,采用常值滚转角策略直接通过纵程差迭代计算倾侧角大小,减少了迭代次数[67]。虽然预测校正制导方法具有比轨迹跟踪方法更强的鲁棒性,但轨迹预测的计算量仍然较大,而且在校正算法中难以直接处理路径约束条件,这也是预测校正方法需要解决的两个难点问题。
2.5 小天体弹跳附着与移动控制策略
弹跳策略普遍运用于小天体采样过程中,TAG(touch-and-go)是弱引力环境下探测器完成对小天体表面采样的有效手段。在TAG过程中,探测器通常先在目标小天体上方进行悬停,待确定采样点以后,探测器下降到小天体表面,在地面只做几秒钟的停留完成采样任务后迅速上升离开小天体表面。TAG采样已经成功应用于“隼鸟号”任务[68],“源光谱释义资源安全风化层辨认探测器” 任务(origins spectral interpretation resource identification security regolith explorer,OSIRIS-Rex)也将采用这种方式完成采样返回[69]。由于小天体引力微弱,表面不能提供足够的摩擦力,传统的轮动式巡游器无法有效运动,因此小天体表面巡视器通常也采用弹跳式策略。针对小天体表面弹跳移动控制问题,Ulamec对行星探测任务中弹跳式探测器的应用价值进行了深入研究,并且在基于旋转质量块加速弹跳原理的基础上提出了撑杆跳弹跳概念[70]。前苏联的“福波斯2号”任务中就携带了一个计划着陆于火卫一的弹跳探测器PROP-F,虽然任务失败,但弹跳探测器的概念对小天体探测具有很高的参考价值[71]。“隼鸟号”任务中,巡视器MINERVA的驱动装置为扭矩电机,它可以提供小于10 cm/s的跳跃速度。Yoshimitsu基于MINERVA巡视器建立了小天体表面弹跳过程动力学,并分析了不同环境参数下弹跳性能与应用前景[72]。在“隼鸟2号”任务中,日本宇航局与德国宇航中心共同研发了弹跳式探测器MASCOT。Dietze在对MASCOT的研究过程中提出了两种移动控制策略,并在此基础上建立了巡视器与土壤的动力学模型,并进行了多体动力学仿真分析[73]。Pavone与美国JPL合作研发了用于火卫一探测的“刺猬”机器人,同样采用弹跳移动控制策略,并给出了滚动与弹跳的二维和三维动力学模型[74]。Bellerose针对小天体弹跳移动控制,基于椭球体引力模型,提出了探测器移动距离和所需时间的解析计算方法,并基于滑模控制思想研究了单个和多个探测器控制方法[75-76]。Mège等针对小天体复杂地形设计了对附着环境具备鲁棒性的弹跳运动机构,可以实现从几米到几十米距离的精确弹跳移动[77]。
对于小天体弹跳附着与移动控制策略的研究集中在小天体表面弹跳巡视器的被动控制,未来小天体弹跳附着与移动策略的研究一方面需要针对附着弹跳后的制导控制方法,或弹跳附着主动控制策略,降低倾覆或逃逸可能性,提高小天体附着的安全性;另一方面需要针对远距离弹跳式移动开展主动控制方法研究,在整个弹跳控制过程实时采取控制修正轨迹误差,实现小天体表面高精度移动探测。
3 结束语
自主导航与制导控制是行星着陆过程的关键技术,直接关系到着陆任务的成败。本文首先阐述了进一步开展自主导航与制导控制研究的必要性,并结合行星着陆过程及特殊的环境特点分析了自主导航与制导控制所面临的挑战。概括了行星着陆自主导航与制导控制所涉及的关键技术并总结了研究现状及发展趋势。
目前,国际上对行星着陆过程自主导航与制导控制已经进行了大量的研究与验证工作,提出了众多未来可行的导航方案与精确制导方法,具有潜在应用价值。随着行星探测任务的逐渐开展,基于导航网络与无线电测量的组合导航、精确大气进入制导、小天体附着弹跳主动控制等必将成为提高行星着陆任务精度的研究趋势,而行星着陆自主导航与制导控制技术必将向着更精确、更可靠、更智能的方向发展。我国将行星着陆探测列为未来深空探测的重点规划之一,并计划在2020年独立实施火星探测任务。随着载人航天和探月工程的顺利实施,我国已经掌握了再入返回、自主导航等一系列关键技术,对于行星着陆自主导航与制导控制技术的研究具有一定的参考价值。但由于火星与小天体环境的特殊性,高精度的自主导航与制导控制仍面临诸多技术难题。因此,有必要结合我国的实际情况和已经具备的技术能力,对行星着陆自主导航与制导控制技术进行更为深入的研究,为我国未来的行星着陆探测任务提供必要的技术储备。
[1]Wu W,Liu W,Qiao D,et al.Investigation on the development of deep space exploration[J].Science China Technological Sciences,2012,55(4):1086-1091.
[2]崔平远,徐瑞,朱圣英,等.深空探测器自主技术发展现状与趋势[J].航空学报,2014,35(1):13-28.Cui P Y,Xu R,Zhu S Y,et al.State of the art and development trends of on-board autonomy technology for deep space exploration[J].Acta Aeronautica et Astronautica Sinica,2014,35(1):13-28.
[3]Kerr R A.Mars exploration hang on! Curiosity is plunging onto Mars [J].Science Magazine,2012,336(6088):1498-1499.
[4]Yano H,Kubota T,Miyamoto H,et al.Touchdown of the Hayabusa spacecraft at the Muses Sea on Itokawa[J].Science,2006,312(5778):1350-1353.
[5]Hand E.Planetary science Philae probe makes bumpy touchdown on a comet[J].Science,2014,346(6212):900-901.
[6]Braun R D,Manning R M.Mars exploration entry,descent and landing challenges[J].Journal of Spacecraft and Rockets,2007,44(2):310-323.
[7]崔平远,于正湜,朱圣英.火星进入段自主导航技术研究现状与展望[J].宇航学报,2013,34(4):447-456.Cui P Y,Yu Z S,Zhu S Y.Research progress and prospect of autonomous navigation techniques for Mars entry phase[J].Journal of Astronautics,2013,34(4):447-456.
[8]崔平远,乔栋.小天体附近轨道动力学与控制研究现状与展望[J].力学进展,2013,43(5):526-539.Cui P Y,Qiao D.State-of-the-art and prospects for orbital dynamics and control near small celestial bodies[J].Advances in Mechanics,2013,43(5):526-539.
[9]崔平远,胡海静,朱圣英.火星精确着陆制导问题分析与展望[J].宇航学报,2014,35(3):245-253.Cui P Y,Hu H J,Zhu S Y.Analysis and prospect of guidance aspects for Mars precision landing[J].Journal of Astronautics,2014,35(3):245-253.
[10]Sheikh S I,Pines D J,Ray P S.Spacecraft navigation using X-ray pulsars[J].Journal of Guidance,Control and Dynamics,2006(29):49-63.
[11]Emadzadeh A A,Speyer J L.Navigation in space by X-ray pulsars[M].New York:Springer,2011.
[12]Winternitz L,Gendreau K C,Hassouneh M A,et al.The role of X-rays in future space navigation and communication[J].Advances in the Astronautical Sciences,2013(149):537-551.
[13]Cui P,Yu Z,Zhu S,et al.Real-time navigation for Mars final approach using X-ray pulsars[C]//AIAA Guidance,Navigation,and Control Conference.Boston:[s.n.],2013:19-22.
[14]Cui P,Wang S,Gao A,et al.X-ray pulsars/Doppler integrated navigation for Mars final approach[J].Advances in Space Research,2016,57(9):1889-1900.
[15]Ely T A,Bishop R H,Dubois-Matra O.Robust entry navigation using hierarchical filter architectures regulated with gating networks[C]//16th International Symposium on Spaceflight Dynamics Symposium.Pasadena:[s.n.],2001:3-6.
[16]Lévesque J F,Lafontaine J D.Innovative navigation schemes for state and parameter estimation during Mars entry[J].Journal of Guidance,Control,and Dynamics,2007,30(1):169-184.
[17]Dubois-Matra O,Bishop R H.Multi-model navigation with gating networks for Mars entry precision landing[C]//AIAA Atmospheric Flight Mechanics Conference.Providence:AIAA,2004 :16-19.
[18]Zanetti R,Bishop R H.Adaptive entry navigation using inertial measurements[C]//Proceedings of the 17th Annual Space Flight Mechanics Meeting.Sedona:American Institute of Aeronautics and Astronautics,2007:457-469.
[19]Lightsey E G,Mogensen A,Burkhart P D,et al.Real-time navigation for Mars missions using the Mars network[J].Journal of Spacecraft and Rockets,2008,45(3):519-533.
[20]Yu Z,Cui P,Zhu S.Observability-based beacon configuration optimization for Mars entry navigation[J].Journal of Guidance,Control,and Dynamics,2015,38(4):643-650.
[21]Yu Z,Zhu S,Cui P.Orbit optimization of Mars orbiters for entry navigation:from an observability point of view[J].Acta Astronautica,2015(111):136-145.
[22]Yu Z,Cui P,Zhu S.On the observability of Mars entry navigation using radiometric measurements[J].Advances in Space Research,2014,54(8):1513-1524.
[23]Ely T A,Heyne M,Riedel J E.Altair navigation during trans-lunar cruise,lunar orbit,descent and landing [C]//AIAA Guidance,Navigation,and Control Confe-rence.Toronto:AIAA,2010.
[24]Xavier S,Sebastien B.LiGNC summary report[R].[S.l]:ESA Technology Report,2005.
[25]Li S,Cui P,Cui H.Vision-aided inertial navigation for pinpoint planetary landing[J].Aerospace Science and Technology,2007(11):499-506.
[26]Li S,Peng Y,Lu Y,et al.MCAV/IMU integrated navigation for the powered descent phase of Mars EDL[J].Advances in Space Research,2010,46(5):557-570.
[27]Yu Z,Xu R,Cui P.A multi sensor based integrated navigation for pin-point landing on Mars[C]//AIAA Guidance,Navigation,and Control Conference.Kissimmee:AIAA,2015:5-9.
[28]Qin T,Zhu S,and Cui P.An innovative navigation scheme of powered descent phase for Mars pinpoint landing [J].Advances in Space Research,2014,54(9):1888-1900.
[29]Johnson A E,Yang C,Matthies L H.Machine vision for autonomous small body navigation[C]//IEEE Aerospace Conference.Big Sky:IEEE,2000:18-25.
[30]邵巍,常晓华,崔平远,等.惯导融合特征匹配的小天体着陆导航算法[J].宇航学报,2010,31(7):1748-1755.Shao W,Chang X H,Cui P Y,et al.Coupled feature matching and INS for small body landing navigation[J].Journal of Astronautics,2010,31(7):1748-1755.
[31]田阳,崔平远,崔祜涛.基于图像序列的软着陆小天体自主导航方法[J].宇航学报,2009,30(1):210-214.Tian Y,Cui P Y,Cui H T.Autonomous navigation method for soft landing on small body based on image sequence[J].Journal of Astronautics,2009,30(1):210-214.
[32]朱圣英,崔平远,崔祜涛,等.基于路标观测角的星际着陆器自主位姿确定技术[J].航空学报,2010,31(2):318-326.Zhu S Y,Cui P Y,Cui H T,et al.Autonomous position and attitude determination for interplanetary landers based on landmark observation angles[J].Acta Aeronautica et Astronautica Sinica,2010,31(2):318-326.
[33]Vinh N X.Optimal Trajectories in Atmospheric Flight[M].New York:Elsevier Scientific Software,1981.
[34]Istratie V.Optimal skip entry with heat constraints into atmosphere[C]// International Conference of Numerical Analysis and Applied Mathematics.Corfu:[s.n.],2007:16-20.
[35]雍恩米,陈磊,唐国金.飞行器轨迹优化数值方法综述[J].宇航学报,2008,29(2):397-406.Yong E M,Chen L,Tang G J.A survey of numerical methods for trajectory optimization of spacecraft[J].Journal of Astronautics,2008,29(2):397-406.
[36]Fahroo F,Ross I M.Costate estimation by a Legendre pseudospectral method[J].Journal of Guidance,Control,and Dynamics,2001,24(2):270-277.
[37]Benson D A.A Gauss pseudospectral transcription for optimal control[D].Cambridge:Massachusetts Institute of Technology,2005.
[38]Tawfiqur R,Zhou H,Sheng Y,et al.Trajectory optimization of hypersonic vehicle using Gauss pseudospectral method[J].Applied Mechanics and Materials,2012,110(1):5232-5239.
[39]任高峰,崔平远,崔祜涛,等.一种新型火星定点着陆轨迹快速优化方法[J].宇航学报,2013,34(4):464-472.Ren G F,Cui P Y,Cui H T,et al.A new method of rapid trajectory optimization for Mars pin-point landing[J].Journal of Astronautics,2013,34(4):464-472.
[40]Long J,Gao A,Cui P.Controllable set analysis for planetary landing under model uncertainties[J].Advances in Space Research,2015,56(2):281-292.
[41]Lantoine G,Braun R.Optimal trajectories for soft landing on asteroids[R].USA:Georgia Insti-tute of Technology,2006.
[42]Arora R K.Reentry trajectory optimization:evolutionary approach[C]//The 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization.Atlanta:AIAA,2002:4-6.
[43]Lafleur J M.Cerimele C J.Mars entry bank profile design for terminal state optimization[J].Journal of Spacecraft and Rockets,2011,48(6):1012-1024.
[44]Yu Z,Cui P,Gao A.A novel trajectory optimization method for Mars atmospheric entry[C]//66rd International Astronautical Congress.Jerusalem:[s.n.],2015 :12-16.
[45]Rahimi A,Kumar K D,Alighanbari H.Particle swarm optimization applied to spacecraft reentry trajectory[J].Journal of Guidance,Control,and Dynamics,2013,36(1):307-310.
[46]Yu Z,Zhao Z,Cui P.An observability-based trajectory optimization considering disturbance for atmospheric entry[C]//AIAA Guidance,Navigation,and Control Conference.San Diego:AIAA,2016:4-8.
[47]Hu H J,Zhu S Y,Cui P Y.Desensitized optimal trajectory for landing on small bodies with reduced landing error[J].Aerospace Science and Technology,2016,48:178-185.
[48]Evensen G.Sequential data assimilation with a nonlinear quasigeostrophic model using Monte Carlo methods to forecast error statistics[J].Journal of Geophysical Researc,1994(99):10143-10162.
[49]Whitaker J S,Hamill T M.Ensemble data assimilation without perturbed observations[J].Monthly Weather Review,2002(130):1913-1924.
[50]Gordon N J,Salmond D J,Smith A F M.Novel approach to nonlinear and non-Gaussian Bayesian state estimation[J].Proceedings of Radar and Signal Processing,1993,140(2):107-113.
[51]Arulampalam M,Maskell S,Gordon N,et al.A tutorial on particle filters for online nonlinear/ non-Gaussian Bayesian tracking[J].IEEE Transactions on Signal Processing,2002(50):174-188.
[52]Julier S J,Uhlmann J K,Durrant-Whyte H F.A new approach for filtering nonlinear system.Proceedings of the American Control Conference[C]//San Diego,CA:Institute of Electrical and Electronics Engineers,1999:1628-1632.
[53]Heyne M C.Spacecraft precision entry navigation using an adaptive sigma point Kalman filter bank[D].Austin TX:The University of Texas at Austin,2007.
[54]Pence B,Fathy H,Stein J.A maximum likelihood approach to recursive polynomial chaos parameter estimation[C]//Proceedings of the American Control Conference.Baltimore:Institute of Electrical and Electronics Engineers,2010,2144-2151.
[55]Li J,Xiu D,A generalized polynomial chaos based ensemble Kalman filter with high accuracy[J].Journal of Computational Physics,2009,228(15):5454-5469.
[56]Yu Z,Cui P,Ni M.A polynomial chaos based square-root Kalman filter for Mars entry navigation[J].Aerospace Science and Technology,2016(51):192-202.
[57]Wang L,Xia Y.Mars entry navigation with uncertain parameters based on desensitized extended Kalman filter[J].IEEE Transactions on Industrial Informatics,2015,11(5):998-1005.
[58]Lou T,Zhao L.Robust Mars atmospheric entry integrated navigation based on parameter sensitivity[J].Acta Astronautica,2015(119):60-70.
[59]Bharadwaj S,Rao A V,Mease K D.Entry trajectory tacking law via feedback linearization[J].Journal of Guidance,Control,and Dynamics,1998,21(5):726-732.
[60]Saraf A,Leavitt J A,Chen D T,et al.Design and evolution of an acceleration guidance algorithm for entry[J].Journal of Guidance,Control,and Dynamics,2004,41(6):986-995.
[61]Lu P.Regulation about time-varying trajectories:precision entry guidance illustrated[J].Journal of Guidance,Control,and Dynamics,1999,22(6):784-790.
[62]Cho N,Kim Y.Three-dimensional nonlinear differential geometric path-following guidance law[J].Journal of Guidance,Control,and Dynamics,2015,38(12):2366-2385.
[63]Xia Y,Chen R,Pu F,et al.Active disturbance rejection control for drag tracking in Mars entry guidance[J].Advances in Space Research,2014(53):853-861
[64]Powell R W.Numerical roll reversal predictor corrector aerocapture and precision landing guidance algorithm for the Mars Surveyor program 2001 missions[R].[S.l.]:AIAA ,1998.
[65]Joshi A,Sivan K.Predictor-corrector reentry guidance algorithm with path constraints for atmospheric entry vehicles[J].Journal of Guidance Control and Dynamics,2007,30(5):1307-1318.
[66]Brunner C W,Lu P.Skip entry trajectory planning and guidance[J].Journal of Guidance,Control,and Dynamics,2008,31(5):1210-1219.
[67]夏元清,沈刚辉,孙浩然,等.火星探测器进入段预测校正制导方法[J].深空探测学报,2015,2(4):338-344.Xia Y Q,Shen G H,Sun H R,et al.Mars entry guidance based on predicted corrector algorithm[J].Journal of Deep Space Exploration,2015,2(4):338-344.
[68]Kubota T,Otsuki M,Hashimoto T,et al.Touchdown dynamics for sampling in Hayabusa mission[C]//Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Keystone:AIAA,2006:2006-6539.
[69]Berry K,Sutter B,May A,et al.Osiris-REx touch-andgo(TAG)mission design and analysis[C]//36th Annual AAS Guidance and Control Conference.Breckenridg:AAS,2013:13-95.
[70]Ulamec S,Kucherenko V,Biele J,et al.Hopper concepts for small body landers[J].Advances in Space Research,2011,47(3):428-439.
[71]Sagdeev R Z,Zakharov A V.Brief history of the Phobos mission[J].Nature,1989,341(6243):581-585.
[72]Yoshimitsu T,Kubota T,Nakatani I,et al.Micro-hopping robot for asteroid exploration[J].Acta Astronautica,2003,52(2):441-446.
[73]Dietze C,Herrmann F,Kuß S,et al.Landing and mobility concept for the small asteroid lander MASCOT on asteroid 1999 JU3[C]// International Astronautical Congress.Iac Prague:[s.n.],2010.
[74]Pavone M,Castillo-Rogez J C,Nesnas I A D,et al.Spacecraft/rover hybrids for the exploration of small solar system bodies[C]//IEEE Aerospace Conference.Big Sky:IEEE,2013:2-9.
[75]Bellerose J,Scheeres D J.Dynamics and control for surface exploration of small bodies[C]//AIAA/AAS 2008 Astrodynamics Specialist Conference.Honolulu:AIAA,2008:2008-6251.
[76]Bellerose J,Girard A,Scheeres D J.Dynamics and control of surface exploration robots on asteroids[J].Lecture Notes in Control and Information Sciences,2009(381):135-150.
[77]Mège D,Gurgurewicz J,Grygorczuk J,et al.The highland terrain hopper(hopter):concept and use cases of a new locomotion system for the exploration of low gravity solar system bodies[J].Acta Astronautica,2016(121):200-220.
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68918910
E-mail:yuzhengshi@gmail.com
崔平远(1961- ),男,教授,博士生导师,主要研究方向:飞行器自主导航与控制、深空探测器自主技术与轨道设计。本文通讯作者。
通信地址:北京市海淀区中关村南大街5号,北京理工大学宇航学院(100081)
电话:(010)68918611
E-mail:cuipy@bit.edu.cn
Research Status and Developing Trend of the Autonomous Navigation, Guidance, and Control for Planetary Landing
YU Zhengshi1,2,3,CUI Pingyuan1,2,3
(1.Institute of Deep Space Exploration,Beijing Institute of Technology,Beijing 100081,China;2.Key Laboratory of Autonomous Navigation and Control for Deep Space Exploration,Ministry of Industry and Information Technology,Beijing 100081,China;3.Key Laboratory of Dynamics and Control of Flight Vehicle,Ministry of Education,Beijing 100081,China)
Autonomous navigation,guidance,and control is one of the key technologies for planetary landing,which has a direct impact on mission success.In this paper,the necessity and importance of the further research on the autonomous navigation,guidance,and control are elaborated focusing on the developing demand for the Mars and small body landing mission in the future.Based on the environment features,the challenges encountered for the autonomous navigation,guidance,and control are analyzed.Then and the key techniques involved are discussed,and the state-of-the-art techniques and research tendency of the autonomous navigation for planetary landing are summarized.Finally,the development trends of the autonomous navigation,guidance,and control for Chinese planetary landing mission in the future are previewed.
planetary landing;Mars;small body;autonomous navigation;guidance and control
V448.224
A
2095-7777(2016)04-0345-11
10.15982/j.issn.2095-7777.2016.04.006
于正湜,崔平远.行星着陆自主导航与制导控制研究现状与趋势[J].深空探测学报,2016,3(4):345-355.
Reference format:Yu Z S,Cui P Y.Research status and developing trend of the autonomous navigation, guidance, and control for planetary landing [J].Journal of Deep Space Exploration,2016,3(4):345-355.
于正湜(1987- ),男,博士后,主要研究方向:航天器自主导航与制导控制。
[责任编辑:高莎]
2016-07-28;
2016-08-10
国家重点基础研究发展计划(2012CB720000);国家自然科学基金资助项目(61374216,61304248,61304226);北京理工大学创新团队基金资助项目
猜你喜欢
太空探索(2020年10期)2020-10-22 03:59:40
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
百科探秘·航空航天(2019年4期)2019-06-11 05:43:07
百科探秘·航空航天(2019年5期)2019-06-06 01:38:54
读者(2018年20期)2018-09-27 02:44:48
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:56:27
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
