
弹道修正弹中舵机的控制
2016-09-05 01:21吴玉斌郝永平张进超张福新
沈阳理工大学学报 2016年3期
乔 磊,吴玉斌,郝永平,张进超,张福新
(沈阳理工大学 兵器科学技术研究中心,沈阳110159)
弹道修正弹中舵机的控制
乔磊,吴玉斌,郝永平,张进超,张福新
(沈阳理工大学 兵器科学技术研究中心,沈阳110159)
为对弹道修正弹舵机进行控制,实现高速旋转稳定弹丸的二维修正,提出电压调速控制电机的方法。以转台运行模拟弹丸在空气中的飞行,设计出斩波控制电路,并对控制电路和控制算法进行改进,通过改变占空比控制电磁转矩,对电机进行控制。实验结果表明,电压调速控制电机的方法控制准确性、快速性和稳定性好,抗过载能力较好,能够对舵机进行有效控制,为二维弹道修正执行机构的电机调速提供了依据。
弹道修正;霍尔传感器;永磁电机;控制方法
二维弹道修正是指对弹丸的横向和纵向进行修正,通过改变俯仰力矩和偏航力矩来控制弹丸的飞行;提高修正准确度的关键是对弹丸减旋。在弹丸飞行到修正阶段时,对舵机进行控制,弹载计算机根据弹丸弹道偏差发出修正指令,控制修正舵机的空间姿态,利用空气动力学理论使弹丸在空气中飞行时达到理想的运行轨迹。
永磁直流电机大多数都是微型电机,具有结构简单、可靠性高、重量轻、效率高的特点,由于弹丸内部空间有限,采用永磁直流电机作为控制电机[1]。永磁电机的调速方法主要有三种:电枢回路串电阻调速、改变主磁通调速及改变电压调速。其中电枢回路串电阻调速只能由额定转速向下调节,调速范围小,当负载变化时,转速变化大,效率较低。主磁通调速中的磁通不易调节,且永磁体的磁导率较小,调速方位会受到限制。而改变电压调速方式平滑性好,可实现无极调速,调速范围广,稳定性好。李新福等[2]采用电枢回路串电阻调速的控制方法实现了弹道修正机构中电机的控制。星生智[3]采用改变主磁通的方法,实现了电机转子磁通的完全可控。本文采用改变电压调速的控制方法,实现对电机电磁转矩的控制;该方法可形成闭环系统,自动化程度高,系统结构更加小型化。
1 永磁直流电机的工作特性
1.1永磁直流电机的转矩特性
转矩特性是指外加额定电压UN时,电动机的电磁转矩Tem和电枢电流Ia之间的关系:
(1)
式中:Tem为电磁转矩(N·M);φ为每极气隙磁通(Wb);N为电枢绕组总导体数;a为电枢绕组的并联支路对数;CT为转矩常数;P为极数。
由式(1)可知,当电枢电流增加时,若每极磁通φ不变,则电磁转矩为通过原点的直线,但每极磁通随电枢电流的增大而略有减小,所以电磁转矩的增加比电流的增加略慢,如图1所示。

图1 永磁直流电机的转矩特性
1.2永磁直流电机的机械特性
机械特性是指外加额定电压UN时,电动机转速n与电磁转矩之间的关系:
n=f(Tem)


当每极磁通不变时,机械特性是一条下降的直线。由于电枢电阻较小,机械特性的斜率很小。随着电磁转矩的增大,电枢反应的去磁作用略微增强,磁通不是常数,机械特性也不再是一条直线,而是在下端略有增大。
2 模拟实验转台
2.1实验转台结构及原理
模拟实验用一个控制电机和阻尼电机。控制电机在不同电压时,电机的转速不一样,所以由阻尼装置产生的风阻力矩也不一样,能更好的模拟实际的风阻。利用霍尔传感器对阻尼电机的轴转速和位置进行检测并反馈到控制系统,控制系统根据事先定好的设计方案,使阻尼电机保持在稳速、停和正反转状态,来实现对阻尼电机转速的控制[4]。结构原理如图2所示。

图2 试验转台示意图
开始对两个电机通电时,此时风阻力矩比控制电机力矩大很多,油盒转速较快。为保持低速状态,控制系统将根据霍尔传感器检测到的实际转速与预设的转速进行比较,然后通过单片机发出指令控制外围电路,达到预设的转速后,再进行下一个操作。
2.2外围控制电路
模拟实验分别采用两种控制电路,一种是电枢回路中串接外加电阻;另一种是利用斩波的电压调速方法。第一种方法采用单片机STC89C58RD作为主控制器,利用康铜丝模拟可控电阻,通过控制场效应管的开和关来调整电阻的阻值,如图3所示。
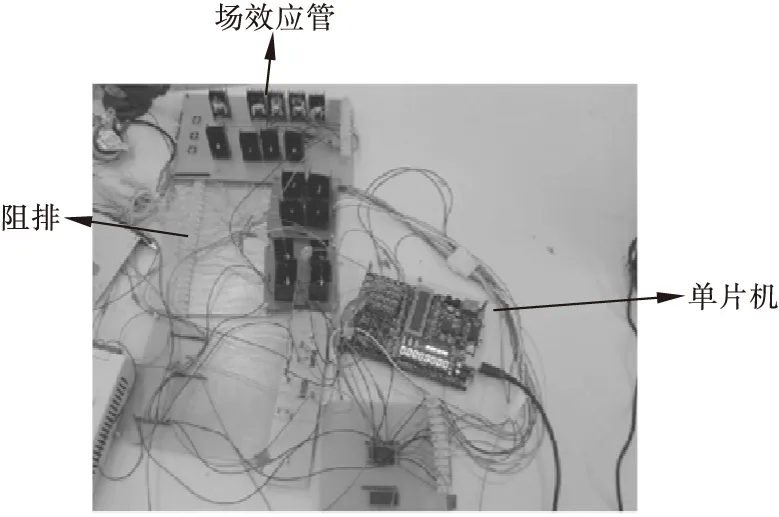
图3 电枢回路中串接外加电阻电路图
由于电枢回路串电阻方法控制模块所占的空间尺寸比较大,且电阻细分化较困难,场响应管工艺集成化比较难以实现,所以采用斩波调压调速方法。斩波调压调速方法采用单片机STC15W404AS作为核心,驱动电路主要由光电耦合和图腾柱电路形成放大电路,使5V信号电压放大为15V信号电压,来快速启动场效应管,在输出端输出PWM波形。弹丸发射后,霍尔传感器测得舵片转速,通过调节PWM占空比,使电机产生合适的转矩,确保弹体处于高速旋转状态时,舵片依然可以保持低转速,使舵机不受弹体转速的影响,从而达到修正弹的减旋。原理图及波形如图4、图5所示。

图4 电压调速控制系统驱动电路
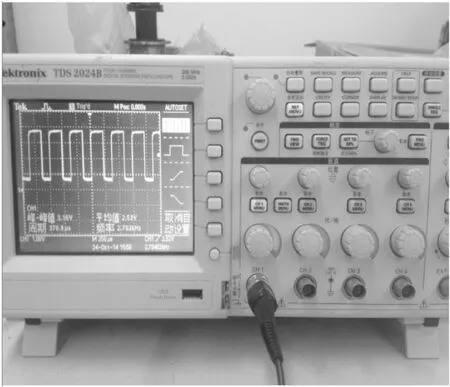
图5 斩波控制电路的脉冲在固定占空比下的波形
在以霍尔传感器构成的测速系统中,利用霍尔传感器的输出脉冲频率和转速成正比的原理,根据脉冲发生器发出的脉冲速度和序列,测量转速和判别其转动方向。根据脉冲计数来实现转速测量的方法主要有:M法(测频率法)、T法(测周期法)和M/T法(频率/周期法)[5]。M法在转速脉冲信号的数量较大时,测量才有较高的准确度,因此适合高速场合。T法是测量霍尔传感器所产生的相邻两个转速脉冲信号的时间来确定转速,适合低速场合。M/T法是前两者的结合,虽然具有较高的测量精度,但是实时性差。本文采用T法测速。
3 模拟实验结果及分析
采用电枢回路串电阻方法的实验中,需要测定每个电阻下所对应的电磁力矩。因此,先保持电机两端的电压不变,改变电阻值,即可得出电阻值与电磁力矩之间的关系,表1是通过实验测得的数据。为更清晰表达阻值与电磁力矩间的关系,本次实验最大采用了13Ω的阻值;若电阻过大,对舵机的控制力就会减弱,因此,更高的阻值不再考虑。试验在每个阻值下测量六次,然后取其平均值作为测试数据,保证实验的准确性,结果见表1。

表1 电阻与电磁力矩的关系
采用Matlab对表1数据进行曲线拟合,结果如图6所示。从图中可以看出,电磁力矩与控制电路阻值虽然有相同的变化趋势,但并非是线性关系。
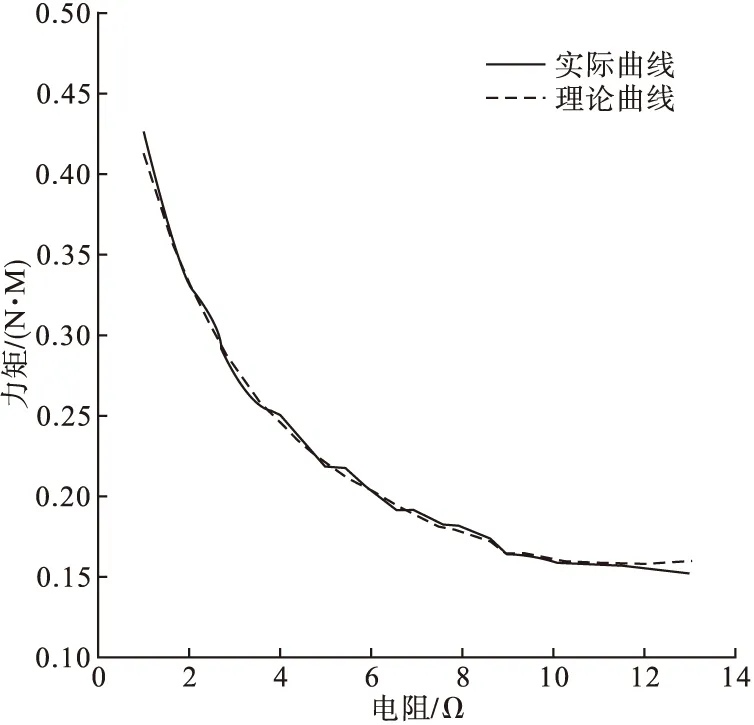
图6 电磁力矩随电阻阻值的曲线变化
电压调速的方法是使直流电机在额定功率下通过改变占空比来控制电机转矩。实验前先将控制电机的绕组经过整流电路,串联后在外部接入康铜丝电阻(阻值为2Ω),并把斩波控制电路接入电枢绕组回路;当转子速度达到6000r/min后,启动斩波控制电路,改变占空比,并分别在不同占空比的情况下,通过测力传感装置测出转矩值的变化量。同时斩波频率保持在2.1kHz,额定电压24V,在电机旋转稳定后测量电机转矩。同样在每个占空比下测量六次,取其平均值作为测试数据,结果见表2。

表2 占空比与电磁转矩的关系 N·M
采用Matlab对表2数据进行曲线拟合,结果如图7所示。由于每极磁通φ随电枢电流变化而改变,所以斩波占空比同电磁转矩是近似线性关系。
对比两组数据与曲线,可以看出,以上两种方法都可实现对电磁转矩的控制,但第一种方法的外围控制电路无法小型化,就实际应用而言,第二种控制电路更简单,更适合应用于弹道修正弹。

图7 电磁转矩随斩波占空比的变化
4 结束语
介绍了霍尔传感器的测速以及弹道修正弹舵机减旋的控制方法,经过理论分析和转台实验,结果表明电压调速方法的人为机械特性好,能达到相应的控制准确性、快速性和稳定性,在实验过程中控制系统的抗过载能力较好,基本能够达到二维弹道修正系统对气动舵机的控制要求,为进一步研究弹道修正提供了很好的参考依据。
[1]王秀和,李光友,杨玉波.永磁电机[M].北京:中国电力出版社,2010.
[2]李新福,陈柏宁,郝永平,等.弹道修正执行机构中电机的控制方法研究[J].成组技术与生产现代化,2014,9(3):36-40.
[3]星生智.内置混合式转子可控磁通永磁同步电机及控制方法研究[D].天津:天津大学,2007.
[4]王萍,王正茂,姚刚,等.无刷直流电机中霍尔元件的空间配置[J].微电机,2003,36(6):16-18.
[5]赵树磊,谢吉华,刘永锋.基于霍尔传感器的电机测速装置[J].江苏电器,2008,28(10):53-56.
(责任编辑:赵丽琴)
The Control of Steeringengine Trajectory Correction
QIAO Lei,WU Yubin,HAO Yongping,ZHANG Jinchao,ZHANG Fuxin
(Shenyang Ligong University,Shenyang 110159,China)
For the control of the steering engine of trajectory correction projectile,realization of two-dimensional correction of high-speed rotating stable shells, the method to improve correction accuracy is proposed,by contrelling the motor projectile.By running the turntable to simulate the flight of the shell in the air,two effective programs of correction motor are preposed.A drive circuit is designed and the control circuit and control algorithm are improved.The simulation results show that this method can control the steering engine.The research provides a basis for two-dimensional trajectory correction actuator to motor speed.
trajectory correction projectiles;hall sensor;permanent magnet motors;control method
2015-08-31
国家863计划资助项目(2009AA04Z167)
乔磊(1989—),男,硕士研究生;通讯作者:吴玉斌(1963—),男,副教授,研究方向:弹药工程。
TJ765.2
A
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
弹箭与制导学报(2020年1期)2020-07-09
自动化学报(2019年6期)2019-07-23
弹箭与制导学报(2019年6期)2019-06-24
传感器与微系统(2018年7期)2018-08-29
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
电测与仪表(2015年3期)2015-04-09
