
基于Laguerre多项式的LVDT位移传感器非线性校正*
2016-09-08 09:29谭永宏曾喆昭
传感器与微系统 2016年9期
谭永宏, 曾喆昭
(1.湖南科技学院 实验实训中心,湖南 永州 425199;2.长沙理工大学 电气与信息工程学院,湖南 长沙 410076)
基于Laguerre多项式的LVDT位移传感器非线性校正*
谭永宏1, 曾喆昭2
(1.湖南科技学院 实验实训中心,湖南 永州 425199;2.长沙理工大学 电气与信息工程学院,湖南 长沙 410076)
针对线性可变差动变压器(LVDT)位移传感器输出电压值与位移量之间存在非线性的问题,建立了基于Laguerre多项式的位移特性曲线模型。采用递推最小二乘法对标定样本数据进行拟合,以确定位移特性曲线的模型参数。该方法根据LVDT位移传感器输出电压的测量值即可高精度计算出相应的位移量。仿真结果表明:绝对测量误差不超过0.1 mm,具有明显的非线性校正效果,在位移检测领域具有重要的理论和应用价值。
线性可变差动变压器位移传感器; 位移特性曲线; 曲线拟合; 递推最小二乘法; Laguerre多项式
TP 212
A
1000—9787(2016)09—0104—02
0 引 言
线性可变差动变压器(linear variable differential transformer,LVDT)位移传感器是一种线性可变差动变压器,由于其良好的工作特性和环境适应性等优点,已成为目前广泛应用的位移检测部件[1~4],然而与其它传感器一样,LVDT位移传感器也同样不可避免存在非线性特性,在实际应用过程中需要进行非线性补偿以有效提高检测精度。有关传感器非线性校正方法主要分为硬件校正和软件校正两大类非线性校正方法。由于硬件校正方法受技术极限的限制,难以进一步提高传感器测量精度,因此,目前更倾向采用软件算法来实现非线性校正[5~10]。软件校正方法中,如典型的查表法和线性插值法[11]等传统的线性化处理算法,由于需要存储大量的测量数据,现已基本不采用。基于神经网络的自适应非线性校正方法,由于算法较为复杂,而且程序实现冗长[12]。文献[13]提出了基于切比雪夫最佳逼近的LVDT位移传感器信号处理方法,并取得了良好的测量结果;文献[14]使用基于代数多项式曲线拟合的非线性校正方法也取得了良好的测量结果。
1 Laguerre多项式曲线拟合模型
1.1Laguerre多项式定义
当x∈∞时,Laguerre多项式定义为
Ln(x)=(2n-1-x)Ln-1(x)-(n-1)2Ln-2(x)
n=2,3,…
(1)
式中L0(x)=1,L1(x)=1-x。
1.2LVDT位移传感器的电压—位移特性拟合曲线模型
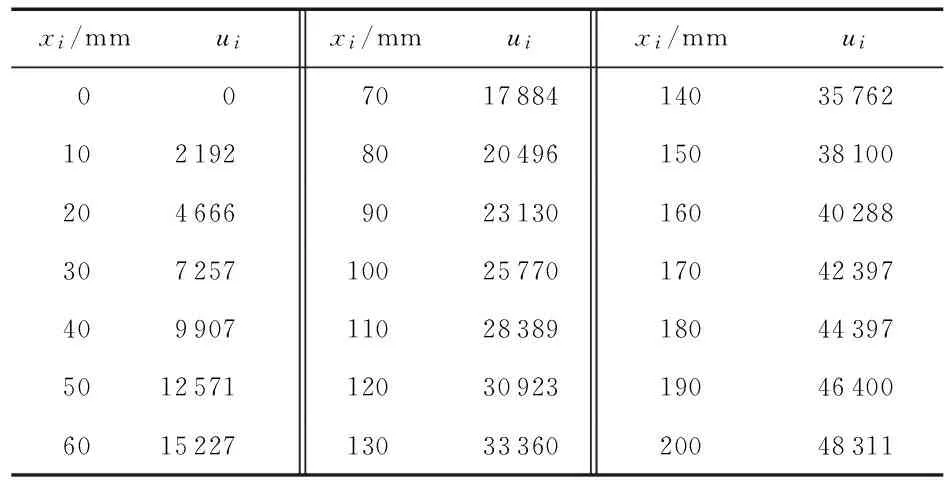
为了便于分析,取文献[15]的LVDT位移传感器在标定点的测量数据如表1所示。其中,xi是给定的标定点位移;ui是对应标定点的A/D转换电压值。
从“光与色”的角度来看,画家在此借鉴了印象派的外光技巧和色彩表现。窗外射入的强烈阳光使少女和桃子都处在一片柔和的逆光之中,而宽敞明亮的墙壁和台布又反射出温和的光线,使处于背光的少女仍不失光辉。谢洛夫在此采用浅蓝灰、淡绿、粉红和嫩黄等各种明亮色彩,构成了一幅近乎透明的新鲜画面。这些接近糖果色的色彩不禁令人联想到活力四射的青春与甜蜜芬芳的气息。作品的整体色彩可谓艳而不俗,亮而不耀,使人仿佛能闻到桃子诱人的香味,感受到少女袭人的青春气息。
以表1的电压值ui作为非线性校正模型的输入,以标定点位移量xi作为拟合样本数据,以y(ui)作为非线性校正模型的输出,则基于n阶Laguerre多项式曲线拟合的非线性校正模型表示为
(2)
式中cj为拟合曲线的模型参数,且j=0,1,…,n。
为了便于分析,设:C=[c0,c1,…,cn]T,A(i,:)=[1,L1(ui),…,Ln(ui)],则式(2)可改写为
y(ui)=A(i,:)C
(3)
1.3最优拟合曲线模型参数更新算法
下面讨论使用式(3)对表1所示的测量数据进行拟合,以获得最优拟合模型参数,具体方法如下:
设位移值拟合误差为
e(i)=xi-A(i,:)C
(4)
式中xi为表1所示的第i个位移标定值。
性能指标为
(5)
为了使性能指标J最小,即minJ,采用递推最小二乘法来确定模型参数向量C,具体算法描述如下[15]
(6)
Ci+1=Ci+Die(i)
(7)
(8)
式中初始协方差阵P0=αI∈R(n+1)×(n+1),α=106~1016。λ是遗忘因子,通常取0.96≤λ≤1。当参数变化快时,λ取小点;变化慢时,取大点。当λ=1时,该递推公式成为基本递推最小二乘算法。
根据式(4)~式(8)对表1所示的所有样本数据进行迭代训练后,可以获得一组最优的多项式模型参数,使式(2)所示的Laguerre多项式模型逼近表1所示的LVDT位移传感器在标定点的值。
2 仿真实验
为了验证本文方法的有效性,以表1所示的测量数据作为试验对象,在仿真试验中,取α=106,λ=1,n=8 (8阶Laguerre多项式),仿真结果如图1所示。最优拟合曲线的参数为
c0=0.008 427 503 061 83;
c1=-0.004 904 632 909 21;
c2=-0.000 000 196 794 38;
c3=-0.000 000 000 000 58;
cj=0.000 000 000 000 000,(j=4,5,6,7,8)
由图1可知,基于Laguerre多项式曲线拟合的LVDT位移传感器非线性校正方法具有较高的校正精度,绝对误差小于0.1 mm。
为了进一步验证最优拟合曲线的非线性校正功能,随机选取3个电压测量值分别为:4 123,14 321,47 654,经过最优拟合曲线非线性校正后,分别得到相应的位移量为:17.897 6,56.599 6,196.572 8 mm。
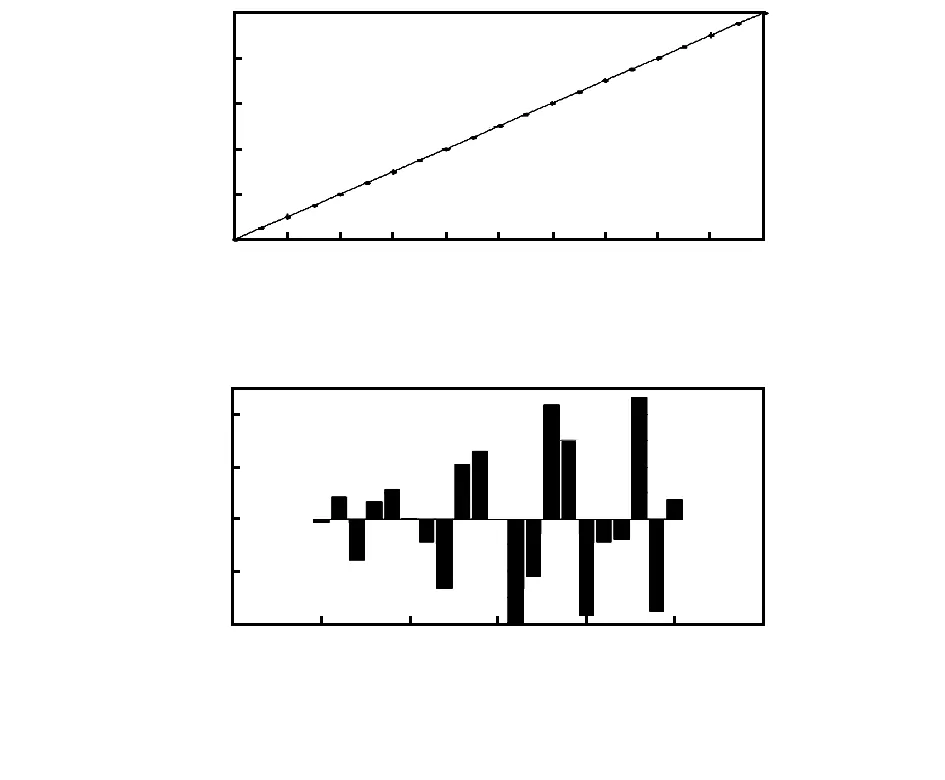
图1 LVDT位移传感器非线性校正
3 结 论
本文提出了基于Laguerre多项式的LVDT位移传感器的电压—位移特性曲线拟合模型,并使用递推最小二乘法对Laguerre多项式曲线模型参数进行优化计算。仿真结果表明:电压—位移特性的优化曲线模型完整刻画了LVDT位移传感器的电压—位移特性的函数关系,根据被测的LVDT位移传感器的电压转换值即可高精度计算出LVDT位移传感器的实际位移值,为位移测量领域的非线性校正提供了良好的理论方法。
[1]尹成竹,柏受军,黄平,等.一种基于AD598的精密位移传感器的研制[J].传感器与微系统,2007,26(2):68-70.
[2]贾伯年,俞朴,宋爱国.传感器技术[M].3版.南京:东南大学出版社,2007:79-86,816-821.
[3]成贤锴,查卿,钟君,等.基于LVDT位移传感器狭缝调整装置的研制[J].实验室研究与探索,2013,32(11):43-46.
[4]柏受军,王鸣,郎朗,等.LVDT位移传感器电压电流转换电路的设计[J].传感器与微系统,2012,31(4):113-115.
[5]伍泓屹,陈波,俞舟平.基于温度传感器的DAC非线性补偿系统设计[J].传感器与微系统,2011,30(9):82-84.
[6]吴志祥,周祥才,黄亮,等.多项式直接拟合在铂电阻高精度测温中的研究[J].自动化与仪表,2014,35(2):57-60.
[7]曹敏,王恩,李博,等.FBG位移传感器的标定与不确定度分析[J].传感器与微系统,2016,35(4):35-37.
[8]方益喜,雷开卓,张群飞, 等.基于噪声抵消技术的高精度温度测量系统[J].计算机测量与控制,2013,21(8):2074-2076.
[9]谢煜,杨三序,李晓伟.基于反拟合法的电容称重传感器非线性校正[J].仪器仪表学报,2007,28( 5):923-927.
[10] 谢兴娟.一种基于谐振腔结构的微波位移传感器[J].传感器与微系统,2015,34(6):99-101.
[11] 吴晓帆,蔡自兴.传感器输出信号的线性化处理[J].自动化仪表,1998,19(7):37-39.
[12] Saroj Kumar Mishra,Ganapati Panda.A novel method of extending the linearity range of linear variable differential transformer using artificial neural network[J].IEEE Transactions on Instrumentation and Measurement,2010,59(4):947-953.
[13] 汪首坤,彭建敏,刘洋.基于切比雪夫最佳逼近的LVDT位移传感器信号处理[J].北京理工大学学报,2013,33(3):271-275.
[14] 柏受军,杨元园,王鸣,等.基于AD C845的LVDT位移传感器非线性补偿[J].传感技术学报,2013, 26(4):541-544.
[15] 曾喆昭,黄创霞,周富照.数值计算方法与应用[M].北京:科学出版社,2013.
曾喆昭,通讯作者,E—mail:508984293@qq.com。
Nonlinear correction of LVDT displacement sensor based on Laguerre polynomials*
TAN Yong-hong1, ZENG Zhe-zhao2
(1.Experimental Training Center, Hunan University of Science and Engineering,Yongzhou 425199,China; 2.College of Electric and Information Engineering,Changsha University of Science and Technology,Changsha 410076,China)
Aiming at nonlinear problem between output voltage and displacement of linear variable differential transformer(LVDT)displacement sensor,displacement characteristics curve model based on Laguerre polynomials is established The parameters of characteristic curve model are determined by fitting calibration sample data and using recursive least square(RLS)algorithm.The corresponding displacement can be calculated with high precision according to measured value of output voltage of the LVDT displacement sensor.Simulation results show that absolute measurement error is less than 0.1 mm,and has obvious nonlinear correction effect,and the method has important theoretical and application value in the field of displacement detection.
linear variable differential transformer(LVDT)displacement sensor; displacement characteristics curve; curve fitting; recursive least squares (RLS); Laguerre polynomials
10.13873/J.1000—9787(2016)09—0104—02
2016—06—12
湖南省自然科学基金资助项目(2015JJ6043);湖南科技学院重点学科建设资助项目
谭永宏(1975-),男,湖南永州人,硕士,副教授。研究方向为嵌入式系统,控制理论和应用,模式识别。
猜你喜欢
气象学报(2021年2期)2021-05-13
现代计算机(2020年31期)2020-12-28
国学(2020年1期)2020-06-29
汽车维修与保养(2020年11期)2020-06-09
数学大世界(2020年2期)2020-03-07
价值工程(2017年31期)2018-01-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
