荔湾3-1组块浮托安装实船监测与数值模拟
2016-10-12 03:01杨立军
海洋工程 2016年4期
吴 骁,李 欣,杨立军,李 俊
(上海交通大学 海洋工程国家重点实验室 高新船舶与深海开发装备协同创新中心,上海 200240)
荔湾3-1组块浮托安装实船监测与数值模拟
吴 骁,李 欣,杨立军,李 俊
(上海交通大学 海洋工程国家重点实验室 高新船舶与深海开发装备协同创新中心,上海 200240)
目前海洋平台日趋集成化、模块化,重量和体积都逐渐增大,使得适合安装大型组块的浮托安装法得到飞速发展。介绍荔湾3-1大型导管架平台浮托安装中使用的实测技术,对驳船的运动监测和海洋环境监测等测量数据进行分析,分析结果被应用于指导整个浮托安装过程,保证浮托安装符合安全施工标准。对浮托安装载荷转移阶段采用数值计算方法进行作业过程模拟,将计算结果与实测结果进行对比分析,两者具有较好的相似性。
浮托安装;荔湾3-1;海洋平台;驳船;海洋环境监测
Abstract: Offshore platforms become increasingly integrated and modular with large weight and size. Floatover installation method which is more suitable for the installation of large topsides develops rapidly. This paper presents the field measurement techniques used in the floatover installation of the Liwan 3-1 mega topsides. The motion measurements of barge and the environmental field measurements, etc., were conducted to guide the entire floatover operation. The field measurement data ensured the floatover operation to be performed as rapidly as possible and coincident with safe practice. Numerical method is used to simulate the mating operation process, and the calculated results are compared with field measurement showing that they have the same pattern of changes.
Keywords: floatover installation; Liwan 3-1; offshore platforms; barge; environmental field measurements
最近十几年全球大型油气田的勘探实践表明,陆上油气资源已日渐枯竭,海洋石油产量、探明储量均超过陆上,随着全球原油需求的不断增长,海洋石油开发进程也逐步加快。海洋工程结构物是应用于海洋资源勘探与开发的结构物,其中钢质导管架平台是目前海上油田使用最为广泛的一种平台,使用水深一般小于300米,自1947年第一次被用在墨西哥湾6米水域以来,发展十分迅速,导管架平台具有整体性好、安全性高、结构简单和造价低等优点。
传统的导管架平台安装方法是吊装法,将导管架和上部结构在陆上预先建造好,用驳船或其他方式运到安装现场,先将导管架沉放到预定位置并打桩固定,再将上部结构吊装在导管架上焊接固定。但受到起吊能力、结构物尺寸等因素的限制,海上起重船有时无法完成吊装作业,可采用浮托安装法。浮托法相比于其他安装方法减少了海上作业时间,节约成本且适合大型或超大型组块安装。1997年,上部模块质量为46 000 t的Hibermia导管架平台在纽芬兰岛附近成功使用双体船浮托安装成功,是到目前为止最重的浮托安装作业[1]。
在以往的浮托安装作业过程中,对安装海域的海况环境主要依赖气象员的预报,对于现场情况无法得到实时数据,此外船体运动以及重要位置碰撞受力情况等都只有凭借现场施工人员的经验目测判断。实时监测系统可以在现场测量得到相关数据以便帮助施工作业人员更充分地了解现场情况,在荔湾3-1天然气综合处理平台26 000 t上层组块的整体浮托安装的过程中,成功应用了实测系统,监测系统保证了在南海深水恶劣海况下安全而且效率进行浮托安装,浮托安装现场如图1所示。
1 计算理论
1.1 坐标系与坐标转换
对于浮托安装实测,如图2建立三个右手笛卡尔坐标系,全球定位系统(global positioning system, GPS)和惯性导航系统(inertial navigation system, INS)分别在全局坐标系和局部坐标系下测量导管架平台的运动和加速度[2]。

图1 荔湾3-1导管架平台浮托安装现场图Fig. 1 Portside-bow view of barge with topsides
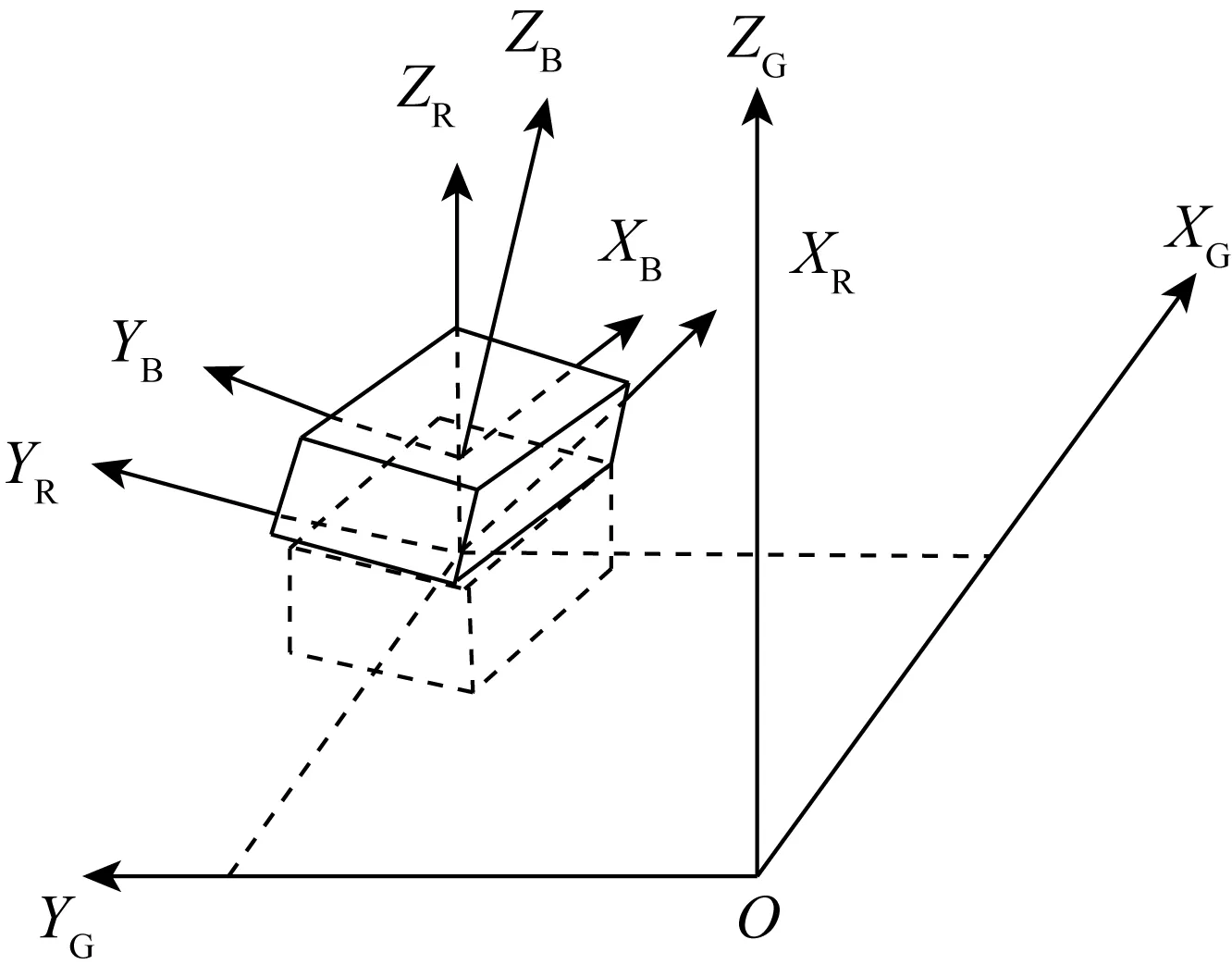
图2 运动坐标系Fig. 2 Coordinate system
全局坐标系O-XGYGZG:又称为大地坐标系,XOY平面与静水面一致,XYZ三个坐标轴分别指向地理东、北、天。局部坐标系O-XBYBZB:又称为船体坐标系,原点在船尾正中,X轴指向船首,Y轴指向左舷,XOY平面与上甲板重合。随船坐标系O-XRYRZR:随船坐标系初始时刻与船体固定坐标系重合,随后跟随驳船在水平面进行运动,XOY平面平行于静水面,驳船的波频运动在此坐标系中给出。
坐标转换矩阵:运动测量中的INS系统和GPS系统所使用的坐标系不同,因此所测得的数据需要在不同坐标系下进行转换,转换矩阵如下所示。其中,ψ为绕Z轴旋转角,即90°减去航向角;θ为绕Y轴旋转角,即俯仰角;φ为绕X轴旋转角,即横滚角;XG为大地坐标系下向量;Xb为船体坐标系下向量。
1.2 时域运动方程
基于牛顿第二定律,刚体在任意时刻的时域运动方程的一般形式可表示为:
(3)
式中:M和I是质量矩阵和转动惯量矩阵,f和m为外力和外力矩。 考虑到流体的影响,基于势流理论可得到
式中:A是附加质量矩阵,D是阻尼矩阵,K是恢复力矩阵,f和m分别包括一二阶波浪力、风力、流力和锚链力。
通过对频域水动力系数进行傅里叶变换,可将式(4)改写成
其中,卷积部分表示流体的延迟效应,R(t)是延迟函数,该函数只与湿表面几何形状有关。
2 实测研究
2.1 船舶运动监测
GPS系统是当前应用最广泛的卫星定位系统,但其在民用领域内定位精度只有10 m左右,为得到更高的定位精度,一般采用差分技术(DGPS),将一台GPS接收机安置在基准站上进行观测,通过载波相位差分技术(real time kinematic),将基准站采集的载波相位发送给用户接收机,进行求差解算坐标,该技术可使定位精度达到厘米级。INS系统具有数据更新率高、短期精度和稳定性好等优点,但由于导航信息经过积分而产生,其定位误差会随时间而增大,不适合长时间的测量。因此,文中对船体和组块六自由度运动采用DGPS/INS组合制导,从而消除与GPS观测值相关的系统误差和INS的积累误差,其结构示意如图3所示[3]。
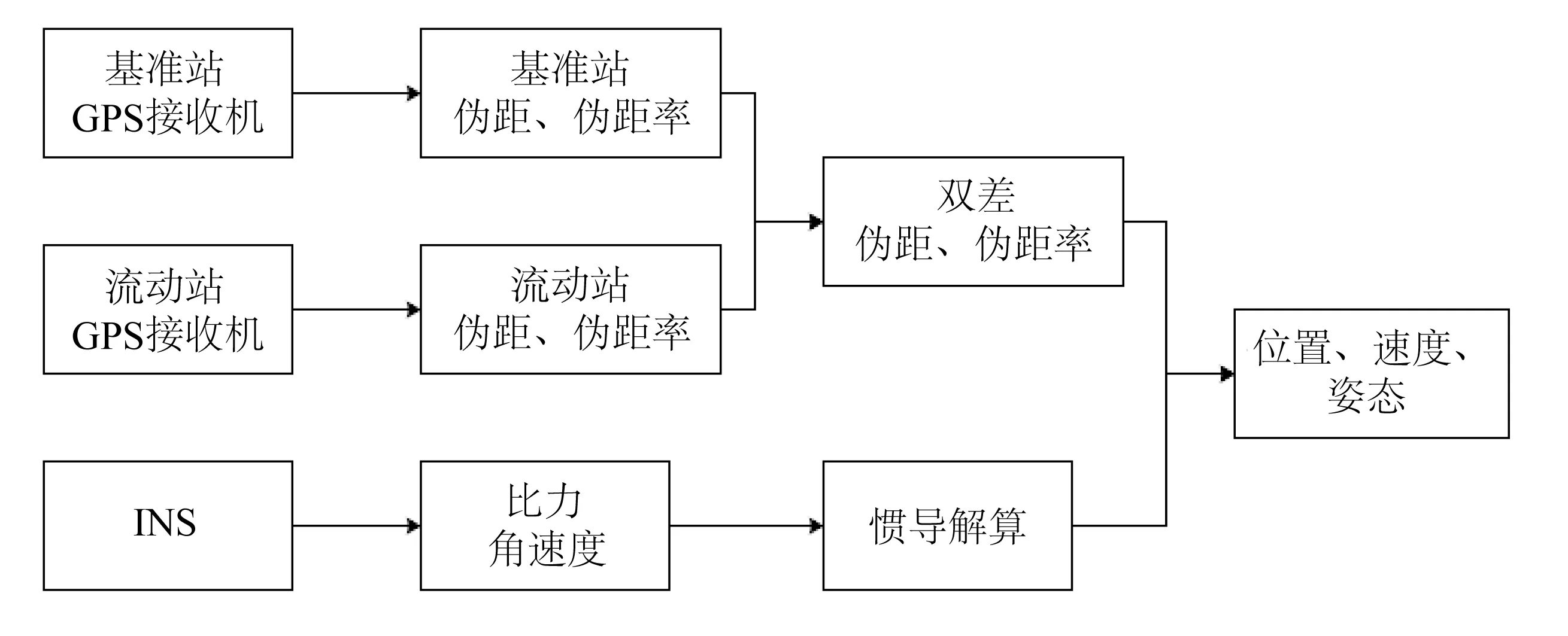
图3 DGPS/INS组合导航系统结构示意Fig. 3 Structure diagram of DGPS/INS
2.2 海洋环境监测
浮托安装过程对于现场的海况条件十分敏感和依赖,因此通过海洋环境监测得到可靠的海况数据是十分必要的,其中潮位的高低影响到浮托安装作业时间节点的安排,而风浪流的大小和方向则影响到驳船的运动响应。
风的监测包括风向和风速的测量,使用风杯式风速仪测量,它由风标测量风向,风杯的转速乘以系数后得到风速。
浪流的监测通过一台X波段航海雷达向海面发射雷达波,同时接受海面雷达回波,回波信息强度随位置的变化形成强弱相隔区域,通过数据处理雷达回波,经反演算法计算后得到海况信息[4]。
测波雷达对图像序列的处理主要采用三维傅里叶变换方法,其基本计算流程如图4所示。
首先将雷达回波图像序列I(x,y,t)进行三维离散傅里叶变换得到三维图像谱I(3)(kx,ky,ω),即


其中,MTF(k)=k-β,β是一个经验的系数,由海表面的成像机理决定。

图4 雷达图像处理流程图Fig. 4 Process of radar image
根据二维波数谱即可求得其他相应的动力学参数,将二维波数谱转换到频率-方向空间,即可得到二维海浪方向谱:
在方向上积分后便可得到波高谱:

2.3 潮位监测
浮托法安装更加依赖气候窗,在气候满足船舶作业条件下,进船退船过程中应至少满足一个潮汐周期。潮汐数据的测量是通过水下压力传感器获得的数据进行平均。静水压力与水深的关系[5]:
式中:P0是海面大气压力,g(h)是所处位置的重力加速度,ρ(h)是所处位置的海水密度,h是水深。
2.4 应力应变监测
使用光纤布拉格光栅(fiber bragg grating, FBG)传感器测量应变,光纤布拉格光栅是通过全息干涉法或者相位掩膜法来将一小段光敏感的光纤暴露在一个光强周期分布的光波下面,这样光纤的光折射率就会根据其被照射的光波强度而永久改变[6]。这种方法造成的光折射率的周期性变化就叫做光纤布拉格光栅。当一束广谱的光束被传播到光纤布拉格光栅的时候,光折射率被改变以后的每一小段光纤就只会反射一种特定波长的光波,这个波长称为布拉格波长,即λB=2neffΛ,其中,neff为光栅区的有效折射率,Λ为布拉格光栅的周期,如图5所示。
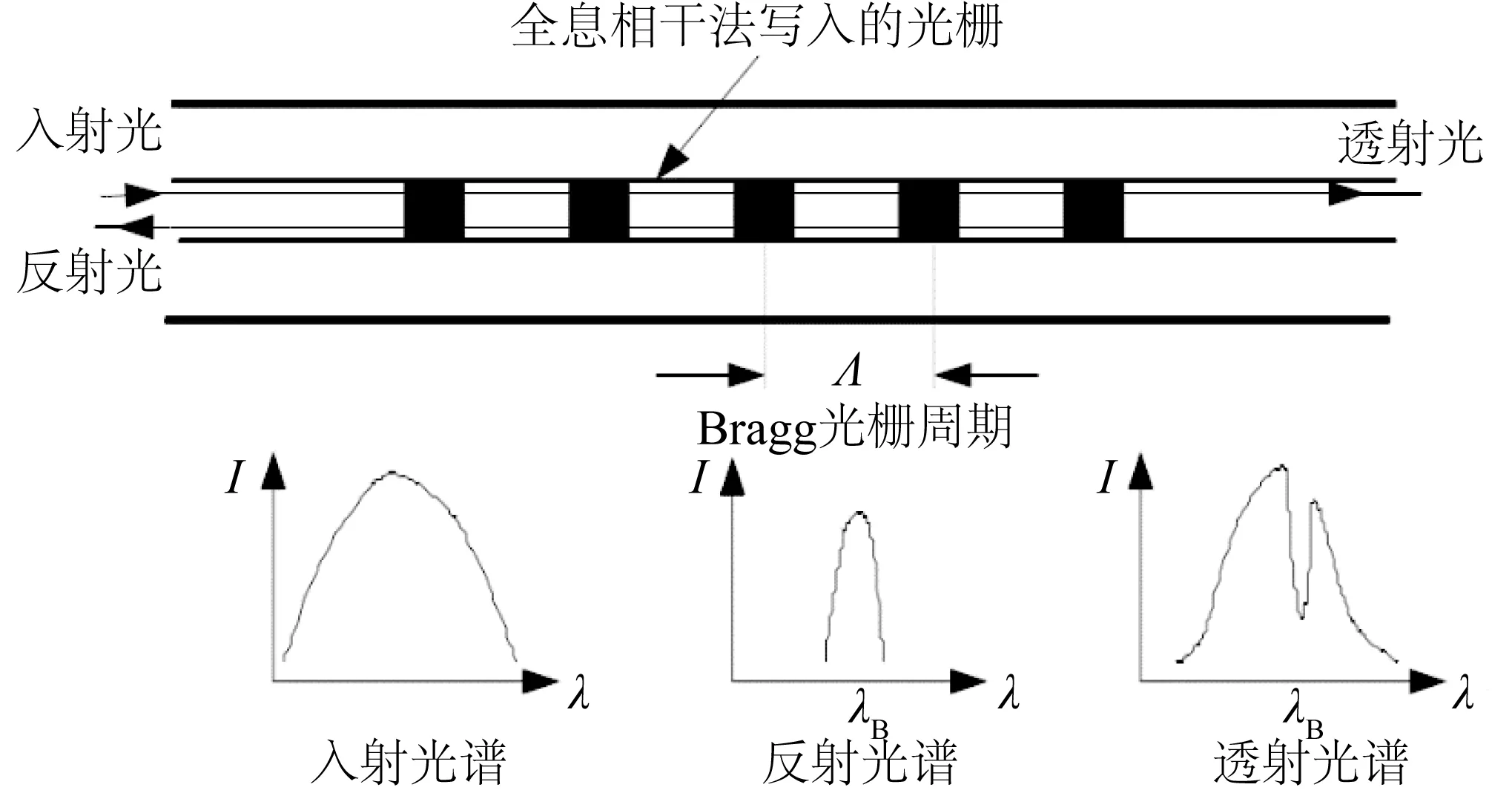
图5 光纤光栅传感原理Fig. 5 Principle diagram of fiber grating sensor
当有应变产生时,会引起光栅布拉格波长漂移,可表示为:
式中:ε为应变,kε为应变引起波长变化的灵敏度系数,Pe为光纤的弹光系数。
同样温度变化也会引起光栅布喇格波长漂移,其变化量可表示为[6]:
式中:α为光栅传感器的热膨胀系数,T为温度,KT为温度引起波长变化的灵敏度系数,ξ为光栅传感器的热光系数。
2.5 设备布置及数据采集
实测中GPS移动站安装在驳船上,GPS基准站安装在导管架附近的一座固定平台上。考虑到大型组块对风的遮挡,实测中风速仪安装位置尽量靠船尾,以减少组块对其的影响。测波雷达安装在上部组块上距离水面大约30 m处,以使其能够扫描到距船尾1 km的海域。潮位仪安装在导管架中的通海孔内,由于其连通器的作用,可将波浪过滤而得出实际潮位。光纤传感器均匀布置于船首护舷内侧肋板,通过光缆将信号传输至控制室,应变片表面涂有硅胶和防锈漆,防止其在拖航过程中受损。
数据在开始采集前对各个设备的系统时间进行同步,采集时将各数据集成至数据处理系统进行同步处理分析。
3 数据处理
3.1 运动数据
图6给出了5月22日至23日驳船重心处的横摇、纵摇、升沉的一分钟平均时例曲线,浮托安装时间节点如表1所示,驳船自20日进入安装区域等待,直到24日安装完成,浮托安装实施过程主要在22日和23日之间。

表1 荔湾3-1浮托安装时间表Tab. 1 Schedule of Liwan 3-1 floatover
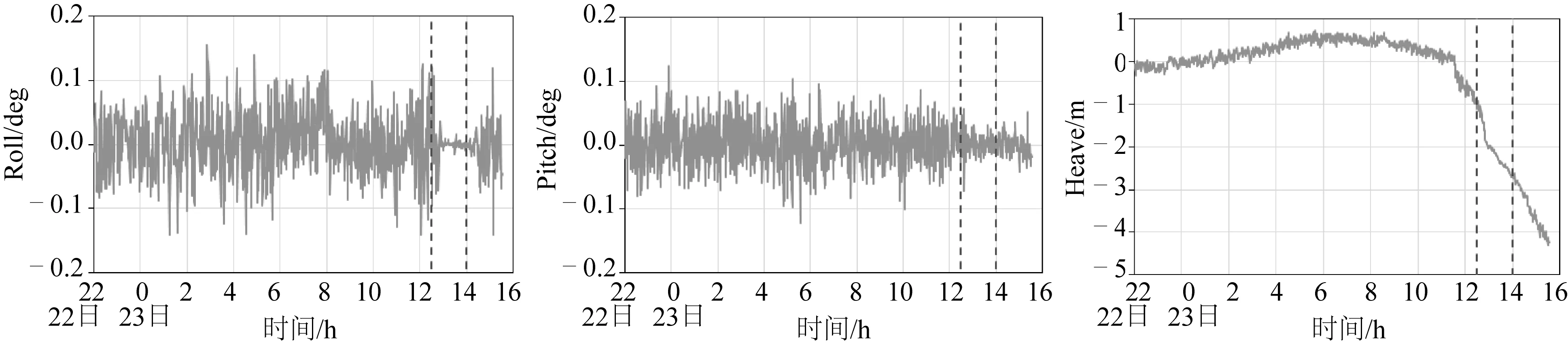
图6 驳船重心处的横摇、纵摇、升沉的一分钟平均时例曲线(虚线内为载荷转移阶段)Fig. 6 One minute average motions at COG of barge (mating stage inside dashed line)
从图6中可以看出,当有载荷开始发生转移后,由于桩腿对接缓冲单元(LMU)的作用,驳船的横摇和纵摇均明显减小。由于潮位下降的影响可以看到升沉运动有慢漂现象,大概每小时0.13 m,与潮位测量数据相符。选取驳船就位插尖对齐阶段30分钟运动数据进行谱分析,得到纵摇、横摇、升沉三个波频运动的频谱密度函数如图7所示。
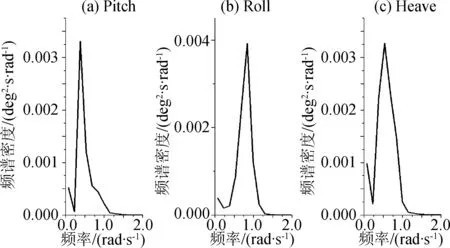
图7 波频运动频谱密度函数Fig. 7 Spectrum density functions of wave-frequency motions
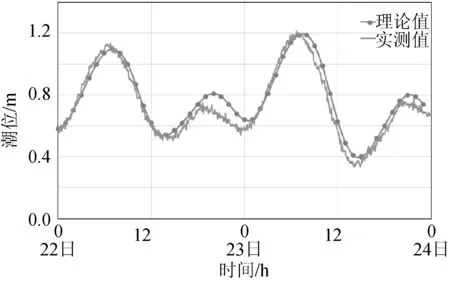
图8 潮位实测结果与理论值的对比Fig. 8 Comparison of tide levels
3.2 潮位数据
浮托安装阶段安装区域的潮位监测结果与天文预测的理论值如图8所示,潮位实测数据与理论值在时间和高度上基本保持一致,最大误差不超过0.1 m。从图8中可以看出23日的潮差比22日较大,且高潮位较高、地潮位较低,有利于浮托安装过程中利用潮汐将组块安装在导管架上。
3.3 风浪流数据
图9给出的是浮托安装阶段测量到的波浪数据,从图中可以看出有效波高最大达到2 m左右,在进船期间有效波高小于1.5 m,平均过零周期稳定在6 s左右。
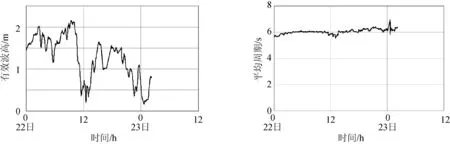
图9 波浪测量数据Fig. 9 Results of wave measurements
图10显示的是浮托安装期间驳船船尾处一分钟平均风速的曲线。在23日凌晨进船过程中,风速稳定在4~8 m/s之间,而最大平均风速大约为13 m/s,发生在22日20时。图11显示的是海洋表面流速,在系泊阶段流速在0.2 m/s附近,进船阶段流速有所增大,最大流速达到0.7 m/s。

图10 十分钟平均风速曲线Fig. 10 Time series of ten-minutes average wind speed

图11 流速曲线Fig. 11 Time series of current speed
3.4 应变数据
图12给出了通过光纤应变片测量得到的应变数据,图12(a)中数据为在23日9:15-9:25期间船首4个应变片所受应变,其中1~4号应变片最大应变分别为59 με、53 με、85 με、52 με。根据有限元计算,驳船护舷所受应变可以通过计算各个应变片应变之和得到,因此如12(b)所示,当时护舷所受最大应变为97 με,即约450 t压力。
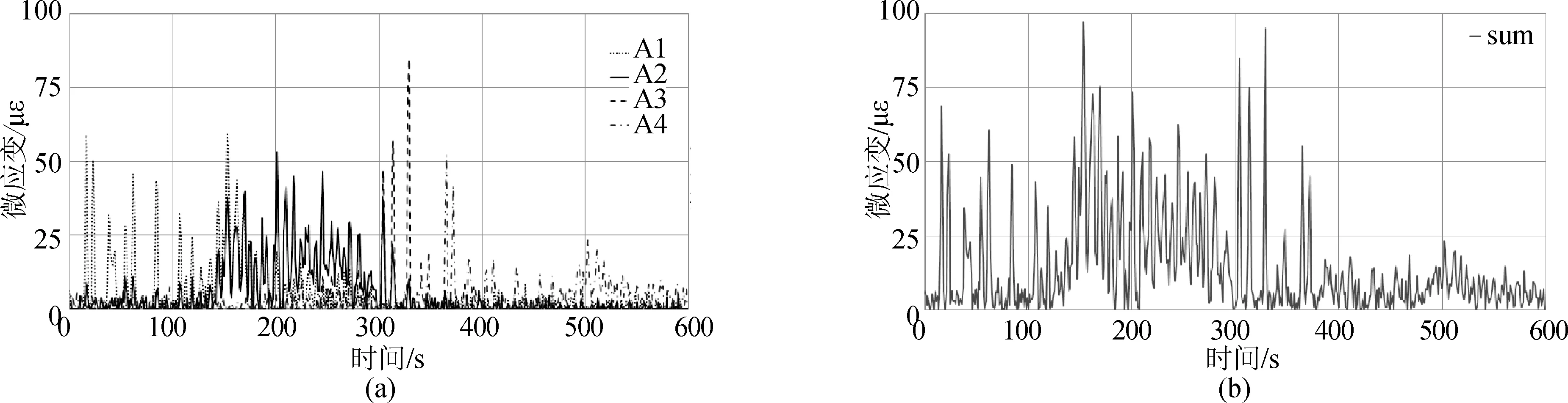
图12 应变测量数据Fig. 12 Time series of strains
4 数值模拟对比
以荔湾3-1浮托安装的载荷转移过程为例进行时域模拟,根据实测结果驳船在整个载荷转移过程中重心下降了4.1 m,环境条件选取有效波高1.2 m,谱峰周期7 s,浪向160°。驳船系泊系统有8根锚链组成,每根锚链由悬链线和钢缆组成,建立悬链线方程求解锚链端点的张力,使用弹簧模拟驳船护舷以及LMU。
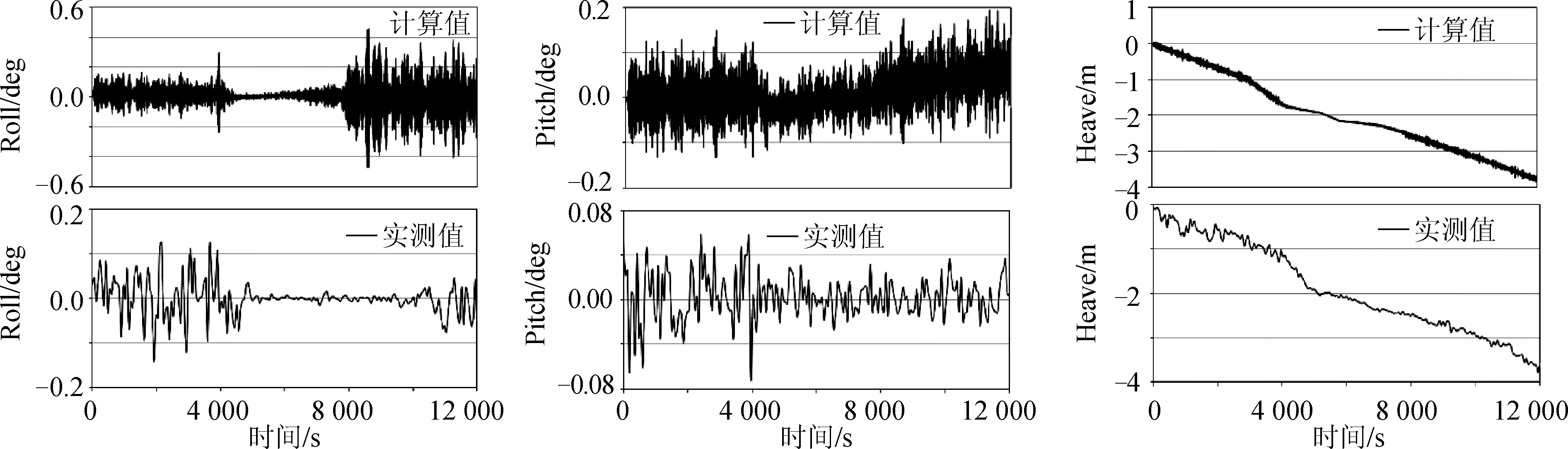
图13 载荷转移过程驳船运动结果对比Fig. 13 Comparison of barge motions in mating process
图13给出了载荷转移过程中横摇、纵摇、垂荡实测与数值计算结果的对比。从图中可以看出两者形状和变化趋势基本吻合,具有良好的相似性,驳船的六自由度运动随着载荷逐渐转移至导管架上呈减小的趋势,这阶段插尖和LMU之间的作用力限制了上部组块和驳船的六自由度运动。随着载荷的继续转移,组块对驳船的运动限制减小,驳船的六自由度运动再次增大,载荷转移之前和之后的运动幅值均比载荷转移过程中运动幅值较大。当载荷转移结束之后时,上部组块已经基本与导管架安装相连,此时驳船的六自由度运动幅值与载荷转移之前状态相比有所增大,表明当上部组块与驳船分离时,上部组块对驳船的运动限制减少。
4 结 语
对荔湾3-1浮托安装过程中进行实地监测,并对测量方法和数据分析手段进行了介绍,该实时监测系统对海上现场施工作业提供了有效帮助,对实测数据进行了分析,并与数值模拟结果进行了对比,得到以下结论:
1)运动监测系统可有效得到驳船的六自由度运动,对重心和插尖运动数据进行了分析,得到时域统计结果和谱分析结果,当载荷开始转移时,由于LMU的作用,驳船的横摇和纵摇均明显减小。
2)X波段测波雷达可有效测量施工海域的浪流信息,对波浪及海流进行分析,结合运动分析数据,对能否进行浮托安装提供重要依据。
3)潮位测量结果与天文预测的理论值吻合良好,可通过长期监测有效预报潮位。
4)通过对测量到的应变计算得到进船过程中靠垫受到了压力,护舷的最大受力为450 t。
5)对载荷转移阶段进行了数值模拟,其结果与实测结果具有较好的一致性。
[1] O’NEILL L A , FAKAS E, RONALDS B F. History, trends and evolution of float-over deck installation in open waters[C]//Proceedings of the SPE Annual Technical Conference and Exhibition, SPE63037. 2000.
[2] Marintecand Det Norske Veritas. Simulation of marine operations[S]. 2004.
[3] PETOVELLO M G. Real-time integration of a tactical-grade IMU and GPS for high-accuracy positioning and navigation[D]. Calgary: The University of Calgary, 2003.
[4] DANKERT H, HORSTMANN J, ROSENTHALl W. Wind- and wave-field measurements using marine X-band radar-image sequences[J]. IEEE Journal of Oceanic Engineering, 2005, 30(3):534-542.
[5] 盛振邦,刘应中. 船舶原理[M]. 上海:上海交通大学出版社, 2004.(SHEN Zhenbang, LIU Yingzhong. Practical ship hydrodynamics[M]. Shanghai: Shanghai Jiao Tong University Press, 2014.(in Chinese))
[6] 饶云江,王义平,朱涛. 光纤光栅原理及应用[M]. 北京:科学出版社, 2006.(YAO Yunjiang, WANG Yiping, ZHU Tao. Principle and application of fiber bragg grating[M]. Beijing: Science Press, 2006. (in Chinese))
Field measurement and numerical simulation of Liwan 3-1 topsides floatover installation
WU Xiao, LI Xin, YANG Lijun, LI Jun
(Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration, State Key Lab of Ocean Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
1005-9865(2016)04-0001-08
P751
A
10.16483/j.issn.1005-9865.2016.04.001
2015-02-16
国家发改委海洋工程装备研发及产业化专项;远海大型浮式结构物项目
吴 骁(1990-),男,主要从事海洋工程方面的研究。E-mail:wuxiao@sjtu.edu.cn
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
中外文摘(2022年13期)2022-08-02
港工技术(2022年2期)2022-05-12
河北地质(2021年1期)2021-07-21
星星·诗歌理论(2020年3期)2020-04-24
中学课程辅导·教师通讯(2020年22期)2020-02-04
中文信息学报(2019年12期)2019-12-30
水利水电快报(2019年2期)2019-03-08
锦州医科大学学报(社会科学版)(2018年4期)2018-02-12
中国海上油气(2016年1期)2016-06-09