应用局部自适应阈值方法检测圆形标志点
2016-03-31 06:03谢超谢明红
华侨大学学报(自然科学版) 2016年2期
谢超, 谢明红
(华侨大学 机电及自动化学院, 福建 厦门 361021)
应用局部自适应阈值方法检测圆形标志点
谢超, 谢明红
(华侨大学 机电及自动化学院, 福建 厦门 361021)
摘要:利用圆形标志点的几何和灰度特征,在图像中搜索具有符合该特征描述的区域,对圆形标志点进行粗定位.对粗定位区域的扩展区域使用最大类间方差阈值分割法分割出圆形标志点轮廓,并对像素轮廓进行最小二乘拟合,计算出圆形标志点的中心坐标及拟合轮廓各参数,根据该参数筛选保留所需标志点中心坐标.结果表明:该方法使用局部的大津阈值检测圆形标志点,能够避免全局阈值的缺陷,提高标志点检测的检出率;采用最小二乘椭圆拟合提取标志点中心,能够达到亚像素级精度.
关键词:图像分割; 机器视觉; 自适应阈值; 圆形标志点; 椭圆拟合
目前在机器视觉领域,常常使用圆形标志点作为标识提取图像信息,如利用圆形标志点对立体视觉系统进行精确标定[1];通过提取圆形标志点位置信息定位结构光测量系统,实现测量点云数据间的配准[2-5]等.因此,从图像中准确且完整地检测出圆形标志点是一个关键问题.检测圆形标志点首先要经过图像分割环节,通过图像中的灰度信息提取出感兴趣的目标区域,即圆形标志点.本文根据圆形标志点的几何及灰度特征,确定其在图像中的大致位置,取以该位置为中心的矩形范围内的灰度值,利用最大类间方差法分割提取出圆形标志点.
1圆形标志点粗定位
广泛使用的图像分割方法有灰度直方图法、迭代法、最大熵阈值法、最大类间方差法等,然而这些方法大多属于全局阈值.当图像受到光照干扰造成图像中不同位置的灰度值不在同一等级时,全局阈值分割图像容易错误分割特征.受光照干扰图像,如图1所示.局部自适应阈值检测圆形标志点需要在局部范围内粗略确定圆形标志点的位置,在该位置附近区域使用最大类间方差法自动计算阈值进行图像分割,其流程如图2所示.
矩形窗口可根据需要设置大小,如图3所示.图3中:W为长;H为宽;单位为像素;矩形窗口中的灰度值是指在原图像中取出W×H范围内的像素值.
在原图像中滑动矩形窗口,每次横向移动W个像素,到一行的末尾将矩形窗口移到该行起始位置,并纵向移动H个像素,再继续横向移动,直到遍历完整张图像.自定义像素信息结构体为
struct PixelInfo{
int i;∥行像素
int j;∥列像素
int v;∥像素值
}
实例1一个PixelInfo类型的vector对象,将窗口中的像素信息存入vector容器中,计算最大像素值,并返回其对应像素的行坐标i和列坐标j.

图1 受光照干扰图像 图2 圆形标志点粗定位流程图 Fig.1 Light interference image Fig.2 Circular mark points coarse positioning flowchart
圆形标志点的形状和灰度特征,如图4所示.典型的圆形标志点由外圈的黑色圆环和中心白色圆组成,在黑色圆环和白色圆的交界处存在明显的灰度梯度.利用圆形标志点的这个特点,使用十字型窗口探寻4个方向的灰度跳跃特征,以此粗定位圆形标志点.十字型窗口可根据需要设置大小,如图5所示.

图3 矩形窗口 图4 圆形标志点 图5 十字型窗口 Fig.3 Rectangular window Fig.4 Circular mark point Fig.5 Cross-shaped window
根据圆形标志点在实际图像中的尺度,设置十字型窗口4个方向的长度.将矩形窗口返回的像素灰度极值点P(i,j)设为十字型窗口的中心点.从中心点出发,朝4个方向以此取出像素灰度值Grayi,灰度梯度定义为

(1)
K为设定的灰度梯度阈值,当|ki|≥K时,认为搜索到圆形标志点中心白色圆与黑色圆环的边界,或者是黑色圆环最外圈边界.在十字型窗口的上、下、左、右4个方向上进行搜索,当出现两次明显的灰度变化,记录此时的i;若在4个方向上都有两次灰度跳跃的特征,认为已完成圆形标志点的粗定位.
2圆形标志点的提取
2.1最大类间方差的阈值分割

(a) 全局阈值分割 (b) 局部阈值分割图6 全局阈值和局部阈值分割对比图Fig.6 Segmentation comparison of globalthreshold and local threshold
1979年,Otsu[6]提出最大类间方差法即大津法,基本思想是在某一灰度值处,将图像分割成两组类间最大方差,该灰度值作为最佳阈值.在图像中对圆形标志点进行粗定位,可得到圆形标志点4个方向上的边界,在此边界的基础上继续向外延伸若干像素,可得到包含圆形标志点的一块局部区域,对该区域使用大津法分割图像.图1进行阈值分割的效果,如图6所示.
由图6可知:由于局部光照的影响,采用全局的大津阈值法分割图像,导致圆形标志点不完整甚至完全缺失,而经过粗定位,再进行局部阈值分割,能够比较完整地保留圆形标志点.
2.2连通区域的筛选
像素间的连通性是确定区域的一个重要概念[7-9].将所有具有连通性的像素作为一个区域则构成了一个连通区域.图6(b)中:每个被分离的白色区域将作为一个连通区域,控制连通区域的大小就可筛选出所需的圆形标志点,并且舍去一些由于贴标角度或者拍摄角度造成的变形较大或较模糊的标志点.经过连通区域筛选,并采用Canny算子提取边缘后的效果,如图7所示.
2.3最小二乘的椭圆拟合
在图像二维坐标系中,椭圆一般有2种表示形式,一种是由圆锥曲线方程表示,即
(2)
另一种是平面坐标系的几何参数表示,如图8所示,即椭圆中心为(xc,yc).图8中:a为长轴;b为短轴;θ为长轴转角.

图7 连通区域筛选 图8 椭圆平面几何参数表示 Fig.7 Connected region screening Fig.8 Ellipse plane geometric parameters
两种表示形式的参数转换为
(3)
(4)
(5)
利用最小二乘原理,对椭圆边缘的离散点进行最小二乘处理[10-11],即求目标函数

的最小值,由极值原理,要求f(A,B,C,D,E)的最小值,有
由此可得参数A,B,C,D,E,F的值.
2.4拟合椭圆筛选
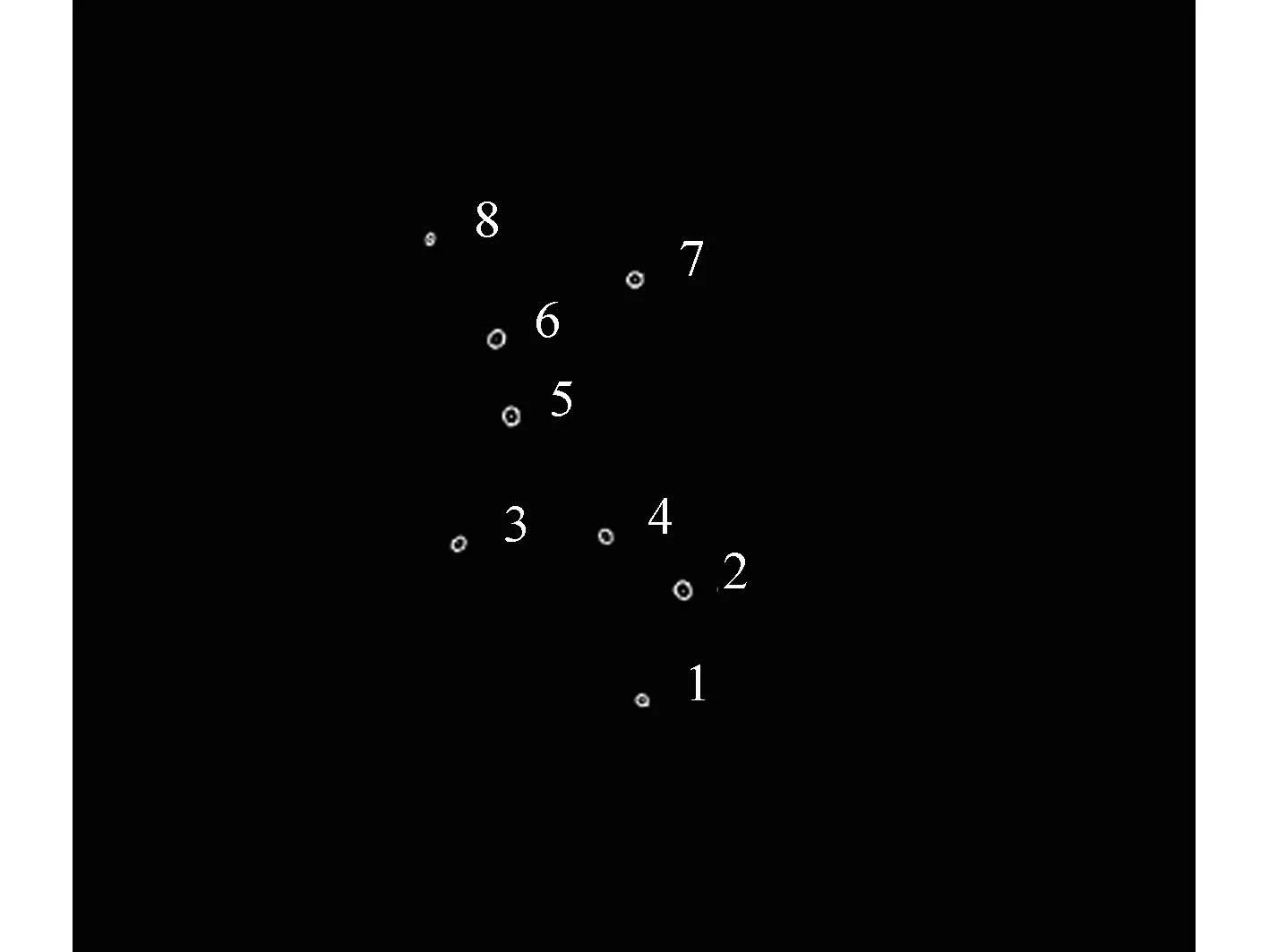
图9 拟合椭圆筛选Fig.9 Fitted ellipse screening
经过连通区域筛选过后,可能还留下非圆形标志点的轮廓或是轮廓较小的标志点(图7),这对椭圆拟合提取中心点及后续的立体匹配精度都将造成影响.因此,可以通过拟合出的椭圆参数进行拟合椭圆筛选.
由最小二乘椭圆拟合算法可以得出拟合椭圆的长轴a,短轴b和长轴转角θ.通过长轴a和短轴b的比例关系筛选拟合椭圆,保留比例关系的轮廓为
(6)
适当调整比例关系,满足拟合椭圆筛选条件.通过拟合椭圆的筛选,剔除变形较大的标志点轮廓和杂质轮廓.经过拟合椭圆筛选后的结果,如图9所示.
各拟合椭圆中心坐标点,如表1所示.

表1 拟合椭圆中心坐标
3实验结果及分析
实验采用1台明基MP515投影仪、1个维视MV-1303UM工业摄像头和1台PC机.在VC++程序中定义圆形标志点检测类,即
class CCircleMarkDetection{
public:
IplImage×image ∥图像对象
int width; ∥图像宽
int height; ∥图像高
CPoint MaxValuePosition(vectorPixelInfopixelstore); ∥计算最大像素值位置
void MarkPointDetection(IplImage *image, vectorPixelInfom_pi); ∥标志点中心提取
void ManageMarkImage(IplImage *image, int a, int b); ∥连通体标记
int CalculateThreshold(IplImage *image); ∥计算大津阈值
};
基于局部自适应阈值的圆形标志点检测方法如下,即
1) 在石膏模型上贴若干圆形标志点.
2) 打开投影仪,向石膏模型投影白光,打开摄像机拍摄图像,并保存.
3) 读取使用白光投影的图像,提取标志点中心,设置N×N的窗口,初始化循环变量i=(N+1)/2,j=(N+1)/2,遍历整张图像,循环变量的步距为(N+1)/2.定义一个vectorPixelInfo类型的容器对象pixelstore,在每次循环中取出窗口各个位置对应的像素坐标和像素值,存入容器pixelstore中,调用函数MaxValuePosition()计算窗口中最大像素值对应的像素坐标.以该像素点P(Im,Jm)为中心向上、下、左、右4个方向发散,根据式(1)计算灰度梯度.若在4个方向上的有限个像素内,都满足有一个点的灰度梯度|k|≥K,K为灰度梯度阈值,那么认为该局部范围存在圆形标志点.调用函数CalculateThreshold()计算该范围内的大津阈值,并分割图像.
4) 调用函数ManageMarkImage()对分割后的图像进行连通体标记,去掉不符合要求的轮廓,并采用函数MarkPointDetection()拟合各个轮廓,并根据式(6)筛选出符合要求的椭圆轮廓.

图10 石膏模型及处理结果Fig.10 Plaster model and results
采用以上方法拍摄贴有圆形标志点的石膏模型,处理的结果,如图10所示.实验得出有效圆形标志点的检出率,如表2所示.表2中:n为贴标个数;η为提高的检出率.

表2 全局阈值与局部阈值检测标志点有效率对比
由表2可知:采用局部阈值方法检测圆形标志点能够有效地提高圆形标志点检出率.
4结束语
提出一种基于局部自适应阈值的圆形标志点检测方法,该方法能够有效地避免全局阈值在局部反光图像中检测圆形标志点的缺陷.验证结果表明:该方法有效地提高了圆形标志点的检出率.在粗定位圆形标志点区域环节存在重复搜索现象,这是下一步努力完善的方向.
参考文献:
[1]吴凡路,刘建军,任鑫,等.基于圆形标志点的深空探测全景相机标定方法[J].光学学报,2013,33(11):139-145.
[2]LIU Jianwei,LIANG Jin,XIAO Zhenzhong,et al.Development of a large-scale 3D digitizing system for cultural heritage documentation[C]∥IEEE Proceedings of the International Conference on Mechatronics and Automation.New Jersey:IEEE Press,2010:1587-1592.
[3]欧阳祥波,宗志坚,熊会元.基于标志点的测量数据自动拼接方法[J].中国图象图形学报,2008,13(2):298-301.
[4]梁云波,邓文怡,娄小平,等.基于标志点多视三维数据自动拼接方法[J].北京信息科技大学学报(自然科学版),2010,25(1):30-33.
[5]王赫.视觉测量点云数据拼接方法及关键技术研究[D].哈尔滨:哈尔滨理工大学,2011:3.
[6]OTSU N.A threshold selection method from gray-level histogram[J].IEEE Trans,1979,9(1):62-66.
[7]甘玲,林小晶.基于连通域提取的车牌字符分割算法[J].计算机仿真,2011,28(4):336-339.
[8]陈柏生.一种二值图像连通区域标记的新方法[J].计算机工程与应用,2006,42(25):46-47.
[9]刘贤喜,李邦明,苏庆堂,等.一种新的二值图像连通区域准确标记算法[J].计算机工程与应用,2007,43(22):76-78.
[10]闫蓓,王斌,李媛.基于最小二乘法的椭圆拟合改进算法[J].北京航空航天大学学报(自然科学版),2008,34(3):295-298.
[11]安新源,周宗潭,胡德文.椭圆拟合的非线性最小二乘方法[J].计算机工程与应用,2009,45(18):188-190.
(责任编辑: 陈志贤英文审校: 杨建红)
Circular Mark Point Detecting Research Based on Local Adaptive Threshold
XIE Chao, XIE Minghong
(College of Mechanical Engineering and Automation, Huaqiao University, Xiamen 361021, China)
Abstract:Using the geometric and gray features of the circular mark points, search an area in the image with the feature description and do coarse position of them. The extension area of coarse position area is divided into the contour of the circular mark points using Otsu threshold segmentation method, and the the contour pixels are fitted with the least squares method to calculate the center coordinates of the circular mark points as well as the parameters of the fitting contour. According to the parameters to select the center coordinates which is needed. The results show that this method takes advantage of local Otsu threshold to detect circular mark points and avoids the defect of global threshold, improves the detection efficiency of circular mark points. Using the least squares ellipse fitting to extract mark points center can achieve sub-pixel precision.
Keywords:image segmentation; machine vision; adaptive threshold; cular mark point; ellipse fitting
中图分类号:TP 317.4
文献标志码:A
基金项目:福建省科技重大专项(2013HZ0001-2)
通信作者:谢明红(1968-),男,研究员,博士,主要从事数控技术的研究.E-mail:xmh@hqu.edu.cn.
收稿日期:2014-12-24
doi:10.11830/ISSN.1000-5013.2016.02.0134
文章编号:1000-5013(2016)02-0134-05
猜你喜欢
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
电脑知识与技术(2016年24期)2016-11-14
电脑知识与技术(2016年24期)2016-11-14
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
企业导报(2016年10期)2016-06-04