
一种混联机器人运动学分析与仿真研究
2016-10-11 03:58章敏凤陈永煌
赤峰学院学报·自然科学版 2016年14期
章敏凤,陈永煌
(安徽信息工程学院,安徽 芜湖 241000)
一种混联机器人运动学分析与仿真研究
章敏凤,陈永煌
(安徽信息工程学院,安徽芜湖241000)
为了使工业机器人的位姿改变更加快速、灵活、工作空间更大,对一种六自由度混联机器人进行了三维建模,并根据右手法则建立了机器人各个关节的坐标系,提出了一种几何和反变换相结合的运动学求解方法,对机器人进行正运动学分析和逆运动学分析,在多解选择时,采用就近原则和逐级剔除的方法.这种结构既有旋转关节机器人的灵活性,也有了直线关节机器人的工作空间.最后用Matlab进行数据仿真,机器人在笛卡尔空间运动轨迹平滑稳定,结果证明了方法的可行性.
机器人;运动学;几何法;反变换法;坐标系
随着工业机器人的发展,用户对机器人的应用范围越来越广.为了满足多种应用要求,机器人结构已不仅仅局限在串联或者并联,旋转关节或者移动关节.本文提出了一种移动关节和旋转关节相结合的混联机器人结构,吸取了直线关节运动范围广的优点,也实现了串联机器人姿态的灵活性.然而,从控制系统提高机器人性能也是非常重要的,机器人控制系统方面的研究一直以机器人运动学作为最主要的问题,而现阶段基本上都是在关节空间中进行对工业机器人的运动轨迹跟踪等问题的研究,机器人运动轨迹跟踪的控制性能在很大程度上受到机器人运动学分析计算的快速性与实时性的制约[1].现阶段主流的机器人运动学分析算法主要有3种:DH参数法,几何法[2]和反变换法.本文首先利用几何法计算前三个关节的角度,再利用反变换法求解后三个关节的角度,保证了运动控制系统的实时运算,并通过“就近原则”选择机器人唯一解.
1 建立坐标系
混联机器人的三维模型如图1所示,首先根据模型建立机器人的坐标系,根据用户需要确定Z轴为旋转关节旋转轴,坐标系和关节角的方向满足右手法则[3].各个关节坐标系的数学模型如图2所示,0系O0-X0Y0Z0为全局坐标系.T系为工具坐标系,1、2、3、4、5、6系分别为机器人的六个关节坐标系.

图1 混联机器人三维模型

图2 仿真对应的数学模型
2 机器人运动学分析
2.1正运动学分析
根据已知的机器人几何参数和关节角矢量,计算出其法兰末端执行器相对于基坐标系的位姿[4].仿真对应的数学模型如图2所示,机器人的固定参考坐标系为坐标系0,先对坐标系0到坐标系1进行变换,同理可推算出坐标系1到2的变换2T1、坐标系2到3的变换3T2、坐标系3到4的变换4T3、坐标系4到5的变换5T4和坐标系5到6的变换6T5,从而可以得到从坐标系0到坐标系6的坐标变换6T0,从坐标系0到工具坐标系T的变换为TT0=6T0TT6.


2.2逆运动学分析
已知机器人机械杆件的几何参数及法兰末端执行器相对于基坐标系的期望位置和姿态,计算出能使其末端执行器达到这个预期位置姿态的机器人各关节的转角.本文采用几何法与反变换法相结合进行逆运动学分析,过程如下:
第一步:求解第一个关节角度
6T0的变换矩阵:6T0=TT0(TT6)-1.

第二步:求解第二、第三关节角
(1)当Wx≥a1+a3时,如图3所示,

图3 末端在X正方向

图4 末端在X负方向

整理可得 :(a3*cos40°-a4*sin40°)sinθ3+(a4*cos40°+a3*sin40°)cosθ3=Wx-a1
设(a3*cos40°-a4*cins40°)=A,(a4*cos40°+ a3*sin40°)=B,Wx-a1=C
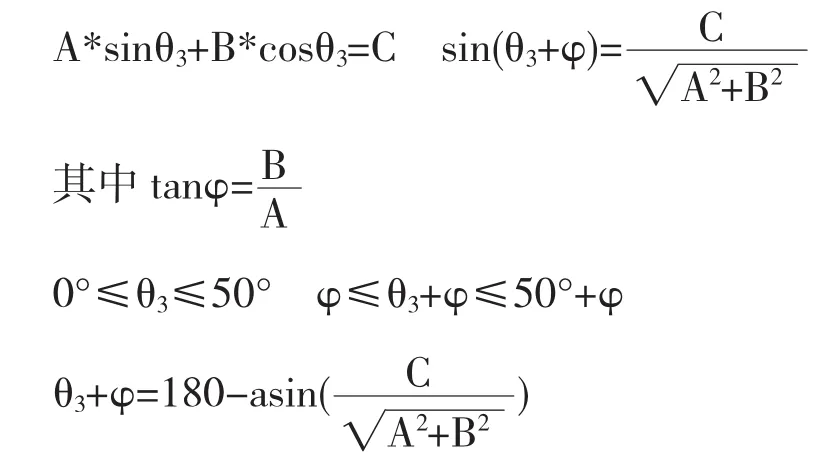
由可得出第三个关节角度求解公式为:

所以有θ2=Wz+a2+L*sos(180°-ø-θ3-40°)
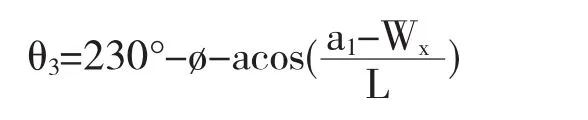
(2)当Wx<a1+a3时,如图4所示,
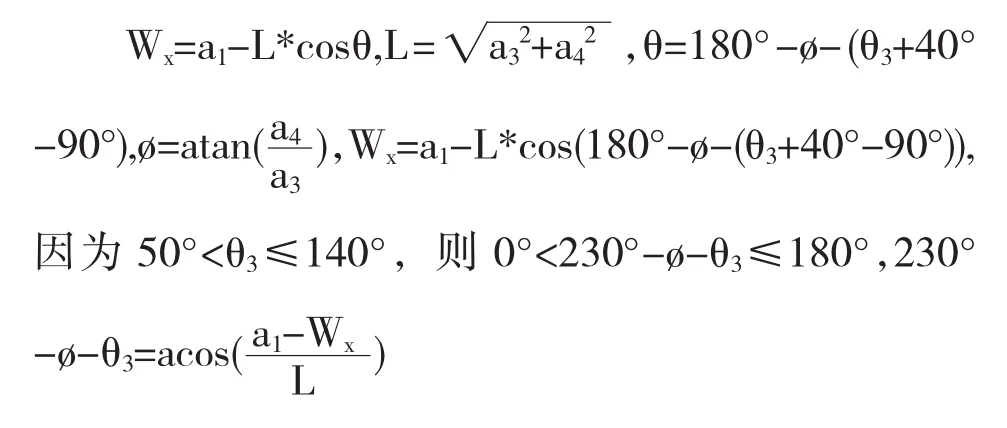
由此可得出第三个关节角度求解公式:
接着是第二个关节角度求解:

所以有θ2=Wz+a2+L*sin(180°-ø-(θ3+40°-90°))
4 结束语
本文提出了混联结构机器人,利用几何法和反变换法相结合的快速求解方法,对机器人进行了运动学分析,这种结构既有旋转关节机器人的灵活性,也有了直线关节机器人的工作空间.而且由Matlab中的仿真结果可以看出,本文提出的运动学算法能让混联机器人在笛卡尔空间运动轨迹平滑稳定,是一种非常有效的混联机器人运动学算法.
〔1〕李胜,王轶卿,陈庆伟,等.一种求解冗余机械手逆解问题的几何算法[C].中国控制与决策学术年会论文集,2007.411-415.
〔2〕祖迪,吴镇炜,谈大龙.一种冗余机器人逆运动学求解的有效方法 [J].机械工程学报,2005,41(6):71-75.
〔3〕蔡自兴.机器人学[M].北京:清华大学出版社,2011.
〔4〕孙福春,朱纪洪,刘国栋,等译.机器人学导论-分析、系统及应用 [M].北京:电子工业出版社,2006.26-60.
〔5〕胡海燕,王鹏飞,孙立宁,赵勃.线驱动连续型机器人的运动学分析与仿真[J].机械工程学报,2010(19):15-18.
〔6〕陈钢,贾庆轩,李彤,孙汉旭.基于误差模型的机器人运动学参数标定方法与实验[J].机器人,2012(06):32-35.
〔7〕王智兴,樊文欣,张保成,史源源.基于Matlab的工业机器人运动学分析与仿真 [J].机电工程,2012(01):19-22.
〔8〕东辉,杜志江.基于工作空间密度函数的平面冗余机器人的逆运动学求解算法[J].机械工程学报,2015(04):11-14.
〔9〕刘蕾.一种串联机器人运动学快速求解方法[J].自动化仪表,2015(08):33-35.
TP242.2
A
1673-260X(2016)07-0022-03
2016-04-23
安徽省教育厅重点科研项目(KJ2015A333)
猜你喜欢
湖南电力(2022年3期)2022-07-07
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
电测与仪表(2016年22期)2016-04-12
