
基于不同载荷测量量的独立变桨控制
2016-10-12 07:42:11陈忠雷
动力工程学报 2016年9期
周 峰, 陈忠雷, 邓 英, 田 德
(华北电力大学 可再生能源学院, 北京 102206)
基于不同载荷测量量的独立变桨控制
周峰,陈忠雷,邓英,田德
(华北电力大学 可再生能源学院, 北京 102206)
讨论了依据3种不同载荷测量量的独立变桨控制,分别为叶片面外弯矩、轮毂旋转坐标系下的弯矩和机舱坐标系下的面外弯矩.结果表明:3种载荷测量方式的实施和维护的难度是依次递减的;与没有独立变桨控制的情况相比,3种方式均能有效地降低叶片面外载荷谐波分量及传递给机组其他部件的载荷;载荷控制并未明显影响机组的发电功率,但显著增加了变桨机构的动作量.
风电机组; 载荷控制; 独立变桨; 载荷测量量
气候变化和日益增长的能源需求促进了可再生能源的研究,风力发电是一种较为成熟的可再生能源发电技术,为了增强其与化石能源发电的竞争能力,需要降低风力发电的度电成本,因而风电机组均向大功率、大尺寸发展,机组的结构载荷也相应增加.除了基本的功率控制需求,载荷控制成为机组控制中很重要的部分[1-2].
由于风切变、塔影效应和湍流等原因,风轮扫掠面上各处的风速不一致.机组运行过程中,叶片在风轮扫掠面上承受着变化的载荷,并通过传动链传导至整个机组,这会增加塔架和齿轮箱的疲劳损伤,从而降低机组的预期寿命.风电机组尺寸的增加进一步加剧了载荷波动,通过载荷控制可以有效地降低载荷波动,从而在设计制造阶段降低风电机组的成本,在运营过程中减少由载荷引起的故障.
已有学者对载荷控制进行了研究[3-7],如在传动链增加阻尼以降低齿轮箱的疲劳载荷,在塔架的前后振动方向和左右振动方向增加阻尼以降低塔架的载荷,应用独立变桨控制(IPC)降低叶片的面外载荷.与依据叶片载荷测量量的独立变桨控制相比,笔者以轮毂部分的载荷测量量作为控制器的输入信号,实现独立变桨控制.
1 依据叶片载荷测量量的独立变桨控制
1.1独立变桨控制
风电机组(文中所指风电机组均为水平轴3叶片形式)的基本控制目标是功率控制.在额定风速以上阶段,控制叶片桨距角以调节气动转矩,保持机组运行在额定功率状态.因此,载荷控制的前提是保证机组正常运行,不影响发电能力及功率控制中的桨距角调节(CPC),即
(1)
式中:β1、β2、β3和βc分别为3个叶片的桨距角和功率控制的集中桨距角.
载荷控制的目标是降低叶片的面外弯矩,因此以叶片根部的面外弯矩作为载荷控制的输入量.从理想化的风轮模型出发,3个叶片的气动性能是完全一致的,唯一区别是相位上依次相差2π/3.以风轮旋转频率(也称1P)作为基频,以傅里叶级数的形式描述叶片的面外弯矩My,i(叶片坐标系见图1):

1,2,3
(2)
式中:Ah和φh分别为My,i的第h次谐波的幅值和初始相位;ω为风轮旋转的频率;i为叶片的标号.
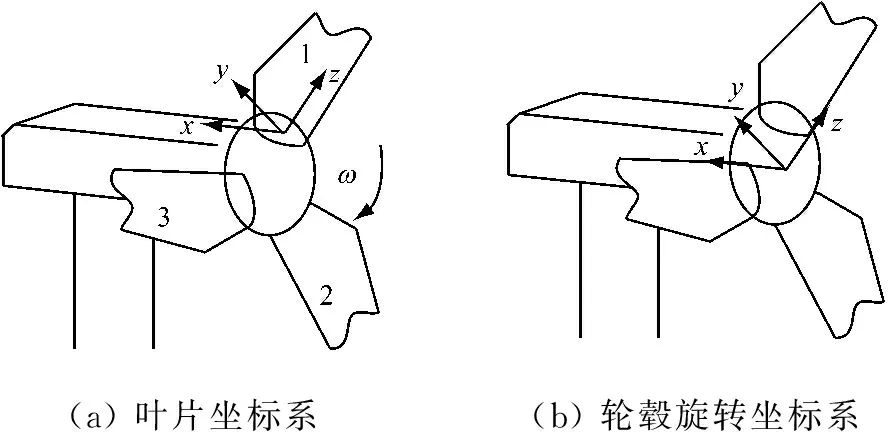
(a)叶片坐标系(b)轮毂旋转坐标系
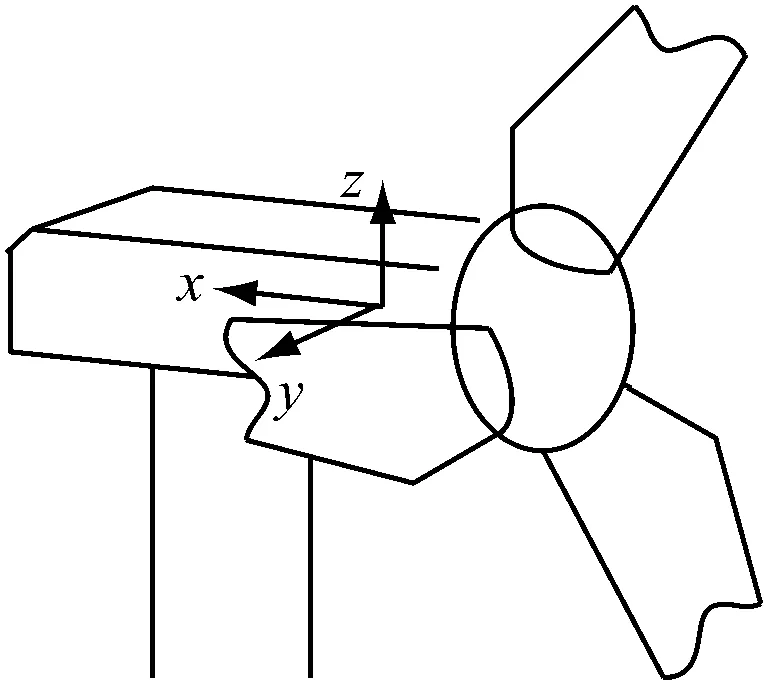
(c) 机舱坐标系图1 风电机组叶片坐标系Fig.1 Wind turbine coordinate system
借鉴交流电机中坐标变换的思想,对3个叶片的面外弯矩进行下列变换[8-9]:
(3)
式中:Pk表示变换矩阵;Md,k、Mq,k分别为My,i在第k次谐波坐标系下的d轴和q轴分量.
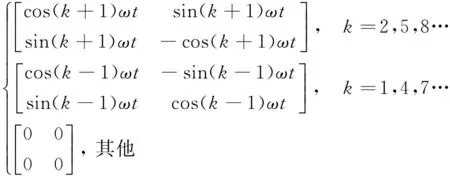
My,i的第h次谐波经过第k次谐波坐标变换的结果符合式(4)的规律:
(4)
由式(4)可知,1P的坐标变换后,原叶片弯矩中的1P分量变为0P,2P和4P分量变为3P,即各分量均变为3P的倍数.
通过坐标变换可明显看出载荷控制的目标,即降低Md,k和Mq,k中的直流分量以控制叶片的面外弯矩,该调节过程可以通过2个积分控制实现.为了不受其他频次的影响,控制频率带宽较窄.控制器输出的桨距角调节量是在第k次谐波坐标系下的,所以需要反变换到叶片坐标系下,如式(5)所示,控制流程如图2所示.
(5)

考虑到整个控制环节的滞后性,需要在反变换矩阵中调整相位,因此
(6)

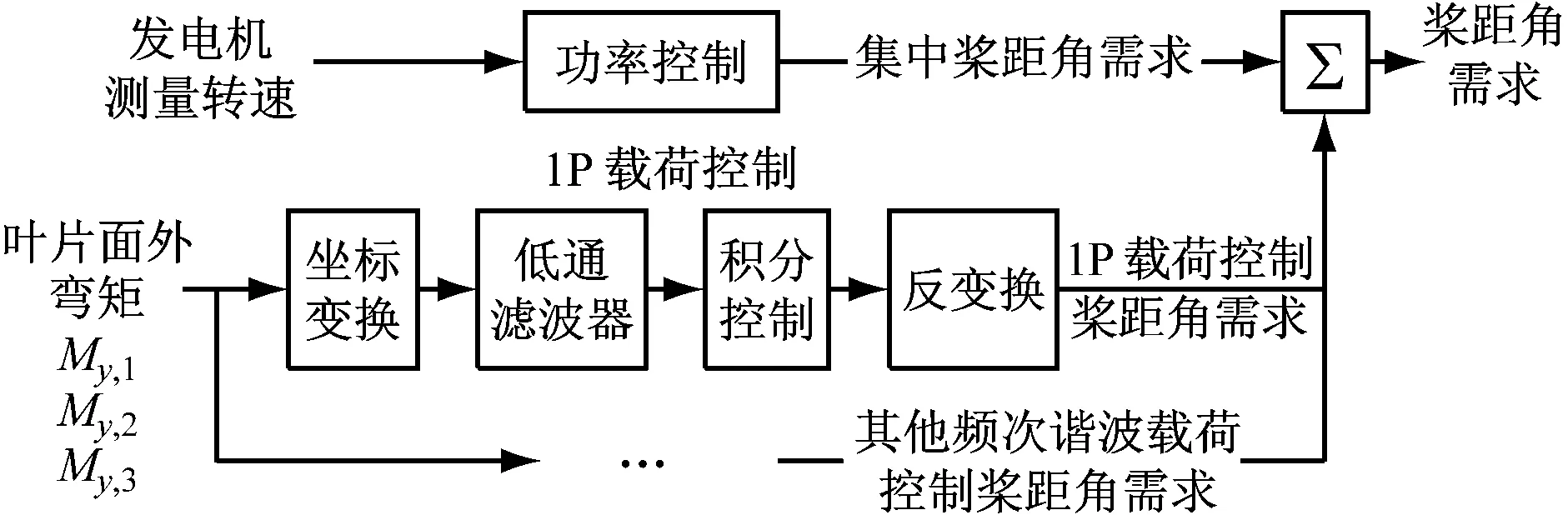
图2 载荷控制流程图Fig.2 Load control scheme
综合功率控制和载荷控制的桨距角调节作用,得到最后的桨距角目标值:
(7)
1.2机组模型及仿真结果分析
以2 MW双馈式风电机组为模型,机组参数如表1所示,应用Bladed软件进行仿真计算.运行工况为16 m/s的恒定风,考虑风切变和塔影效应,对比有无独立变桨控制的叶片面外弯矩.
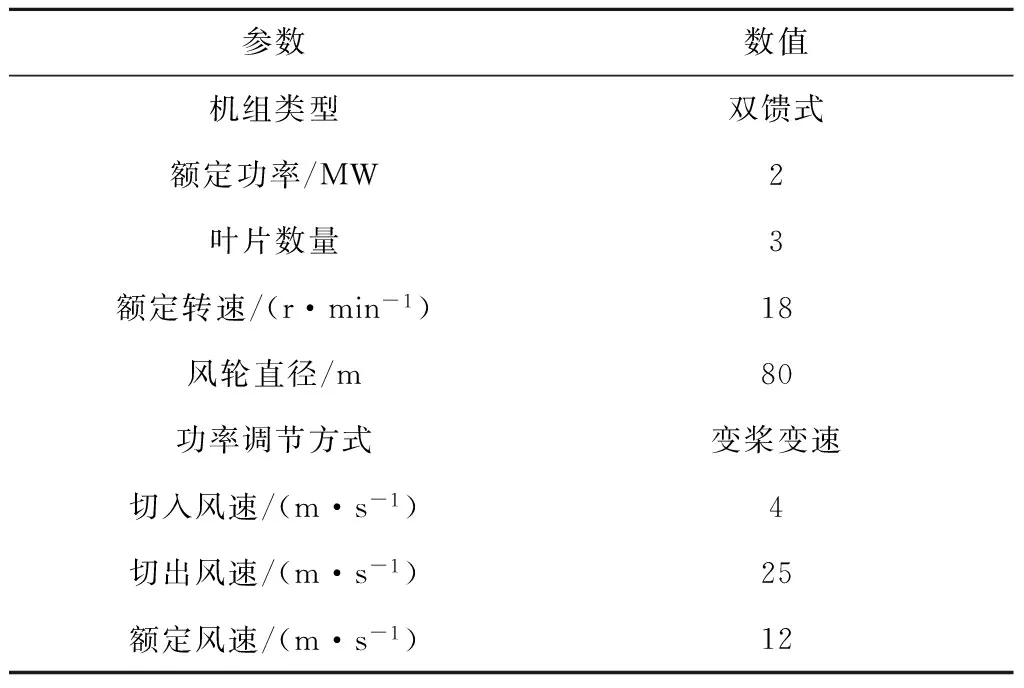
表1 2 MW双馈式风电机组参数
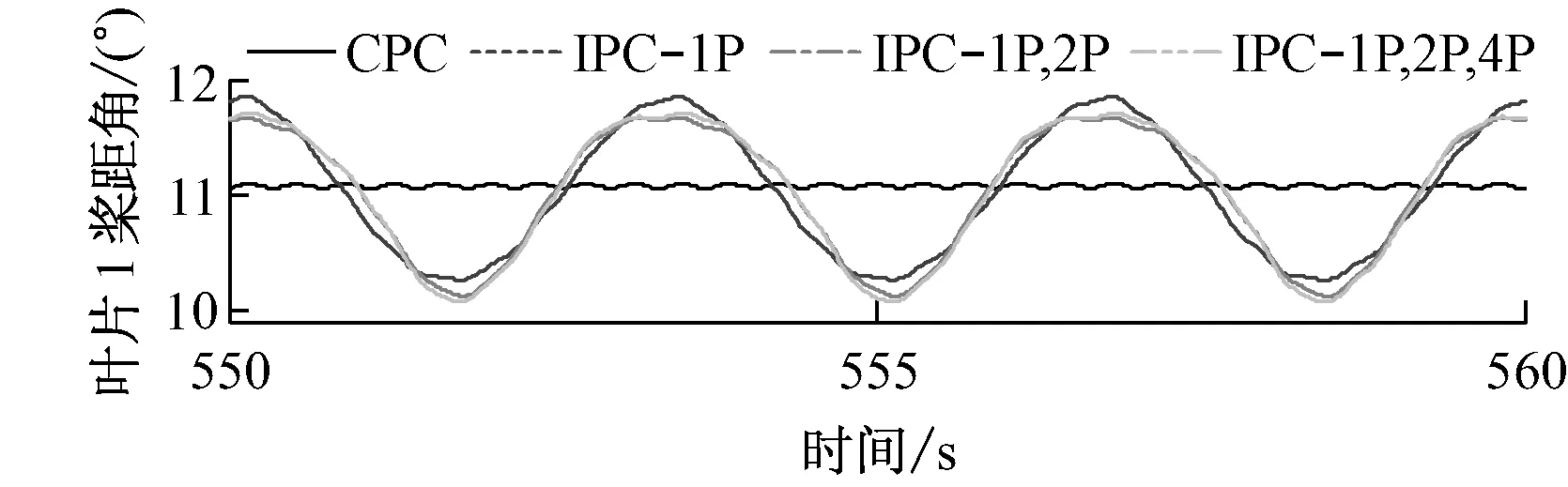
以叶片1为例,图3为仅有功率控制和附加载荷控制时的发电功率和风轮转速曲线,其中IPC-1P表示针对叶片面外弯矩中的1P分量的独立变桨控制,其他依此类推.由图3可以看出,独立变桨控制没有明显影响功率控制,满足了载荷控制的前提要求.与CPC相比,在应用1P载荷控制的IPC情况下,叶片面外弯矩中1P分量从347 kN·m减小到176 kN·m,弯矩降低了47.7%.且2P和4P分量分别降低了33.7%和31.6%.因而,应用IPC的载荷控制可以有效地降低叶片面外弯矩的波动,从而减少叶片的疲劳损伤.但是,从图3(d)可以看出,叶片的桨距角动作量显著增加,会增加叶片变桨机构的损伤,继而增加变桨机构的维护成本.因此需在叶片载荷调节与变桨机构的动作量之间进行一定的协调,取得一个合适的成本方案.
(a)
(c)
(d)图3 仅有功率控制和附加载荷控制时的发电功率和风轮转速曲线
Fig.3Curves of turbine power output and blade rotating speed respectively under collective and individual pitch control
2 依据轮毂载荷测量量的独立变桨控制
以叶片的面外弯矩作为IPC的输入量,需要在叶片根部安装测量设备得到面外弯矩信号.在机组运行过程中,叶片会随着桨距角的调节而转动,因此需要在叶根处安装2个方向垂直的传感器,结合桨距角得出叶片的面外弯矩.总计需要6个传感器得到控制器所需的信号.
2.1轮毂旋转坐标系
为减少传感器的数量,可以在轮毂上安装2个方向垂直的传感器.轮毂上的载荷是3个叶片载荷作用的集中效果,因此通过一定的转换可达到与3个叶片面外载荷测量类似的效果.
由于轮毂也是在旋转的,因此轮毂旋转坐标系(见图1)下y轴和z轴的弯矩可表示如下:
(8)
式中:Ar,h和φr,h分别为Mr,y在第h次谐波下的幅值和初始相位.
与第1节类似,同样存在可以转换到第k次谐波坐标系的转换矩阵Rk:
(9)

2.2非旋转坐标系
第2.1节中所用方法减少了传感器的数量,但是风电机组的控制器安装在机舱,轮毂为旋转部件,为此需要采用滑环或无线的方式在传感器和控制器之间传输信号,这种方式同样不便于应用和维护.据此考虑在机组的非旋转部分测量载荷,并进行相应处理以得到控制器所需要的载荷信号.
风电机组的机舱坐标系如图1所示,定坐标系下平行于风轮旋转平面的y轴和z轴弯矩如下:
(10)
式中:Af,h和φf,h分别为弯矩的第h次谐波的幅值和初始相位.
首先需要从静止坐标系转换到旋转坐标系,转换后弯矩的表达式与旋转坐标系下的表达方式类似,再转换到第k次谐波坐标系,转换矩阵Fk形式如下:
Fk=
(11)
控制器设计与前面的类似,需要注意的是,Mf,y和Mf,z并非直接测量得来.根据载荷测量的位置,需要剔除其中非叶片载荷引起的载荷分量.例如,在机舱主轴的轴承处测量载荷,因该位置距离轮毂中心处有一段距离,需要排除风轮重力作用产生的载荷,否则控制器输入信号包含的非叶片载荷引起的载荷分量会降低控制效果.
2.3控制效果对比
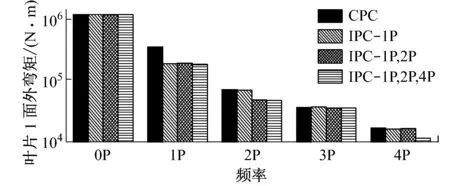
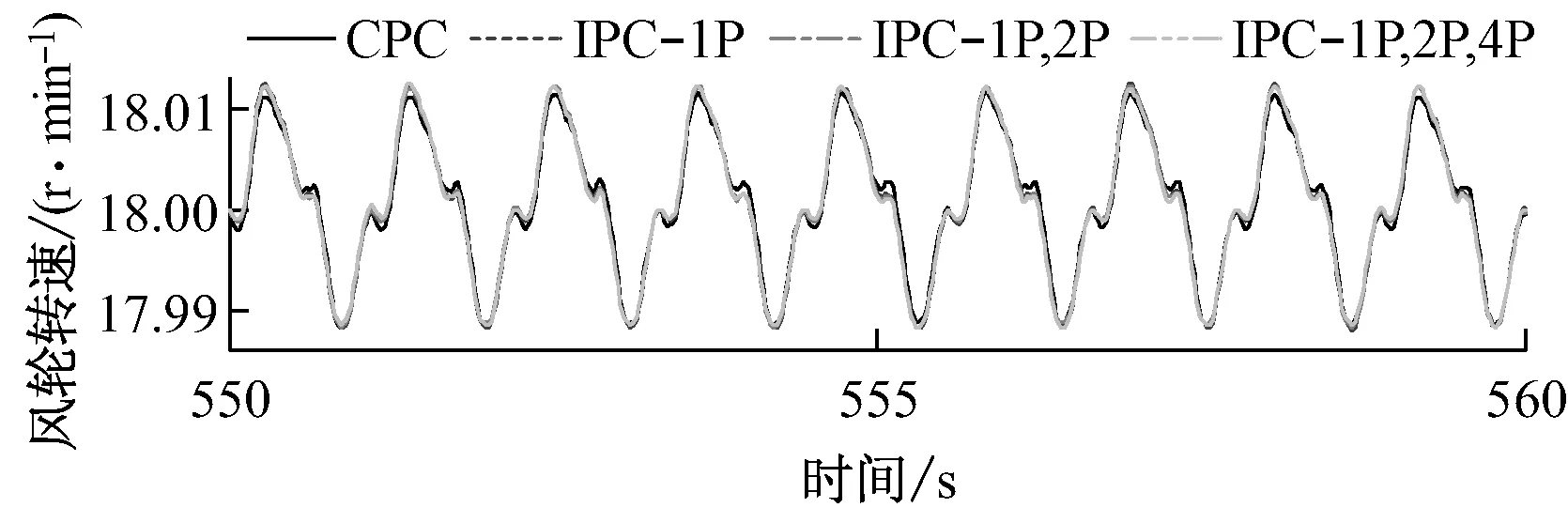
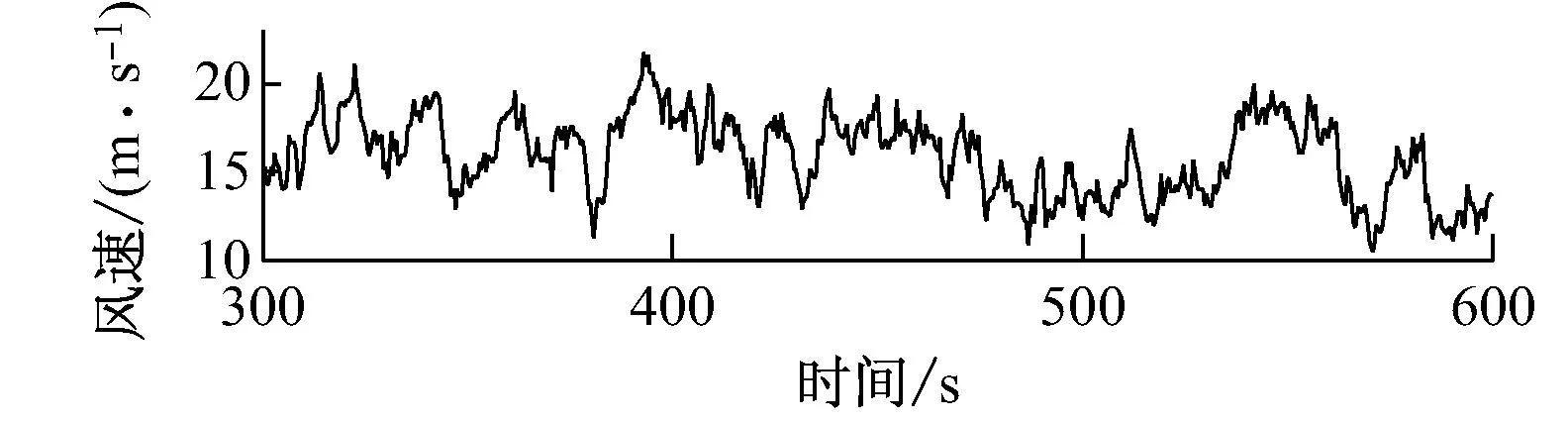
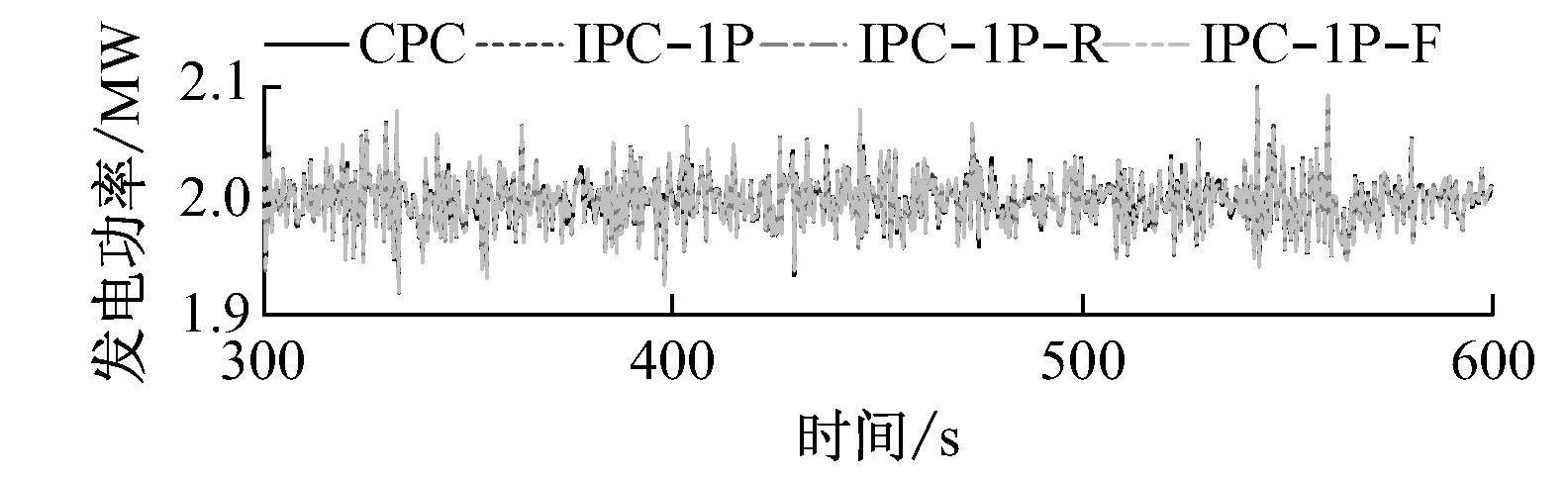
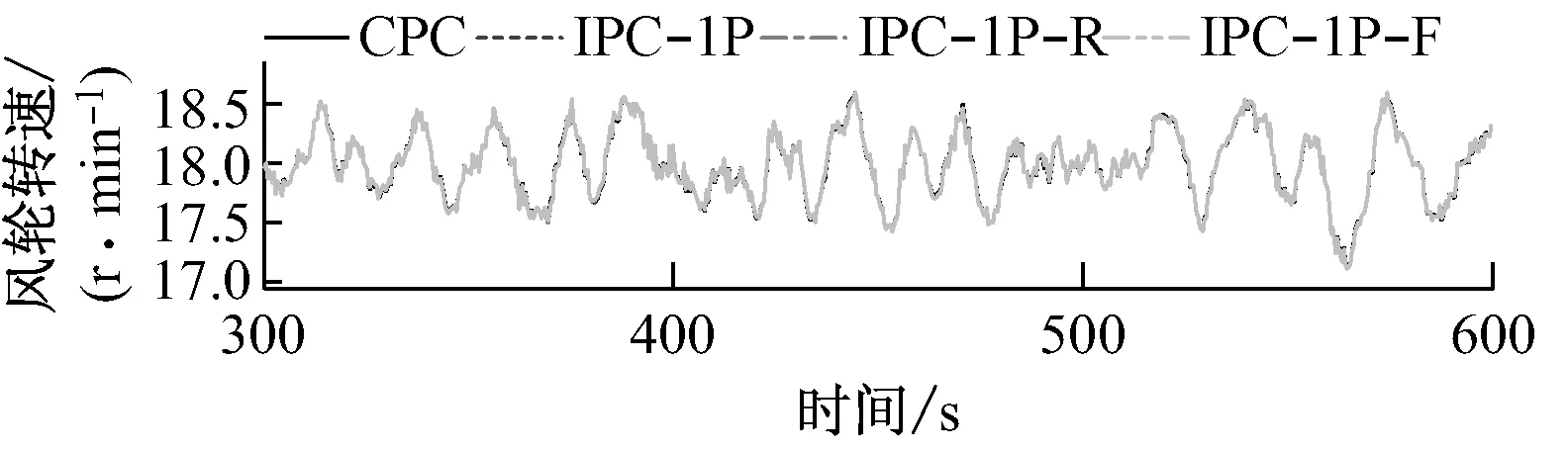
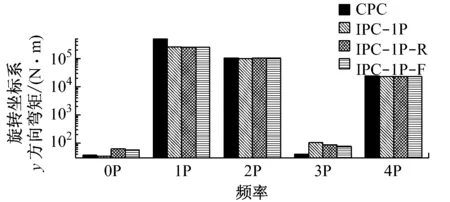
风电机组模型参数见表1,设置平均风速为16 m/s、16%湍流度的风况,验证独立变桨控制下叶片面外弯矩1P分量的降低量.湍流下不同载荷测量信号下的独立变桨控制结果如图4所示(其中,R表示旋转坐标系,F表示非旋转坐标系).
从图4(b)可以看出,独立变桨并未影响功率控制的效果,功率保持在额定功率附近.
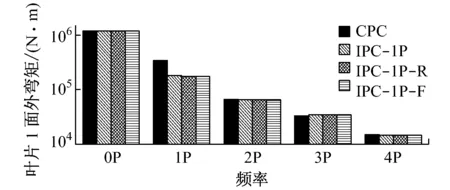
从图4(d)可以看出,3种载荷测量方式下的载荷控制均可有效降低叶片的1P面外载荷,分别降低了47.4%、49.3%和49.3%,区别很小,也从侧面印证了叶片面外载荷只是轮毂集中载荷的一部分.
由图4(e)可知,1P载荷分量有效地降低了49.4%.观察其中频率分量的分布情况,在3P倍数的分量上几乎没有载荷.而在图4(f)中,y方向的0P载荷降低了53.3%,此频率不同于叶片载荷中的1P,可以推知叶片载荷传递到静止坐标系时,载荷频率发生了变化.从坐标变换也可以推导出同样的结论.
3 结 论
(1) 独立变桨控制可以调节单个叶片桨距角,降低由外部因素引起的叶片载荷波动,进而减少叶片的疲劳损伤,延长机组的运行寿命.
(2) 独立变桨控制依赖于载荷测量量,笔者分析了3种载荷测量量,即叶片面外弯矩、轮毂旋转坐标系下的弯矩及轮毂静止坐标系下的面外弯矩.将该技术应用于实际时,需考虑布置和维护的成本,应尽量减少难度,3种载荷测量方式的应用难度依次递减.
(a)
(b)
(c)
(d)
(e)
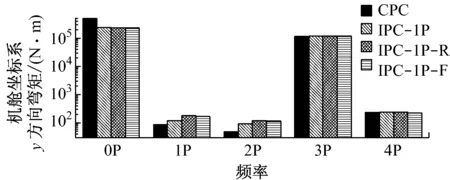
(f)图4 湍流下不同载荷测量信号下的独立变桨控制结果Fig.4 Results of individual pitch control with wind turbulence based on different load measurements
(3) 以2 MW双馈式风电机组模型为例进行仿真计算,考虑湍流、风切变和塔影效应等外部因素.计算结果表明,基于3种测量的载荷控制在叶片一次面外弯矩的调节上有着近似的效果.附加载荷控制后,发电功率和风轮转速与仅有功率控制情况下无显著差别.但是由于独立变桨会显著增加桨距角调节的动作量,加剧变桨机构的疲劳损伤,因此需在叶片载荷控制和变桨机构维护间进行一定的协调.
(4) 载荷控制在不影响机组发电运行的情况下显著减缓了载荷波动,降低了叶片的疲劳损伤.维护量的减少可以增加风电机的成本优势.
[1]PAO L Y, JOHNSON K E. Control of wind turbines[J]. IEEE Control Systems, 2011, 31(2): 44-62.
[2]SONG Y D, LI P, LIU W,etal. An overview of renewable wind energy conversion system modeling and control[J]. Measurement and Control, 2010, 43(7): 203-208.
[3]van der HOOFT E L, SCHAAK P, van ENGELEN T G. Wind turbine control algorithms: DOWEC project-DOWEC-F1W1-EH 03-094/0, Task-3 report [R/OL].(2003-12-01)[2015-12-01]. https://www.ecn.nl/publications/ECN-C--03-111.
[4]SAVINI B, LUPTO R. Supervisory controller and load calculation with individual pitch controller for 5 MW reference turbine[R]. England: GL Garrad Hassan, 2011.
[5]BOSSANYI E, SAVINI B, IRIBAS M,etal. Advanced controller research for multi-MW wind turbines in the UPWIND project[J]. Wind Energy, 2012, 15(1): 119-145.
[6]STOL K A, ZHAO W X, WRIGHT A D. Individual blade pitch control for the controls advanced research turbine (CART)[J]. Journal of Solar Energy Engineering, 2006, 128(4): 498-505.
[7]SELVAM K, KANEV S, van WINGERDEN J W,etal. Feedback-feedforward individual pitch control for wind turbine load reduction[J]. International Journal of Robust and Nonlinear Control, 2009, 19(1): 72-91.
[8]van ENGELEN T G. Design model and load reduction assessment for multi-rotational mode individual pitch control (higher harmonics control)[C]//Proceedings of European Wind Energy Conference. Athens, Greece: European Wind Energy Association, 2006.
[9]叶忠明, 董伯藩, 钱照明. 谐波电流的提取方法比较[J]. 电力系统自动化, 1997, 21(12): 21-24, 40.
YE Zhongming, DONG Bofan, QIAN Zhaoming. Comparision of two approaches for harmonic current extraction[J]. Automation of Electric Power Systems, 1997, 21(12): 21-24, 40.
Individual Pitch Control Based on Different Load Measurements
ZHOUFeng,CHENZhonglei,DENGYing,TIANDe
(School of Renewable Energy, North China Electric Power University, Beijing 102206, China)
Individual pitch control was studied based on following 3 different load measurements, such as the blade root out-of-plane bending moment, rotating hub bending moment and fixed hub out-of-plane bending moment. Results show that the difficulty of above 3 measurement ways in implementation and maintenance is successively decreasing. Compared with controllers without load control, the controllers based on above 3 load measurements are able to cut down load fluctuations, so the load transmitted to other parts of the wind turbine would be reduced accordingly. Moreover, the load control shows no obvious influence on the power output of the wind turbine, but the pitch actuators would work more frequently.
wind turbine; load control; individual pitch control; load measurement
2015-12-01
2015-12-21
周峰(1988-),男,江苏盐城人,博士研究生,研究方向为风电机组控制.电话(Tel.):13581578176;
E-mail:xiaofeng5197@163.com.
1674-7607(2016)09-0711-05
TK83
A学科分类号:480.60
猜你喜欢
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
上海涂料(2021年5期)2022-01-15 06:09:26
东方汽轮机(2020年3期)2020-11-04 11:07:34
大电机技术(2018年4期)2018-09-26 03:11:38
制造技术与机床(2017年10期)2017-11-28 05:24:18
制造业自动化(2017年2期)2017-03-20 14:26:14
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
大型铸锻件(2015年1期)2016-01-12 06:33:29
