
射电望远镜主动反射面系统的控制
2016-08-23 06:31李爱华周国华李国平张振超
光学精密工程 2016年7期
李爱华,周国华,李国平,张 勇,张振超
(1.中国科学院 国家天文台 南京天文光学技术研究所,江苏 南京 210042;2.中国科学院 南京天文光学技术研究所 天文光学技术重点实验室,江苏 南京 210042;3.中国科学院大学,北京 100049)
射电望远镜主动反射面系统的控制
李爱华1,2,3*,周国华1,2,李国平1,2,张勇1,2,张振超1,2
(1.中国科学院 国家天文台 南京天文光学技术研究所,江苏 南京 210042;2.中国科学院 南京天文光学技术研究所 天文光学技术重点实验室,江苏 南京 210042;3.中国科学院大学,北京 100049)
针对新疆奇台110m射电望远镜主动反射面控制技术的要求,设计和研制了一种新型的位移促动器和位移控制系统,并采用双频激光干涉仪对多个位移促动器及其控制系统进行了全面检测。位移促动器采用了基于涡轮蜗杆加滚珠丝杆的高精度结构设计方案,控制器系统采用了ARM微处理器。最后选择S曲线加速控制方法,设计了主动反射面控制系统硬件平台和软件算法。基于双频激光干涉仪和光学隔振平台在恒温超洁净条件下进行了系列测试。结果表明:系统实现了行程范围为30mm,控制精度为5μmRMS的快速精密控制;在额定负载300kg,步长2mm,行程30mm范围内,实测结果平均值与理论值偏差为0.04%,标准偏差为3.67μm。最后,采用测量精度为0.25μm的激光传感器对4块四点支撑的四边形子面板进行了验证检测。结果显示:经多次迭代后主动反射面控制闭环系统的控制精度小于5μmRMS,远远优于3mm波段射电望远镜主动反射面控制的技术要求。
射电望远镜;主动反射面;S曲线加速控制算法;位移促动器;位移控制系统
1 引 言
射电天文学对天体物理研究的多个领域作出了巨大贡献,引起越来越多天文学家的重视,世界各国都在努力突破毫米波射电望远镜的技术困难,以建造更大的高精度的天线和实现对较短波段的观测。为了获得高灵敏度和高角分辨率,射电望远镜的口径越来越大,为实现对较短波段的观测而广泛采用主动反射面技术,即在望远镜的某个反射面上实施主动变形技术以补偿因加工、装调、重力、风载、温度等因素造成的面形误差,或主动调整为某种要求的面形。已建成的美国100mGBT望远镜,工作波段覆盖0.1~116GHz,由2 209 个促动器采用主动反射面技术控制2 004块面板保证4GHz以上的工作效率[1-2];美墨合作的50mLMT望远镜借鉴光学拼接镜面原理,由720个促动器通过精密控制180块面板保证其在1~3mm波段高效运行[3];上海65m天马射电望远镜[4-8]工作频段1.3~46GHz,由1 104个促动器对1 008块面板实时调整,校正反射面对重力和温度引起的变形;贵州500mfast望远镜观测波段70M~3GHz,采用主动反射面技术实时控制天线面形为300m抛物面;在研的有美国25mCCAT亚毫米波望远镜[5-6]和我国新疆乌鲁木齐110m射电望远镜[7]。
中国未来要发展大口径亚毫米波/毫米波射电望远镜,主动反射面控制是实现射电望远镜面板拼接的一项关键技术,在亚毫米波段、毫米波段的应用尚需极大努力和技术突破。面向新疆奇台110m射电望远镜3mm波段观测的主动反射面要求,设计、研制精密位移促动器和高精度位移控制系统。位移促动器采用基于精密涡轮蜗杆加滚珠丝杆的高精度结构设计方案;控制系统采用ARM微处理器,基于S曲线加速控制算法,设计主动反射面控制系统硬件平台和软件算法,并在双频激光干涉仪/毫米波射电望远镜样机系统分别进行测试,满足控制精度优于50μm的毫米波射电望远镜主动反射面控制设计要求。
2 主动反射面系统构成及其工作原理
主动反射面技术中一般4块相邻的面板的4个角点由位移促动器实现位移调整,如GBT望远镜和上海天文台65m天马望远镜,均是过约束支撑,因此要求位移促动器负载较大,以支撑大面板重量、大桁架变形和促动器大行程等各种导致结构变形的轴向和横向应力;同时射电面板本身也具有一定量的可变形调节性能,不会因射电望远镜野外恶劣环境下重力变形和热变形等产生各种应力集中导致结构件破坏,而且四点支撑的促动器分布调整方案能够通过闭环准确控制子面板的面形和拼接,不会因为四点过约束而使得主动反射面性能受到影响。3mm波段根据衍射条件面形精度要求为1/20波长均方根值,即面形精度150μm,考虑到控制系统的精度要求及未来实现亚毫米波主动反射面需求,控制精度要求满足50μm。针对新疆奇台110m射电望远镜(QiTaiRadioTelescope,QTT)的毫米波工作频段,满足其3mm波段观测要求的主动反射面控制基本技术指标为:行程30mm,额定负载300kg,破坏负载700kg,控制速度0.5mm/s,位移精度50μm,位移分辨率1μm。基于此技术指标,设计一种毫米波射电望远镜主动反射面系统,主要包括位移促动器、位移控制器和驱动器。
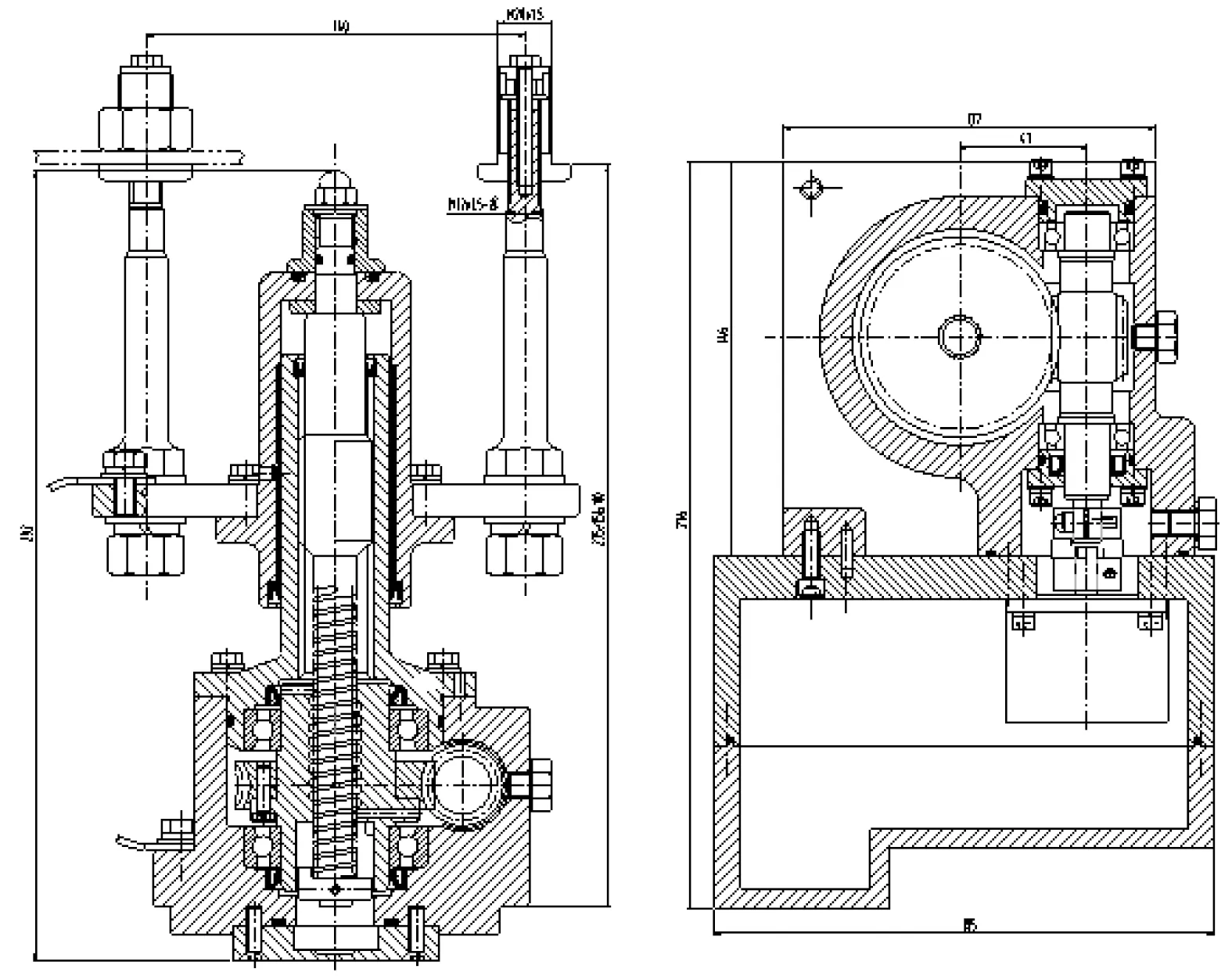
图1 位移促动器机械结构
2.1位移促动器设计
位移促动器是射电望远镜主动反射面的执行元件,其重要的参数为负载能力、精度和行程,对位移促动器的要求具有行程长、精度高及负载大的特点。实际工程设计中,这些要求难以兼顾,基于QTT望远镜毫米波主动反射面的控制指标,位移促动器机械原理如图1所示,由精密蜗轮蜗杆、精密滚珠丝杆、步进电机等组成,步进电机连接精密蜗杆,蜗杆带动固定于滚珠丝杠螺母上的精密蜗轮转动,通过滚珠丝杆将旋转运动转换为位移促动器直线运行,滚珠丝杠底部连接滑动花键,滚珠丝杠顶部与连接反射面板的螺杆组件联结。位移促动器采用基于涡轮蜗杆加滚珠丝杆的减速机构,提高输出转矩,满足额定负载 300kg的设计要求。
对位移促动器在极限破坏载荷工况下,建立有限元模型,进行负载分析。促动器处在上极限位置时,根部位置承受的力矩最大,根据侧向极限破坏负载要求,位移促动器受力700kg(6 860N),由4根立柱共同承受。将力加载在4根立柱顶部的节点上,初步设计方案的仿真分析结果如图2所示,位移促动器缸体部分受力比较均匀,总体应力在100MPa以下,缸体根部圆角处的最大应力为102MPa,缸体部分的应力满足使用要求;但对于立柱,越到根部受到的应力越大,在根部圆角处达到最大值980MPa,不能达到使用要求。为此,后续进一步仿真的有限元参数优化调整后,通过加大根部直径和放大根部圆角,采用调质后的合金钢材料40Cr,最终的优化计算分析结果表明,可使其根部最大破坏应力小于600MPa,这样的结构和材料选择就能满足使用要求。
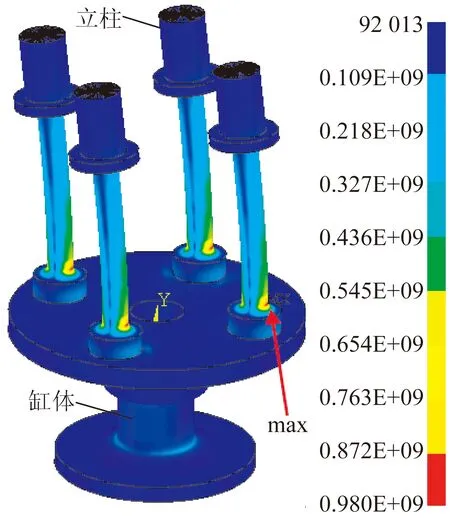
图2 仿真优化前位移促动器总体应力分布
2.2位移控制器设计
控制精度是毫米波射电望远镜主动反射面调整的一个重要参数,位移控制器性能的优劣会直接影响整个位移控制系统的精度。一个良好的控制系统有助于精密位置控制。针对新疆奇台提出的未来110m射电望远镜QTT,主动反射面控制系统对控制器提出如下基本技术要求:实时通讯、位移控制、实时反馈、限位报警等功能;电控设计在满足基本功能的前提下,还要综合考虑电磁兼容、可靠性、稳定性及功耗等各方面因素。
位移控制器选用ARM处理器。ARM具有功耗低、成本低和可靠性高等优点,其操作系统在稳定度、安全性和多任务等方面具有显著优点[9];其丰富的资源可以使控制器同时控制多个促动器。主动反射面控制系统原理如图3所示。脉冲和方向等控制信号首先经译码芯片识别地址,数据总线输出的数据经数据锁存、总线驱动后,进行光耦隔离,输出连接到驱动器控制端;限位输入信号首先经光耦隔离、总线驱动后,数据传输到数据总线,经地址识别后读入控制器;控制系统软件采用多线程控制方式,通过控制驱动器信号输入端的脉冲数量、频率和方向实现位移促动器的位置、速度和方向控制。
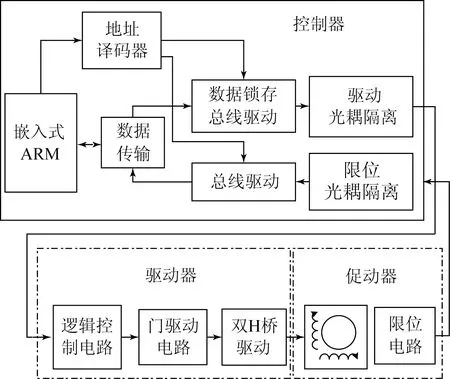
图3 主动反射面控制系统原理图
2.3位移驱动器设计
位移控制器产生速度、脉冲及方向控制信号;位移驱动器将电脉冲信号转化为角位移,每接收到一个脉冲信号,即驱动步进电机按设定的方向转动一个步距角,通过控制脉冲数量来控制角位移量,通过控制方向电信号来控制运动方向;驱动器为电压型功率放大电路,脉冲、方向、细分信号输入到逻辑控制电路产生H桥驱动信号,经门驱动电路放大整形后控制H桥输出。驱动器额定电压为5V,最大电流为1A,可采用整步、2倍、4倍、8倍细分,细分电路可以提高分辨率,但是难以提高控制精度。在精密位置控制中,不适合采用高倍细分,本控制系统采用2倍细分;位移促动器步进电机为200对极两相混合式步进电机,步距角为1.8°,电阻为1Ω,额定电流为2.5A,静转矩为1.1Nm。
2.4主动反射面控制加速度算法
新疆QTT望远镜3mm波段主动反射面控制对速度的要求为0.5mm/s,位移促动器的执行元件为两相混合式步进电机,虽然具有控制简单,体积小,控制精确,位置自锁等优点,但具有启动速度慢、高速失步和低速振动的缺点。位移促动器因为安装位置有限,对尺寸要求严格,采用编码器,进行闭环控制,同时减速箱的设计提高输出转矩的同时,极大的降低了速度,因此,此位移促动器应用于精确位置控制中,需要选择合适的加速度控制算法保证精度和速度技术指标。
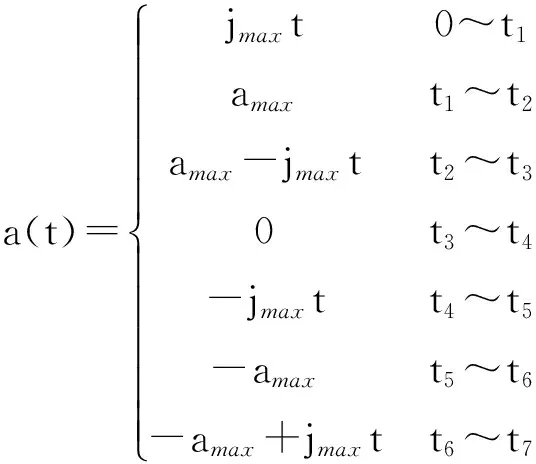
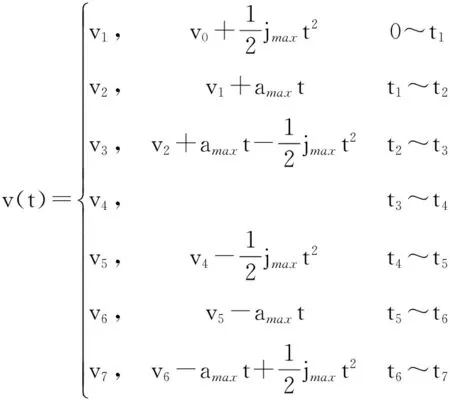
常用的步进电机加速度控制算法有梯形曲线、指数曲线和S曲线[10-11],通过控制加速度来控制位移促动器的运动速度。相比较于前两者,S曲线控制算法加速度没有突变,加速度曲线和速度曲线连续,过渡平缓,保证在运动过程中无突变,启动和停止时冲击比较小,速度平稳,保证位移促动器在启动、停止和平稳性上具有更好的性能,非常适合应用于望远镜中位移促动器的精确控制。位移促动器S曲线控制算法采用七段论,前三段为加速过程,第四段为匀速运动阶段,后三段为减速过程。

(1)
(2)
式中:j(t)为加速度的导数,jmax为位移促动器允许最大加加速度,a(t)为加速度的函数,amax为位移促动器允许最大加速度:

(3)
式中:v(t)为位移促动器速度函数,v0为位移促动器启动速度,v4为位移促动器允许最大速度,也是匀速运动过程的速度,p(t)为位移促动器位置函数。
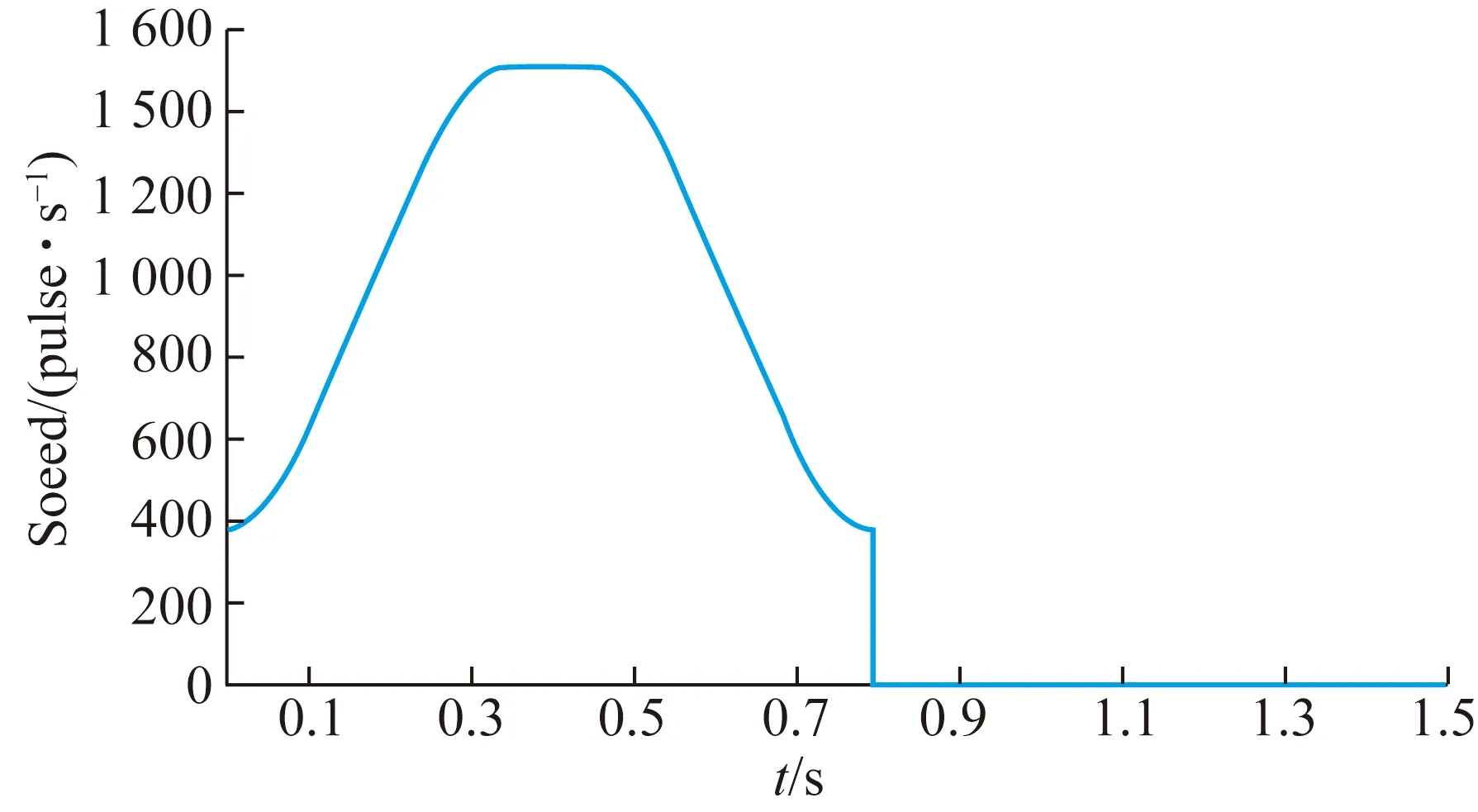
(a)速度曲线
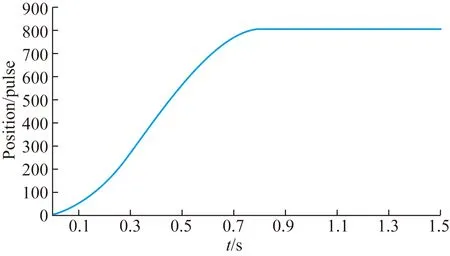
(b)位置曲线
位移促动器采用两相混合式步进电机,其输出力矩随着脉冲频率的上升而下降,如果启动频率太高,则负载能力下降,可能出现严重失步甚至无法启动的现象。根据实际测量结果,选择启动速度v0=375step/s,v4=vmax=1 500step/s,amax=4 500step/s2,加速过程t3=0.35s。采用VC编程仿真,位移促动器S曲线控制速度曲线、位置曲线如图4所示。
将式(2)、(3)位移促动器速度和位置函数离散化为:

(4)
根据启动速度v0和式(4),选择Δt=0.035s,将加速过程分成10个频率段进行离散化,a(k)根据给定条件和式(1)计算,根据式(4)建立位置(脉冲)与速度(频率)的表格,加速控制表如表1所示,在第k段时间内,将以v(k)的速度运行到p(k) 的位置,控制系统对脉冲进行计数,与p(k)比较,如果p(k),则进入第k+1段,查表调整脉冲频率,加速过程在第10段完成,速度达到vmax,然后进入匀速运行过程,在位移促动器即将到位时,减速控制,控制方法与加速控制类似。整个位移控制系统通过对促动器的开环控制即可实现高精度精确控制,其软件流程如图5所示。
位移促动器存在机械空回,当控制器发出反向运行命令时,因为机械间隙的存在,会出现反向运行不到位,且误差较大的情况。针对此问题,对位移促动器采用事先检测标定的措施,即基于位移测试平台,按实际应用要求,对位移促动器施加负载300kg,多次反复测试,经数字滤波后取平均值,计算空回数据,位移促动器每次反向进行误差补偿以提高控制精度。

表1 加速控制表
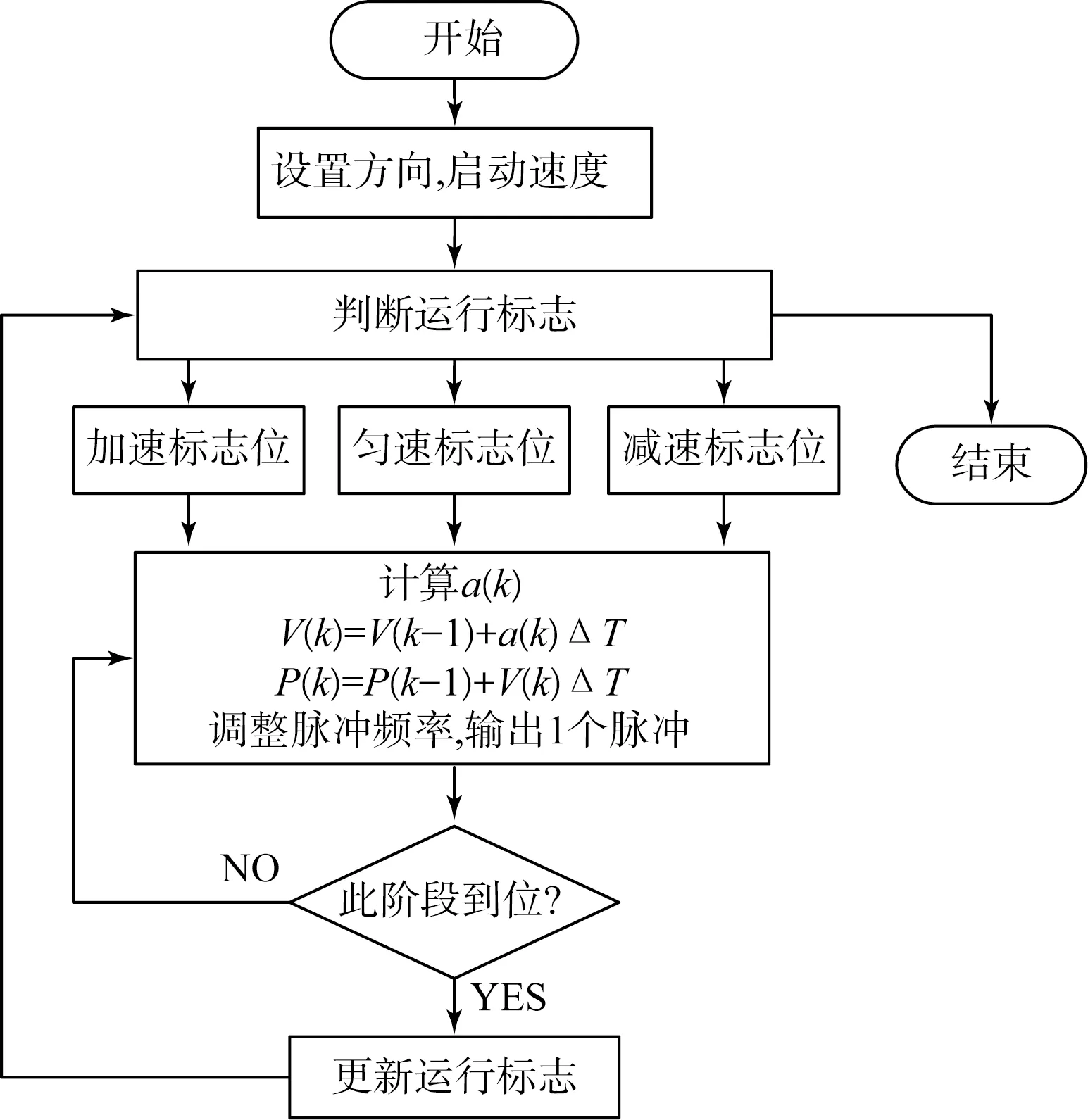
图5 主动反射面控制软件流程图
3 实验研究
3.1主动反射面控制系统实验
基于图3主动反射面控制系统原理研制的实验硬件测试平台如图6所示,采用S曲线加速度算法,在光学隔振平台上,利用高精度双频激光干涉仪ZLM800(位移测量分辨率为1.25nm),在恒温20 ℃、湿度50%±20%的超洁净实验室内,对位移促动器和控制系统进行了测试。
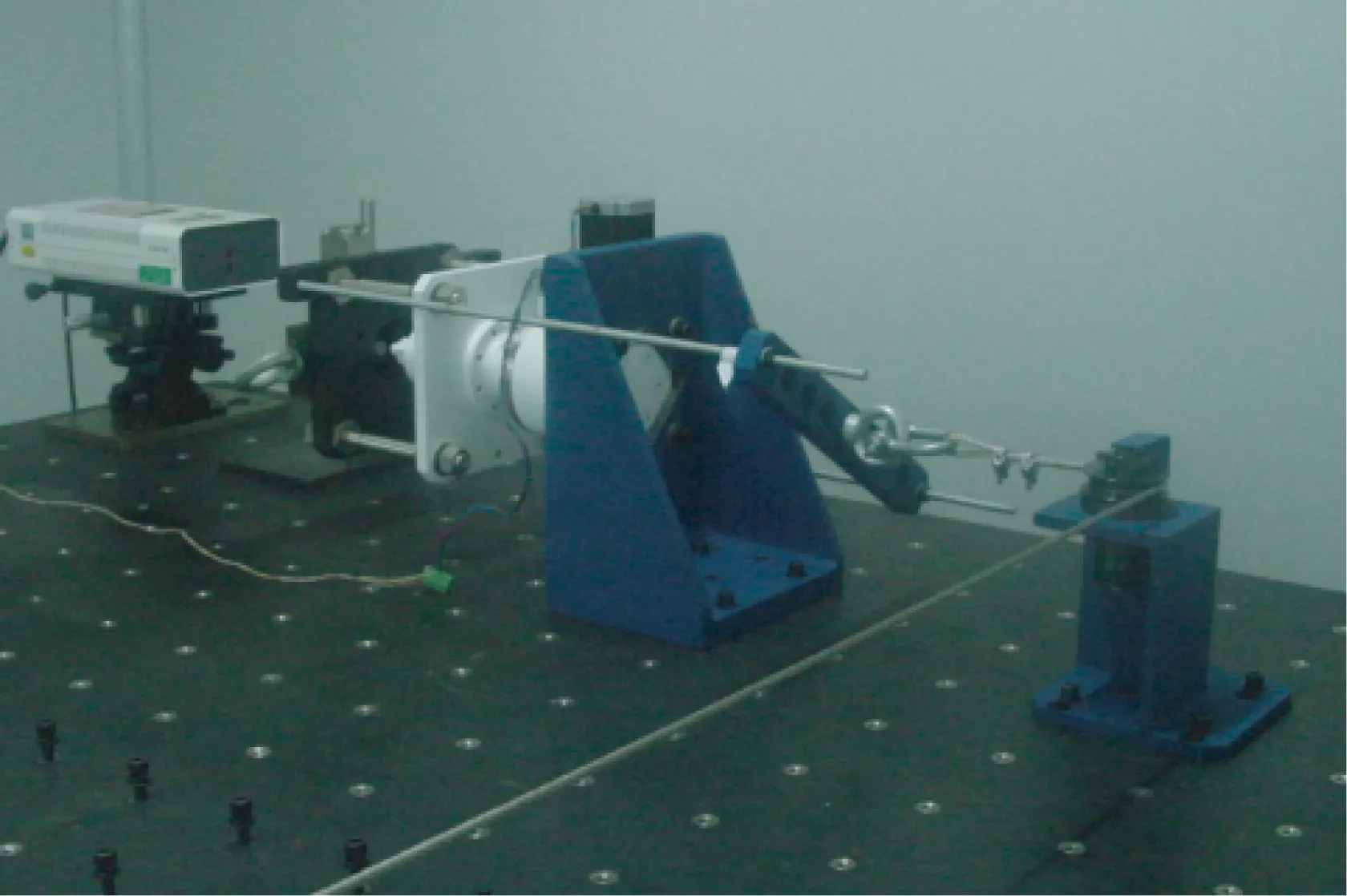
图6 位移测试平台
图7所示为位移促动器加速曲线启动过程,控制系统在0.3s左右完成加速,达到速度0.544mm/s,与图4仿真曲线一致。图8所示为位移控制系统小步长测试曲线,周期5s,运行指令3步,运行次数10次,平均步长为1.086 9μm,标准偏差为0.051μm,分辨率为0.363μm。

图7 控制系统加速曲线
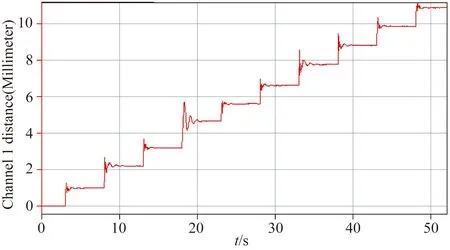
图8 小步长测试


图9 2 mm位移促动器精度曲线及误差分析
分别按照步长2mm的位移量进行测试,测试曲线及误差分析如图9所示,周期为5s,运行15次,行程为30mm,求得步长平均值为2.000 8mm,与理论值偏差为0.04%,标准偏差为3.67μm。
位移控制系统需要有高精度的定位重复性[13],因为反馈系统采用编码器,无法直接测量位移促动器输出位置,只能保证电机运行不丢步,在电机反向运行的时候,因为机械空回的存在,必需进行位移补偿,在实验室内,测出正向转反向空回(P-N)、反向转正向空回(N-P),如图10所示,周期5s,步长1mm,每5次正向运行后,反向运行5次,空回测试曲线及误差分析如图10所示,P-N空回平均值为17.868μm,标准偏差为0.563μm;N-P空回平均值为15.164μm,标准偏差为0.159μm。
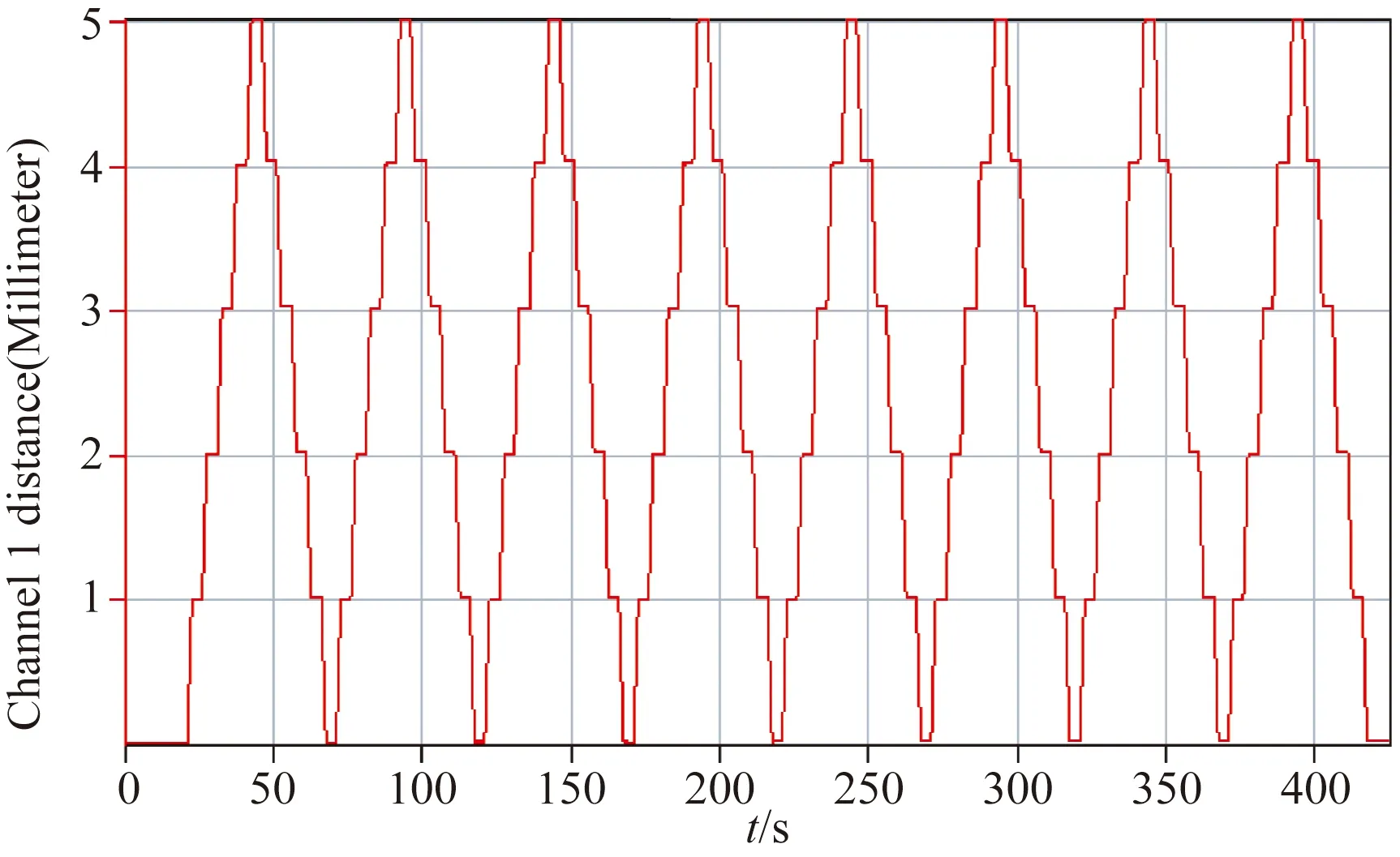
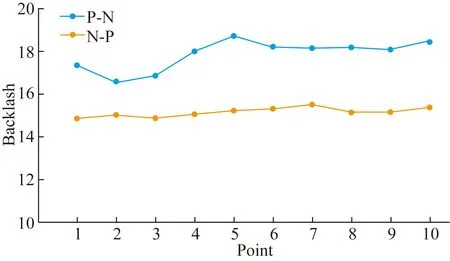
图10 空回实验位移曲线及实验结果
3.2射电望远镜实验室位移控制系统实验验证
基于上述研制的位移促动器和位移控制系统,采用激光位移法[14],在南京天文光学技术研究所毫米波射电望远镜样机系统的4块子面板上进行主动面测试,如图11所示,利用测量精度0.25μm的激光传感器和五套位移促动器,控制四块面板进行了验证检测,结果如图12所示,表明主动反射面控制闭环系统3次迭代后控制精度即可达到5μmRMS,满足3mm波段射电望远镜主动反射面控制的技术要求。

图11 望远镜样机实测
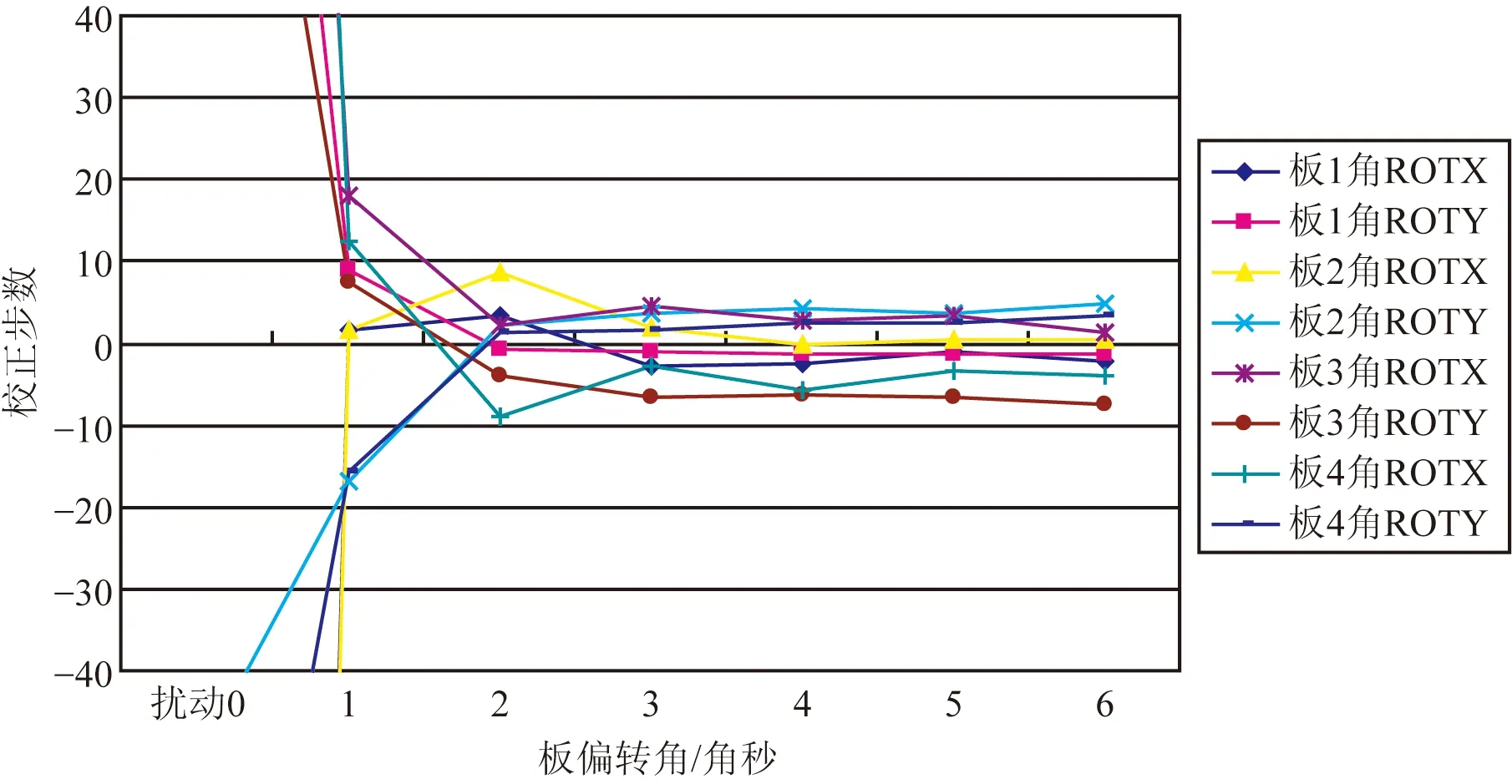
图12 板校正测量偏转角
4 总 结
本文根据毫米波射电望远镜主动反射面控制的技术要求,设计了位移促动器和位移控制系统。位移促动器采用基于涡轮蜗杆加滚珠丝杆的高精度结构设计方案;控制器采用ARM微处理器和S曲线软件算法,基于双频激光干涉仪,在恒温超洁净和光学隔振平台的条件下,进行了系列测试,加速过程在0.3s左右完成,速度达到0.544mm/s,与仿真结果一致;实现了行程为30mm,控制精度优于5μmRMS的高精度、高速精确控制;采用位移补偿的控制方式,在额定负载300kg,给定步长1.095μm(3步)、2mm的测试结果平均值为:1.086 9μm和2.000 8mm,标准偏差为:0.051μm和3.67μm。并在毫米波射电望远镜样机系统采用激光位移传感器进行了实验验证,基于四块子面板进行了闭环检测和实时校正,结果表明主动反射面控制闭环系统多次迭代后控制精度优于5μmRMS,达到QTT射电望远镜3mm波段主动反射面控制的应用要求,也同时远远地优于亚毫米波射电望远镜的技术要求。
[1]JEWELLPR.Thegreenbanktelescope[C]. Proc. of SPIE, 2000,4015:136-147.
[2]TODDRH,FREDERICRS,STEVENDW, et al..Holographicmeasurementandimprovementofthegreenbanktelescopesurface[J]. Publications of the Astronomical Society of the Pacific, 2011, 123(907):1087-1099.
[3]SOUCCARK,WALLACEG,GROSSLEINR, et al..ThearchitectureoftheactivesurfacecontrolsystemoftheLargeMillimeterTelescope[C].Proc. of SPIE, 2014,9151:91512J.1-91512J.6.
[4]沈志强.上海65米射电望远镜[J].科学,2013,65(3):15-20.
SHENZHQ.Shanghai65mradiotelescope[J].Science,2013,65(3):15-20.(inChinese)
[5]ANDREWTS,FRANKWK.FiniteelementanalysesofCCATpreliminarydesign[C].Proc. of SPIE, 2014,9145: 914521.1-914521.17.
[6]GERMNCM.ActivesurfacesegmentationanalysisofCCAT[C]. Proc. of SPIE.2006,6267:62672X.1-62672X.11.
[7]王娜.新疆奇台110 米射电望远镜[J].中国科学,2014,8(44): 783-794.
WANGN.XinjiangQitai110mradiotelescope[J].Science china, 2014,8(44): 783-794.(inChinese)
[8]钱宏亮,柳叶,范峰,等.上海65m射电望远镜非均匀温度场及其效应[J].光学 精密工程,2014,22(4):970-977.
QIANHL,LIUY,FANF, et al..Non-uniformtemperaturefieldandeffectsofShanghai65mRadiotelesxope[J]. Opt. Precision Eng.,2014,22(4):970-977.(inChinese)
[9]弓雷.ARM嵌入式Linux系统开发详解[M].北京:清华大学出版社,2014.
GONGL.ARM embedded Linux system development [M].Beijing:Tsinghuauniversitypress,2014.(inChinese)
[10]黄兆斌,黄云龙,余世明.几种步进电机加减速方法的对比研究及其应用[J].机电工程,2011,28(8):951-953.
HUANGZHB,HUANGYL,YUSHM.Comparativestudybetweenseveralaccelerationanddecelerationmethodsonsteppermotorandapplication[J].Journal of Mechanical & Electrical Engineering,2011,28(8):951-953.(inChinese)
[11]曾康玲,杨向宇,赵世伟,等.步进电机指数型加速曲线优化与实现[J].微电机,2014,6:36-40.
ZENGKL,YANGXY,ZHAOSHW,et al..OptimizationofexponentialaccelerationcurveofsteppermotorandrealizationonPIC[J].Micromotors,2014,6:36-40.(inChinese)
[12]YANGDH,ZHANGY,ZHOUGH, et al.AnactivesurfaceupgradefortheDelingha13.7-mRadioTelescope[C].Proc. of SPIE, 2012,8444: 84444B.1-84444B.10.
[13]许素安,谢敏,孙坚,等.基于压电陶瓷光电相移驱动的大行程纳米定位系统[J].光学 精密工程,2014,22(10):2773-2778.
XUSA,XIEM,SUNJ,et al..Longrangenano-positioningsystembasedonoptoelectronicphase-shiftforpiezoelectricactuator[J].Opt. Precision Eng.,2014,22(10):2773-2778.(inChinese)
[14]ZHANGY,ZHANGJ,YANGDH, et al..Anactivereflectorantennausingalaseranglemetrologysystem[J].Research in Astronomy and Astrophysics, 2012,12(6):713-722.

李爱华(1979-),女,山东夏津人,博士研究生,高级工程师,2002年南京航空航天大学获得学士学位,2005年南京航空航天大学获得硕士学位,主要从事望远镜控制技术方面的研究,E-mail:ahl@niaot.ac.cn

周国华(1965-),男,浙江新昌人,高级工程师,1989年哈尔滨工业大学获学士学位,主要从事望远镜机械设计方面的研究,E-mail:ghzhou@niaot.ac.cn
(版权所有未经许可不得转载)
Control of active reflector system for radio telescope
LI Ai-hua1,2,3*, ZHOU Guo-hua1,2, LI Guo-ping1,2, ZHANG Yong1,2,ZHANG Zhen-chao1,2
(1.National Astronomical Observatories / Nanjing Institute of Astronomical Optics & Technology,Chinese Academy of Sciences, Nanjing 210042, China;2.Key Laboratory of Astronomical Optics & Technology,Nanjing Institute of Astronomical Optics& Technology,Chinese Academy of Sciences, Nanjing 210042, China;3.University of Chinese Academy of Sciences, Beijing 100049, China)
*Corresponding author, E-mail:ahl@niaot.ac.cn
Accordingtothecontrolrequirementsoftheactivereflectorsurfaceinthe110mradiotelescopeatQiTai(QTT)Xinjiang,anewdisplacementactuatorandanewdisplacementcontrolsystemweredesignedandmanufacturedandthentheircharacteristicsweretestedbyadual-frequencylaserinterferometerinthemicro-displacementlaboratory.Thedisplacementactuatorwasdesignedbyaschemeofhighprecisionwormandrollerscrewstructures,andthedisplacementcontrolsystemwasbasedonaARMmicro-processor.Finally,theScurveaccelerationcontrolmethodswereusedtodesignthehardwareplatformandsoftwarealgorithmfortheactivereflectionsurfaceofthecontrolsystem.Thetestexperimentswereperformedbasedonthelasermetrologysystemonanactivereflectorclose-loopantennaprototypeforlargeradiotelescope.Experimentalresultsindicatethatitachievesa30mmworkingstrokeand5μmRMSmotionresolution.Theaccuracy(standarddeviation)is3.67μm,andtheerrorbetweenthedeterminedandtheoreticalvaluesis0.04%whentheratedloadis300kg,thestepis2mmandthestrokeis30mm.Furthermore,theactivereflectorintegratedsystemwastestedbythelasersensorswiththeaccuracyof0.25μmRMSon4-panelradiotelescopeprototype,themeasurementresultsshowthattheintegratedprecisionoftheactivereflectorclosed-loopcontrolsystemislessthan5μmRMS,andwellsatisfiesthetechnicalrequirementsofactivereflectorcontrolsystemoftheQTTradiotelescopein3mmwavelength.
radiotelescope;activereflector; Scurveaccelerationcontrolalgorithm;displacementactuator;displacementcontrolsystem
2016-01-10;
2016-02-15.
国家自然科学基金资助项目(No.U1331204);国家重点基础研究发展计划(No.2015CB857100)
1004-924X(2016)07-1711-08
TH751
Adoi:10.3788/OPE.20162407.1711
猜你喜欢
军事文摘(2022年12期)2022-07-13
儿童故事画报·自然探秘(2022年6期)2022-07-05
中国测试(2022年5期)2022-06-10
军事文摘(2021年22期)2022-01-18
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
太空探索(2016年9期)2016-07-12
纺织导报(2014年9期)2014-10-31
