
一种机械调磁永磁同步电机的联合仿真研究
2016-02-24 03:29:03刘细平谢清华钟清伟
微特电机 2016年12期
刘细平,谢清华,徐 晨,钟清伟
(江西理工大学,赣州 341000)
一种机械调磁永磁同步电机的联合仿真研究
刘细平,谢清华,徐 晨,钟清伟
(江西理工大学,赣州 341000)
介绍了目前电机仿真分析研究的现状,针对传统机械调磁电机偏机械或电磁特性的不足之处,提出了通过机电联合仿真以实现机械与电磁特性合理仿真的新途径。然后详细描述实现机电联合仿真的原理与方法。以机械变磁通轴向磁场永磁同步电机为研究对象,通过在ADAMS/View中建立电机机械调磁装置模型,与NATLAB/Simulink中所建立的电机本体控制模型进行联合仿真。仿真结果验证了联合仿真的正确性,为以后机电联合控制的研究开发提供了新的方法。
联合仿真;机械调磁;永磁同步电机
0 引 言
随着全球经济的快速发展,对石化燃料的需求不断增长,而由于石化燃料的不可持续性,所以全球范围内的能源紧缺显得越来越突出。在我国的能源结构中,煤炭占据着绝对的主导地位,但随着近几十年来疯狂的挖采,煤炭资源也面临着枯竭的危险。煤炭的大量使用所导致的环境问题也日益突出,发展清洁型可持续性能源迫在眉睫。风能作为一种可持续能源,具有清洁无污染、蕴量巨大、可再生及分布广泛的特点,特别适合作为优化我国能源结构和改善人居环境的替代能源[1]。而风能转变成电能的关键就是电机,电机性能的优劣以及稳定性直接关系着发电效率的高低和电能质量的优劣。
永磁同步电机因其具有结构简单、损耗小、效率高及高功率密度的特点,被广泛应用于风力发电场合。然而,现有的永磁同步电机都存在着永磁体存在退磁风险、磁场不可调的缺点,在一定程度上限制了其发展。为解决在新能源发电场合中存在能源随机性强、用户对电能质量要求较高的矛盾[2-3],有规律地调节永磁同步电机工作磁场强弱成为重要手段之一。
作为电机领域的研究热点之一,有效调节电机磁场强弱的方式正受到越来越多学者的关注。近年来,经过研究学者的不断努力,提出了多种调磁电机,如混合励磁电机、记忆永磁电机、机械变磁通电机等[4]。而此类电机均存在着调磁控制困难、功率密度低、运行可靠性低等不足之处。
本文所提出的新型机械变磁通轴向磁场永磁同步电机,由双转子单定子轴向磁场永磁同步电机和机械调磁装置两部分组成,弥补了传统电机永磁用量多、运行可靠性低等缺点,在完全无励磁功率损耗的基础上实现电机高效率和高功率密度。此类新型机械变磁通永磁同步电机具有结构简单紧凑、磁力线集中和高转矩密度,调磁控制简单且弱磁能力强的优点,在恒功率驱动和恒压发电等领域具有重要的应用价值。
1 电机基本结构及工作原理
1.1 电机基本结构
机械调磁轴向永磁同步电机(MVFAFPMSM)采用单定子/双转子结构,也称为TOURS结构,能有效抑制轴向电机单边磁拉力现象,电机整体如图1所示。环形定子铁心采用无槽结构,能有效抑制齿槽效应,减小电机振动和噪声,使电机平稳运行;电枢绕组以环形结构形式缠绕于定子铁心上,此方式可使绕组端部较短,有利于电机整体的紧凑性,抑制端部效应,提高电机的工作效率;永磁体呈矩形,周向表贴在转子盘上,相邻永磁体极性以N-S-N交错排列,两转子对称分布在定子两侧。机械调磁装置在一侧转子盘上,主要由机械调磁块、弹簧、推杆及轮毂组成。此侧转子盘通过轴承与电机转轴装配,可绕机轴自由转动,转子盘刚性连接有推杆,轮毂同轴固定于电机转轴上。双机械调磁块可抵消运行时对电机的离心力,提高调磁装置的运行可靠性,确保电机的稳定运行。

图1 电机结构图
1.2 电机工作原理
电机机械调磁装置具体如图2所示。位于轮毂上的两个机械调磁块在离心力与弹簧的拉力的共同作用下向外移动,当调磁块到达B点位置后,推动推杆,促使与推杆刚性连接的同侧转子盘在圆周方向旋转一定角度α,从而改变两转子在空间上的相对位置。当两转子的相对位置改变时,在电枢绕组中的磁通相应变化,实现弱磁的效果。两转子之间错开的角度α是电机本体与调磁装置间的调节变量,是机械调磁装置的重要输出参数。根据电机机械调磁块的特性,可把电机的运行状况分为以下两个阶段:基本工作状态和弱磁状态。

图2 机械调磁装置示意图
(1) 基本工作状态:当电机未运行时,推杆位于A点位置;在基速以下时,推杆位置在A点与B点之间;基速时,恰好在B点位置。此状况下,机械调磁块虽有运动,但未起到调磁的效果,故而称为基本工作状态。此时,电机相当于一台普通双转子单定子轴向电机。
根据电磁感应定律,电枢绕组线圈两侧有效导体切割磁感线,产生大小和方向均相同的感应电动势E,且在一个电周期内正反交替有规律变化,呈正弦分布[5]。此时每个线圈端部的感应电动势e可表示:
e=2NE=2NBglvc
(1)
式中:N为线圈匝数,Bg为轴向气隙磁密,l为有效导体的实际长度,vc为有效导体的平均圆周线速度,可由下式计算得到:
(2)
式中:ω为电机旋转角速度,Rin为电机定子内半径。综合式(1)和式(2),可得:
(3)
(2)弱磁状态:此时,推杆位于B点与C点之间,该侧转子盘产生了圆周运动,两转子盘间错开了一定角度α,不同的转速,调磁块在不同的位置达到平衡,推杆也位于不同的位置,从而错开的角度也随之变化。机械角度的错开使两侧永磁磁动势之间存在一定的相位差 ,其与机械角度的关系如下:
αe=p·α
(4)
式中:p为电机极对数。电机两侧永磁体对称分布,故两侧轴向气隙磁密Bg大小相等,但在弱磁状态下气隙磁密在空间上存在相应的相位差,且与两侧永磁磁动势间的相位差相同。因此,两侧有效导体两端将感应出大小相等,相差αe电角度的电动势E,如图3所示。此时,每个线圈端部的感应电动势e′可表示:
(5)

图3 绕组感应电动势矢量图
根据电机学原理[6],电机在工作状态下电枢绕组的感应电动势不可能为0,结合图3所示,可知线圈两侧感应电动势间的电角度 只能在区间(0°,180°)内变化,即两转子间可错开的机械角度α的变化区间为(0°,22.5°)。综上所述,MVFAFPMSM每相电枢绕组的感应电动势表达式如下所示:
(6)
式中:mc为电机每相绕组的串联线圈数;ω0为电机的基速(为1 800 r/min,即ω0=60 π)。由式(6)可知,转子间错开角度α是电机实现机、电、磁三者耦合的关键参数。若电机的机械调磁装置设计合理,在基速以上保持ωcos(pα/2)的值恒定, MVFAFPMSM即能实现弱磁控制,也可在宽转速范围内实现恒压输出和恒功率运行。
2 ADAMS/View建模与仿真
2.1 建立模型
虚拟样机技术通过CAD/CAM/CAE等技术手段把产品资料集成到一个可视化环境中,实现产品的仿真、分析。MD ADAMS软件由于其自身先进的技术和理念,被广泛应用于航空航天、汽车工程、铁路车辆及装备、工业机械、工程机械等领域[7]。本文所述的机械变磁通轴向磁场电机由于其自身的特点,需建立机械方面的结构模型并进行仿真分析,验证机械调磁的可行性。
为提高机械建模的精确性,采用Solidworks软件建立机械调磁模块的物理三维模型,通过生成x_t接口文件,在ADAMS/View中建立机械模型。根据仿真需要,在生成的机械模型各构件间添加约束关系,定义构件之间的运动方式及连接方式。现机械模型如图4所示。

图4 ADAMS机械模型图
整个模型由一侧转子盘、轮毂、两个推杆、两个机械调磁块及两个弹簧组成。由于对电机机械调磁结构仿真时不考虑电机本体,故而图中未计及电机本体模型。
2.2 模型验证性仿真
在建立模型后,为验证模型的可行性,给模型设定不同转速,输出所需变量的参数。由于轮毂固定在转轴上,因此轮毂与同侧转子盘错开角度即为两转子间错开角度。仿真模型中所用弹簧为线性弹簧,此类弹簧弹力系数与阻尼系数恒定,弹簧弹力越大形变量也越大。现两个重要参数为弹簧形变长度及转子盘与轮毂错开角度。电机空载情况下不同转速时弹簧形变长度的变化曲线如图5所示。

图5 不同转速时弹簧形变长度
由图5可知,当对电机突加转速进行仿真时,调磁块有一定的惯性,使弹簧形变长度有一定的波动;当电机运行平稳时,弹簧形变长度趋于稳定,波动很小;在不同的转速情况下,转速越高,弹簧形变长度越长,两者呈非线性地增加。
当电机运动时,轮毂以电机同步转速进行旋转,此时,轮毂上的两个机械调磁块在自身离心力、摩擦力、推杆反作用力及弹簧拉力的作用下离开原位置,在新的位置达到平衡。此状况下,弹簧拉伸形变,机械调磁块推动连杆运动,使两转子间错开一定角度。电机空载情况下转子与轮毂错开角度的变化曲线如图6所示。
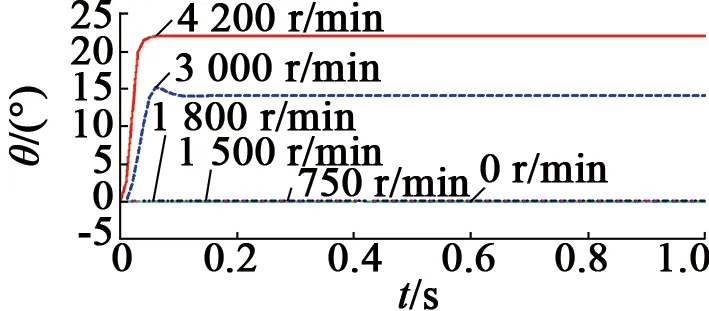
图6 错开角度
由图6可知,由于调磁块的形状特殊,电机在10 800 (°)/s(即基速1 800 r/min)以下时,调磁块虽然作了径向运动,但未起到调磁的作用,故而转子与轮毂未错开角度;随着转速的不断升高,两者错开角度越大,当转速为18 000 (°)/s(即3 000 r/min)时,错开角度达到14°,理论上最大可达到22.5°。
仿真结果表明,利用所设计的机械调磁装置,能实现两转子间错开角度随转速的变化而相应变化,可调节的角度范围较宽。
3 联合仿真实验
3.1 Simulink模型建立
文章中永磁电机是以空间电压矢量控制SVPWM技术为基础[8],在MATLAB/Simulink中建立联合仿真模型,分析其性能。因此电机为调磁电机,而Simulink系统库中的PMSM模块存在参数不可动态修改,无法直接进行仿真使用,需对其做改进,预留机械调磁输入端口[9]。此电机是在调节两转子间错开角度,影响定子磁链,进而影响反电势,故而需对磁链端添加输入端口,使其能随两转子错开角度的变化而变化。
图7给出了引入角度输入端口前后的PMSM封装对比。从图中可知,相对于修改前的模型,修改后的模型增加了一个角度输入端口theta1,其他部分不变。通过角度theta1端口,输入不同的角度值,可实现反电势峰值的变化,达到本实验的目的。

图7
MATLAB/Simulink中永磁同步电机控制系统采用的是空间电压矢量控制SVPWM技术,控制系统流程为:利用转速闭环,使给定转速与反馈转速比较,通过PI调节器得到q轴电流,由控制算法得到d轴与q轴的电流给定值。d,q轴电流给定值分别与反馈值进行比较,经过解耦电流控制器,得到d,q轴电压分量,进行反Park变化后得到其α,β轴分量,经SVPWM调制方式,实现对逆变器控制,从而实现对永磁电机的闭环控制。
3.2 联合仿真模型建立
在ADAMS中定义电机机械调磁模型相应的输入、输出变量,将转子转速定义为输入变量(即从Simulink中输入电机转速),将轮毂与同侧转子盘错开的角度为输出变量(即角度值输入到电机模型中)。在ADAMS中通过选定相应的解算器,加载ADAMS/controls模块,导出MATLAB可识别的ADAMS模型。在MATLAB中通过命令语句,生成ADAMS模块,并与电机空间电压矢量控制系统相连接,进行联合仿真。联合仿真模型如图8示。

图8 联合仿真模型
3.3 联合仿真及结果分析
联合仿真平台搭建完后,修改不同的控制参数,进行仿真。现对1 800 r/min及3 000 r/min两个典型转速情况分别进行仿真分析。图9、图10分别给出了1 800 r/min,3 000 r/min时错开角度及反电势波形图。

图9 1 800 r/min反电势波形及错开角度
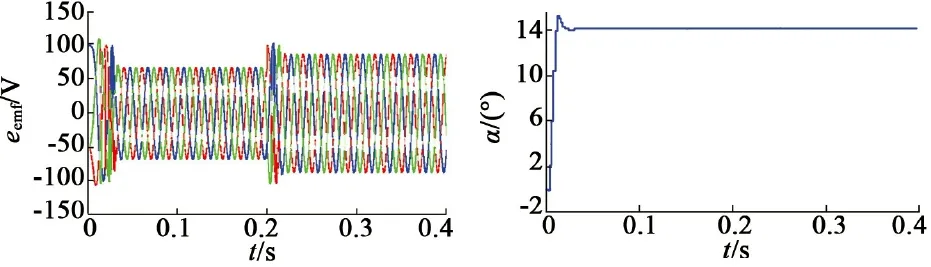
图10 3 000 r/min反电势波形及错开角度
从图9、图10中可知,在不同的转速下,ADAMS模块能很好的对输入量作出相应响应,并反馈给电机本体模型,从而影响电机反电势。由于技术的限制,ADAMS模型的输出量与ADAMS/View中的仿真数据仍有一定的差距,但基本符合试验要求。
4 结 语
本文从介绍MVFAFPMSM基本结构及工作原理开始,建立了电机机械调磁装置的动力学模型,阐述了电机本体与机械调磁装置联合仿真的实现方法。通过仿真实验,可得出以下结论:
(1)电机空载运行时,机械调磁块能良好地工作。在3 000 r/min时,两转子间错开角度能达到14°,角度调节能力较强,能较好的满足设计需要,在恒压发电及恒功率宽转速范围驱动领域具有广阔的应用前景。
(2)导入至MATLAB中的机械动力学模型能够正常的运行,联合仿真时能较好的符合预期设想,从而验证联合仿真的可行性。
(3)联合仿真的实现,验证了机械调磁装置的可行性,缩短了开发周期,为下一步电机样机的试制提供了依据。
[1] 马晓敏.中国能源消费结构演进特征[J].中国能源,2008,30(10):23-27.
[2] CAO W P,MECRO B C,ATKINSON G J,et al.Overview of electric motor technologies used for more electric aircraft (MEA)[J].IEEE Transactions on Industrial Electronics,2012,59(9):3523-3531.
[3] EL-REFAIE A M.Motors/generators for traction/propulsion applications[C]//International Conference on Electric Machines & Drives(IEMDC).IEEE,2011:490-497.
[4] ZHU Z Q.永磁电机研究的新进展[J].电工技术学报,2012,27(3):1-11.
[5] 刘细平,林鹤云,杨成峰.新型双定子混合励磁风力发电机三维有限元分析及实验研究.中国电机工程学报[J].2008,28(20):142-146.[6] 汤蕴璆,史乃.电机学[M].北京:机械工业出版社,2011.
[7] 贾长治,殷军辉,薛文星,等.MD ADAMS虚拟样机从入门到精通[M].北京:机械工业出版社,2010.
[8] 王艾萌.新能源汽车新型电机的设计及弱磁控制[M].北京:机械工业出版社,2014.
[9] 王莉娜,杨宗军.Simulink中PMSM模型的改进及在参数辨识中的应用[J].电机与控制学报,2012,16(7):77-82.
Co-Simulation of a Novel Mechanical Variable Flux Axial Field Permanent Magnet Synchronous Machine
LIUXi-ping,XIEQing-hua,XUChen,ZHONGQing-wei
(Jiangxi University of Science and Technology,Ganzhou 341000,China)
The present situation of the motor simulation study was introduced. For inadequate of traditional mechanically flux-weaking motor only focus on mechanical or electromagnetic properties, a new approach to achieve simulation reasonable between mechanical and electromagnetic properties by co-simulation were proposed.Then the principles and methods to achieve co-simulation of electromechanical were described in detail.In the research object of mechanical variable flux axial field permanent magnet synchronous machine, co-simulaion through the establishment of the mechanical adjustment of magnetic device model in ADAMS/View and establish mechanical control system model. Simulation results verify the correctness of co-simulation, providing a new way for future research and development of mechanical and electrical combined control.
co-simulation; mechanically flux-weaking; permanent magnet synchronous machine
邓先明(1970-),男,博士,教授,研究方向为新型电机设计与电力传动。
2015-11-02
国家自然科学基金项目(51267006);江西省自然科学基金项目(20153BCB23012,20151BBE50109);江西省研究生创新专项资金项目(YC2014-S366)
TM341;TM351
A
1004-7018(2016)12-0011-04
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19 08:51:52
防爆电机(2020年6期)2020-12-14 07:16:54
新高考·高一物理(2016年10期)2017-07-07 12:17:11
光学精密工程(2016年3期)2016-11-07 09:03:49
文学少年(有声彩绘)(2016年11期)2016-02-28 17:52:30
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
中学生数理化·高一版(2008年12期)2008-06-15 01:31:22
