
应用于红外搜索跟踪和态势感知系统的全景成像技术
2016-03-15 06:49:37张若岚
红外技术 2016年4期
陈 洁,张若岚
应用于红外搜索跟踪和态势感知系统的全景成像技术
陈 洁1,2,张若岚1,2
(1. 昆明物理研究所,云南 昆明 650223;2. 于起峰院士工作站,云南 昆明 650223)
本文指出红外全景成像技术应用于搜索跟踪和态势感知系统的优势,提出了该类系统的几种主要全景成像方案,对各方案逐一介绍,列举典型应用实例说明,进行技术分析,对比了几种主要的全景成像方案的特点和应用领域,概括了全景成像系统的支撑关键技术,并展望发展趋势。
全景成像;红外搜索跟踪系统(IRST);态势感知;图像拼接;步进凝视
0 引言
全景成像(Panoramic Imaging,PI)采用特殊的成像装置获得水平或者垂直方向上的大于180°的半球视场或者360°的视场,被广泛应用于红外搜索跟踪和态势感知系统[1]。
红外搜索跟踪系统(IRST)通过探测目标的红外辐射来实现在广域空间内对目标进行搜索与跟踪,利用红外被动探测、便于隐身和探测概率高的优势,在强电子对抗的条件下,对无人机、隐身飞机、巡航弹、弹道导弹等各种军事目标有较强探测、识别能力。红外搜索跟踪系统早期主要用于对空的点目标探测,现在类似的光电系统也被广泛用于对周边态势的全景感知,即关注的是面目标和全景成像。近年来,随着对有关目标、背景特性认知程度的增加,以及光电传感器、电子电路和软件技术的快速发展和有关算法的改进,各种产品呈现出良好的发展前景[2]。
在分析总结红外搜索跟踪系统发展的基础上,笔者归纳总结出该类系统全景成像技术方案如图1所示,由图1可见,红外搜索跟踪系统首先可根据其所选用的红外探测器类型分为基于线列和凝视器件两种,其中基于凝视型器件的系统可再细分为不同技术路线的产品,分别为:连续慢速扫描类、步进凝视扫描类、反向扫描补偿类、分布式孔径类、全景光学镜头成像类以及数字TDI等多种类型系统,从发展历史和当前产品分布看,红外搜索跟踪系统的关键技术发展可概述为从最初唯一的技术途径只能采用线阵列器件进行扫描周视探测发展到如今可根据具体情况(比如指标要求、应用特点、成本等)在以上提到的多种技术途径中灵活选择最适合的技术方案来实现广域搜索跟踪或全景态势感知等功能,以下做详细阐述。
1 按器件类型分
红外搜索跟踪系统第一个核心点在“红外器件”选型,采用何种器件又反过来决定了系统的基本性能和全景成像方式。这里有几个问题须得首先考虑:一是波段选择,二是扫描或者凝视?三是制冷还是非制冷?等等,这些选项必须综合权衡。
红外探测波段的选择需要综合考虑探测器、目标辐射、背景辐射、大气衰减、材料和成本等多种因素。
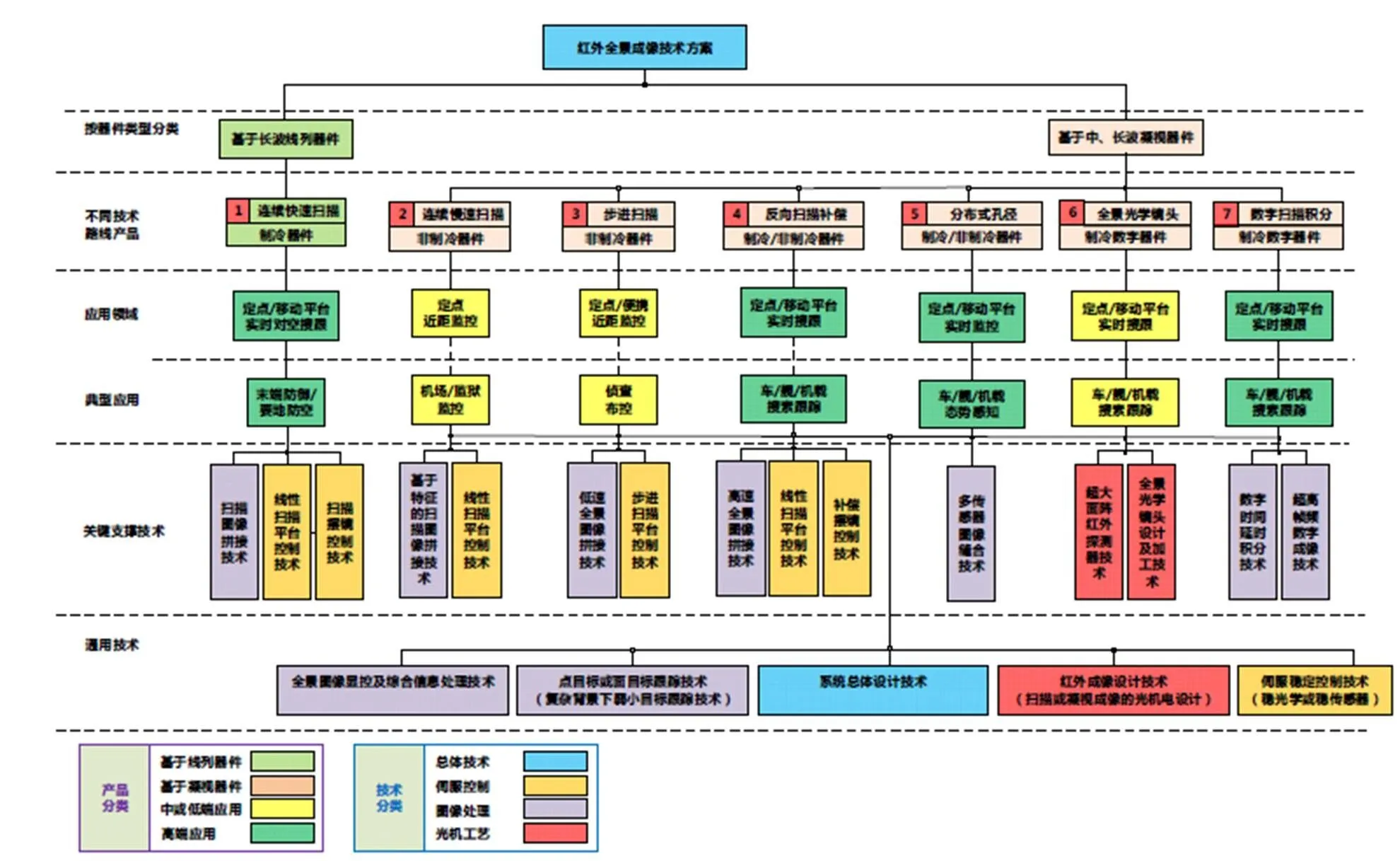
图1 红外全景成像技术方案
某些情况下,各个因素对波段选择的影响并不一致。这就更要求对各个因素进行综合分析,以做出最合适的选择。探测某些目标时选用两个波段各有利弊,可能都是合理的。在某些应用场合,中波探测比长波探测距离更远—些,而在另一些场合,长波探测比中波探测距离更远一些。这时就要再考虑其他方面的因素,如探测器的订货来源、系统的成本、光学材料的选择和系统的复杂性要求等因素,以做出合理决策。
对一些常见的被测目标,可以参照以下方式选择合适的探测波段:
1)对于近距应用,如普通红外安防监控系统、手持红外望远镜和头盔式热像仪等,探测距离多在几十米到2km之间,应优先采用非制冷长波探测。
2)对于湿度较高的应用,如舰载光电系统,由于这种环境下中波辐射的大气透过率比长波的高很多,中波探测器的灵敏度也较高,因此,应优先选用中波红外波段。但对于对抗掠海飞行的来袭导弹,由于水面波动会形成很多小镜面,中波产生的镜面反射远高于长波,会对点目标跟踪带来很大的影响,因此此类应用还要考虑用长波,除非能有效滤除镜面干扰。
3)对于空地、空空和地空远距离应用,如果探测温度在300K以下的低温目标,由于此时目标的长波辐射比较明显,且传输路径中水汽较少,透过率较高,应优先采用长波探测系统。如果探测中高温目标,如飞机热喷管、排气管、尾焰等,此时目标的中波辐射明显,应优先采用中波探测系统。如果红外系统自身在高速运动,如导弹探测系统、机载光电侦察系统等,由于其窗口玻璃要承受很大的风压和气动加热,目前没有合适的长波光学材料,因此也应该采用中波探测系统。
4)对于地面远距离应用,背景辐射大多比较复杂,大气传输路径较长。如果环境湿度较高,一般应考虑采用中波探测。如果环境湿度较低,可以考虑采用长波探测,但需要综合分析目标辐射、背景辐射等因素。
5)对于某些红外系统,可以同时选用两个波段甚至多波段进行探测,通过融合分析多波段红外图像,更有利于识别目标,也会使系统具有更好的抗干扰能力[3]。
回望IRST的发展历史,囿于器件发展水平,早期产品以采用长波制冷线列探测器为主,该类系统性能受限于积分时间和全景帧更新频率;随着技术发展,凝视型红外焦平面探测器批量应用以来,国内外相关企业都围绕基于该类型器件的红外搜索跟踪系统展开研究。相比线列探测器十几μs的积分时间,凝视器件的积分时间可长达几个ms量级,从而使投射到探测器上的能量大幅增加,提高了图像的信噪比和系统作用距离,因而基于凝视器件的红外搜索跟踪系统越来越受到各国重视。凝视型探测器逐渐在扩大应用中,非制冷器件在该领域也逐渐有了用武之地。
长波凝视焦平面探测器仍是碲镉汞器件性能最佳[4],但碲镉汞材料制造大规模阵列的技术难度较大,工艺复杂,成本极高。近年,同样应用于长波的量子阱器件有较大突破,具有价格低的巨大优势,能有效降低系统成本,在低成本方案中可以考虑应用。
2 几种主要的全景成像技术方案介绍
由于早些时候凝视型红外焦平面探测器还不成熟,红外搜索跟踪系统基本都是基于线列探测器进行设计,因此无论国外还是国内基本都是采用线扫描方案进行构型的,具体见2.1节描述;凝视器件发展起来后,则有了更多基于凝视焦平面器件的应用,详见2.2~2.7节。
2.1 线扫描方案
图1中第1种系统为线扫描方式,该类方式是用得最早的一种红外搜索跟踪系统方式,系统采用制冷型长波线列红外探测器(如288×4),系统工作在全景模式时,通过转台方位向的连续旋转将周围景物的红外辐射顺序投射到探测器上以实现全景成像,如图2[5]所示。当系统工作在前视红外(FLIR)模式时,扫描转台转变为云台工作模式,红外成像系统工作在热像仪的状态,通过内部一个快速摆镜来完成在视场内的横向空间解析[6]。
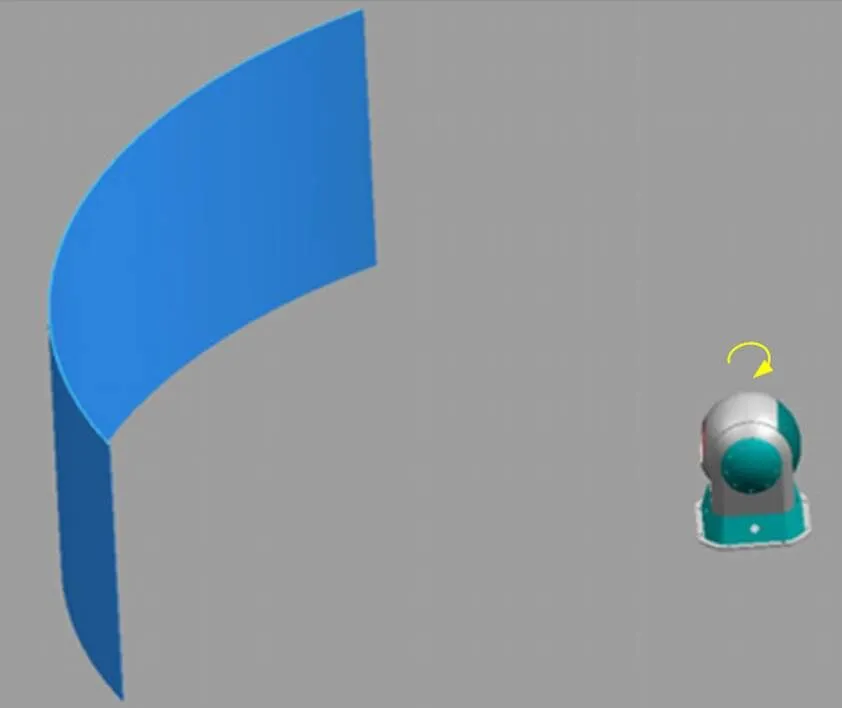
图2 线扫描红外搜索跟踪系统示意图
该类系统主要应用于定点布放或者移动平台实时对空搜跟等,近年来随着凝视系统的应用日益广泛,更多地用于末端防御和要地防空等场合。
国外典型例子是Thales UK公司为英国陆军研制的ADAD“防空告警装置”(Air Defense Alerting Device),如图3[7]所示,其核心器件为制冷长波线列型碲镉汞红外探测器。ADAD最先研制是基于陆军应用,后来根据实际需要研制了各种改进型,应用领域扩张到海军(ARISE“区域可重构红外扫描设备”Area Reconfigurable Infrared Scanner Equipment)和空军(PIRATE)。
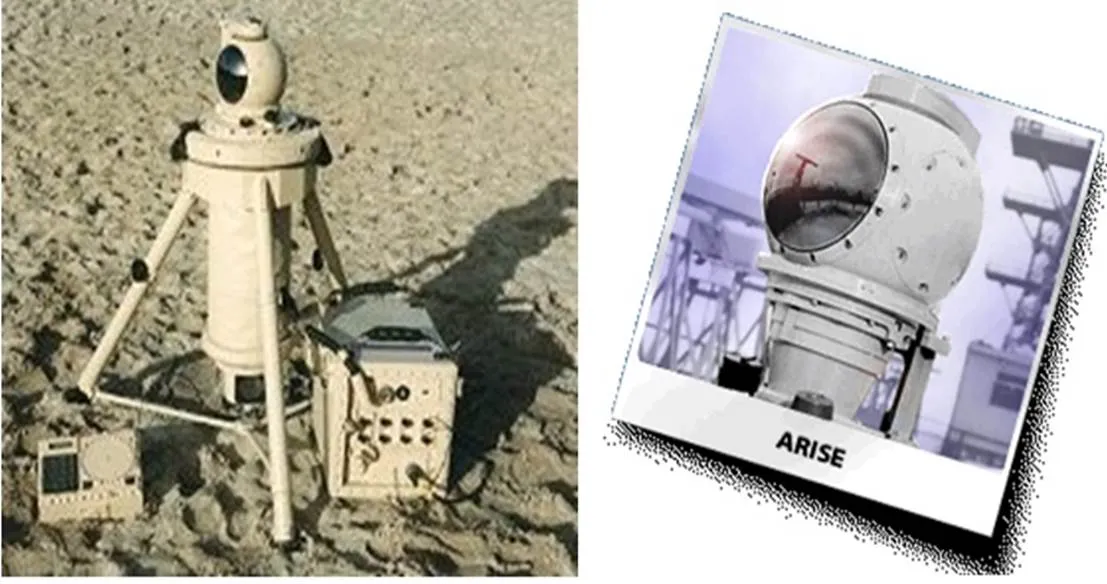
图3 ADAD(左)和ARISE(右)红外搜索跟踪系统
2.2 凝视器件慢速扫描方案
为了获得360°的全景图像,需要一个无限大的像平面,物理上很难实现。随着计算机技术和数字图像传感器的发展,对数字相机绕其光轴旋转所拍得的序列图像进行无缝拼接,既可以获得人工合成的全景图像,也可以采取围绕一个固定点安装多个摄像机,使得摄像机的全部视场加起来形成全景视场,由于凝视器件在进行快速扫描时会造成图像拖尾,如果不增加补偿环节,只能选用慢速扫描方式,即控制扫描平台转速在一定范围,以达到凝视器件的每个积分时间内存在的图像拖尾在可接受域,通过一个个的凝视视场拼接来完成全景成像,图4[8]所示为这种系统的基本构型。

该类系统由于只能在转台低速转动时进行探测器积分,使得积分时间也受限制,因此只能用于低端或轻小型应用,多用于民用近距离定点监控,布放在机场、监狱或其他敏感区域等。
2.3 步进凝视扫描方式
这是慢速扫描模式的升级改善版,为了弥补凝视器件在进行连续扫描时造成图像拖尾,使得系统传递函数降低,全景扫描速度受限这一缺陷,可以采用基于步进凝视的扫描方式,即在保持方位向全景扫描的同时尽量保证在凝视器件的每个积分时间内场景相对固定,通过一个个的凝视视场拼接来完成全景成像,如图5[5]所示。

图5 步进凝视红外搜索跟踪系统示意图
为实现步进凝视,在具体系统设计上也有2种选择,一种是采用扫描平台直接在扫描方向上进行步进控制,即在360°范围内不停地快启快停,在每一个停止时刻进行凝视采样,从而实现步进扫描的目的。由于在工程实现上想彻底做到快速停止再快速启动不太可能,因此通常考虑采用不等速运动,如图6[5]所示,系统在图像采集的瞬间使扫描运动平台低速运行,完成积分图像采集后,运动平台迅速加速,在到达下一个图像采集位置前即开始减速,速度降低后开始下一幅图像的采集,如此周期步进即可得到全景图像,成像质量可接近于凝视成像。
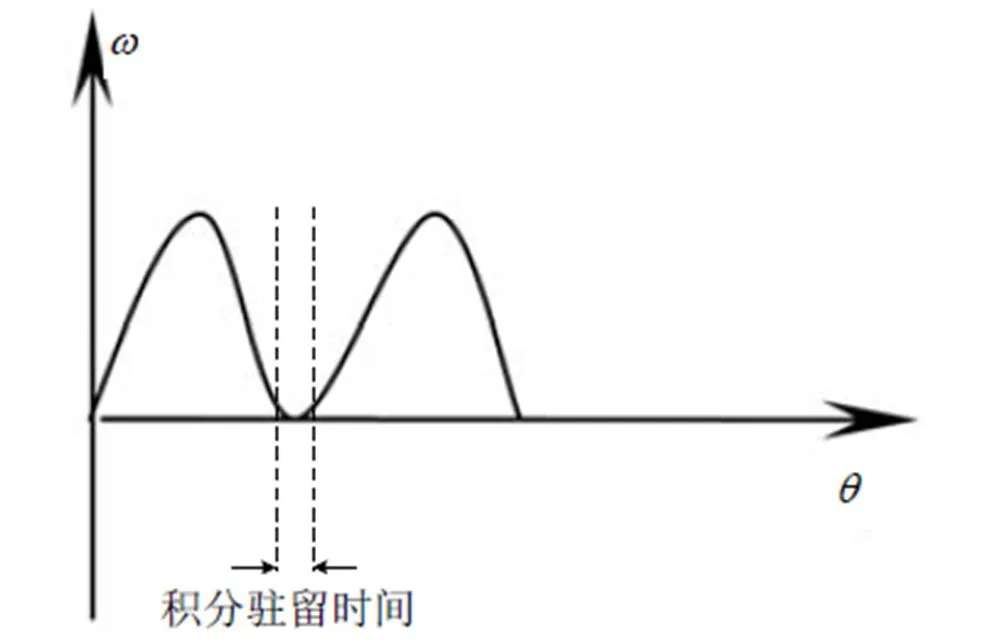
图6 变速扫描示意图
由于该方式是对整个传感头进行变速控制,因此传感头的转动惯量不能太大,全景帧频也很难提高,且和慢速连续扫描的方案一样只能在转台低速转动时进行探测器积分,使得积分时间也受限制,同样只能用于低端或轻小型应用。
昆明物理研究所正在研发中的“慧眼”(iEye)便携式小型全景成像态势感知系统正是该类系统的应用实例,图7所示为系统传感头,集成了非制冷长波热像、低照度CMOS成像传感器,系统看上去像一个普通的小光电转塔,但实际上是通过高速启停的步进扫描来实现全景成像或动态局域图像。

图7 昆明物理研究所研发中的iEye产品
2.4 反向扫描补偿方式
另一种步进凝视方式是采用带补偿镜的方式实现步进全景成像,其主要原理是在光路中加入一块相对于扫描平台进行反向扫描的补偿反射镜,通过反射镜的反向扫描来补偿扫描平台的转动,当扫描平台转过一个凝视视场时,补偿镜再快速回到初始位置,以进行下一个凝视视场的补偿,如图8所示。如此周期步进即可得到全景图像,成像质量可接近于凝视成像。
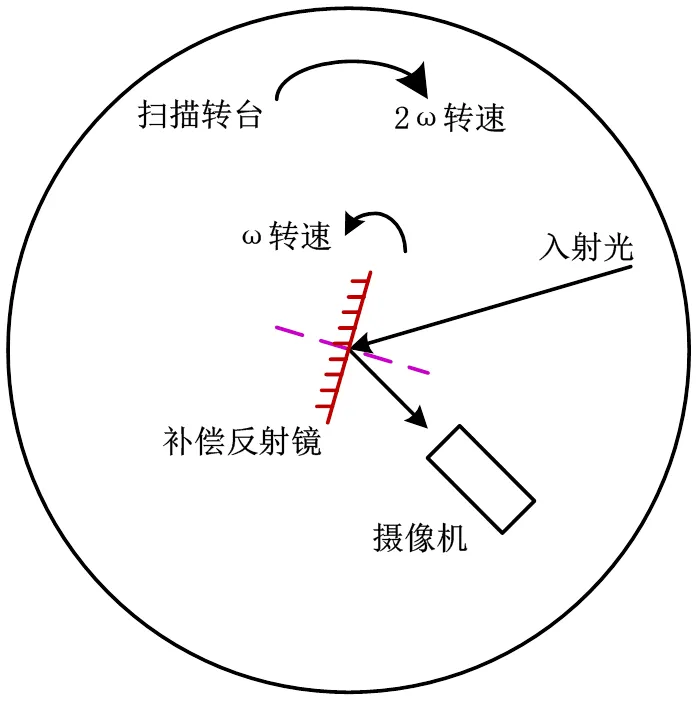
图8 补偿扫描示意图
由于该方式只需要控制反射镜进行快速摆动,因此比变速扫描方式的控制对象要轻小许多,可以实现快速全景扫描,且由于在反射镜进行差动补偿期间大部分时间都可以用于积分,因此可以获得更好的能量累积,该方式也是目前国内外基于凝视器件的中高端全景成像系统的首选方式。
一个典型例子是法国Sagem公司研制的新一代海军红外搜索跟踪系统EOMS NG,如图9[9]所示。该系统为原“旺皮尔(VAMPIR)”MB系统的升级产品。其中,系统的红外图像由一台中波焦平面红外热像仪通过快速步进机构进行周视扫描来提供,图像采集速率高达100Hz,整个系统预警距离是原MB系列产品的1.5倍。

图9 EOMS NG红外搜索跟踪系统
同为法国Sagem公司研制的DS全景成像传感器是另一个典型应用实例,已投入舰载实用的系统实物照片如图10[9]所示。

图10 Sagem DS全景成像传感器
图11[9]给出了该系统的光学示意图。由图中可见,该系统采用一个被称作Training scanner的机构进行图像校正补偿,实现全景成像。
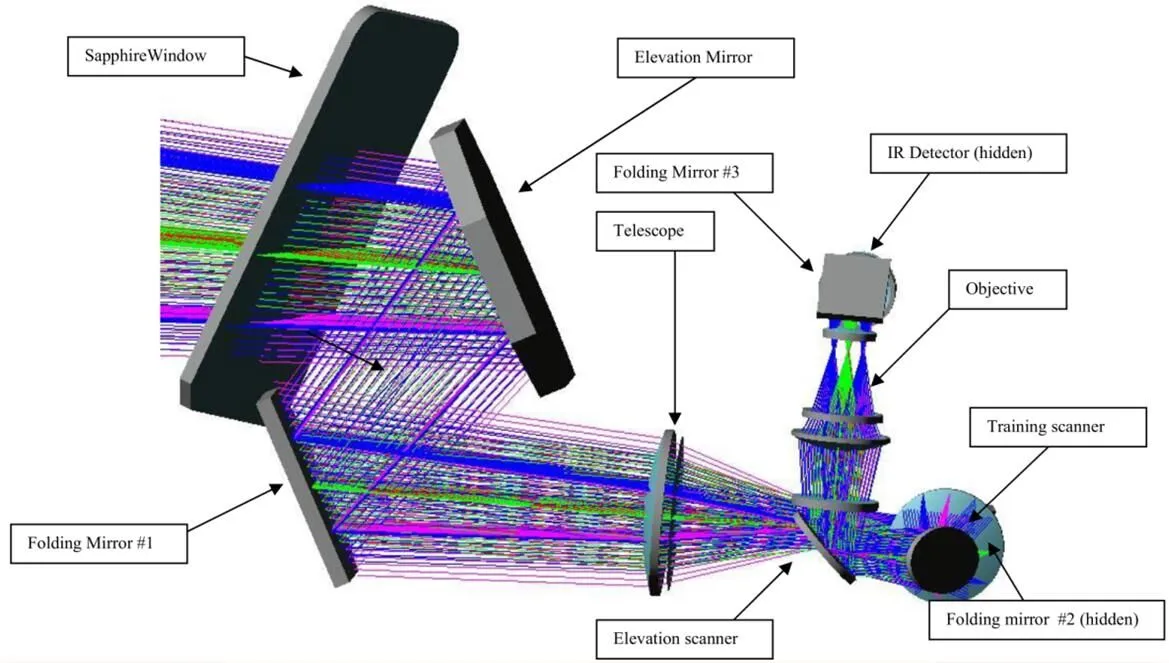
图11 Sagem DS全景成像传感器光学系统示意图
一般采用摆镜做补偿的系统,全景帧频可达到1~2Hz左右,比如2014年法国HGH公司推出的高分辨率中波红外广域监视系统——Spynel-X8000,如图12[10]所示,该系统包括一个每秒旋转一周的360°全方位旋转传感器,采用1280×1024探测器,全景扫描速度为每秒2帧,单帧帧频60Hz。

图12 HGH公司的红外广域监视系统——Spynel-X8000
若要进一步提高全景图像帧频,采用如前所述的摆镜步进凝视运动方案已经不敷应用。比如想要IRST工作在10~12Hz帧频的话,摆镜的加速度将高达30000rad/s2,这已超出了摆镜运动的稳定带宽极限,会导致系统稳定波动大到难以恢复,对系统PSF的影响将是不可接受的。为了消除这种影响,意大利Selex ES公司设计实现了另一种扫描补偿方式。扫描系统利用一个有专利支撑的特殊机构设计扫描覆盖关注区域,保持积分时间内光轴稳定。如图13~15[11]所示,扫描系统采用两个转鼓做连续旋转运动,其中第一个扫描转鼓带动多个反射面匀速旋转产生扫描运动,第二个多边形去拖尾转鼓则以与扫描转鼓反向的同步速度旋转,在积分时间内消除光轴位移。图13[11]表示扫描转鼓通过5个分视场序列扫描获得完整视场。
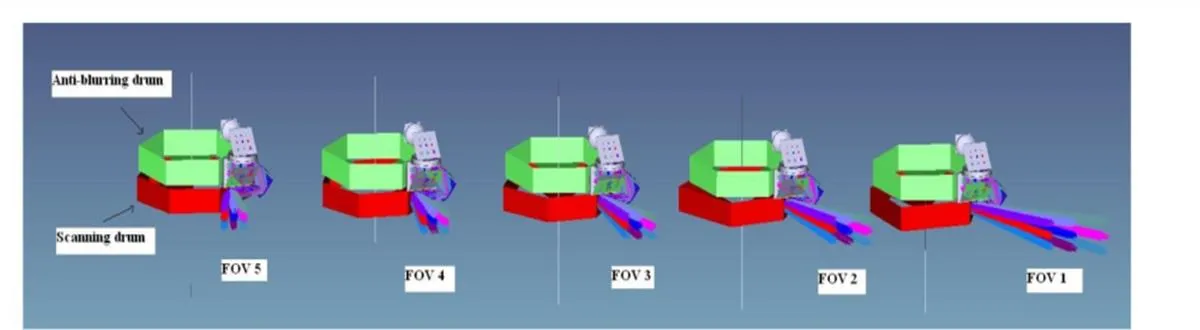
图13 扫描转鼓扫描序列示意图
扫描转鼓和去拖尾转鼓的相应面配合完成每帧采样运动,图14[11]示意了两种转鼓的外形,图(a)所示扫描转鼓的单面尺寸有差异以获得全视场覆盖,图(b)所示的去拖尾转鼓则是一个均匀的六边形外形,以获得同样的光轴稳定性能。图15[11]展示了利用这种扫描补偿方式获得的稳定的全景图像。
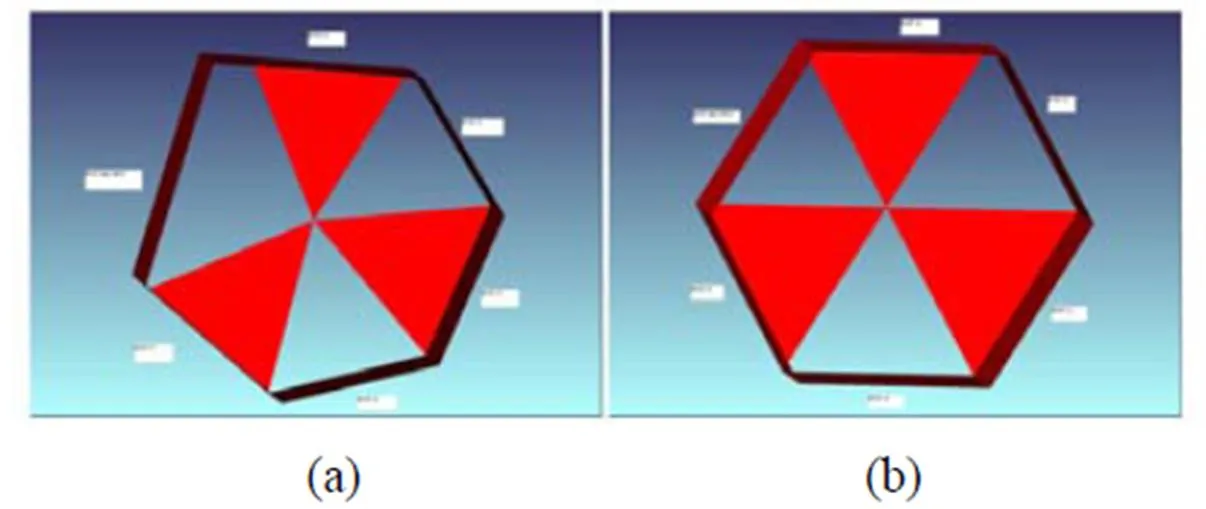
图14 扫描转鼓(a)和去拖尾转鼓(b)

图15 利用转鼓扫描补偿方式获得的全景图像
2.5 分布孔径方式
分布式孔径系统也是全景成像的一个研究热点之一,其中心思想是通过多个不同的成像孔径进行全景空间解析,也即通过孔径数来消除扫描机构或降低扫描压力,同时也降低了系统的复杂性,提高了全景态势感知的实时性,但需要为此付出多光路多探测器带来的成本提升。
法国Thales公司研制的第二代舰载红外搜索跟踪系统是该类型系统的典型代表。全景红外成像头由3个子成像传感头组成,每个子成像传感头采用分布式孔径成像原理,利用一个640×512中波焦平面探测器,通过一个特殊的7段视场光学扫描机构覆盖120°水平视场,在保证足够的图像空间分辨率的前提下,实现了120°大范围的视场搜索,通过3个子传感头围绕桅杆分布安置即可覆盖360°搜索视场,系统如图16[12]所示。

图16 Thales公司的第二代舰载红外搜索跟踪系统
2.6 全景光学镜头成像方式
传统的成像设备基于中心投影法,是人眼观察外部世界的方式,也是针孔相机的成像方式,鱼眼透镜和折反射透镜利用光学手段实现全景成像,其中鱼眼透镜和2.1~2.3节所述的各种旋转拼接法符合人眼视觉的中心投影法原理,折反射全景成像则是属于环带成像,即柱面映射投影。
鱼眼透镜可有效地实现大视场,鱼眼透镜实际上是超广角物镜,超广角物镜由于有非常短的焦距,通常焦距小于16mm,因此能获得接近半球或者大于半球的全景视场,在获得大视场的同时,鱼眼透镜的设计者必须做出牺牲,即允许桶形畸变的存在,结果是除了图像中心的景物保持不变,其它本应水平和垂直的景物沿各个方向从中心向外辐射,缺陷是所得到的图像仍然需要拼接, 成像机理仍然是中心投影法。
为了克服中心投影法的缺陷,人们提出了平面圆柱投影法,在三维空间视场和有限的二维像平面建立了一种新的投影关系,即将三维圆柱区域通过特殊的系统投影到二维平面的圆环区域。图17[13]所示为一种全向相机及其成像结果。

图17 一种全向相机(左)及其成像结果(右)
2.7 数字TDI全景成像系统
南京理工大学何伟基等人的发明专利公开了一种Snapshot型面阵红外探测器TDI扫描成像方法,在面阵型红外焦平面阵列前安装一光机扫描结构,由光机扫描来控制图像的移动。将红外焦平面阵列得到的平移后的图像输入到数据累加处理电路,进行图像移位累加处理,得到所需图像。数据累加处理电路主要由采样电路和数字处理电路两部分组成,通过FPGA控制AD器件进行采样来完成模数转换。在完成模数转换后,将数字图像信号输入数字处理电路,由数字处理电路进行图像的移位累加,最后输出所需的图像。本发明消除了在搜索系统中使用面阵探测器时由于探测器转动带来的拖尾现象,提高了图像的信噪比,利于在目标搜索跟踪系统中及时地发现弱小目标。上海技术物理研究所苏晓锋发表了名为《红外面阵探测器DTDI技术性能分析》的文章,文中技术方案目前还未见到真实的样机报道。
2.8 其他全景成像系统
最近几年全景成像技术成为开发热点,通过各种技术途径实现的产品很多,典型实例见图18[14]所示HGH公司的Spynel-M系列产品,是该公司近年来推出的一款轻小型全景成像系统,尽管未见详细报道其采用的技术方案,但其产品颇具特色,外包络尺寸小于12×20cm,重量仅1.8kg,采用非制冷凝视焦平面探测器,可持续监视360°全景范围,全景帧周期为1s。单个Spynel-M可有效实施1.5km方圆范围内人员入侵预警,实现实时安防监控。

图18 法HGH公司出品的Spynel-M产品
3 全景成像技术方案分析比较
3.1 关于分布式孔径方案
最典型的分布式孔径应用实例是F-35机上的被动式探测系统:EODAS(electro-optical distributed aperture system),光电分布式孔径系统,是美国诺格公司为四代机设计的内置综合光电设备。它能为飞行员提供一个围绕飞机机身的全景视野,飞行员能够“看透”飞机的底部和侧面,主要用途范围是对空作战。
如图19、20[15]所示,该分布孔径系统在机身6处不同的位置上各安置一红外传感器(图21[15]所示),分别负责飞机的左侧、右侧、机背前方、机背后方、机腹前方、机腹后方的视野,使用先进的信号处理运算法,对全机360°范围内来袭的导弹或逼近的飞机进行红外探测及跟踪,并将探测画面显示于飞行员的头盔显示器上,让飞行员能够看见飞机周围的空域情况,因此除了让飞行员具备全空域态势感知外,也能提供导航、导弹警告、以及红外搜索与跟踪的功能。

图19 F35 EODAS分布位置示意图
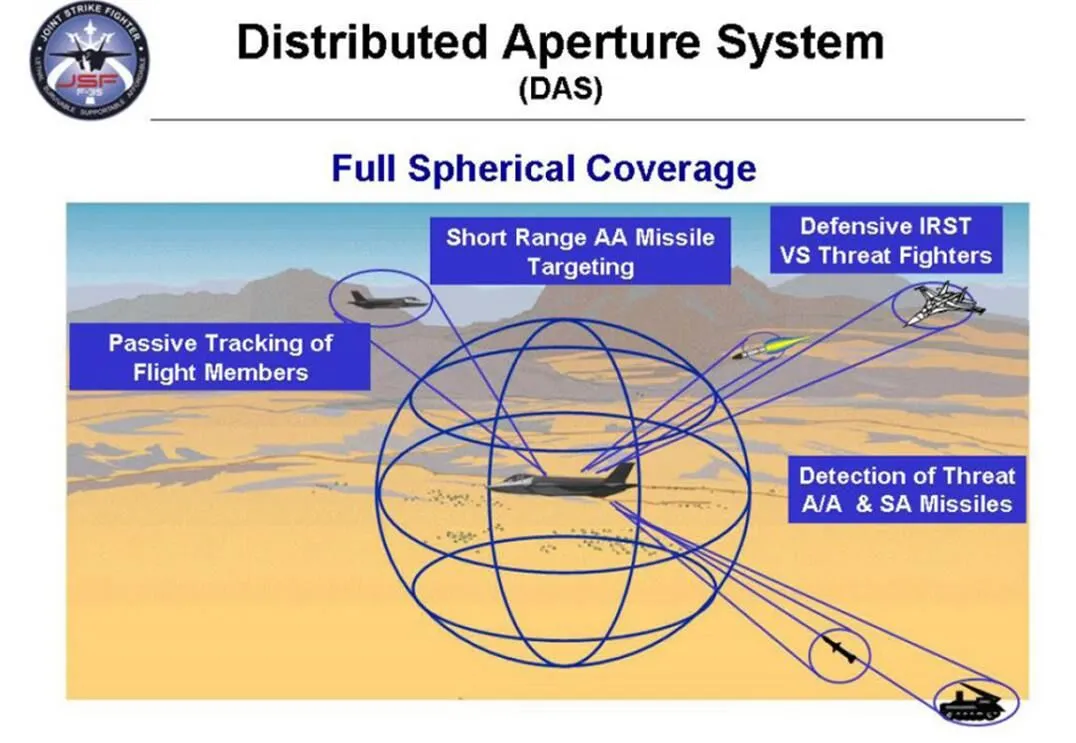
图20 DAS各分布孔径功能示意图
分布孔径系统集成多个传感器用于周边进行态势感知,具备隐身性能好,响应时间短,实时性好,全景帧频高等优点,缺陷是整个系统体积庞大,且由于传感器众多,系统成本很高。故该种成像方式多在机载或舰载应用场合出现。车载方案也有应用,通常基于成本考虑,多选择非制冷红外、低照度电视和普通CCD等低成本传感器,用于武器平台的态势感知没问题。但如果用于火控系统,作用距离难以满足要求,而采用制冷型红外探测器又会使整个系统成本急剧上升。另外由于系统体积庞大,将各个传感器分布在车辆周边,需要整车深度配合,不容易进行整车集成。
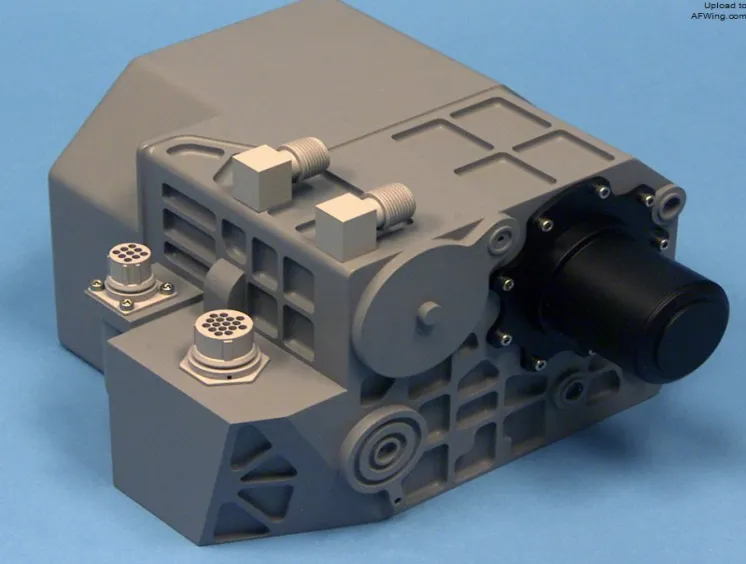
图21 EODAS所用红外传感器
3.2 关于全景光学镜头成像方案
全景光学镜头成像方式由于无需运动部件,即能获得360°的大视场,在很多场合发挥着重要的作用,其中以鱼眼透镜为代表的超广角全景成像技术已经非常成熟,技术上很难再有新的突破。折反射全景成像系统还有很大发展空间,故越来越受到重视,其中全景环形透镜由于其小型化和集成化的优点将会得到更为广泛的应用。但这种全景成像方式的最大弊端是受凝视面阵像元数限制,空间分辨率相对较低。预计在超大面阵器件技术有突破时能有更长足的应用发展。
3.3 关于线扫描和步进凝视扫描方案的比较
线扫描和步进凝视扫描是目前中端红外搜索跟踪系统采用最多的两种方案,其中由于线列型红外探测器出现较早的原因,早期的搜索跟踪系统均是这一类型,步进凝视型搜索跟踪系统是随制冷红外面阵器件工程化后才出现的新体制全景系统,下面针对几个关键环节进行这两种类型全景系统的比较。
1)作用距离的比较
红外搜索跟踪系统的作用距离和目标辐射功率、背景大气条件、红外光学系统性能以及探测器特性等因素密切相关,假定其他条件相同,系统空间截止频率高低对系统作用距离起决定性作用。
在红外成像系统中,其空间截止频率由探测器决定,而探测元的中心距离决定了探测器的空间截止频率。由于线列扫描型FPA行与行探测元的中心距离,可以通过错开排列而连续减小直至到零,所以FPA有足够高的空间截止频率。通过增加参加TDI的探测元的数量,可以提高线列FPA的热灵敏度,这使得带时间延迟积分(time delay integration,TDI)功能的扫描型FPA的热灵敏度和空间分辨率得以很好的平衡。在系统设计中,当要求某一个方向有足够大的视场、而空间分辨率又不能很低时,采用线列FPA就是一个很好的选择。
凝视型FPA探测元的中心距离必须大于少数载流子横向扩散长度,否则就会产生串音。因此,探测元之间的沟道也就决定了凝视型FPA的空间截止频率。由于凝视型FPA的探测元不能错开排列,所以探测元的中心间距大于扫描型FPA的,表现在FPA的调制传递函数上,就是空间截止频率低于扫描型FPA。在实际应用中,中等规模(254×254、320×240、384×288)的凝视型FPA成像有比较明显的马赛克效应[16]。
在长波波段,线扫描系统能量足够的情况下,若采用较长线列的扫描型FPA,比如576、768或1024以上系列,空间分辨率优于当前主流的640×512凝视探测器,故作用距离更远,对空搜索小目标占优。但其他波段则不然,详见以下分析。
2)能量的比较
线扫描型搜索跟踪系统由于需要连续将周围场景的红外辐射信号投射到线列探测器上,因此导致入射信号在每个探测器单元上驻留的时间(即积分时间)较短,通常只有十几个微秒(取决于周视帧频),为了得到足够的灵敏度,一方面采用TDI的方式在扫描方向进行能量的延时积分,可以一定程度弥补能量的不足,另外需要确保足够的探测器像元面积,通过增加光敏面积提高信噪比;而步进凝视系统采用面阵器件,积分时间可以高达几毫秒到几十毫秒量级(取决于周视帧频),很好地保证了能量累积,有利于系统信噪比及系统的极限作用距离两项核心指标的提升,并且在能量足够的前提下可以进一步减小探测器面元尺寸以达到减小系统体积的目的。另外,即使将凝视器件本身的帧频调整到100Hz以上依然可以保证有几个毫秒的积分时间,从而步进凝视系统的全景扫描时间可以减小到1s以内(前提是补偿反射镜的控制响应能跟上),在扫描速度上潜力巨大,而线扫描体制下器件积分时间已经很短,限制了进一步提高扫描速度的可能性。正是由于能量方面的巨大优势,步进凝视搜索跟踪系统也越来越受到重视。
3)搜索效率的比较
线扫描方案的工作机制决定了该类型搜索跟踪系统对目标的搜索效率不如步进凝视型的高。图22和图23是一种极限情况对比,如果采用线扫描方案,假如在0时刻时场景中没有发生特殊状况,而1时刻时在刚扫过的区域出现紧急情况,线扫描系统只有在下一次扫过时才能发现状况,最大延迟长达一个帧周期(通常是秒的量级),而如果是步进凝视系统,假如凝视期间正好扫描到该区域,就可以及时发现紧急情况,在如图22和图23的极限情况下,步进凝视系统的响应时间可以比线扫描系统提前近一个帧周期(相同的系统帧频条件下)。尽管相同帧频的情况下线扫描型和步进凝视型2种系统扫描一周所需要的时间相等,但由于系统机制的不同,对突发事件的捕捉能力步进凝视系统会更占优,尤其面对瞬息万变的战场局势时,哪怕是能够抢占一点先机有时也是决定性的。
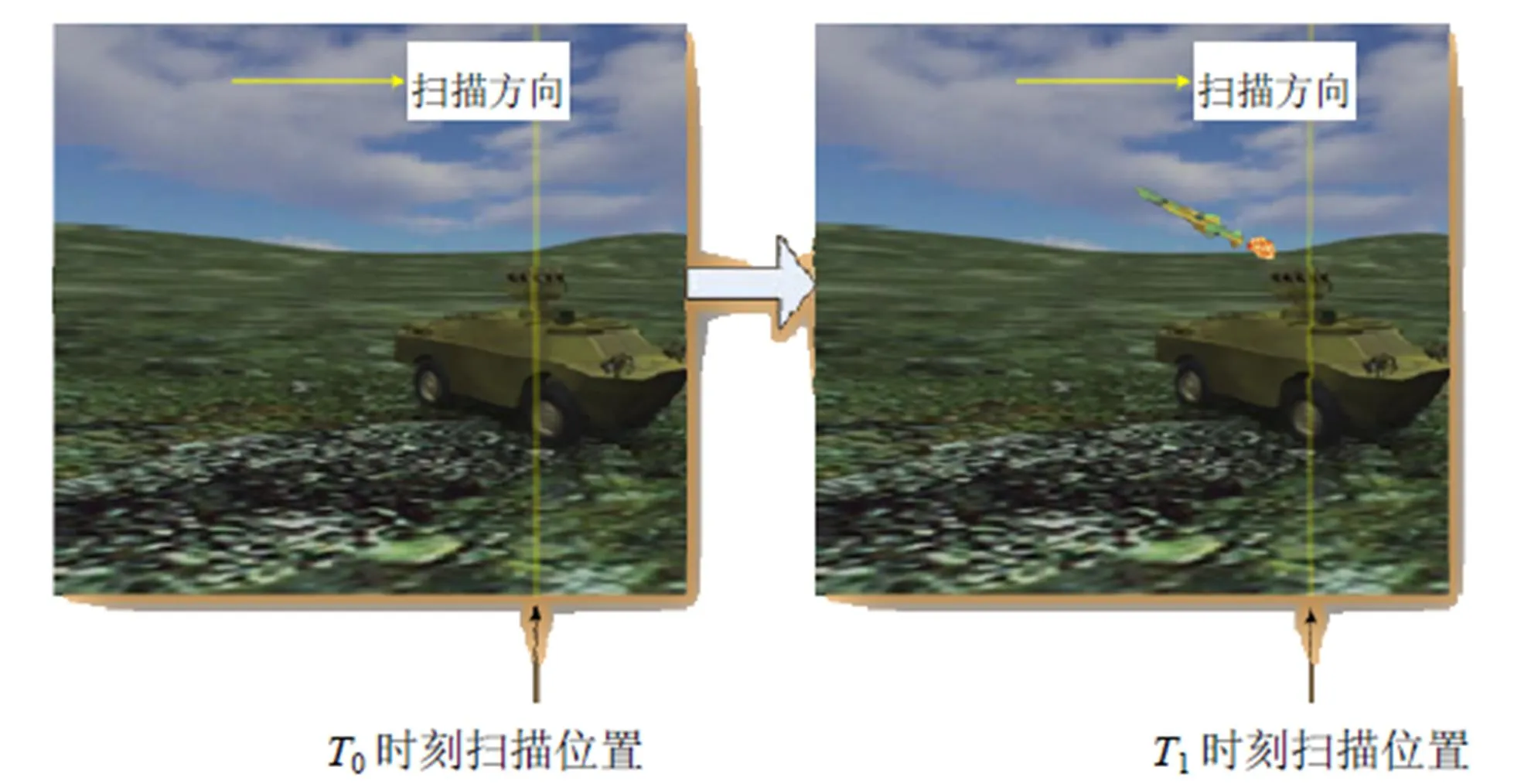
图22 线扫描搜索跟踪系统扫描响应示意图

图23 步进凝视搜索跟踪系统扫描响应示意图
4)经济性的比较
线扫描方案的优点是利用线列探测器天然的便于进行横向扫描的特点来进行全景成像,对器件没有面阵要求,降低了器件压力,可以通过加大器件线列长度(如从早期的288发展成576、768甚至更大规格)来提高水平分辨率。用数千个探测元就能获得画质很好的热图像。而要达到同样的图像质量,凝视型FPA探测元的数量要增加2个数量级。
大面阵的凝视型FPA,技术上很难实现,经济成本较高。FPA采用读出电路后,为保证应有的空间分辨率,探测元与读出电路均采用直接注入方式,这就要求探测元有比较高的零偏阻抗,而对能带在0.1eV的窄禁带HgCdTe半导体,在技术上很难做到面积大、组份均匀而缺陷又少,因此,提高零偏阻抗、制备大规模的面阵很困难。当探测器的尺寸达到一定程度时,还要受HgCdTe、Si等半导体材料热膨胀系数的限制,从材料到器件的工艺复杂度都是数量级的提高,从性价比的角度考虑,尤其在量大面广的应用中有一定局限性。
5)器件适应性的比较
由于线扫描型搜索跟踪系统将器件的积分时间约束到十几ms的量级,限制了该类型系统基本只能采用制冷长波线列红外探测器(对于地面应用,景物的长波辐射几十倍于中波,因此可以支撑较短的积分时间),其中的特例像法国Thales公司早期研发的“天狼星”(SIRIUS)红外搜索跟踪系统,采用长波和中波同时探测,但必须通过高达10级的TDI和小的F数(0.9)来保证足够的能量。除了少量例子外,绝大多数线扫描型搜索跟踪系统均采用长波制冷器件,而步进凝视型系统由于积分时间的保证,可以在同一个架构下采用不同的探测器(制冷长波、制冷中波、非制冷长波、可见光),系统可根据使用环境、目标特性和指标要求配置不同的器件(如湿热环境下可考虑选择中波器件,其它应用选择长波应用),在器件的选择上要更灵活。
综上所述,采用这两类FPA的搜索跟踪系统各有优劣,在较长时期内还将并行发展,但凝视型器件构成的系统是未来发展趋势。
4 关键支撑技术
以上几种应用需要发展的关键支撑技术可归纳总结为以下几种共用技术。
4.1 快速摆镜控制技术
快速摆镜在系统中完成功能为:在热像单帧积分周期内与方位机构反向匀速运动,补偿实现热图在红外探测器焦平面相对静止;积分间隙期间则快速回扫,使凝视空间回到起点,实现全景无缝拼接。机构设计必须十分精巧,具有结构紧凑、速度快、精度高、带宽高、负载惯量大等特点,控制算法复杂。
4.2 高精度稳定平台设计技术
稳定平台的主要功能是稳定光学传感器光轴,隔离车载振动对光轴带来的影响,稳定平台精度不高将直接影响成像质量,从而影响对视频图像的有效判读。高精度稳定平台研制技术主要可分解为以下几方面的设计工作:
①高精度轴系结构设计
作为双轴双框架的稳定平台,要达到技术指标所要求的稳定精度和角位置精度,轴系部分的结构设计至关重要。要同时考虑到精度、承载能力、热稳定性、体积、重量、加工工艺性和装配工艺性等诸多因素。在实际的设计过程中需采用计算机三维造型来辅助设计,并对关键的承载结构进行了强度分析。在加工和装配过程中需解决大口径薄壁轴承装配、传动齿轮齿隙调整等技术难题。
②薄壁铸件设计
稳定平台的结构件中,中部壳体、前球壳、后球壳、俯仰框架等关键零件属于薄壁铸件,在制造工艺上有许多困难,容易出现缩孔、变形、裂纹等缺陷,极大的影响产品的强度和刚度,因此需要通过对材料、各种铸造工艺的认真分析和对零件设计的不断修改和优化,制定合理的制造工艺流程。
③高稳定精度控制系统设计
控制系统是稳定平台实现各项功能和满足性能指标的核心部分。为了达到指标要求的稳定精度,需进行细致地总体设计,对于测量元件和执行元件等关键部件指标反复论证,拟采用全数字伺服控制技术,在硬件上使用高速数字信号处理芯片来进行计算,在控制算法上运用经典控制理论与非线性区处理相结合的手段以确保平台的高稳定精度控制。
4.3 全景扫描模式下的目标跟踪技术
不同于通常的视频跟踪应用,当红外搜索跟踪系统处于全景工作状态时,尽管热像仪的工作帧频通常还是50Hz,但系统的工作帧频已降低到0.5~1Hz数量级,因此除了需要在全景视频中进行空间的目标匹配和跟踪外,还需要在相对较低的系统帧频下进行时间域的跟踪匹配,由于系统刷新时间较长(1~2s的回归时间),目标在帧与帧之间的形状、位置甚至对比度都可能发生较大变化,因此在进行相关匹配时必须研究轨迹外推、模板外推,运用反射变换等多种算法解决视频刷新慢所带来的相关性降低的问题,提高跟踪准确率,降低误识别概率。
4.4 全景成像显示控制技术
由于所有的图像、数据信息都需要在显示控制组件上显示,而与以往其它光电系统的工作性质不同,全景成像系统可进行准实时的周边态势感知和目标搜索,并且可通过操控界面改变系统的工作方式和全景显示模式,因此全景成像显控部分的技术表现将会直接影响到全景系统的性能发挥和使用效率,该部分技术主要研究内容如下:
①全景图像拼接
在全景工作模式下,由于从热像仪送至显控组件的视频的每一帧都是不同角度的红外图像,需要在显控端将这些图片进行缓存和全景显示,因此需要将一组相互间存在一定重叠部分的图像序列实施配准、平滑从而形成一幅包含各图像序列信息的全景视场的新图像,另外还需要对全景图像进行畸变校正。
②多层次全景显示及互操作人机工程研究
需要研究如何充分利用显示界面高效动态显示各种不同层次的图像信息以达到信息最大化的目的,同时需要从作战使用的角度、人机工程的角度研究互操作的需求与实现,尽量发挥全景系统的潜力和优势。
③软硬件资源需求评估
在开发显示控制组件的同时,深入进行软硬件资源需求分析与评估,在型号阶段与多功能显控系统集成提出明确的资源需求(如显示需求、计算需求、存储需求、操控需求等)。
在此值得一提的是HGH公司开发的Cyclope全景图像处理显示控制软件,如图24[10]所示,软件功能齐全,界面设计友好,合理排布了压缩显示全景图、局部区域展宽显示图和360°环带显示、360°雷达显示图等,对感兴趣区域可以展开全分辨显示,还可以视需要显示定位信息,自动告警等等。
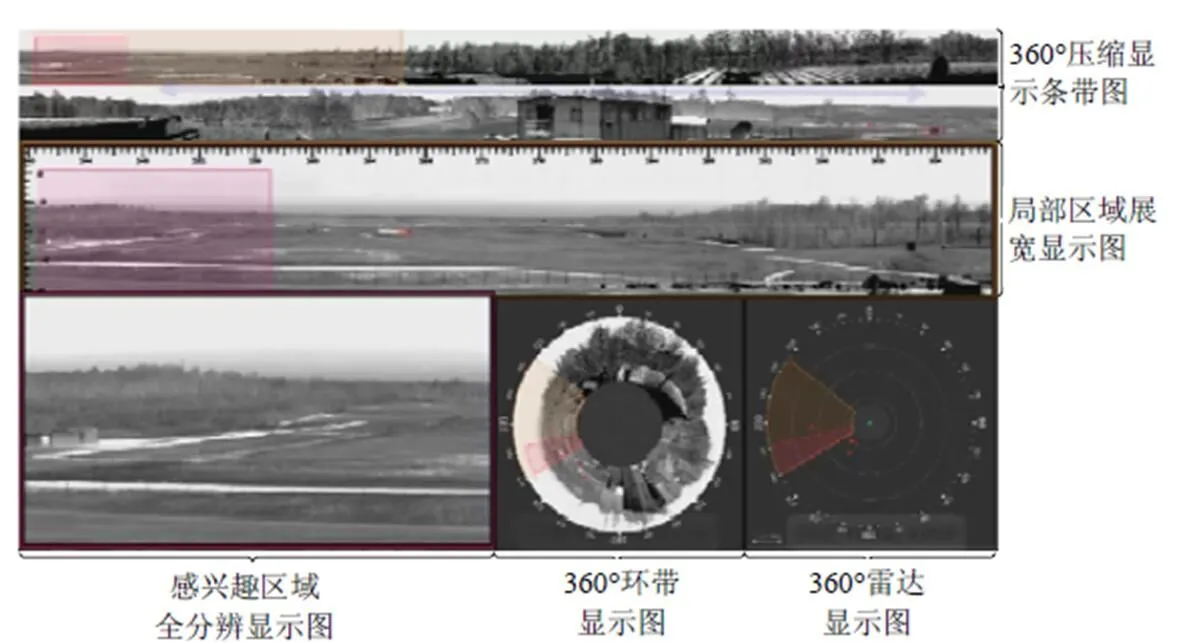
图24 HGH公司开发的Cyclope全景图像处理显示控制软件
4.5 传感头集成设计技术
由于在全景工作模式下,扫描稳定平台和热像仪机内的扫描摆镜需要进行同轴反向差速转/摆动,因此在系统内部布局时需优先考虑热像仪的安装位置,这样就给传感头内部总体布局带来很大的压力,如果不能有效利用内部空间包络,会导致传感头体积大、重量大,不光会增加控制负担,且会增大备弹面,因此需要充分考虑传感头内部的集成设计,对各零部件的质量质心进行精确模拟,在布局上合理分配,做到既满足空间尺寸要求,又达到各个轴向的最优平衡,以减少装调阶段配平的工作量和配平重量;采用有限元分析软件,对各关键零件进行结构分析,在满足强度可靠性要求的前提下达到体积重量的最优化;在电气布局上,让相关功能对应的电路板、执行元件、反馈元件、传感器等尽量在空间布局上靠近,以减小相关连接电缆的长度,提高布局的简洁性和可靠性;在电缆选择和布局上,选取柔性电缆并进行合理布局,以减少电缆对伺服稳定控制的干扰,以利于伺服精度和稳定精度的提高。
5 发展趋势
光电设备与计算机处理和存储技术的结合密不可分,信号和图像误差、信号识别和方位预测,信号传输与融合展示都越来越依赖计算机技术的进步才能取得实质上的突破;超分辨力、图像融合、图像去模糊,以及智能视频分析等等,正在成为光电系统的关键技术。而随着精确打击的发展,对侦察图像的清晰度、目标定位精度的要求不断提高,也对伺服稳定控制技术和像移补偿技术提出了新的要求[17]。
总的说来,红外搜索跟踪和全景态势感知系统正在向全天候、全空域、多光谱、多模式、兼地空的综合模式演进,其中红外全景成像技术相应的发展趋势为:单波段到多波段、大面阵到超大面阵分辨、高帧频到超高帧频、更智能化等等,朝着发现距离更远,看得更清晰,实时性更好方向不断进步。
[1] 杨百剑, 万欣. 新一代机载红外搜索跟踪系统技术发展分析[J]. 激光与红外, 2011, 41(9): 961-964.
YANG Baijian, WAN Xin. New generation of IRST technology in plane development[J]., 2011, 41(9): 961-964.
[2] 游蕾. 红外搜索与跟踪系统扫描地平线[J]. 外国海军文集, 2005(5): 17-22.
YOU Lei. IRST scan horizon[J]., 2005(5):17-22.
[3] 丁立伟, 甘宇红, 王宗俐, 等. 中波红外和长波红外探测系统性能的比较与选择[J]. 红外, 2014, 35(5): 1-6.
DING Liwei, GAN Yuhong, WANG Zongli, et al. Performance comparison and selection of mid-wave and long-wave infrared detection system[J]., 2014, 35(5): 1-6.
[4] 韩根甲. 舰载红外搜索跟踪系统的最新现状与发展趋势[J]. 现代防御技术, 2007, 35(3): 109-114.
HAN Genjia. Present status and trend of shipyard IRST[J]., 2007, 35(3): 109-114.
[5] 陈兆兵, 郭劲, 苗用新, 等. 基于步进凝视控制策略的告警系统 [J]. 光电工程, 2008, 35(12): 9-12.
CHEN Zhaobing, GUO Jin, MIAO Yongxin, et al. Warning System Based on Step-stare Control[J]., 2008, 35(12): 9-12.
[6] 范宏波. 基于1152×6红外长波线列探测器的高性能搜索预警系统[J],红外技术, 2010, 32(1):20-24.
FAN Hongbo. A High Performance IRST Based on 1152×6 LWIR Detectors[J]., 2010, 32(1): 20-24.
[7] IRSTs Search New Horizons[Z]. Jane S Navy Interna—tional April 2005.
[8] A. N. Belbachir, R. Pflugfelder, R. Gmeiner. A Neuromorphic Smart Camera for Real-time 360° Distortion-free Panoramas[C]//, 2010: 221-226.
[9] PO Nouguès, P Baize, F Roland,et al. Third-generation naval IRST using the step-and-stare architecture[C]//, 2008, 6940: 69401B.
[10] Vincent Leboucher, Gilles Aubry. High-resolution panoramic images with megapixel MWIR FPA[C]//, 2014, 9070: 90700F.
[11] G Barani, A Rossi, M Diani, et al. Development of a panoramic third generation IRST: initial study and experimental work[C]//, 2013, 8704: 87040J/
[12] Christophe Grollet, Yves Klein. ARTEMIS:Staring IRST for the FREMM frigate[C]//, 2007, 6542: 654233-11.
[13] KC Huang, PY Chien, CA Chien, et al. A 360-degree Panoramic Video System Design[J].2014,(VLSI-DAT). 2014: 1-4.
[14] HGH Infrared system. Spynel-M[EB/OL]. [2016-02-10]. http://www. hgh-infrared.com.cn.
[15] DAVID A. Fulghum. IR Sensors Cut From F-22 Appear on Joint Strike Fighter[J]., 2000, 153(11): 74-75.
[16] 蔡毅. 红外系统中的扫描型和凝视型FPA[J]. 红外技术, 2001, 23(1):6-10.
CAI Yi. The Scanning and Starring FPA in Infrared Systems[J]., 2010, 32(1): 6-10.
[17] 刘忠领, 于振红, 李立仁, 等. 红外搜索跟踪系统的研究现状与发展趋势[J]. 现代防御技术, 2014, 42(2): 95-101.
LIU Zhongling, YU Zhenhong, LI Liren, et al. Status and Development Trend of Infrared Search and Track System[J]., 2014, 42(2): 95-101.
Panoramic Imaging Technology Applied in IRST and Status Awareness System
CHEN Jie1,2,ZHANG Ruolan1,2
(1.,650223,; 2.650223,)
The paper proposes the advantage of infrared panoramic imaging technology applied in IRST and status awareness system,gives several main panoramic imaging schemes,and illustrates typical application examples. The characters and application areas of panoramic imaging schemes are analyzed and compared with. Key technologies of panoramic imaging are summarized and finally the developing trend is prospected.
panoramic imaging,IRST,status awareness,image stitching,step-and-stare
TN942
A
1001-8891(2016)04-0269-11
2016-02-10;
2016-03-12.
陈洁(1975-),女,研高工,主要研究方向为红外系统研发。
张若岚(1972-),男,研高工,主要研究方向为光电系统。
猜你喜欢
光学精密工程(2023年1期)2023-02-06 14:08:20
中国光学(2021年6期)2021-11-25 07:48:32
数学物理学报(2021年3期)2021-07-19 06:02:08
电影新作(2020年1期)2020-11-14 19:01:11
中国医疗设备(2019年1期)2019-01-15 12:10:54
电影新作(2016年6期)2016-11-20 09:04:28
视听(2016年12期)2016-03-22 03:19:06
中国铁道科学(2015年4期)2015-06-21 06:46:06
中国光学(2015年1期)2015-06-06 18:30:20
激光与红外(2015年10期)2015-03-23 06:07:18
