
太阳帆航天器的关键技术
2017-01-18 06:14:59胡海岩
深空探测学报 2016年4期
胡海岩
(北京理工大学宇航学院 飞行器动力学与控制教育部重点实验室,北京 100081)
太阳帆航天器的关键技术
胡海岩
(北京理工大学宇航学院 飞行器动力学与控制教育部重点实验室,北京 100081)
将太阳帆航天器所涉及的关键技术划分为4个方面:总体设计、轨道和姿态动力学与控制、太阳帆材料及其性能、太阳帆折叠与展开。针对每项关键技术,基于对国外长期研究结果进行分析并阐述主要技术特征,梳理国内相关研究进展,包括笔者与合作者的研究成果,分析存在的主要问题。根据上述分析,指出我国发展太阳帆航天器应该重视的若干问题。
太阳帆;薄膜;折叠;展开;轨道控制;姿态控制
0 引 言
太阳帆航天器通过阳光照射在大面积薄膜上的反射光压获得飞行动力,可实现长时间、小推力的加速飞行,对深空探测颇具吸引力。
美国、苏联、欧洲很早就启动了太阳帆航天器的有关技术研究。例如,1999年,欧洲航天局(ESA)和德国宇航中心(DLR)联合研制了边长为20 m的正方形太阳帆模型,并进行了地面模拟展开试验;2009年又进行了失重飞行条件下的太阳帆支撑桅杆模拟展开试验。但这些研究进展并不顺利,多次在地面或飞行搭载试验中出现问题,导致计划流产。
可喜的是,日本宇宙航空研究开发机构(JAXA)坚持富有自身特色的研究计划,并取得了突破性进展。2010年5月21日,JAXA利用H-2A运载火箭在种子岛航天中心成功发射了太阳帆演示航天器IKAROS(Interplanetary Kite-craft Accelerated by Radiation Of the Sun),以自旋方式展开了图1所示边长为14 m、厚度为7.5 μm的正方形太阳帆,通过太阳光压推动307 kg的航天器加速飞行,于当年12月8日进入金星轨道,成功实现了太阳帆航天器的星际飞行[1]。
此后不久,2011年1月20日,美国国家航空航天局(NASA)研制的Nano Sail-D在搭载发射两个月后从母星上弹出并成功展开。如图2所示,该太阳帆采用桅杆支撑厚度仅为2.0 μm的正方形帆面,帆面展开面积为9.29 m2,而展开过程仅耗时5 s[2]。
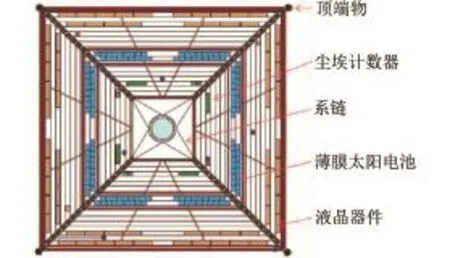
图1 JAXA研制的IKAROS太阳帆[1]Fig.1 Solar sail IKAROS designed by JAXA[1]

图2 NASA研制的Nano-Sail-D太阳帆[2]Fig.2 Nano-Sail-D designed by NASA[2]
这两个验证项目的成功坚定了航天界发展太阳帆航天器的信心,也使人们更加清晰地看到太阳帆航天器具有如下鲜明特点和技术需求:
1)太阳帆进入太空后才能展开,故需要特殊的折叠和展开技术;
2)太阳帆的面积大、重量轻、反射率高,故需要特殊的材料制备与性能保障技术;
3)太阳帆通过太阳光压获得的推力大小和方向与太阳帆到太阳的距离、太阳光入射角有关,由此引发特殊的航天器轨道和姿态动力学问题,故需要相应的控制技术;
4)太阳帆航天器是上述几项特殊技术的集成,故需要相应的总体设计技术。
本文将按照4)、3)、2)、1)的顺序概述上述关键技术的要点,介绍国内外研究进展,指出我国发展太阳帆航天器应重视的若干问题。与该领域已有研究综述所不同的是,本文的目的不是完整介绍已有研究进展,而是介绍对上述关键技术的特征分析,梳理国内研究现状和值得重视的问题,进而提出推进太阳帆航天器发展的观点。在介绍关键技术时,将按照各研究机构进行梳理,力求把握总体发展态势,避免过度关注枝节。
1 总体设计技术
1.1 国外研究概述
由于JAXA研制的IKAROS太阳帆航天器取得了成功,人们对其技术分析比较多[1,3]。事实上,美国、俄罗斯、欧洲在太阳帆航天器的总体方案和设计技术方面投入了许多力量,IKAROS航天器的设计是集大成之作。
与常规航天器相比,太阳帆航天器具有若干特点,在总体设计阶段需要重点关注这些特点所产生的如下技术问题。
1)任务目标设计方面。在明确探测目标的同时,需要研究采用太阳帆作为动力的必要性和可行性,以及利用太阳帆可能实现的转移轨道、转移时间、悬浮轨道、轨道周期等。
2)系统组成设计方面。在明确航天器平台、任务载荷的前提下,需要研究确定航天器整体构型、各部分重量;要根据太阳帆所提供的动力与太阳帆面积、重量之间的约束关系,研究确定太阳帆的重量、可望产生的动力;还要研究确定太阳帆构型、航天器质心与太阳光压心之间的距离、轨道控制和姿态控制模式。此外,需要结合太阳帆构型,为航天器有效载荷、轨道和姿态测控、通信等分系统设计太阳能电池、电能收集与分配系统。
3)飞行流程设计方面。根据对图3中的IKAROS太阳帆航天器的分析可知,确定太阳帆展开前的准备过程、展开过程、展开后的测控过程是研究的重点。准备阶段从航天器与运载火箭分离、通过速率阻尼消除分离扰动后开始,包括航天器姿态调整、捕获太阳、形成对日定向巡航姿态;展开过程取决于太阳帆的构型,本文5.1节将作详细阐述;展开后的测控过程包括将太阳帆面与太阳光线的角度调整至设计角度,测量太阳帆的工作状态、姿态控制、加速度增量等,并根据实际扰动进行微调。完成上述过程之后,航天器将依次进入地球逃逸轨道,星际航行轨道、捕获目标轨道、环绕目标轨道等。
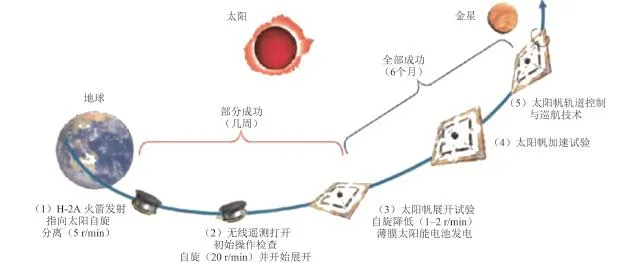
图3 IKAROS太阳帆航天器的飞行流程[1]Fig.3 Mission sequence of IKAROS[1]
4)在总体设计中,除了关注上述特点并获得优化设计,还要妥善协调各个分系统之间的矛盾,尤其是太阳帆分系统、平台结构与机构分系统、轨道和姿态控制等分系统之间的矛盾,力求全局最优。
除了深空探测之外,太阳帆航天器拥有广阔的应用前景,这导致其总体设计还包括更广泛的内容。例如,对于给地球带来潜在威胁的小行星,可以利用太阳帆航天器构造引力拖车,使小行星的轨道发生偏转[4]。小行星的不规则形状导致其周围的引力场很复杂,此时太阳帆航天器的轨道设计在总体设计中居突出地位。研究表明,对于一颗直径为320 m的小行星,采用总质量为2.5 t、太阳帆面积为1万 m2的航天器来实施引力拖动,8年后可使小行星轨道偏移30 km;若要产生更大的轨道偏移,则需要多个太阳帆航天器联合实施引力拖动,由此引发太阳帆航天器编队方面的总体设计问题。调整小行星轨道的另一思路是直接将太阳帆与小行星相附着,这也导致新的总体设计问题[5]。
1.2 国内研究进展
我国在太阳帆航天器总体设计方面尚处于起步阶段,航天领域的若干研究机构开展了太阳帆航天器方案论证和初步分析工作。例如,上海宇航系统研究所以水星探测为目标,进行了太阳帆航天器概念设计,提出选用边长为150 m的4桅杆正方形太阳帆,确定航天器总重量为250 kg,并对各分系统、飞行流程等进行了分析[6]。又如,中国科学院空间科学中心以20年内可飞行200 AU的星际探测器为目标,进行了太阳帆航天器概念设计,其初步方案是采用边长为160 m的正方形太阳帆,航天器总质量为280 kg,特征加速度小于1 mm/s2[7];该中心还分析了正方形太阳帆展开后的力学特性,尤其是预紧力与太阳帆力学特性的关系[8]。再如,中国空间技术研究院钱学森实验室开展了太阳帆构型选择研究,对正方形、圆形、叶形三种太阳帆在结构质量、转动惯量、光压力下的力学性能等方面进行了分析对比,认为4桅杆支撑的正方形太阳帆具有支撑方便、帆面简单、操控方便等优势[9]。
对于以深空探测为使命的太阳帆航天器,其总体设计比近地轨道的卫星设计复杂得多,方案设计阶段面临大量的数值仿真对比。我国航天研究机构在提出太阳帆航天器总体方案的同时,开展了快速数值仿真的研究,例如通过在卫星工具包(satellite tool kit,STK)中施加由MATLAB语言编写的嵌入式脚本,实现复杂航天任务方案的快速仿真[10]。
从上述研究看,我国在太阳帆航天器总体设计方面的研究积累和经验仍很少。所开展的总体设计研究尚处于方案论证阶段,个别方案得到了基于简化模型的数值仿真支持,但多数方案的关键技术尚未获得充分的数值仿真、物理或半物理仿真实验支撑。
2 轨道和姿态动力学与控制
2.1 国外研究概述
由于太阳帆接受的太阳光压力方向受到阳光方向限制,导致太阳帆航天器的轨道为非开普勒轨道。例如,当太阳帆的法线方向与太阳光方向的夹角保持不变时,太阳帆航天器的轨道呈现螺旋状。人们较早研究了太阳帆航天器从地球轨道到近日轨道的转移轨道,包括如何实现2个日心圆轨道之间的时间最优转移。人们还研究了太阳帆航天器进入日心轨道前如何逃逸地球引力场的策略,包括从地球高轨逃逸地球引力场的时间最优轨道,从地球低轨到月球轨道的转移轨道等。若不考虑太阳帆的太阳方向角、角速度约束等约束,将太阳光压力方向控制在沿轨道能量增加最快的方向,则逃逸轨道无疑接近时间最优逃逸轨道。
除了上述非周期转移轨道,若忽略其它行星对太阳帆航天器的引力,则太阳帆航天器在太阳光压力作用下可实现悬浮在黄道面上方或下方的周期轨道,即日心悬浮轨道。类似地,太阳帆航天器还能实现行星悬浮轨道。例如,只考虑地球引力和太阳光压力的作用,来实现地心悬浮轨道。
太阳帆航天器除了受到其它星体的引力之外,还受到与太阳帆姿态有关的太阳光压力,故其姿态动力学与控制研究对于任务实现极为重要[11-13]。目前,人们提出的太阳帆构型主要有正方形、圆形、叶形三类,均具有旋转对称性。因此,可通过自旋技术来控制太阳帆姿态,但只能实现单轴稳定。若要实现三轴稳定,则难度显著提升。因为太阳帆具有较大的转动惯量和太阳光压扰动力矩,采用传统飞轮难以实现其姿态控制,而采用喷气方法则需要大量的推进剂,受到航天器重量限制。
已有研究表明,对太阳帆航天器姿态控制可采用不消耗推进剂的节能方式[11]。例如,可通过调节任务载荷位置来改变航天器质心与太阳光压心的相对位置,进而改变太阳光压力矩;又如,可通过电机驱动安装在中心基座上的控制杆角度、调节固定在正方形太阳帆顶点处小帆的姿态等方式产生控制力矩;还可以将这些策略相互组合。但上述方法只能控制姿态平衡位置附近的扰动,当姿态远离平衡位置时,则需用其它手段,如采用等离子推进方式进行姿态控制。学者们详细讨论了不同姿态控制策略的实现方法,并通过地球椭圆轨道上太阳帆姿态控制算例验证了各控制策略的可行性[12-13]。
值得指出的是,IKAROS太阳帆航天器的姿态控制非常巧妙:在太阳帆边缘处覆盖若干薄膜型液晶元件,通过改变薄膜型液晶元件的接入电压,可使液晶元件对阳光的反射率及透射率发生变化,进而改变太阳帆边缘受到的光压分布,产生所需的光压姿态控制力矩[1,3]。
2.2 国内研究进展
相对于太阳帆航天器的其它几项关键技术,国内航天界对轨道和姿态动力学与控制的研究起步最早,研究单位也最多,包括清华大学、哈尔滨工业大学、中国科学院空间科学中心、北京航空航天大学、北京理工大学等,其中前3个单位的研究结果较为丰富。
清华大学在国内率先研究太阳帆航天器的轨道和姿态动力学,取得不少进展。早期研究包括:针对轨道与姿态耦合情况,给出太阳帆航天器在轨道和姿态相互耦合条件下的周期轨道稳定性条件;提出太阳帆航天器编队飞行概念,研究了在控制能力范围内的直线编队和圆形编队控制策略;研究了对多个太阳帆航天器进行编队控制,在小行星附近的悬浮轨道上形成一组引力拖车[14]。近期研究包括:在轨道动力学方面,提出沿逆向轨道逃离太阳引力场的可行域求解方法、日心光压加速轨道的设计[15];在轨道动力学控制方面,分析了太阳帆航天器在地月拉格朗日L2点附近的轨道动力学[16],提出在小行星附近通过调节太阳帆面的光反射率实现日-星旋转系的面外平衡[17];在姿态控制方面,研究通过调节自旋太阳帆质心沿着对称轴的位置,实现姿态机动控制[18]。
哈尔滨工业大学在太阳帆航天器轨道和姿态动力学控制中也取得若干进展。在轨道设计与控制方面,以水星探测任务为背景,提出了水星太阳同步轨道的初步设计方法[19],给出一种面内外轨道分段捕获策略,使太阳帆航天器行星捕获终端轨道要素可同时满足目标工作轨道的要求[20];以地球-日地拉格朗日L1点-金星及地球-金星-水星任务为例,对太阳帆多任务深空探测轨道进行了全程优化设计,指出太阳帆推进相比传统化学推进具有明显优势[19]。在姿态控制方面,对太阳帆航天器进行刚柔耦合动力学建模,针对质心/压心偏差而致的常值干扰力矩,采用线性二次型调节器(linear quadratic regulator,LQR)和最优PI控制进行了太阳帆航天器姿态和振动控制器设计,可实现常值干扰力矩作用下稳态无差的三轴姿态控制效果[21]。
中国科学院空间科学中心的已有研究侧重于太阳帆航天器轨道设计。例如,从高斯(Gauss)形式的太阳帆航天器密切轨道微分方程出发,以太阳极轨射电成像仪计划为例,研究了轨道设计方法[22];建立太阳帆航天器在日心悬浮轨道上实现定点悬浮的条件,给出了其转移轨道设计方案[23];考虑太阳帆褶皱和鼓起对光压模型的修正、地球遮挡等非理想因素,研究了它们对太阳帆航天器逃逸轨道和逃逸时间的影响[24]。
从上述研究看,我国在太阳帆航天器轨道和姿态动力学与控制研究方面,尚处于根据个别预研需求或国外文献进行选题的阶段,已有的研究内容比较零散;所开展的研究均属于方法研究和数值仿真,尚未见有物理或半物理仿真实验。此外,已有研究所考虑的非理想因素主要来自国外文献,研究的实效性尚需全面验证。
3 太阳帆材料及其性能
3.1 国外研究概述
太阳帆一般采用厚度8 μm以下的PI超薄膜,其典型代表是图4所示的JAXA为IKAROS航天器所研制的ISAS-TPI®热塑性PI薄膜,其厚度为7.5 μm。该薄膜已经过空间飞行验证,表现出良好的空间环境稳定性[25]。目前,JAXA正在开展厚度为2~3 μm的ISAS-TPI®超薄膜的研制,以便满足未来研制更大尺寸太阳帆的需求。为了使太阳帆能高效反射阳光进而获得光压推进,一般对PI薄膜镀铝,如图5所示。此外,还应对薄膜进行工艺加强,防止折叠褶皱引起的破损等。

图4 日本JAXA研制的ISAS-TPI®薄膜[25]Fig.4 ISAS-TPI membrane manufactured by JAXA[25]

图5 太阳帆镀铝正面、未镀铝反面[1]Fig.5 Front/back side of the solar sail plated w/o aluminum[1]
太阳帆材料不仅要有优良的力学性能,还要能经受太空中的高低温变化和各种辐照[26-27]。NASA曾对太阳帆候选材料进行电子辐照耐受性试验,发现美国杜邦公司(Dupont)研制并镀铝的聚酰亚胺(PI)薄膜在95 keV电子辐照能量和辐照总通量约为706 Mrad的条件下性能无显著变化,而镀铝的聚酯薄膜Mylar则发生显著变化。这表明PI薄膜比Mylar薄膜更适宜于制造太阳帆[28]。模拟空间环境下的地面实验则表明,导致PI薄膜力学性能退化的主要因素是原子氧,而紫外线等是次要因素[29]。总体来看,PI薄膜具有良好的耐高低温性能、耐辐照性能、力学性能、介电性能,是目前制作太阳帆的最佳材料。2012年,PI薄膜的欧洲市场价格约为每千克745美元,但宇航用高端品种对我国禁售。
值得指出,不同牌号的PI薄膜性能有差异,各有所长。例如,Dupont研制的Kapton薄膜和日本钟渊化工公司(Kaneka)研制的Apical薄膜都属于芳族PI薄膜,它们的空间环境稳定性好,耐紫外辐照和质子辐照性能好,但材料拼接时需要使用胶黏剂,而胶黏剂在太空中会出现性能下降的问题;JAXA研制的ISASTPI则耐电子辐照性能好,能进行热封而免去胶黏,但是玻璃化温度远低于Apical,机械性能也比Apical要差些[25]。因此,JAXA在IKAROS太阳帆上同时采用Apical薄膜和ISAS-TPI®薄膜,对其进行了太空综合考核[1]。
在研制太阳帆过程中,还需要根据不同的展开方式选用恰当的支撑材料。对于支撑桅杆,目前多采用碳纤维复合材料;对于自旋展开方式,则需要聚酰亚胺类的绳索类材料。
3.2 国内研究进展
自IKAROS太阳帆航天器发射成功之后,我国学者开始关注太阳帆材料研究,基于国外信息较为细致地分析了太阳帆材料的选用[30-31]。与此同时,中国科学院化学研究所与企业合作,研制出厚度为7.5~10 μm的标准型PI超薄膜(基于均苯四甲酸二酐与二氨基二苯醚),掌握了薄膜厚度控制技术[32]。在此基础上,已开展了上述材料的抗原子氧、耐质子辐照和电子辐照等性能研究,但尚未实现批量化生产。
与此同时,北京卫星环境工程研究所等单位选用来自国外的25 μm厚的均苯型PI薄膜,研究了其在空间辐照环境下的性能演变。通过热重分析、X射线光电子能谱(XPS)分析等微观测试手段,对空间近紫外辐射环境下的薄膜力学性能演化与机理进行了研究[33],发现其抗拉强度和断裂伸长率均随着近紫外曝辐量增加而先降低、后增加,然后趋于稳定;同时,通过钴源辐照,研究了聚酰亚胺薄膜在γ射线辐照下的力学性能退化规律[34]。
从上述研究看,我国在太阳帆材料方面的研究单位很少,研究力量单薄,研究进展明显滞后于其它3项关键技术,迫切需要开展研究院所、材料企业的协同创新和产业化推进。
4 太阳帆折叠与展开
4.1 国外研究概述
太阳帆薄膜的厚度仅几微米,而面积则有数百平方米,其折叠方式对太阳帆能否在太空中顺利展开具有重要影响。对于方形太阳帆,国外学者提出以下3种折叠方式:即1985年由Miura和Natori共同设计的Miura-ori折叠方式[35],2002年由Guest和Defocatiis基于仿生学的单叶折叠结构提出的叶内折叠方式和叶外折叠方式[36],分别如图6(a)、6(b)和6(c)所示。JAXA研制IKAROS太阳帆时,采用了叶内折叠方式。
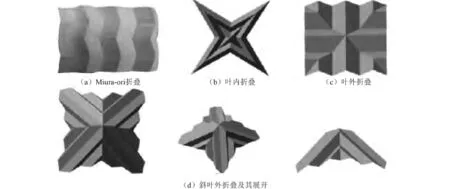
图6 太阳帆薄膜的几种折叠方式[35-36]Fig.6 Folding patterns of the solar sail membrane[35-36]
太阳帆的主要展开方式有2类:一类如图2所示,靠4根桅杆展开并由其维持构型;另一类如图7所示,靠自旋展开并由离心力维持构型;现分别进行介绍。
桅杆展开的第1种形式是刚性可卷曲桅杆:采用碳纤维材料制作可卷曲桅杆,将其作为太阳帆薄膜的支撑。航天器发射前,将桅杆卷曲后与折叠好的太阳帆共同安放在容器中;进入太空展开时,先释放桅杆,使其利用自身弹性缓慢地从容器中弹出;待其完全展开后,启动电机驱动帆索,帆索绕过桅杆外端的滑轮,将太阳帆薄膜从压缩状态缓慢拉出,直至太阳帆面张紧为止。
桅杆展开的第2种形式是充气膨胀桅杆:采用碳纤维增强复合材料制作可弯曲折叠的软管,将其作为太阳帆薄膜的支撑。航天器发射前,将空瘪的桅杆和折叠好的太阳帆共同安放在容器中;进入太空展开时,通过对软管充气使其膨胀,在其膨胀展开的同时带动薄膜展开;完成展开后对软管材料进行刚化处理,使其在漏气条件下仍能维持太阳帆构型。
在这2种桅杆展开方式中,充气展开桅杆比刚性可卷曲桅杆的重量轻许多,成为近年来国际航天界研究的热点。例如,德国DLR设计并实现了采用4根充气膨胀桅杆展开面积为200 m2的太阳帆。其中,充气膨胀桅杆是壁厚小于10 μm的复合材料软管,长度达到14 m。

图7 IKAROS太阳帆自旋展开过程分解[38]Fig.7 The first and second deployment processes of the IKAROS solar sail[38]
航天结构自旋展开的概念已有50多年历史,美国、俄罗斯已对大型航天结构自旋展开技术进行了多年研究。1993年,俄罗斯在太空进行Znamya-2实验时,用电机驱动和反作用飞轮配合,成功展开了一个直径20 m、由6片扇面组成的反射器[37];但此后尝试展开更大直径的反射器未能获得成功。与相对刚硬的反射器比,太阳帆自旋展开要困难得多。
2010年,JAXA研制的IKAROS太阳帆航天器首次实现了大面积薄膜的太空展开。该太阳帆展开分为图7所示的两个阶段[38]:第一阶段从太阳帆缓慢自旋开始到逐渐加速,将太阳帆四个角上的集中质量甩出;第二阶段解除薄膜限制,由集中质量产生的离心力将薄膜展开。从上述展开过程看,太阳帆薄膜自旋展开的难度比较大。例如,大面积薄膜容易发生过大的面外运动而损坏,也容易发生整体螺旋缠绕,致使展开失败。为了避免这些问题,JAXA曾尝试建立太阳帆薄膜结构的动力学模型,通过数值仿真来把握其展开规律[38]。
由于薄膜结构经历大范围转动、大变形和褶皱的相互耦合,其动力学模拟是非常困难的强非线性问题。因此,各国航天机构在研制太阳帆过程中均进行了大量展开试验。例如,NASA曾将边长为10 m和20 m的正方形太阳帆分别置于Glenn研究中心的巨型热真空罐中,进行了展开试验[39-40]。JAXA则进行了多次模拟太空环境的太阳帆展开试验,包括2004年在120 km亚轨道上进行的微重力环境下展开试验,2009年在40 km高空用气球悬挂进行的稀薄空气中展开试验[41]。
以上2种展开方式各有利弊,表1从6个不同的角度对它们进行了比较[3]。过去,航天界普遍认为自旋展开技术复杂,但JAXA取得的成功令人们重新审视了这个问题。
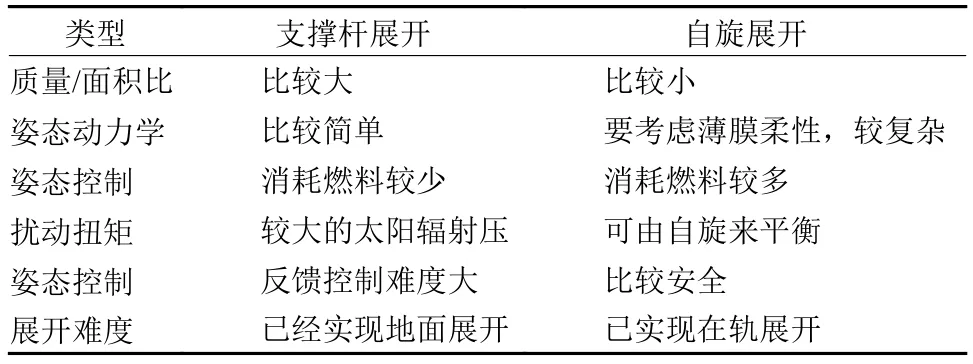
表1 两种太阳帆展开方式的对比Table 1 The comparison of two types of deployable solar sails
4.2 国内研究进展
中国空间技术研究院钱学森实验室对太阳帆薄膜的折叠方式进行了研究,在叶内折叠、叶外折叠方式的基础上,提出了图6(d)所示的斜叶外折叠方式,并用有限元法对叶内折叠、叶外折叠、斜叶外折叠的展开过程分别进行力学分析,证明了斜叶外折叠方式是较适合空间应用的折叠方式。如果增加折叠宽度,将使太阳帆展开时的薄膜应力显著降低[42]。
哈尔滨工业大学致力于研究桅杆支撑的太阳帆结构展开技术,设计了一种充气展开太阳帆,并研制了8 m × 8 m的原理样机。该太阳帆由4根可充气桅杆、4个三角形柔性薄膜,以及中心体所组成。充气桅杆初始时卷曲折叠,固定端与中心体连接并可充气。薄膜帆面经Z形折叠后分别紧密地卷曲缠绕在4根卷曲桅杆周围,折叠收拢后包装在圆柱体内。在保持充气流量恒定的条件下,4根卷曲桅杆由内压剥离层间的粘扣阻力,实现了有序平稳展开;各桅杆的卷轴两端同步拉动柔性薄膜,完全展开帆面。充气展开成型后,由4根纤维复合材料薄壳增强条产生结构自支撑作用,提供结构刚度[43]。
北京理工大学致力于研究太阳帆自旋展开技术。对于图7所示太阳帆自旋展开过程的第一阶段,将太阳帆系统简化为4根端部系有集中质量的旋转绳索,通过数值仿真得到绳索与中心毂轮法向的夹角与毂轮相对转速的关系,为太阳帆结构设计与地面模拟试验提供了参考[44]。对于图7所示太阳帆自旋展开过程的第二阶段,提出一套基于绝对节点坐标描述(ANCF)的太阳帆薄膜结构动力学建模和并行计算方法,可有效模拟图8中的大面积薄膜经历大范围转动、大变形和褶皱相互耦合的多柔体非线性动力学行为[45]。在此基础上,对图9中的IKAROS太阳帆展开过程的第二阶段进行了数值模拟[46],分析了薄膜材料的粘弹性阻尼特性对太阳帆展开动力学特性的影响[47]。
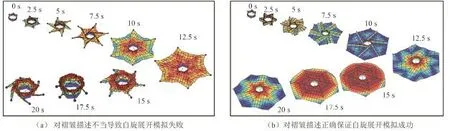
图8 基于绝对节点坐标描述的六边形太阳帆自旋展开动力学模拟[45]Fig.8 Deployment simulation of a spinning solar sail with a hexagonal membrane via ANCF[45]
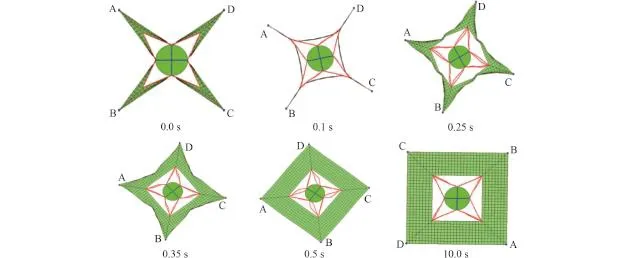
图9 IKAROS太阳帆缩比模型自旋展开过程的第2阶段数值仿真[46]Fig.9 Deployment simulation of the second stage of the scaled IKAROS solar sail[46]
在此基础上,北京理工大学研制了缩比的IKAROS太阳帆模型和图10所示的自旋展开实验系统,在图11所示的真空环境下进行了多种太阳帆缩比模型自旋展开动力学试验,图12的试验结果与图9的数值模拟结果定性吻合,并且提供了太阳帆自旋展开的动力学规律,为研制大型太阳帆提供了有效的自旋展开动力学建模和地面展开仿真技术[48]。
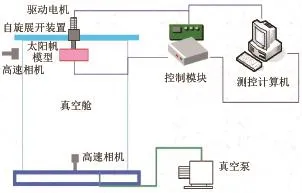
图10 IKAROS太阳帆缩比模型自旋展开实验系统[48]Fig.10 The spinning deployment experiment of the scaled IKAROS solar sail[48]

图11 真空罐及自旋装置[48]Fig.11 The vacuum tank and spinning device[48]
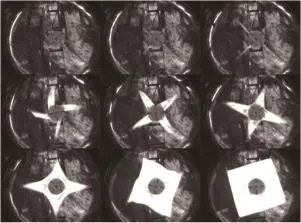
图12 IKAROS太阳帆缩比模型的自旋展开实验结果[48]Fig.12 The experimental deployment process of the scaled IKAROS solar sail[48]
5 结束语
进入新世纪以来,航天界对太阳帆航天器日益重视,仅EI Compendex数据库收录的论文就有1 630篇。更为重要的是,2010年JAXA研制的太阳帆航天器IKAROS成功实现太空飞行,将太阳帆航天器从梦想变为现实,进一步激发了航天界对太阳帆航天器的研究热情,仅关于IKAROS航天器技术特征分析等方面的论文就多达上百篇。与此同时,航天界也在探索中认识到太阳帆航天器发展所涉及的许多关键技术尚不成熟,甚至是研究难题。例如,NASA曾启动Sunjammer计划,研制展开面积达1 200 m2的太阳帆航天器,但研究进展很不顺利,导致计划暂时中止。
我国航天界虽然密切关注美国、日本等国在太阳帆航天器技术方面的发展,但真正起步研究的时间很短。近年来,国家自然科学基金资助了10余项关于太阳帆航天器的应用基础研究,包括太阳帆航天器的悬浮拟周期轨道控制、考虑几何非线性的太阳帆轨道和姿态控制、太阳帆自旋展开控制、太阳帆展开后残余振动抑制、光压与力热多场耦合条件下的太阳帆薄膜稳定性等方面的研究。迄今,我国发表的中文论文虽有百余篇,但其中不少属于对国外技术发展的科普性介绍,还有不少属于跟踪性研究。
在太阳帆航天器的几项关键技术中,我国航天界的研究始于轨道和姿态控制,但主要是理论分析和数值仿真。近年来,虽然已在国际航天主流期刊持续发表论文,但尚未见有物理或半物理仿真实验。近年来,部分高校和研究机构开始研究太阳帆薄膜材料制备、薄膜折叠和展开技术,已取得若干阶段性进展,但尚未进行充分的实验验证,距离工程化有较大距离。若干航天研究院所已开始关注太阳帆航天器的总体方案,在消化国外技术基础上提出了一些概念设计,但数值仿真等后继工作不够充分。从总体上看,上述研究大多属于跟踪性研究,研究成果的创新性不足。
作者认为,JAXA长期坚持富有本国特色的研究,仅用15亿日元(约合人民币1亿元)经费就完成了IKAROS太阳帆航天器的研制任务,其成功经验值得借鉴。分析IKAROS航天器的技术特点,可将JAXA的成功经验归纳为以下三点:
1)勇于技术创新。例如,JAXA在美国、欧洲均研制桅杆展开太阳帆的同时,敢于走自己的路,提出并成功实现了太阳帆自旋展开技术。
2)重视技术基础。例如,JAXA高度重视对薄膜材料的技术攻关,通过国际合作攻克了PI薄膜的制备技术,自行研制了优质的ISAS-TPI®热塑性PI薄膜。
3)重视初样验证。例如,JAXA为了确保IKAROS太阳帆在太空成功展开,在初样研究阶段多次在高空、亚轨道上模拟太空环境进行自旋展开试验,积累了重要的试验数据和丰富的试验经验。
因此,我国航天界要走自主创新和协同创新之路,才能在太阳帆航天器研究中有所作为。建议由航天研究院所提出可能的目标任务,相关高校、研究机构围绕太阳帆材料制备、帆面折叠和展开、航天器轨道和姿态动力学控制等关键技术开展更有针对性的一体化研究,通过相互合作,通过关键技术的突破来催生创新性的总体设计,将富有中国特色的太阳帆航天器送入深空。
[1]Tsuda Y,Mori O,Funase R,et al.Achievement of IKAROS -Japanese deep space solar sail demonstration mission[J].Acta Astronautica,2013,88(1): 183-188.
[2]Johnson L,Whorton M,Heaton A.Nano sail-d: a solar sail demonstration mission[J].Acta Astronautica,2011,68(5-6): 571-575.
[3]沈自才,张帆,赵春晴,等.IKAROS太阳帆的关键技术分析与启示[J].航天器工程,2012,21(2): 101-107.Shen Z C,Zhang F,Zhao C Q,et al.Key technology analysis and enlightenment of IKAROS solar sail[J].Spacecraft Engineering,2012,21(2): 101-107.
[4]Wie B.Hovering Control of a solar sail gravity tractor spacecraft for asteroid deflection[C]//Proceedings of the 2007 Planetary Defense Conference.[S.l.]:[s.n.],2007,AAS-07-145.
[5]Gao Y T,Wu J Y.The optimal control for the tethered system formed by an asteroid and a solar sail,Advances in Space Research[J].2016,57: 1002-1014.
[6]宋斌,颜根廷,张化岚,等.太阳帆航天器系统初步设想[C]//中国宇航学会深空探测技术专业委员会第八届学术年会论文集.上海:CDSET,2011,51-58.
[7]钱航,郑建华,李明涛.星际探测太阳帆行星和太阳借力轨道全局优化[J].国防科技大学学报,2016,38(1): 137-142.Qian H,Zheng J H,Li M T.Global optimization of solar sail gravity assist and solar photonic assist trajectory for interstellar mission[J].Journal of National University of Defense Technology,2016,38(1): 137-142.
[8]马鑫,杨萱,郑建华,等.太阳帆柔性结构动力学仿真分析[J].空间控制技术与应用,2014,40(3): 36-46.Ma X,Yang X,Zheng J H,et al.Simulation and analysis for the flexible structure of solar sail spacecraft[J].Aerospace Contrd and Application,2014,40(3): 36-46.
[9]刘宇飞,荣思远,沈凡,等.太阳帆探测器构型选择研究[C]//中国宇航学会深空探测技术专业委员会第十届学术年会论文集.北京:CDSET,2013,51-58.
[10]钱航,郑建华,吴霞,等.太阳帆推进任务的快速仿真方法[J].空间控制技术与应用,2016,42(2): 8-13.Qian H,Zheng J H,Wu X,et al.Method of mission analysis for solar sail exploration based on STK[J].Aerospace Contrd and Application,2016,42(2): 8-13.
[11]Wie B.Solar Sail attitude control and dynamics,Part 1[J].Journal of Guidance,Control and Dynamics.2004,27(4): 526-535.
[12]Wie B.Solar Sail attitude control and dynamics,Part 2[J].Journal of Guidance,Control and Dynamics.2004,27(4): 536-544.
[13]韩艳铧,张震亚,贾杰.太阳帆航天器姿态控制技术综述[J].航天器环境工程,2013,30(6): 667-674.Han Y H,Zhang Z Y,Jia J.Review of attitude control techniques for solar spacecraft[J].Space Environment Engineering,2013,30(6): 667-674.
[14]龚胜平.太阳帆航天器动力学与控制研究[D].北京:清华大学,2009.
[15]曾祥远.深空探测太阳帆航天器新型轨道设计[D].北京:清华大学,2013.
[16]Gong S P,Li J F.Orbital motions of a solar sail around the L2 Earth-Moon libration point[J].Journal of Guidance,Control and Dynamics,2014,37(4),349-356.
[17]Gong S P,Li J F.Equilibria near asteroids for solar sails with reflection control devices[J].Astrophysics in Space Science,2015,355: 213-223
[18]Gong S P,Li J F.Optimal attitude maneuver of an axisymmetric spinning solar sail[J].IEEE Transactions on Aerospace and Electronic Systems,2016,51(2): 1462-1474.
[19]史晓宁.太阳帆深空探测轨道控制与优化方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[20]史晓宁,荣思远,白瑜亮.太阳帆航天器行星分段捕获控制方法研究[J].2016,上海航天,33(2): 87-93.Shi J N,Rong S Y,Bai Y L.Study on solar sail planet-centered segmented capture method[J].2016,Aerospace Shanghai,33(2): 87-93.
[21]刘家夫.复杂机构结构太阳帆航天器动力学建模与控制问题研究[D].哈尔滨:哈尔滨工业大学,2012.
[22]罗超,郑建华,高东.太阳帆航天器的轨道动力学和轨道控制研究[J].宇航学报,2009,30(6): 2111-2117.Luo C,Zheng J H,Gao D.Study on orbit dynamics and control of solar-sail spacecraft[J].Journal of Astronautics,2009,30(6): 2111-2117.
[23]罗超,郑建华.太阳帆日心定点悬浮转移轨道设计[J].航天器工程,2014,23(3): 12-17.Luo C,Zheng J H.Solar sail trajectory design for transferring heliocentric fixed displaced orbit[J].Spacecraft Engineering,2014,23(3): 12-17.
[24]钱航,郑建华,吴霞,等.非理想太阳帆受阴影影响的地球逃逸轨道探讨[J].航天器工程,2014,23(2): 19-23.Qian H,Zheng J H,Wu X,et al.Preliminary discussion on escape trajectories with shadow for nonideal solar sailing[J].Spacecraft Engineering,2014,23(2): 19-23.
[25]Yokota R,Miyauchi M.Development of heat sealable polyimide thin films with high space environmental Stability for Solar Sail IKAROS Membrane[C]//Protection of Materials and Structures from the Space Environment.Berlin: Springer-Verlag,2014:303-316.
[26]Ruth H P,Paiul A C.Advanced materials for space application[J].Acta Astronautica,2007,61(11-12): 1121-1129.
[27]Bryant R G,Seaman S T,Wilkie W K.Selection and manufacturing of membrane materials for solar sails[C]//Advances in Solar Sailing.2014.Berlin: Springer-Verlag,525-540.
[28]Albarado T L.Electron Exposure measurements of candidate solar sail materials[J].ASME Journal of Solar Energy Engineering,2005,127(1): 125-130.
[29]Shimamura H,Yamagata I.Degradation of mechanical properties of polyimide film exposed to space environment[J].Journal of Spacecraft and Rockets,2009,46(1): 15-21.
[30]黄小琦,王立,刘宇飞.太阳帆飞行器帆体结构材料选用分析[C]//中国宇航学会深空探测技术专业委员会第九届学术年会论文集.北京:CDSET,2012,1083-1091.
[31]陈罗婧,王沫,吕秋杰,等.国外太阳帆薄膜材料选择及帆面展开方式研究进展[J].空间电子技术,2015(3): 18-26.Chen L J,Wang M,Lv Q J,et al.Recent progress on solar sail membrane materials and deployment technology[J].Space Electronic Technology,2015,3: 18-26.
[32]刘金刚,倪洪江,高鸿,等.超薄聚酰亚胺薄膜研究与应用进展,航天器环境工程[J].2014,31(5): 470-475.Liu J G,Ni H J,Gao H,et al.Research and application of ultrathin polyimide films[J].Space Environment Engineering,2014,31(5): 470-475.
[33]沈自才,高鸿,牟永强.空间近紫外辐照聚酰亚胺薄膜力学性能演化机理[J].真空科学与技术学报,2016,36(4): 482-487.Chen Z C,Gao H,Mu Y Q,et al.Mechanism for changes in mechanical properties of polyimide membrane irradiated by near ultraviolet light[J].Chinese Journal of Vacuum Science and Technology,2016,36(4): 482-487.
[34]沈自才,郭亮,马子良,等.聚酰亚胺薄膜在γ射线辐照下的力学性能退化研究[J].航天器环境工程,2016,33(1): 100-104.Chen Z C,Guo L,Ma Z L,et al.Mechanical property degradation of polyimide film under gamma ray radiation[J].Space Environment Engineering,2016,33(1): 100-104.
[35]Miura K,Natori M.2-D Array experiment on bboard a space flyer unit[J].Space Solar Power Review,1985,5(4): 345-356.
[36]Defocatiis D S A,Guest S D.Deployable membranes designed from folding tree leaves[J].Philosophical Transaction of the Royal Society of London,Series A-Mathematical Physical and Engineering Sciences,2002,360(1791): 227-238.
[37]Melnikov V M,Koshelev V A.Large space structures formed by centrifugal Forces[J].Earth Space Institute Book Series 4,Amsterdam: Gordon and Breach,1998,21-61.
[38]Miyazaki Y,Shirasawa Y,Mori O,Sawada H.Finite element analysis of deployment of gossamer Space structure[C]//ECCOMAS Thematic Conference on Multibody Dynamics.Belgium:ECCOMAS,2011.
[39]Murphy D M,Macy B D,Gaspar J L.Demonstration of a 10-m solar sail system[C]//Proceedings of the 46th AIAA/ASME/ASCE/AHS/ ASC Structures,Structural Dynamics and Materials Conference.[S.l.]:AIAA,2004:AIAA 2004-1576.
[40]Murphy D M,McEachen M E,Macy B D,Gaspar J L.Demonstration of a 20-m solar sail system[C]//Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference.[S.l.]:AIAA,2005,AIAA-2005-2126.
[41]Shirasawa Y,Mori O,Sawada H,Imaizumi T,et al.Demonstration of solar sail deployment system using a high altitude balloon[C]//Proceedings of The 27thInternational Symposium on Space Technology and Science.[S.l.]:[s.n.],2009,2009-d-36.
[42]黄小琦,王立,刘宇飞,杨辰等,大型太阳帆薄膜折叠及展开过程数值分析[J].中国空间科学技术,2014,4:31-38.Huang X Q,Wang L,Liu Y F,et al.Numerical analysis on the deployment and folding process of large-scale solar sail membrane[J].Chinese Space Science and Technology,2014,4:31-38.
[43]卫剑征,谭惠丰,马瑞强,宋博,充气式展开太阳帆结构动力学特性分析及展开试验[C]//西安:空间结构展开学术会议文集,2014,33.
[44]周晓俊,霍倩,周春燕,基于ADAMS的太阳帆展开绳索的建模与仿真[J].计算机辅助工程,2015,22(S1): 194-197.Zhou X J,Huo Q,Zhou C Y.Modeling and simulation on solar sail deployment ropes based on Adams[J].Computer Aided Engineering,2015,22(S1): 194-197.
[45]Liu C,Tian Q,Yan D,Hu H Y.Dynamic analysis of membrane systems undergoing overall motions,large deformations and wrinkles via thin shell elements of ANCF[J].Computer Methods in Applied Mechanics and Engineering,2013,258(1): 81-95.
[46]Zhao J,Tian Q,Hu H Y.Deployment Dynamics of a simplified spinning IKAROS solar sail via Absolute Coordinate Based Method[J].Acta Mechanica Sinica,2013,29(1): 132-142.
[47]赵将,刘铖,田强,等.粘弹性薄膜太阳帆自旋展开动力学分析[J].力学学报,2013,45(5): 746-754.Zhao J,Liu C,Tian Q,et al.Dynamic analysis of spinning deployment of a solar sail composed of viscoelastic membranes[J].Chinese Journal of Theoretical and Applied Mechanics,2013,45(5): 746-754.
[48]周晓俊,周春燕,张兴新,等.太阳帆自旋展开动力学地面模拟试验研究[J].振动工程学报,2015,28(2): 175-182.Zhou X J,Zhou C Y,Zhang X X,et al.Ground simulation tests of spinning deployment dynamics of a solar sail[J].Journal of Vibration Engineering,2015,28(2): 175-182.
通信地址:北京市海淀区中关村南大街5号北京理工大学(100083)
电话:(010)68915536
E-mail:haiyan_hu@bit.edu.cn
Key Technologies of Solar Sail Spacecraft
HU Haiyan
(MOE Key Lab of Dynamics and Control of Flight Vehicles,School of Aerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
This article surveys the key technologies of solar sail spacecraft in the following four aspects,the global design,the orbit and altitude controls,the solar sail materials and their properties,and the folding and deployment of solar sails.For each aspect,the article summarizes the major contents and features according to the previous studies abroad and presents the recent advances in China,including the recent studies of the author’s laboratory.Based on the successful achievements and detailed analysis on open problems,the article addresses some important issues,which will receive more attention when China develops solar sail spacecraft.
solar sail;membrane;folding;deployment;orbit control;altitude control
V423
A
2095-7777(2016)04-0334-11
10.15982/j.issn2095-7777.2016.04.005
胡海岩.太阳帆航天器的关键技术[J].深空探测学报,2016,3(4):334-344.
Reference format:Hu H Y.Key technologies of solar sail spacecraft [J].Journal of Deep Space Exploration,2016,3(4):334-344.
胡海岩(1956- ),男,博士,博士生导师,中国科学院院士。主要研究方向:飞行器结构动力学与控制研究,在振动控制系统的稳定性与分岔、结构颤振主动抑制、纳尺度系统动力学等方面取得重要进展;获得国家自然科学奖二等奖,国家科技进步奖二等奖,何梁何利科学与技术进步奖;2007年当选中国科学院院士,2010年当选发展中国家科学院院士。
[责任编辑:高莎]
2016-09-01;
2016-09-15
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
阅读时代(2021年6期)2021-09-10 07:22:44
东方少年·快乐文学(2020年8期)2020-10-20 06:20:11
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
石油化工建设(2016年6期)2016-02-27 15:03:26
石油化工建设(2015年6期)2015-12-01 04:17:31
科学24小时(2015年4期)2015-09-10 07:22:44
太空探索(2015年5期)2015-07-12 12:52:30
