基于仿人机器人伺服关节步态实验研究
2016-02-24 03:29何洪军刘福强马传宝袁德宇张东宁
微特电机 2016年12期
何洪军,刘福强,马传宝,袁德宇,张东宁
(中国电子科技集团公司第二十一研究所,上海 200233)
基于仿人机器人伺服关节步态实验研究
何洪军,刘福强,马传宝,袁德宇,张东宁
(中国电子科技集团公司第二十一研究所,上海 200233)
讨论了仿人机器人采用伺服电机作为驱动时所需步态的特征,对不同人的走和跑等步态设计了相应的实验,通过测试仪器获得相应数据。通过分析得到了相应的运动特征,为仿人机器人的伺服电机选型提供了指导,为仿人机器人的步态研究提供了指导和参考。
伺服电机;步态;关节; 特征
0 引 言
随着信息化时代的不断发展,机器人的应用越来越广泛。国家为了鼓励机器人产业的发展颁布了《中国制造2025》研究规划,大力扶持机器人的智能化、信息化发展。机器代替人是现代工业发展的必然趋势,很多工厂的重复性劳动都已被工业机器人所取代,提高了生产效率降低了劳动成本[1-2]。而仿生机器人,特别是仿人机器人方面的产品问世很少,原因在于仿人机器人的步态分析复杂,很难提供一种通用的步态方式符合所有人的行走步态特征。此外,仿人机器人关节用电机都是特征扁平的微型电机,需满足高转矩、低脉动的特点,因此在其设计、加工和制造都是技术难点[3]。关节用伺服电机中国电子科技集团公司第二十一所有自主研发能力,可以满足相应关节电机的要求。在步态研究方面,国内外已有很多科研机构开展了步态方面的探索,哈尔滨工程大学针对仿人机器人开展了步态的理论推导和分析,在理论上得到了人体行走的步态行为数学模型描述[4];以色列Rewalks机器人公司,针对不同人的步态特征给出了相应的步态运动曲线[5];美国加州理工大学,针对仿人机器人做了行走步态实验,得到了行走步态的运动特征[6-7]。但是,上述研究都没有完整地开展过仿人机器人步态测试实验的研究,没有给出仿人机器人在不同运动模式下的步态特征,因而针对仿人机器人步态通用化的设计急需对不同步态开展实验研究,为仿人机器人实现类人化提供技术基础。因此,本文针对仿人机器人用伺服电机所需步态特征,通过对不同人的走和跑等步态进行了实验,得到了相应的运动特征[8],为仿人机器人的步态研究提供了指导和参考。
1 实验原理
本文针对不同的人进行了走、跑和蹲的步态实验,实验中所用仪器有惯性传感器、数据采集卡和同步数据合成仪。具体实验仪器设备如图1、图2所示。

图1 实验所用数据采集卡和同步数据合成仪

图2 惯性传感器安装图
惯性传感器是一种可以检测和测量加速度、关节旋转角度、功率、位移、冲击和震动的多自由度运动传感器。本实验采用了7个惯性传感器,分别布置于脚背、膝盖、大腿及后背,当人体运动时各布置的惯性传感器将采集所在部位的数据,然后通过数据采集卡及同步数据合成仪,给出膝关节和髋关节旋转的角度、角加速度和功率等数据值。
实验过程中选取3个不同的人进行了行走、跑步和上下台阶的步态实验,并对相应的实验数据进行了整理分析,提取了多个周期在一个步态下的合成图,为进一步得到通用步态特征数据提供参考。
2 实验过程
路面行走步态实验,通过3个不同体重和身高的人进行步态实验,选取采集数据的20个周期得到相应各关节的角度、加速度、角加速度图。实验结果如下。
2.1 行走时步态特征
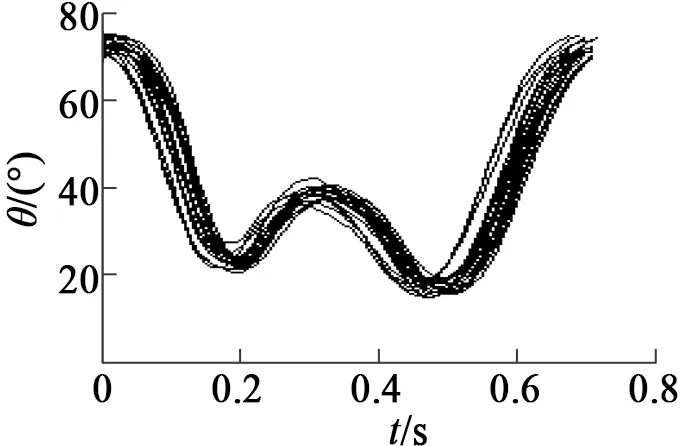
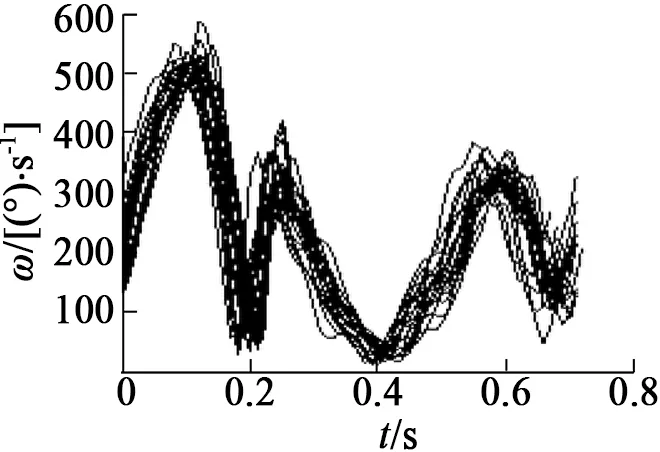
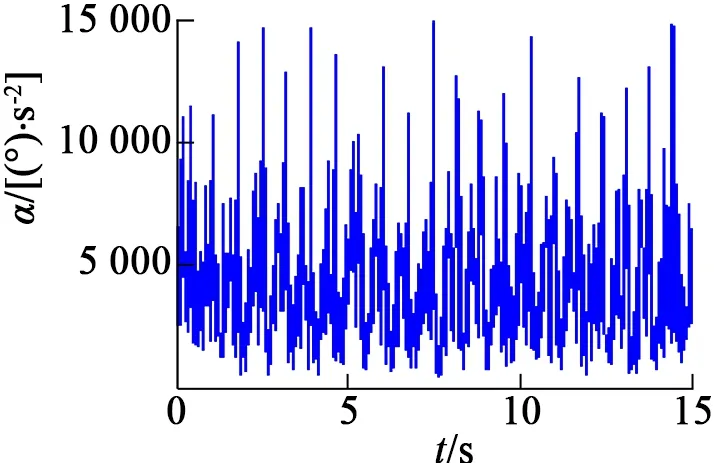
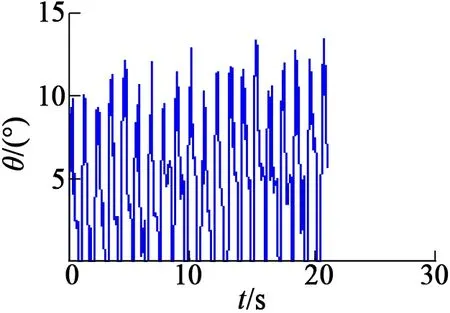
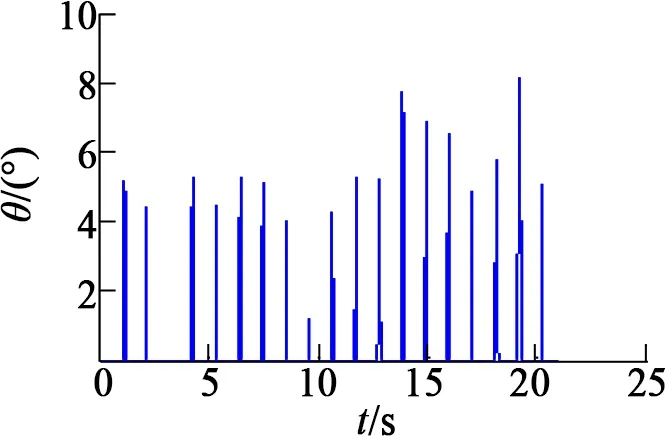
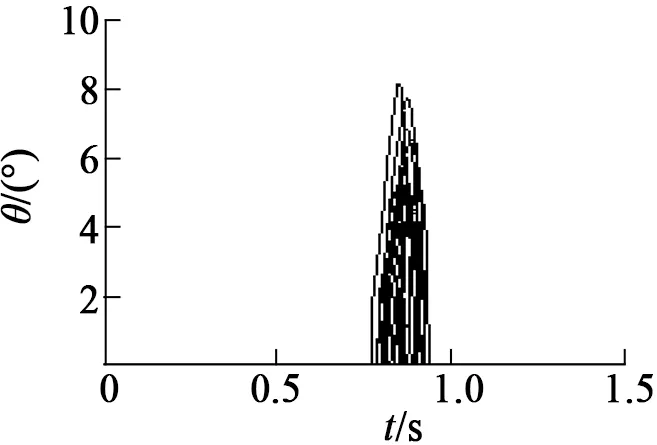
3个不同体态的人分别以速度0.8 m/s和1 m/s行走进行步态测试,经过实验分析得到行走时三人共有的膝关节和髋关节步态特征曲线如图3~图8所示。
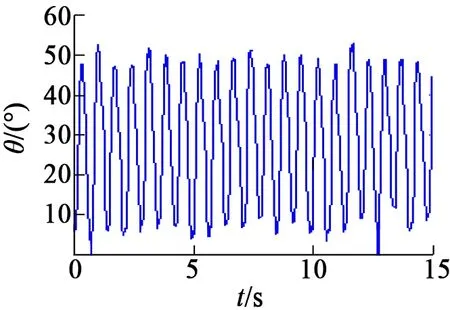
(a) 连续分布曲线
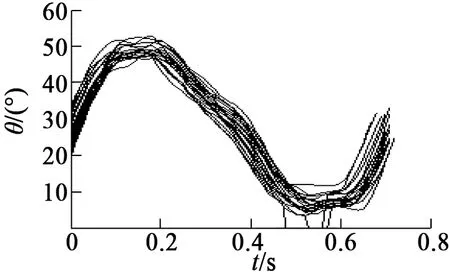
(b) 叠加分布曲线

(a) 连续分布曲线
(b) 叠加分布曲线

(a) 连续分布曲线

(b) 叠加分布曲线

(a) 连续分布曲线
(b) 叠加分布曲线

(a) 连续分布曲线
(b) 叠加分布曲线
(a) 连续分布曲线

(b) 叠加分布曲线
通过3个不同的体态的人进行了多次数据采集及分析,分别得到了三人行走时共有的髋关节前后伸展步态特征、髋关节内旋步态特征、髋关节外旋步态特征、膝关节前后伸展角度特征、膝关节角速度特征和膝关节角加速度特征。
通过对行走步态的测试,可以根据髋关节随时间变化的角度曲线,进行髋关节运动步态运动的规划,进而选择相应的伺服电机完成相应的动作。从上图可以看出,膝关节前后伸展的运动幅度比髋关节大,因而膝关节运动时有极大的运动角速度和突变的角加速度,可以结合膝关节行走运动步态的3个数据特征,对膝关节的步态进行规划,最后配备相应的伺服电机完成相应的动作。
2.2 跑步时步态特征
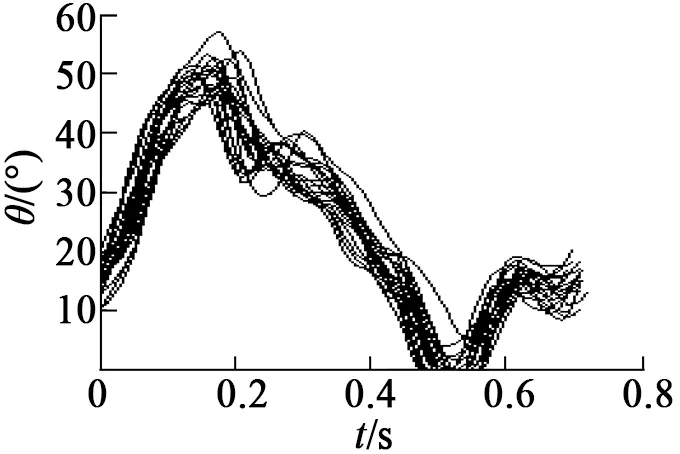
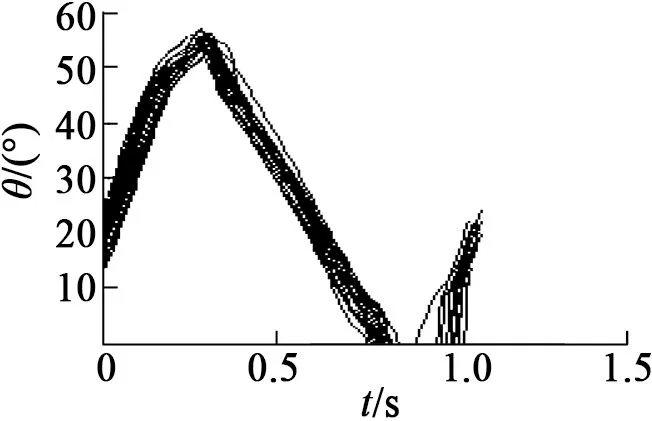
3个不同体态的人分别以3.5 m/s和4.9 m/s的速度跑步进行步态测试,经过实验并进行相关分析得到跑步时三人共有的膝关节和髋关节步态特征曲线如图9~图14所示。

(a) 连续分布曲线
(b) 叠加分布曲线
(a) 连续分布曲线

(b) 叠加分布曲线
(a) 连续分布曲线
(b) 叠加分布曲线

(a) 连续分布曲线

(b) 叠加分布曲线

图13 跑步时膝关节前后伸展角速度特征曲线
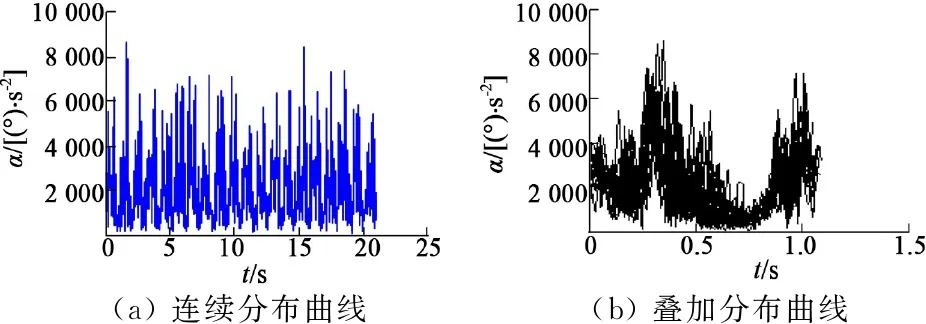
图14 跑步时膝关节前后伸展角加速度特征曲线
通过3个不同体态的人进行了多次跑步数据采集及分析,分别得到了三人跑步时共有的髋关节前后伸展步态特征、髋关节内旋步态特征、髋关节外旋步态特征、膝关节前后伸展角度特征、膝关节角速度特征和膝关节角加速度特征。
通过对跑步态的测试,可以根据髋关节随时间变化的角度曲线,进行髋关节运动步态运动的规划,进而选择相应的伺服电机完成相应的动作。从上图可以看出膝关节前后伸展的运动幅度比髋关节大,因而膝关节运动时有极大的运动角速度和突变的角加速度,可以结合膝关节行走运动步态的3个数据特征,对膝关节的步态进行规划,最后配备相应的伺服电机完成相应的动作。
3 结 语
本文针对仿人机器人用伺服电机所需步态的特征,通过对不同的走和跑等步态进行了实验,得到了相应的髋关节和膝关节的步态运动特征,为仿人机器人的步态行走和稳定性研究提供了数据参考,为仿人机器人伺服关节的运动提供了对照特征,为进一步研究仿人机器人的步态运动提供了参考。
[1] SCHACHE A G,BLANCH P D,RATH D A,et al.Intra-subject repeatability of the three dimensional angular kinematics within the lumbo-pelvic-hip complex during running[J].Gait and Posture,2002,15(2):136-145.
[2] CHENG C,ALBERT B,JAMES A,et al.Sudden turns and stops while walking:kinematic sources of age and gender difference[J].Gait and Posture,1998,7(1):45-52.
[3] KISS R M,KOCSIS L,KNOLL Z.Joint kinematics and spatial-temporal parameters of gait measured by an ultrasound-based system[J].Medical Engineering & Physics,2004,26(7):611-620.
[4] ZIJISTRA W,HOF A L.Assessment of spatio-temporal gait parameters from trunk accelerations during human walking[J].Gait and Posture,2003,18(2):1-10.
[5] 胡雪艳,郭忠武.正常成人步态特征研究[J].中国康复理论与实践.2006,12(10):80-85.
[6] MIKI H,SUGANO N,HAGIO K,et al.Recovery of walking speed and symmetrical movement of the pelvis and lower extremity joints after unilateral THA[J].Journal of Biomechanics,2004,37(4):443-455.
[7] PIJNAPPOELS M,BOBBERT M F,Jaap H. Van Dieen.Contribution of the support limb in control of angular momentum after tripping[J].Journal of Biomechanics,2004,37(12):1811-1818.
[8] 范金城,梅长林.数据分析[M].北京:科学出版社,2002.
作者简介:何洪军, 博士研究生,主要从事机器人整机设计、机器人控制系统设计、伺服关节驱动设计等研究。
Experimental Study on Human Gait Characteristics of Servo Joint Based on Humanoid Robot
HEHong-jun,LIUFu-qiang,MAChuan-bao,YUANDe-yu,ZHANGDong-ning
(No.21 Research Institute of CETC,Shanghai 200233)
It is discussed that servo motor of the humanoid robot needs human gait characteristics in this paper. Through different persons walking and running, the test bench is designed and the data of human gait characteristics is obtained from test equipment. Through analysis, movement characteristics can be concluded to direct choosing the servo motor and providing the reference and direction for the gait research of robot.
servo motor; gait; joint; characteristic
2016-07-28
盛奋华(1978-),女,硕士,讲师,主要从事电子电路研究。
TM383.4
A
1004-7018(2016)12-0040-04
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
微特电机(2020年11期)2020-12-30
卷宗(2019年34期)2019-02-18
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
自动化学报(2018年6期)2018-07-23
通信电源技术(2018年3期)2018-06-26
中华骨与关节外科杂志(2016年3期)2016-05-17
工业设计(2016年6期)2016-04-17
现代制造技术与装备(2016年12期)2016-04-06