
魔方机器人控制系统设计
2016-09-05 01:11:40张艳珠古长军王凡迪朱啸天
沈阳理工大学学报 2016年3期
张艳珠,古长军,王凡迪,朱啸天
(沈阳理工大学 信息科学与工程学院,沈阳 110159)
魔方机器人控制系统设计
张艳珠,古长军,王凡迪,朱啸天
(沈阳理工大学 信息科学与工程学院,沈阳 110159)
基于ARM的多自由度魔方机器人能够将任意打乱的三阶魔方快速还原。在研究各种魔方机器人机构的基础上,设计了一种体积小、速度快、性能稳定的机械结构,能使魔方机器人适应不同环境。通过嵌入式系统在魔方机器人控制中的应用,改变了现有魔方机器人的控制结构和功能,提高了机器人控制的灵活性、开放性和实时性、功能性。针对当前魔方机器人视觉系统的研究,提出了一种基于嵌入式的视觉检测方案,满足低成本、稳定性强的要求,能够适应复杂光照环境。
机器人;嵌入式控制系统;魔方;机械结构;视觉检测
机器人是一种智能化的产物,技术含量高,能够引起人们极大的兴趣,激发人们的研究热情。魔方机器人集机械设计、系统控制、机器视觉于一身,拥有很多机器人的优点,很容易将其技术用于工业生产完成特定的功能。文献[1]中魔方的视觉检测算法效果较好,但是其机械结构仅仅由两个臂组成,在旋转过程中,会增加很多步来考虑魔方的整体旋转;文献[2]给出了魔方求解的基本算法,但是算法步骤太多,会使机械手转动过程变长;在文献[3]中机械手设计低成本、体积小,但是魔方转动的速度较慢,稳定性也不强。针对现有的魔方机器人的存在成本高、体积大、性能不稳定,普及程度低等问题。本文提出设计一种低成本、体积小、性能稳定、普及性强的机器人,能快速还原魔方。通过嵌入式系统的运用,改变了机器人的控制结构和功能,能够对场景有很强的适应性。通过对当前视觉系统的研究,提出一种基于嵌入式的视觉检测方法,满足低成本、稳定性强的要求,能够适应复杂光照环境,具有很强的鲁棒性。
1 魔方机器人总体方案设计
基于ARM(Advanced RISC Machines)的多自由度魔方机器人是一个能够将任意打乱的三阶魔方快速还原的机器人。它涉及魔方视觉跟踪、魔方数据采集、魔方解耦算法、机械手控制系统以及魔方机器人3D旋转系统。该机器人的最大特点是:完全由ARM控制、体积小、结构简单、成本很低,能够大量的普及。通过嵌入式系统在魔方机器人控制技术中的应用,可以使得机器人向小型化、微型化方向发展。图1为机器人控制系统,主要由LCD显示、视觉系统、机器人3D旋转系统和机械手控制部分组成。

图1 机器人控制系统
2 硬件设计
2.1机械结构设计
机械结构是实现魔方复原的最基本的部分。目前国内外的魔方机器人机械结构主要有类人双臂式和四轴旋转式结构。相比之下,四轴旋转结构能够使魔方整体旋转的次数更少,能减少系统运行的时间。本文采用四轴旋转结构来设计魔方机器人。四轴旋转结构能够在魔方的前后左右四个面来转动魔方,大部分性能稳定的四轴设计结构成本高且体积大。廉价的四轴结构大多设计比较粗糙,很难达到稳定性的要求。
机械结构的主要任务是能够实现魔方的夹持、单面旋转以及魔方整体旋转。机械结构包括两个底面圆、四个方向的铝板、以及四个方向的二自由度机械手(图2)。其中底面圆的重叠结构具有很好的视觉效果,给人一种立体的感觉;四个方向的铝板用来固定机械手;四个方向的机械手用来夹持并旋转魔方。

图2 机械结构
2.2魔方位置的校验调整
魔方机器人在运动过程中受到外力的干扰容易使魔方的位置发生微小的变化,经过N步的积累将使误差越来越大,甚至达到不可控的状态。在机械手爪的位置加一个楔形结构能够很好地解决上述问题(图3)。以A、C两个机械手进行受力分析(B、D机械手类似),魔方是一个正方体,在A、C方向与机械手有四个接触点。E、F、G、H
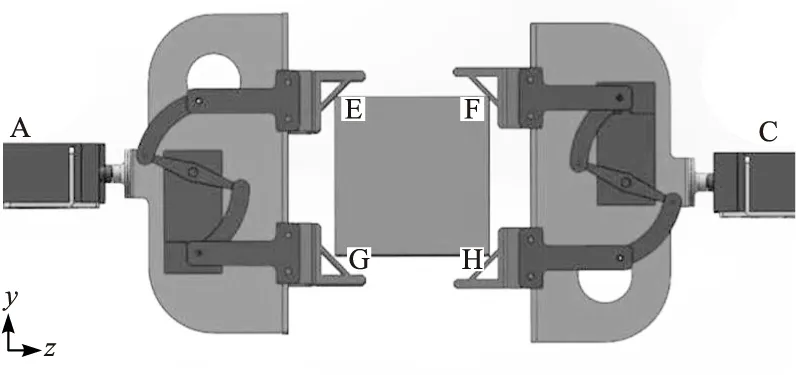
图3 机械手结构图
点的受力(图4)。当魔方受到机械手爪的四个楔形结构的挤压,能够自动地调整魔方所处位置,避免由于力矩过大,使魔方在转动过程中被损坏。使整个转动过程有一定的活动空间。

图4 魔方在机械手爪处受力图
图中:mg为魔方受到的重力;f1为魔方受到上面的楔形结构的挤压力;f2为魔方受到下面的楔形结构的挤压力。
2.3电气系统设计
魔方机器人的电气控制系统主要包括控制中心、传感器、通信系统。图5详细介绍了控制器连接的各个控制模块,主要包括摄像头、液晶显示、串口通信、机械臂等。
(1) 控制中心:使用意法半导体公司的STM32F103ZET6作为MCU,主频72M,拥有很多外设接口能够满足控制的需要[4]。
(2) 传感器:机器人中主要用到的是摄像头,在机器人的视觉部分用摄像头读取魔方的数据,这个过程对数据传输的抗干扰能力要求较高,为此在电路中设计了电容滤波电路。使数据传输和供电线路相互不干扰。使采集回的RGB数据准确可靠。
(3) 通信系统:通信系统采用两路串口通信,第一路是ARM主控中心与舵机控制器通信,控制电机动作组的正常运转;第二路为ARM主控中心与PC机通信实现3D旋转系统的数据传输。
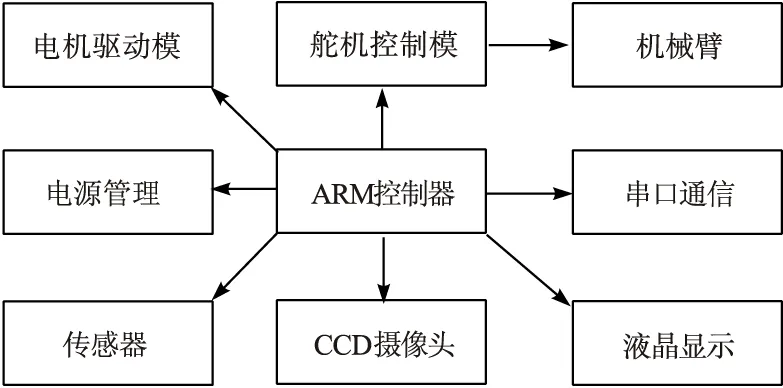
图5 机器人控制系统功能设计图
3 软件设计
机器人的软件设计部分主要包括视觉子系统设计、魔方数据库建立及处理、机械手动作组控制及3D旋转系统。图6为机器人算法结构图,主要包括视觉系统、机械手动作、3D旋转系统和数据库建立处理。

图6 机器人软件框架图
3.1视觉子系统设计
RGB是一种以硬件为导向的色彩模型,RGB颜色空间通过三原色的叠加描述所有的颜色,直接从颜色生成的角度去描述颜色,在几何上可以表示成一个立方体。
同种色相的颜色在不同的亮度下其R、G、B值均有较大的变化,难以对某种色相的颜色标定一个通用的参考值。与RGB色彩模型相比,HSL更好反映了“饱和度”和“亮度”。HSL颜色空间模型较RGB颜色空间模型更适合用于对物体颜色进行识别[5]。第一,去掉亮度分量在图像中与颜色信息的关系;第二,色调分量作为颜色的唯一标识分量(黑色和白色除外)。HSL颜色空间模型对外界光照敏感度比较低,比较适合用于彩色图像的分割[1]。
通过摄像头返回的数字图像存储的信息为像素的RGB颜色值,需要将图像的RGB颜色空间转换为HSL颜色空间描述,为进一步处理做准备。HSL颜色空间模型与RGB颜色空间模型的对应转换关系。
(2)
(3)
式中:h表示色度;l表示亮度;s表示饱和度。
摄像头采集图像然后并行传输到ARM处理器,先对图像进行预处理[6]、图像分割、图像的特征提取,然后对魔方进行定位追踪。魔方每个面最明显的特征是两条横着的和两条竖着的黑线,首先遍历整个图像寻找四条黑线,然后在每条黑线各取一个坐标点,上下两条线的纵坐标之和的均值为魔方中心的纵坐标y0,左右两条线横坐标的均值为魔方中心的横坐标x0。即使魔方位置变化依据这个原理可以实时的寻找到魔方的中心位置(图7),从而实现魔方的追踪,中心点确立后,依据魔方色块的位置关系可以直接定位每个色块的位置。

图7 魔方追踪原理图
魔方的颜色包括红、橙、黄、绿、蓝、白六种颜色。魔方追踪确立每个色块中心点的位置后,每个色块的中心点附近取ROI的均值,和魔方六种色块颜色进行比对,在阈值范围内则标定为相应的颜色。在外界复杂的光照条件下,因为颜色、密度、光照和背景会产生变化,经过试验发现个别色块容易发生颜色识别错误,其中黄、绿、蓝、白四种颜色的色块,只需要通过阈值法很容易判别。当外界光照不稳定时,红色和橙色容易相互干扰,最后使整个魔方的数据产生错误。为了解决这一问题,采用补光的方法,使用一个条形灯斜45度入射与摄像头正对的平面。最后使机器人在复杂的光照环境中也能顺利完成任务。
(4)
(5)
3.2魔方数据库建立及处理
3.2.1魔方数据建立
一幅图像可以视为一个数据库,即图像中每个点的位置和颜色信息可视为数据库中的一条记录。色块提取是为了方便魔方谜题算法的求解与实现,从而实现魔方机器人系统的可行性以及操纵的灵活性,因此需要将立体魔方获取的图像,转换为平面化的色块图像并显示,由视觉检测算法获取整个魔方色块颜色分布,并在算法中进行标注。最后存储标注的值在数据库中(表1)。

表1 数据库颜色标注对比
3.2.2魔方算法处理
考虑到嵌入式系统对计算复杂度的限制,采用传统的层先法CFOP,即CROSS→F2L→OLL→PLL如图8所示。对于一个随机打乱的魔方,CFOP算法平均需要70步。

图8 魔方算法处理
图8中:CROSS:完成底层十字,即还原底层四个棱块,使之位置和方向全部正确;F2L:完成前两层,还原前两层的四个角块和四个棱块,使之位置和方向全部正确;OLL:完成顶层所有块的方向还原,即一次性还原顶层的四个角块和四个块的方向;PLL:完成顶层所有块的位置还原工作,即一次性还原顶层的四个角块和四个棱块的位置,从而还原整个魔方。
3.3机械手动作组控制
机械手由八个舵机组成,如果用ARM直接控制八个电机,会增加CPU处理的负担。因此选用舵机控制器直接对八个舵机进行控制。ARM只需通过串口发送指令即可完成一个或者多个舵机的实时控制。使整个系统简化并且大大减少了主CPU处理的负担。
魔方由六个面组成,在采集魔方颜色时摄像头固定,因此只能采集一个面的数据,通过机械的转动使魔方整体翻转,把每个面翻转到上面,完成图像采集。四个机械手按顺时针方向标号为A、B、C、D,如图2所示。A、C同时竖直张开,B、D夹持魔方顺时针同时转动90度即可完成一次翻转。其它各个面的整体翻转类似。四个机械手相互配合可以完成魔方整体顺(逆)时针转90度,顺(逆)时针转180度,前后左右四个方向均可完成这些动作。需要转动顶面和底面的时候只需使魔方整体翻转一次,顶面和底面达到侧面的位置,再完成需要的转动,最后使魔方沿着相反的方向逆向翻转一次即可。以顺时针转动顶面90度为例,向A侧翻转,程序框图如图9所示。

图9 机械手动作组运动
3.4机器人3D旋转系统
机器人3D旋转系统提供一个人机交互的平台,它可以在计算机上实现魔方的三维逼真效果,如图10所示。可以让用户手动操作魔方的旋转,可以自动演示魔方打乱后任意状态的复原。
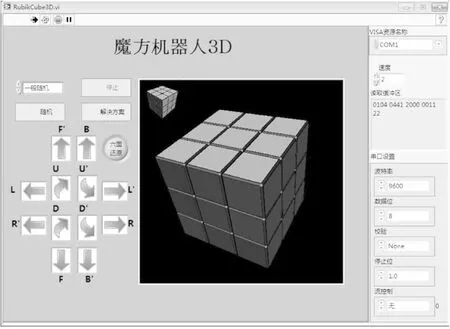
图10 机器人3D旋转系统显示界面
3D旋转系统的核心是在计算机显示系统内部集成了一个魔方求解算法CFOP,不仅可以还原整个魔方,还可以通过按钮调整每个面的旋转。如果魔方机器人的目的是为了还原魔方,那么3D旋转系统为了配合机器人进行魔方的三维重构并显示。开始需要把一个解好的魔方逆解成实际魔方的状态。这是解算魔方的逆过程,然后通过ARM与PC机串口通信,由ARM发送指令,PC端接收指令,使3D魔方的旋转与机器人的旋转动作一致。
机器人3D旋转系统并不局限于做一个随动系统,它有自己独立的功能,它可以自由打乱任意一个魔方并自动解算,旋转系统内部拥有一个独立于ARM的算法处理单元,能够独立运行并显示。
4 结束语
在嵌入式处理器的基础上设计并完成了整个魔方机器人,研究其机械结构、机械手受力模型、视觉检测等。最后通过算法计算得到魔方解法平均步数为70步,机器人能够在平均5min自动解算并还原魔方。该机器人成本低,体积小、性能稳定、普及性强,能够对环境有很强适应性。
(1)在研究各种机器人机构的基础上,设计了一种体积小、速度快、性能稳定的机械结构。通过楔形结构的加入,使魔方在转动过程中有一定的活动空间。
(2) 通过嵌入式系统在魔方机器人控制技术中的应用,改变了现在玩魔方机器人的控制结构和功能,提高了机器人控制的灵活性、开放性和实时性、功能性。
(3)通过对当前机器人视觉系统的研究,提出了一种基于嵌入式的视觉检测方案,满足低成本、稳定性强的要求,能够适应复杂光照环境。
[1]黄铭,路思良,孔凡让.魔方还原机器人的视觉子系统设计与实现[J].机械与电子,2013(5):60-64.
[2]何智勇,贲可荣.基于OpenGL的魔方自动求解算法与实现[J].哈尔滨工业大学学报,2004,36(7):893-895.
[3]胡青华.魔方复原机械手的设计与制作[J].中国科技信息,2014(8):221-223.
[4]李栋.基于ARM嵌入式的图像处理研究[D].石家庄:河北科技大学,2010.
[5]冈萨雷斯.数字图像处理[M].北京:电子工业出版社,2007.
[6]杨永敏.嵌入式图像处理系统的研制[D].哈尔滨:哈尔滨工业大学,2006:1-2.
Control System Design of Magic Cube Robot
ZHANG Yanzhu,GU Changjun,WANG Fandi,ZHU Xiaotian
(Shenyang Ligong University,Shenyang 110159,China)
A magic cube robot with multi degree of freedom based on ARM can quickly recover any upset magic cube .Based on studying of a variety of robot structure,the mechanical structure of small volume,high speed and stable performance are designed,which can make the magic cube adapt to the different environment in the rotating process.Through embedded system application in magic cube robot control,the controlling structure and function of the existing magic cube robot are changed,which improves the flexibility,openness and real-time,and functional of robot control.Through the current study of the magic cube robot vision system,a kind of visual detection scheme is put forward based on Embedded System,which can meet the requirements of low cost,high stability and adapt to the complex illumination environment.
robot;embedded control system;magic cube;mechanical structure; visual inspection
2015-04-30
古长军 (1991—),男,硕士研究生,助理工程师;通讯作者:张艳珠(1971—),女,副教授,博士,研究方向:目标识别分数阶控制,智能算法。
TP24
A
猜你喜欢
英语世界(2023年6期)2023-06-30 06:29:32
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
发明与创新·小学生(2023年8期)2023-06-22 09:53:50
红领巾·探索(2023年4期)2023-04-22 07:52:22
趣味(作文与阅读)(2021年9期)2022-01-19 01:25:58
通信技术(2019年12期)2019-12-11 02:23:54
小学阅读指南·低年级版(2016年1期)2016-09-10 07:22:44
通信电源技术(2016年1期)2016-04-16 04:57:29
陶瓷科学与艺术(2016年1期)2016-02-28 16:33:11
小雪花·成长指南(2015年10期)2015-10-23 08:42:15
