基于MFBD的输弹机刚柔耦合动力学建模及仿真分析
2016-09-13 06:05郝驰宇冯广斌闫鹏程孙华刚
振动与冲击 2016年15期
郝驰宇, 冯广斌, 闫鹏程, 孙华刚, 刘 超
(1.军械工程学院,石家庄 050003;2.军械技术研究所,石家庄 050003;3. 92853部队,葫芦岛 125100)
基于MFBD的输弹机刚柔耦合动力学建模及仿真分析
郝驰宇1,2, 冯广斌2, 闫鹏程2, 孙华刚2, 刘超3
(1.军械工程学院,石家庄050003;2.军械技术研究所,石家庄050003;3. 92853部队,葫芦岛125100)
针对某自行火炮自动装填系统中的开式链传动输弹机,为了掌握其工作过程中的动力学特性和关键构件的受力情况,利用RecurDyn软件建立了输弹机多刚体动力学模型并进行仿真,利用实验数据校核所建模型的合理性,得到了输弹行程中链条的动力学特性;之后基于多柔体动力学(MFBD,Multi-Flexible-Body Dynamics)技术完成对关键构件的柔性化,建立了输弹机刚柔耦合动力学模型,得出了不同位置构件在输弹行程中的应力云图,通过分析确定了危险点的位置,分析结果对输弹机的故障机理、故障演化规律及疲劳性能研究等提供了依据。
输弹机;多柔体动力学(MFBD);刚柔耦合;RecurDyn
输弹机是自行火炮自动装填系统的重要组成部分,主要负责将弹丸或药筒迅速可靠地输送到炮膛之内,但由于输弹机具有结构复杂、工作环境恶劣、工作冲击载荷大、工作环境封闭不便于保养等特点,使其成为自动装填系统中故障率较高的子系统[1]。
在自动填装系统的输弹机构中存在两种形式的链条传动,一种是研究较多的旋转闭式链传动[2-3],另外一种是研究较少的开式链传动,主要用作往复直线运动,这种链条的建模相对复杂,目前仅对其有过一定的理论研究[4],而针对其动力学建模、仿真及相关特性的研究较少。本文针对某自行火炮的开式链传动输弹机,建立其多刚体动力学模型进行仿真并根据实装试验进行验证,得到了这种开式输弹链条的动力学特性。
而在工程实际中,多体系统的部件在运行过程中不存在绝对的刚性体,肯定会表现出一定的柔性体特征,刚柔耦合多体动力学建模可以更真实的模拟机构的实际工作状态[5-7]。本文中在建立可信的输弹机多刚体动力学模型后,基于多柔体动力学(MFBD)技术,利用RecurDyn中创新的FFLex(有限元柔性体)模块,对其关键构件进行柔性化建模,建立了刚柔耦合动力学仿真模型,分析仿真结果得到了关键构件在输弹行程中的受力情况,为其危险位置的确定和故障机理的分析提供了参考依据。
1 输弹机结构组成及运行原理
该输弹机为电控液压驱动链条式输弹机,由齿轮箱体、链盒、链条、推壳机构、测速装置和手动机构等组成,其主要结构如图1所示[1]。

图1 输弹机基本结构示意图Fig.1 Basic structure of ramming mechanism
如图2所示,本文研究的输弹机链条是首尾不相接的开式链传动机构,不工作时链条在链盒中呈柔性体,而在输弹行程中链条经过卡锁机构时,相邻锁爪及内外链板端面闭合,输弹链条闭锁成为刚性杆推动弹丸快速入膛,输弹行程到位时,末位行程开关控制链条回收,收链过程中刚性链条经过解锁机构时解锁,收链到位后液压马达停止转动。

图2 输弹机工作原理Fig.2 Working principle of ramming mechanism
2 刚柔耦合模型的动力学理论基础
2.1基于RecurDyn的多体动力学理论
韩国开发的多体动力学仿真软件RecurDyn,基于相对坐标系动力学方程理论,采用的完全递归算法可以完成复杂机械运动的仿真与受力分析,在处理复杂多体系统动力学上,尤其是在求解大规模、高速及刚性问题时,其求解速度和效率要优于传统的多体动力学软件[8]。基于相对坐标系开发的RecurDyn软件的详细理论公式参见文献[9]。
在绝对坐标系中物体的速度可以表示为:

(1)
式中:nc为绝对坐标系中的坐标数
在相对坐标系中物体的速度可以表示为:
(2)
式中:nr为绝对坐标系中的坐标数
因此所有物体的笛卡尔速度可以通过如下形式获得:

(3)
式中:系数矩阵B可以用相对坐标来表达。
系统的运动方程可从第一类拉格朗日方程获得:
(4)
2.2柔性体运动方程
如图3所示,柔性体上的任一点P的位置向量为:
r=r0+A(sp+uP)
(5)
式中:r为P点在惯性坐标系中的向量;r0为相对坐标系原点在惯性坐标系中的向量;A为方向余弦矩阵;sp为柔性体未变形时P点在相对坐标系中的向量;uP为相对变形向量。如下式,uP可采用模态坐标来描述:

图3 柔性体变形模型Fig.3 Deformation model of flexible body
(6)
式中:Φp为变形模态矩阵;qf为变形的广义坐标。因此,柔性体上任一点的速度向量及加速度向量为:
(7)
(8)
2.3柔性体动力学方程
考虑节点P变形前后的位置、方向和模态,柔性体的广义坐标可表示为:
ξ=[xyzψθφqi]T=[rψq]
(i=1,2,…,M)
(9)
柔性体的动力学方程由拉格朗日方程导出:
(10)
式中:Ψ为约束方程;λ为对应于约束方程的拉氏乘子;ξ为如式(9)定义的广义坐标;Q为投影到ξ的广义力;L为拉格朗日项,定义为L=T-W,T和W分别表示动能和势能,Γ表示能量损耗函数。则最终的运动微分方程为:
(11)

2.4MFBD技术
MFBD(Multi-Flexible-Body Dynamics)技术采用节点法对传统的模态缩减法进行了补充扩展,将多体动力学和有限元分析两个单独的领域结合起来,克服了传统模态缩减法的弊端,能够精确表达接触力引起的局部变形,并能够表达柔性体累计的非线性变形,可以有效地求解机构的大变形及非线性的问题,结合其强大的接触分析能力还可以实现“刚-柔”“柔-柔”等复杂接触的建模与分析问题[10]。在分析的过程中,可以得到结构柔性体上节点应力随时间变化的过程。
在对输弹机刚柔耦合动力学进行分析时,需要计算输弹机构件在时变载荷作用下的接触力和应力。因此采用MFBD技术能够精确地处理柔性体之间以及柔性体与刚体之间的接触问题,同时能够直接得到构件中相关的应力结果。
3 输弹机多刚体动力学模型的建立
3.1多刚体模型的建立
利用三维建模软件建立输弹机部件的三维模型并进行装配,之后导入多体动力学软件RecurDyn中,然后根据其拓扑关系进行约束和接触的添加[11],在RecurDyn中建立的模型如图4所示。

图4 RecurDyn中的动力学模型Fig.4 Dynamic model in RecurDyn
3.2驱动力的添加
根据输弹机构液压传动原理及其数学模型[12],利用AMESim仿真软件建立输弹机构液压模型如图5所示。
输弹机的机械动作取决于两个电磁阀的先后工作状态,两个电磁阀都是二位四通的[1]。输弹时,1#电磁阀工作,大、小泵泵出的液压油经过油滤后,进入液压马达,再经过2#电磁阀、集流盘和回油管路回油箱,此时液压马达工作,完成输弹动作;当输弹行程结束时,1#电磁阀断电,2#电磁阀工作,液压马达反向工作,带动输弹链收回到链盒当中。

图5 输弹机液压仿真模型Fig.5 Hydraulic simulation model
利用RecurDyn和AMESim之间的接口模块,将液压驱动添加到已建立的输弹机动力学模型中,根据实际工况进行仿真。
3.3仿真结果试验验证
在建立输弹机多刚体动力学模型后,如图6所示,需要利用实装试验来对模型进行校核,并根据实验结果对动力学模型进行修改完善,在保证其可信度的基础上才能应用于工程实际当中[13]。

图6 仿真模型校核流程Fig.6 Checking process of simulation model
输弹机的作用就是在规定的时间内推动弹丸快速入膛,所以本节中分别利用弹丸加速度以及在不同射角下输弹行程完成时间的仿真值与实验数据的一致性来评价动力学模型的可信度。
在利用试验结果进行模型修正时,需要考虑的因素有:① 三维模型的修正:包括零部件的外形尺寸、材料属性等;② 约束和接触关系的校核:零部件之间的拓扑关系(约束和边界条件)、接触参数等;③ 仿真参数的设定,时间、步长/终止条件等。
输弹机安装在自动装填系统防护舱的后部和下部,如图7所示,可以看出整个自动装填系统内部空间狭小,工作环境恶劣,而且在输弹过程系统始终处于强烈的冲击与振动环境中,因此在噪声大、屏蔽严重的自行火炮内部空间内,很难利用传统的有线传感器对输弹机的状态参数进行检测,故选择采用存储式无线传感器,对输弹机的状态检测开展研究。

图7 输弹机安装位置Fig.7 Installation site of ramming mechanism
无线传感器具有安装布置方便的优点,同时无线的连接也可以避免不同传感器之间相互干扰的问题,利用无线传感器可以对整个输弹行程进行线上的实时检测,解决了有线传感器无法对输弹机进行实时检测的问题。
实验所需无线传感器固定在模拟弹丸内部,主要用于采集输弹行程中弹丸的加速度信号,选取的无线传感器如图8所示,其主要参数如表1所示。

表1 无线传感器主要参数

图8 无线传感器Fig.8 Wireless sensor

图9 0°射角下弹丸加速度实验值与仿真值的比较Fig.9 Data comparison between simulation and experiment in projectileacceleration at 0° shooting angle
从图9中可以看出,输弹行程中弹丸加速度的实验值中存在着大量的噪声,但相比于仿真值的数值变化趋势基本吻合,可以反映实际机构的运行特征,且弹丸的冲击性加速度的仿真值较大,这是由于在建模过程中对动力学模型进行了一定的简化,仿真时也忽略了部分的摩擦导致的,但是相差值不大,可以说明该模型具有较高的可信度。
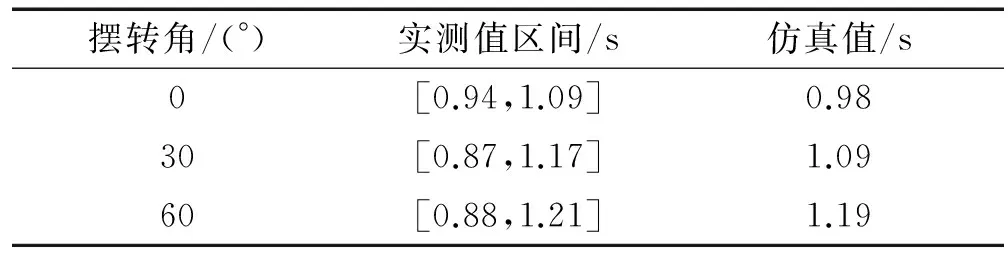
表2 试验值与仿真值的数据对比
通过试验数据可以确定输弹机输弹时间,而输弹动作的时间值是存在离散性的,这是由于系统各动力学参数、载荷、边界条件的随机分布等因素造成的,在表2中为多次测量数据的区间值,利用这些实测试验数据与仿真数据比较来对输弹机虚拟样机进行可信度的验证。从表中可以看出在三种不同射角下,输弹行程时间的仿真值都在试验所测得的区间内,因此可以说明建立的输弹机动力学模型是可信的。
4 输弹机刚柔耦合动力学模型的建立
4.1刚柔耦合模型动力学分析方法
RecurDyn中存在两种柔性体模块[14]:RFlex(模态柔性体)和FFLex(有限元柔性体),其中RFLex是利用模态缩减法,将在有限元程序中计算出的模态参数来代替系统中的刚性体;而FFLex采用RecurDyn创新的完全柔性体技术,只需对刚体进行网格的划分,无需进行模态分析,自动调用RecurDyn中的有限元程序进行分析。
建筑装饰装修设计人员要运用绿色环保设计理念,结合装饰装修设计中遇到的问题,合理融入与绿色环保有关的装修装饰理念,制定出更为科学的解决措施,不断减少建筑室内装饰装修施工所带来的环境污染。在进行建筑室内装饰装修设计时,设计人员需要加强设计管理,并妥善布局,结合建筑室内装饰装修材料的使用现状,展开科学讨论。例如,在该建筑装饰装修设计过程之中,选择采用地板砖还是木地板,才能够保证建筑室内地面装修装饰效果达到最好。在建筑室内墙面装饰装修过程当中,采用壁纸还是墙面漆,能够获取最佳的装饰效果。
RFLex只需将有限元程序中的网格模型缩减成模态信息,计算简单易行,但是其缺点也很明显,构件之间的接触只能通过虚拟的点来搭建,模态柔性体变形后需要在外部有限元程序中进行模态的更新,这很难实现。而本文所选用的FFLex相对于RFLex有明显的优势,柔性体模型的修改只需重新进行网格的划分,而且由于变形是利用柔性体节点上的相对变形来描述,所以可以考虑柔性体的大变形、非线性等非线性变形的积累。
前一节中建立的输弹机多刚体动力学模型主要采用接触副描述内外链板、锁爪、销轴等部件之间的相互作用关系,因此不满足采用模态缩减法建立刚柔耦合动力学模型的条件,因此本节中将输弹机的关重件-链板柔性化,基于多柔体动力学(MFBD)技术,研究采用有限元柔性体(FFLex)建立输弹机刚柔耦合动力学模型的方法。
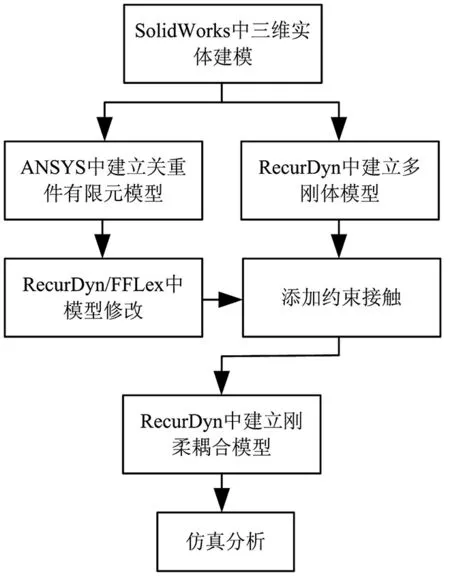
图10 刚柔耦合动力学分析流程Fig.10 Process of rigid-flexible coupled simulation
本文提出一种利用三维建模软件SolidWorks,有限元分析软件ANSYS及多体动力学软件RecurDyn,建立刚柔耦合动力学仿真模型的方法,搭建了刚柔模型动力学分析的框架,利用软件之间的接口程序可以快速的建立刚柔耦合动力学模型,分析流程图如图10所示[5]。
4.2柔性化关键部件的受力分析
图11为输弹机链板的受力图,在输弹行程中,相邻链板由两端销轴连接,随着链轮的转动,相邻链板两端面闭合形成刚性杆,推动弹丸进入炮膛中。所以链板受力由两部分组成,第一部分是连接相邻两个链板间的销轴力Fr,第二部分是相邻两个链板端面闭合形成的压力Ft。

图11 链板的受力分析Fig.11 Stress analysis of chain plate
4.3刚柔耦合模型的建立
在ANSYS经典环境中完成材料属性的设置后进行网格划分,可以通过“CDWRITE”命令生成相应模型的*cbd文件[14]。图12为链板的有限元模型。
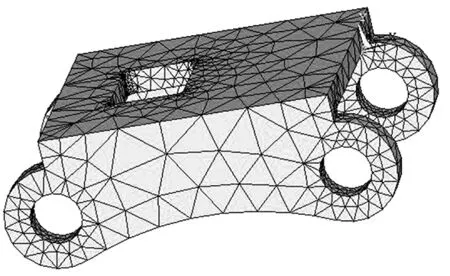
图12 链板有限元模型的网格划分Fig.12 Meshing of chain plate finite element m odel
将链板的有限元模型导入到RecurDyn中替换原有的构件之后,原有构件的接触及约束关系都会消失,需要对有限元模型进行进一步的处理。根据图11所示链板在输弹行程中的受力情况,与链板发生作用的有在两端接触并闭合的链板、锁爪及连接相邻链板间的销轴,利用FFLex/mesher将有限元模型进行修改,见图13。

图13 链板有限元模型的修改Fig.13 Modification of chain plate finite element model
(1) 创建节点集和刚性FDR单元代替原刚性链板与销轴之间的旋转副;
为了获取不同位置处链板的受力情况,分别选取链条头部的1号链板,中部的20号链板,尾部的40号链板进行柔性化,建立完整的刚柔耦合模型如图14所示。
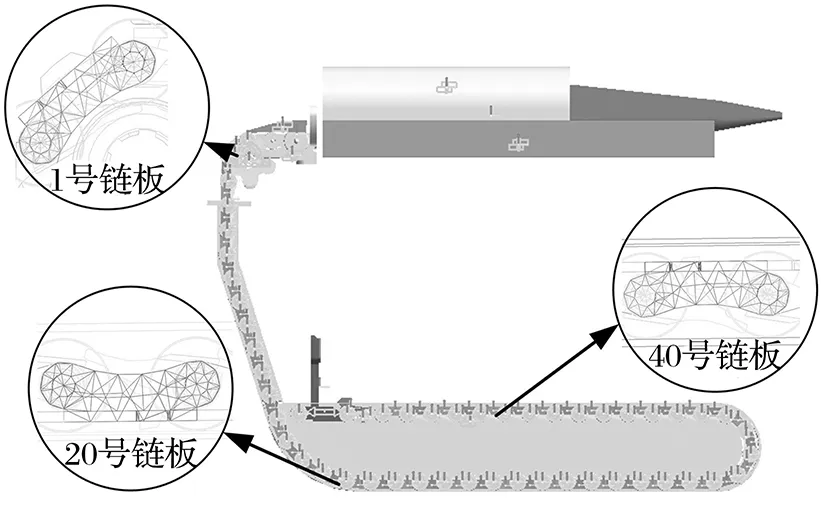
图14 输弹机刚柔耦合模型Fig.14 Ramming mechanism rigid-flexible coupled model
5 仿真结果分析
5.1多刚体动力学模型仿真结果分析
选取输弹射角为30°,设定步长为0.005 s,及其重力,根据实际工况要求,设定终止条件(stop condition)为链条头横向伸出2 250 mm,采用DDASSL积分器进行动力学求解(Dynamic Analysis)。

图15 链条头的位移、速度、加速度曲线Fig.15 Displacement, velocity and acceleration curve
之后利用仿真结果进行输弹行程动力学特性的分析,如图15所示为链条的位移、速度及加速度的特性曲线,表3为前0.5 s中链条与链轮切向速度的比较,可以看出:

表3 链轮切向速度与链条速度比较
在链条头位移连续增加的同时,链条头的速度与加速度曲线是上下波动的,并且链头推弹的速度不等同于链轮的切向速度,这说明链条的运动是不稳定的。这种不稳定性是由于链传动的多边形效应造成的,当主动链轮以平稳的角速度转动时,节圆和节线的多边形不重合,导致从动的滚子带动链条的速度及加速度均不是平稳变化的[15]。
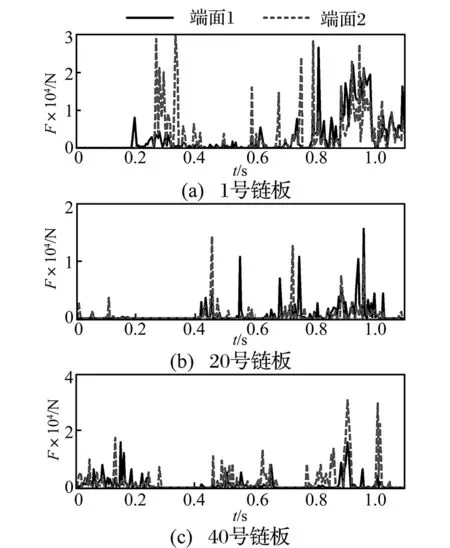
图16 链板间的碰撞力曲线Fig.16 Collision force curve between chain plate
由图16(其中端面1为靠近链条头部的端面,端面2为靠近链条尾部的端面)中可以看出,输弹机在高速重载的环境下,链条的多边形效应以及链条头与弹丸的周期性冲击造成了输弹机链传动机构间在短时间内存在的较大的冲击载荷,这样大的冲击载荷会增大接触构件之间的磨损,加大系统的负担,降低传动的效率,在长期运行后可能会出现传动失效等问题[16]。
5.2刚柔耦合动力学模型仿真结果分析
在RecurDyn中,可以直观的看到柔性化构件的受力情况,图17为不同位置的柔性化链板在输弹行程中出现峰值时刻的应力图。

图17 不同位置链板的应力图Fig.17 Chain plate stress diagram in different positions
从图16和图17中可以看出:
(1) 从时间上来看,链板所受应力的极值点都在0.9~1.1 s之间,这是因为在输弹行程末期链条的速度急速下降,造成链条内部的动载荷急剧增大;
(2) 1号链板的应力值最大,20号链板次之,40号链板最小,这是因为1号链板在链条头部,链条头在整个行程中与弹丸底部存在着反复的冲击性载荷,导致其应力较大,而20号和40号链板分别在链板的中部和尾部,受到的冲击载荷相对较小,
(3) 从应力的分布来看,链板的中下部受力较大,危险点在链板的中部,但由于销轴与链板之间存在持续的接触及摩擦碰撞,所以链板最易受损的位置应该是链板与销轴接触的销轴孔内表面。
6 结 论
(1) 利用多体力学仿真软件RecurDyn建立起完整的开式链传动输弹机的多刚体动力学模型,验证得到的模型是可信的。
(2) 模拟实际工况下进行仿真,得到了输弹链条在输弹行程中的动力学特性,多边形效应造成开式链传动运动的不稳定性与冲击载荷,而链条头和弹丸的冲击加大了链板之间的冲击载荷。
(3) 基于多柔体动力学理论(MFBD),结合有限元软件ANSYS,搭建了刚柔耦合动力学分析的框架,建立起了输弹机的刚柔耦合模型,得到了链板在输弹行程中的受力情况,确定了危险点的位置在链板的中下部,最易受损的部位为链板与销轴接触的销轴孔内表面,结果为输弹机故障机理分析和下一步的故障仿真及疲劳分析提供了一定的依据。
[1] 侯保林, 樵军谋, 刘琮敏. 火炮自动装填[M]. 北京: 兵器工业出版社, 2010: 69-77.
[2] 李伟, 马吉胜, 狄长春, 等. 液压式输弹机输弹故障仿真研究[J]. 系统仿真学报, 2007, 19(10): 2226-2229.
LI Wei, MA Ji-sheng, DI Chang-chun, et al. Simulation research on feeding failure of hydraulic ramming device[J].Journal of System Simulation, 2007,19(10): 2226-2229.
[3] 郝晓宝. 某自行火炮输弹机可靠性分析与研究[D].南京: 南京理工大学, 2006.
[4] 周成, 王惠方, 屈彦东, 等. 某火炮自动装填系统推弹机构运动分析[J]. 火炮发射与控制学报,2011,12:58-61.
ZHOU Cheng, WANG Hui-fang, QU Yan-dong, et al. Motion analysis on cartridge pusher of gun automatic loading system[J]. Journal of Gun Launch & Control,2011,12:58-61.[5] 高准, 屈效池, 张天孝, 等. 基于Hertz接触力模型的惯性平台内框架组件失稳倒台动力学建模与仿真分析[J]. 振动与冲击, 2012, 31(14): 52-55.
GAO Zhun, QU Xiao-chi, ZHANG Tian-xiao, et al. Dynamic modeling of inertial platform’s inner gimbal component based on Hertz contact model and simulation of running away process due to instability[J]. Journal of Vibration and Shock, 2012, 31(14): 52-55.
[6] 姚廷强, 迟毅林, 黄亚宇, 等. 刚柔耦合齿轮三维接触动力学建模与振动分析[J]. 振动与冲击, 2009, 28(2): 168-171.
YAO Ting-qiang, CHI Yi-lin, HUANG Ya-yu, et al. Contact dynamics modeling and simulation on rigid-flexible gear pair[J]. Journal of Vibration and Shock,2009,28(2):168-171.
[7] 隋立起, 郑钰其, 王三民. 刚柔耦合多体系统的冲击响应分析方法及应用研究[J]. 振动与冲击, 2012, 31(15): 26-29.
SUI Li-qi, ZHENG Yu-qi, WANG San-min. Method of analysing impact reponse of multi-rigid-flexible system and its application[J]. Journal of Vibration and Shock,2012,31(15):26-29.
[8] Yoo W S, Kim S S, Park T W, et al. Multi-body dynamics research in korea[J]. JSME, 2003,46(2): 449-458.
[9] Bae D S, Han J M, Yoo H H. A generalized recursive formulation for constrained mechanical system dynamics[J]. Mechanics of Structures and Machines,1999,27(3):293-315.
[10] 焦晓娟, 张湝渭, 彭斌彬. RecurDyn多体系统优化仿真技术[M]. 北京: 清华大学出版社, 2010.
[11] 李伟, 王兴贵, 黄泽平, 等. 输弹机虚拟样机建模与动态仿真[J]. 火炮发射与控制学报, 2006, 34(12): 29-32.
LI Wei, WANG Xing-gui, HUANG Ze-ping, et al. Modeling and dynamic simulation analysis for virtual prototype of rammer[J]. Journal of Gun Launch & Control,2006,34(12):29-32.
[12] 李永堂,雷步芳,高雨茁. 液压系统建模与仿真[M]. 北京:冶金工业出版社,2003.
[13] 李伟, 马吉胜, 狄长春, 等. 供料机机电液耦合动力学仿真研究[J]. 机床与液压, 2011, 39(9): 114-117.
LI Wei, MA Ji-sheng, DI Chang-chun, et.al. Research on mechanical-electrical-hydraulic coupling dynamic simulation of feeding device[J]. Machine Tool & Hydraulics,2011,39(9):114-117.
[14] 刘义, 徐恺, 李济顺. RecurDyn多体动力学仿真基础应用及提高[M]. 北京: 电子工业出版社, 2013.
[15] 伍驭美, 秦伟. 机械设计基础[M]. 北京, 高等教育出版社, 2012:146-155.
[16] 张增. 专业装备机械基础[M]. 北京: 北京工业大学出版社, 1998:213-223.
Rigid-flexible coupled dynamic modeling and simulation for a ramming mechanism based on MFBD
HAO Chiyu1,2, FENG Guangbin2, YAN Pengcheng2, SUN Huagang2, LIU Chao3
(1. Ordnance Engineering College, Shijiazhuang 050003, China; 2. Ordnance Technical Research Institute, Shijiazhuang 050003, China; 3. PLA 92853 Troop, Huludao 125100, China)
In order to clarify dynamic characteristics and key component force bearing conditions of a ramming mechanism for an automatic loading system of a certain artillery, its multi-rigid-body dynamic model was established with RecurDyn. Then dynamic characteristics of the ramming mechanism were obtained through simulations and experimental data were used to check and ensure the model’s credibility. Based on MFBD(multi-flexible-body dynamics), the rigid-flexible coupled dynamic model of the ramming mechanism was established after completing flexibility of key components, the stress diagrams of key components in ramming process were obtained to determine the dangerous point location. The analysis results provided a guidance for studying failure mechanism, fault evolution law and fatigue property of ramming mechanisms.
ramming mechanism; multi-flexible-body dynamics; rigid-flexible coupled; Recur Dyn
装备预研基金(9140A27020215JB40002)
2015-03-25修改稿收到日期:2015-07-06
郝驰宇 男,博士生,1991年8月生
冯广斌 男,博士 研究员,1965年4月生
TH132.45; TP319; TJ3
A
10.13465/j.cnki.jvs.2016.15.027
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
金属加工(热加工)(2022年1期)2022-02-14
石油沥青(2021年5期)2021-12-02
山东冶金(2021年2期)2021-05-17
文化创新比较研究(2020年7期)2021-01-13
小资CHIC!ELEGANCE(2021年46期)2021-01-11
中国自行车(2020年2期)2020-04-26
当代陕西(2019年13期)2019-08-20
科技资讯(2016年5期)2016-08-13
汽车维修与保养(2015年8期)2015-04-17