基于空间电压矢量的全控开关软起动方法研究
2016-02-24 03:29王晓琴祝西亚马汇海孟彦京
微特电机 2016年12期
王晓琴,祝西亚,马汇海,陈 君,孟彦京
(陕西科技大学,西安 710021)
基于空间电压矢量的全控开关软起动方法研究
王晓琴,祝西亚,马汇海,陈 君,孟彦京
(陕西科技大学,西安 710021)
提出了一种基于全控器件的十二边形空间电压矢量软起动方法。将空间电压矢量的非零向量两两结合构成新的6个非零向量,再与原非零向量一起组成正十二边形空间电压矢量,采用交交变频的方法把工频进行13分频、7分频、4分频、1分频,利用Park变换,在这3个频率周期内依次进行正十二边形空间电压矢量起动,之后再通过调压的方法切换到工频。电路开关器件采用IGBT,因此可以实现有效的控制,并利用MATLAB软件搭建仿真电路对此方法进行了验证,计算机仿真证明了这种方法的可行性和有效性,性能参数较六边形法具有一定的提高。
空间电压矢量;软起动;十二边形
0 引 言
交流异步电机在直接起动过程中具有电流大转矩小的缺点,对电机自身和电网有不利影响[1]。近年来随着电力电子器件的快速发展,软起动成为研究热点。本课题组在六边形空间电压矢量[3]软起动方面做了大量的研究并取得了一定的研究成果[2]。本文所讨论的起动方案是在六边形空间电压矢量的基础上提出来的一种新型的十二边形空间电压矢量起动方法。较之六边形空间电压矢量,该方法所产生的磁链更接近于圆形,因为矢量切换的角度变化小,所以与六边形相比,磁链所产生的转矩脉动更小,更利于异步电机平稳起动。该方案通过控制主电路中IGBT的通断时间实现调节电源电压,同时调节电源频率,维持电源电压与频率的恒定,进而实现分级变频到工频的变换。由于IGBT是全控型器件,因此电路通断皆可控,使得矢量的产生更精准。
1 系统整体设计方案
正十二边形主电路是由3个IGBT和12个二极管构成双向桥式电路。控制电路由STM32单片机和FPGA进行控制[4-5],同时还有一些检测电路和驱动电路,逻辑功能图如图1所示。通过控制IGBT导通和关断的时间来控制空间电压矢量的大小。当电压检测电路检测出相电压过零时,向主控电路发出信号,然后由主控电路控制驱动电路,使主电路相应相的IGBT导通,经过一定的角度后再关断该相IGBT。
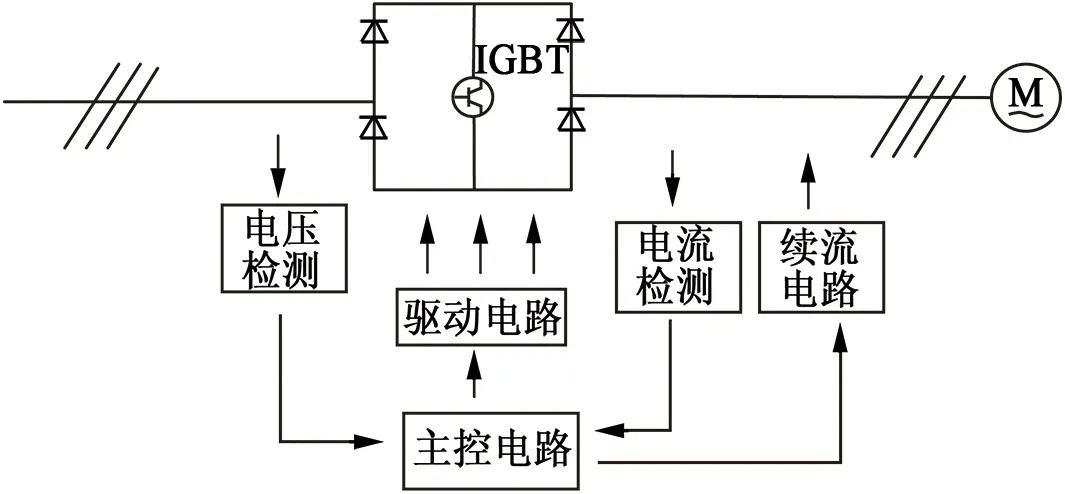
图1 逻辑功能图
2 十二边形起动方案
2.1 十二边形空间电压矢量的合成
十二边形的空间电压矢量是通过六边形空间合成得到[4]如图2所示。
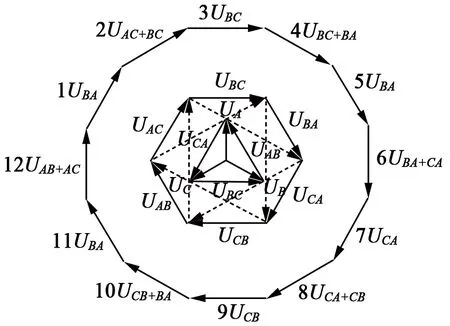
图2 十二边形空间电压矢量
图2中的最内层的图形是三相相电压和三相线电压,中间层的图形是正六边形基础空间电压矢量。最外层是由中间层两两组合得到的正十二边形空间电压矢量。空间电压矢量与三相电压的关系式可以由Park变换得到:
(1)
式中:us为空间电压矢量,2/3为变换系数,uA0,uB0,uC0分别为三相相电压,均采用余弦表示,即:
(2)
2.2 分频系数的选取和导通角的选取
在三相交流电中有正负相序和零相序,正相序使电机正转,负相序使电机反转,零相序对电机的转向无影响[6],因此为了使电机正转就需要选取正相序电。三相电经过分频后依然存在正负零序。下面对分频后形成不同的相序过程进行分析。假设三相电的角频率为ω0,分频后的角频率为ω1,分频系数为n,那么三者满足关系式:
ω0=nω1
(3)
(4)
分频后负相序的分频系数满足:
(5)
所以正相序的分频系数:
n=3m+1,m=0,1,2,…
(6)
负相序的分频系数:
n=3m-1,m=1,2,3,…
(7)
为了使电机正转,研究过程中舍弃了负相序和不对称相序状态,仅在正相序中进行研究;同时,为缩短起动时间,选择对4,7,10,13分频进行研究。忽略磁链的衰减以及零电压矢量对磁链的影响,由各个分频的导通波形发现,十二边形空间电压矢量仅能在4分频、7分频和13分频完整导通,所以本设计选取的频率分级点为13→7→4→1,即先进行13分频起动,然后切换到7分频,之后再切换到4分频,最后进入正常工频工作状态。
接下来分析13分频和7分频的导通角的选取。异步电机的转矩表达式[7]:
(8)
由三相电机的感应电动势和转矩公式可知为了保证在起动过程中保持转矩恒定,需要保证定子电压和频率之比恒定[8]。工频下的压频比:
(9)
在高频率下可以忽略定子漏阻抗带来的压降,但是在低频率阶段就不能忽略定子漏阻抗的电压,需要适当提高电压[6]。则13分频和7分频对应的电压可选为:
U13≈35 V
U7≈65 V
U4≈95 V
它们的有效值应为:
根据控制的IGBT的情况,三相电源只能工作在两相导通、三相导通和三相均不导通的状态。本文仅举出其中几个空间电压矢量进行推导算出导通角,其余的与此类似。当两相导通时,电机内部只有两相构成回路,因此满足:
(10)
(11)
当三相导通时满足:
(12)

126 V
(13)
同理当三相导通时:
126 V
(14)
3 分频起动方案
3.1 13分频起动过程
系统对工频50Hz进行13分频后,十二边形导通原理如图3所示。
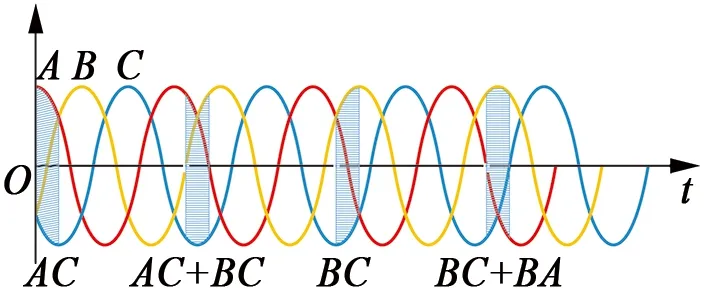
图3 13分频时的三相电源导通状态
由于篇幅所限,该图只画出了十二边形空间电压矢量的1/3的电压矢量。采用13分频后,走完一个十二边形空间电压矢量相当于用了13个工频周期,对应的每个扇区相当于走了13/12个工频周期。主电路的驱动开关采用IGBT,所以器件的导通和关断是可控的,下面以13/12工频周期为单位进行分析。如图3所示在第一个13/12工频周期开始导通A相和C相,此时,根据电压波形可知形成的电压为UAC,导通1/6个工频周期后关断A相和C相,之后运行的是零矢量电压;到第二个13/12工频周期开始时同时触发A,B,C三相的IGBT,此时,根据三相电压的波形可知形成的空间电压矢量是 ,导通1/6个工频周期后关断三相IGBT,接着运行得是零矢量电压,依此类推接下来依次触发:
UBC→UBC+BA→UBA→UBA+CA→UCA→
UCA+CB→UCB→UCB+AB→UAB→UAB+AC
在每一段13/12个工频周期触发一个电压矢量,每一段电压矢量导通1/6个工频周期,运行完一组12个空间电压矢量需要13个工频周期。
3.2 13分频的磁链
第一阶段:UAC导通,满足关系式:
(15)
uB0开路,由(1)式可得:
(16)
忽略定子电阻压降,假设定子磁链的初始值为ψ0,可得电机气隙磁场经过第一阶段后的磁链[2]:
(17)
第二阶段:UAC+BC导通,满足关系式:
(18)
由式(1)可得:
α2cos (ωt+120°)]=
Um(cosωt+jsinωt)=Umejωt
(19)
同理,忽略定子电阻压降,第二阶段过后的磁链:
(20)
以此类推,发现三相导通时形成空间电压矢量均是u=Umejωt,两相导通时的空间电压矢量仅有3种分别是:
uAB=uBA=uA0+αuB0=
(21)
uAC=uCA=uA0+αuB0=
(22)
(23)
得出每个阶段所产生磁链:
,...12
(24)
3.2 7分频的起动过程

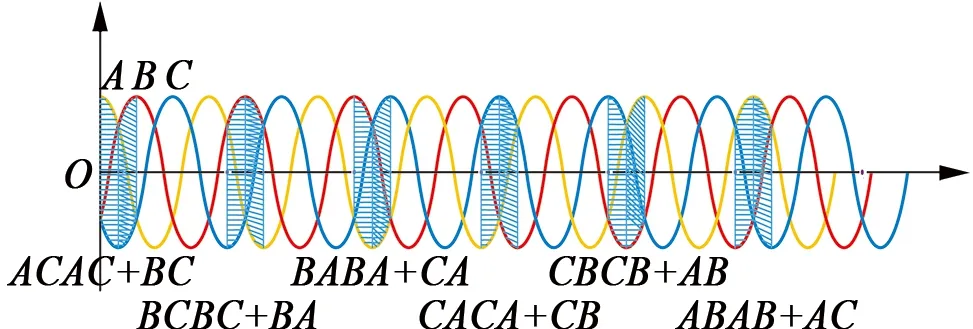
图4 7分频时的三相电源导通状态
第一阶段:UAC,UAC+BC依次导通,同理依次满足以下关系式:
(25)
(26)
由式(1)可知两个空间电压矢量的表达式:
(27)
α2cos (ωt+120°)]=
Um(cosωt+jsinωt)=Umejωt
(28)
忽略电机定子阻抗压降后产生磁链:
(29)
(30)
第二阶段:依次导通UBC,UBC+BA它们的空间电压矢量依然是us3,us4产生磁链:
(31)
(32)
第三阶段:依次导通UBA,UBA+CA它们的空间电压矢量依次是us5,us6产生磁链是:
(33)
(34)
7分频导通的电压依然是两相或是三相,所以形成空间电压矢量和13分频的一样,所形成磁链是:
,...,11
(35)

(36)
对于4分频这里不做详细推导,同样采取波形分析法。4分频的导通过程与7分频类似,只是采用4段矢量连续导通。之后经过调压切换到工频。
4 仿真实验结果分析
通过Simulink仿真软件建立仿真电路[9-10]如图5所示,电源参数设置采用三相电源,幅值为311V,相位相差120°,频率为50Hz。异步电机参数的设置额定功率是2.2kW,线电压是380V,频率是50Hz,定子阻抗是2.3Ω,漏感是0.014 16H,转子阻抗是2.33Ω,漏感是0.014 16H,互感是0.248 7H,转动惯量是0.068 1kg·m2,极对数是2。
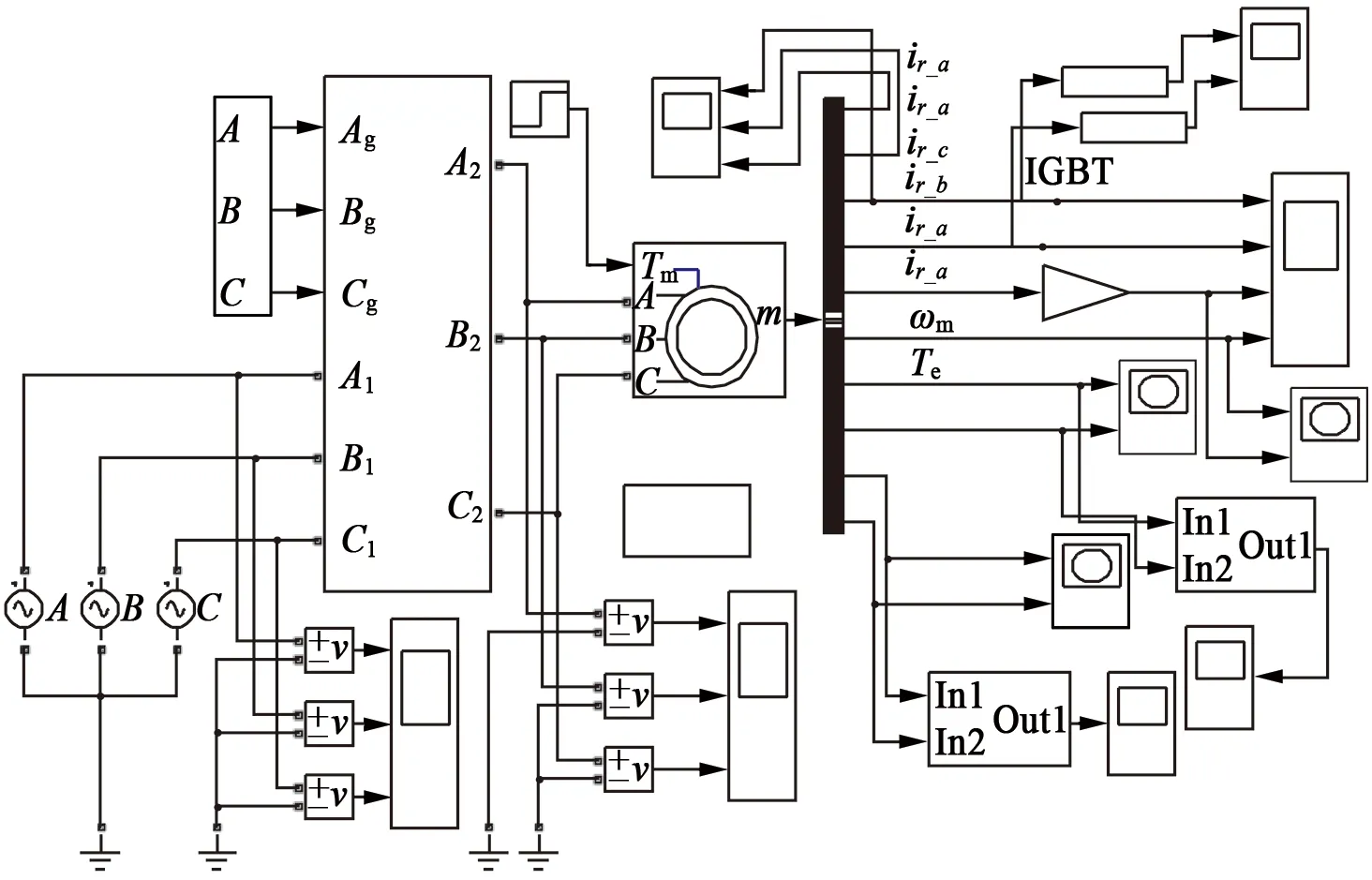
图5 十二边形空间电压矢量仿真电路
对比图6(a)与图7(a)和图6(b)与图7(b)的图形可以看出,六边形空间电压矢量的软起动过程中的定子磁链与转子磁链都很接近于圆形(由于图片原因这里显示成椭圆),起动过程初期磁链变化不规则,波动较为明显,会引起电动机的颤动。而十二边形法起动初期的磁链波动明显减小,不仅可以减轻颤动,而且损失的电能较小,同时磁链更接近圆形,起动过程将更加平稳顺滑。对比图8(a)和8(b)可以发现十二边形法比六边形法的起动转速略低,导致耗时多0.1s,但由此得到了平稳得多的起动过程,因此这点时间上的付出具有极高的性价比。从图中还可以看出两者的A相定子电流波动幅度相当,但是六边形空间电压矢量的波动频率较高。
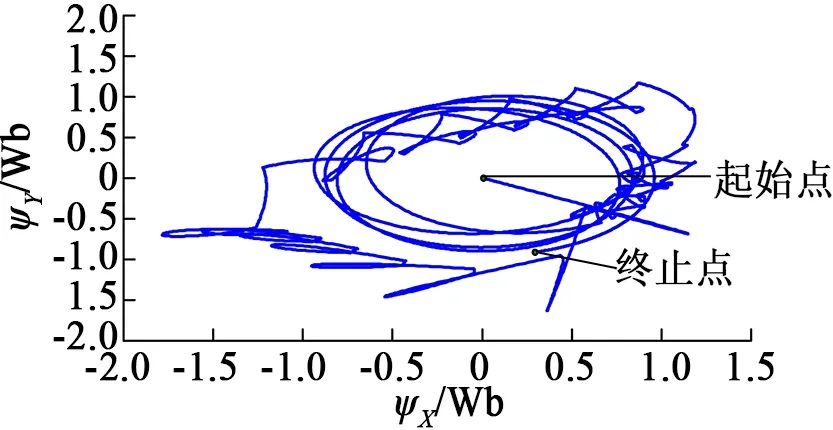
(a) 定子磁链
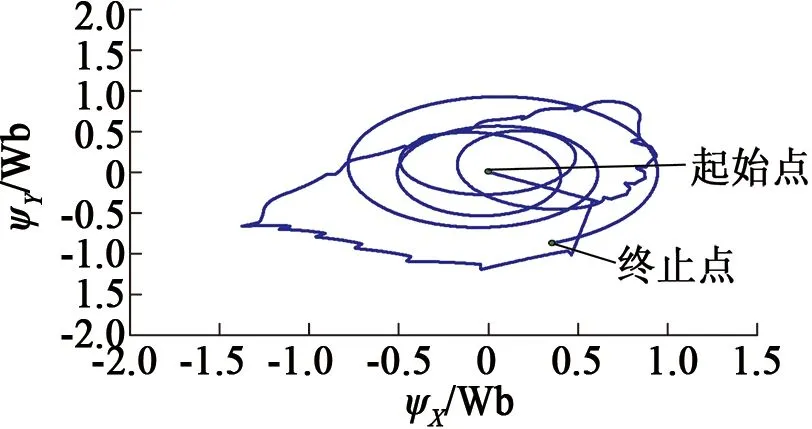
(b) 转子磁链
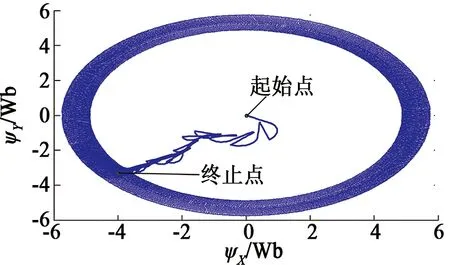
(a) 定子磁链
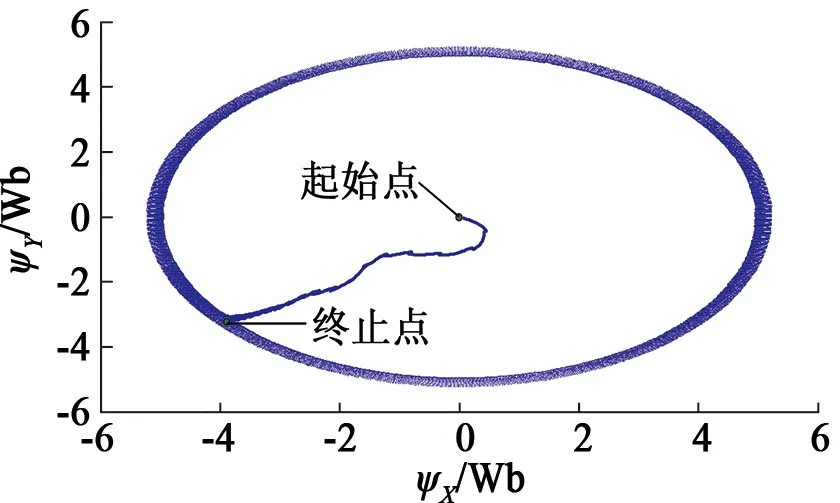
(b) 转子磁链
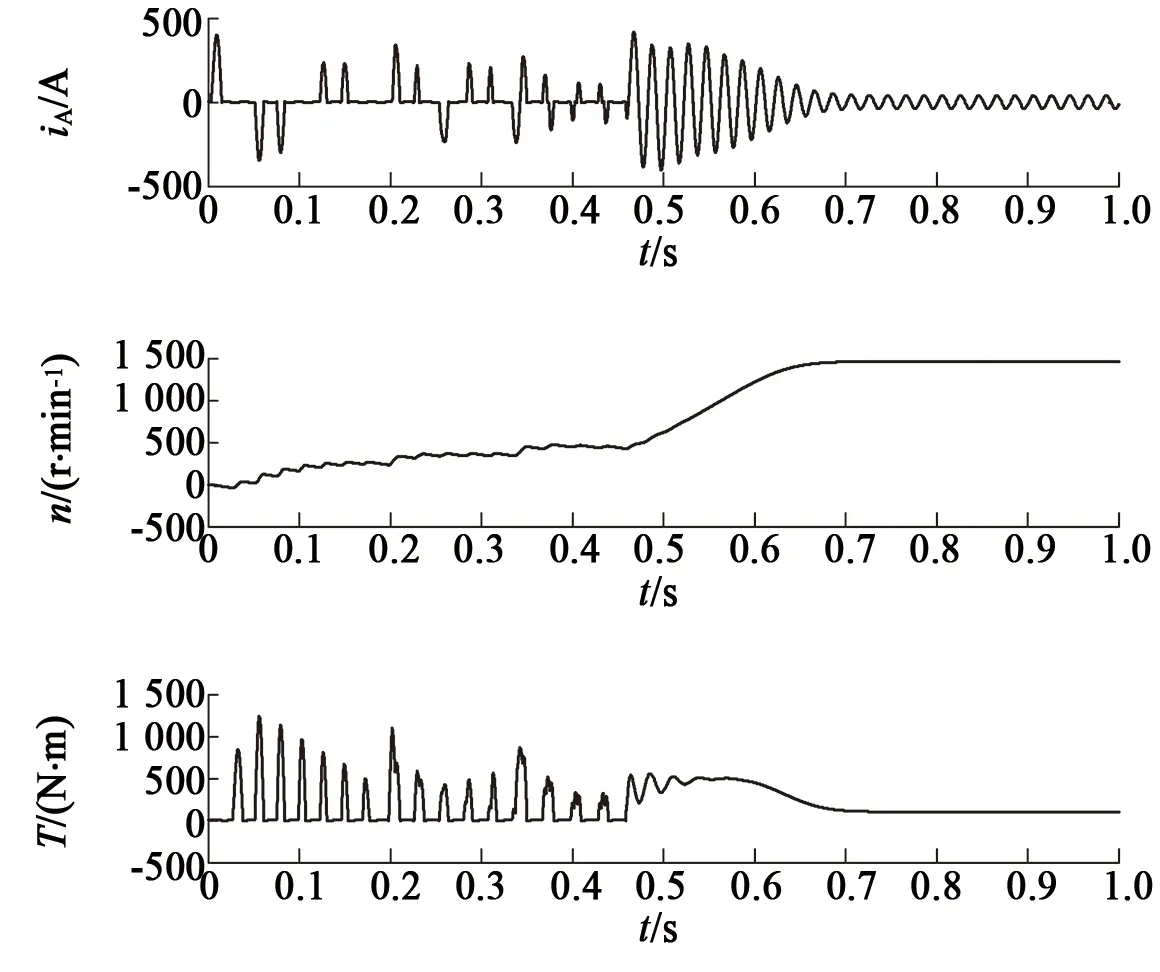
(a) 六边形电压矢量仿真
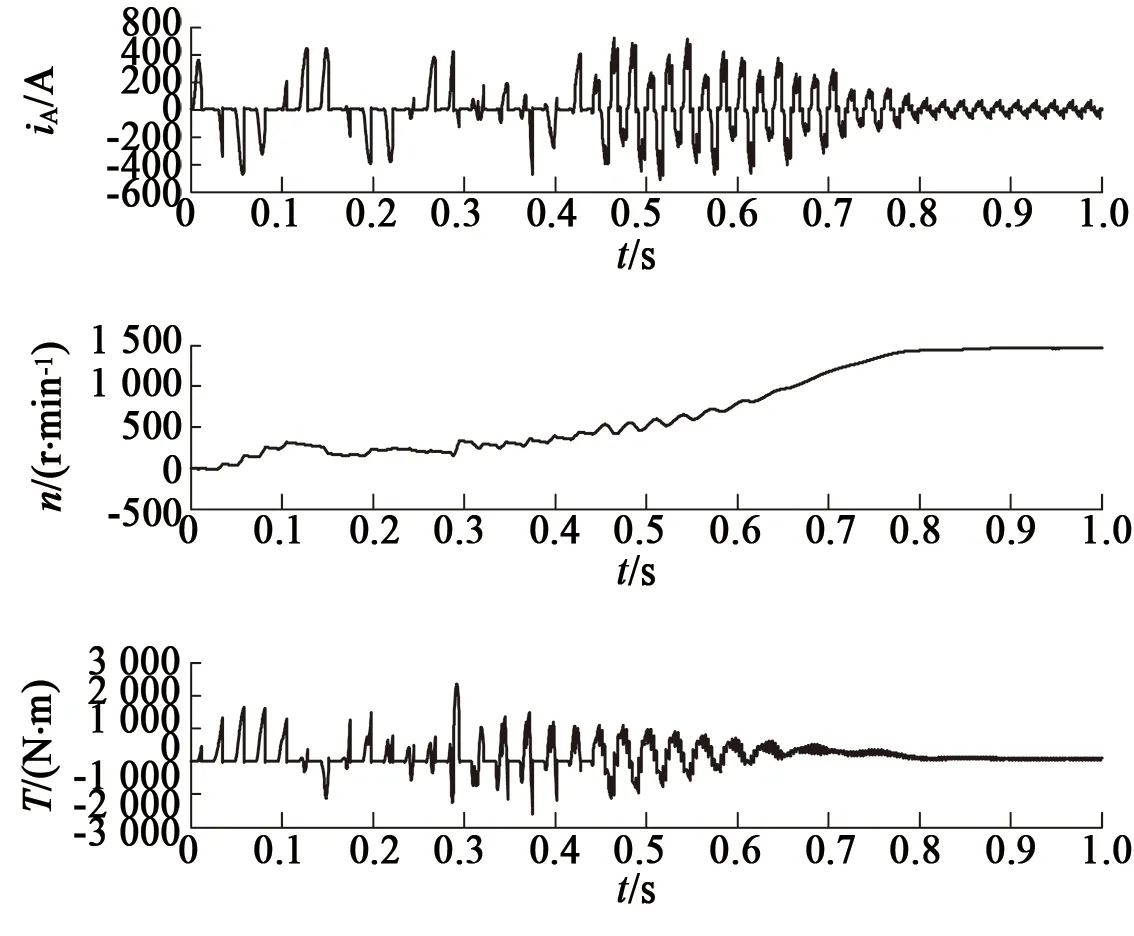
(b) 十二边形电压矢量仿真
通过六边形仿真模型中定子电流有效值的计算得出,六边形空间电压矢量起动过程中定子电流的有效值一般维持在200A左右,最高甚至超过300A,十二边形起动过程中定子和转子的电流有效值最大不超过200A,基本维持在180A左右。
5 结 语
本文讨论了一种利用分级变频思路和IGBT器件实现十二边形空间电压矢量的方法,这种方法可以有效地使用在电动机的软起动过程中,从而进一步缩短电动机的软起动时间、提高电动机软起动过程中的平滑性。仿真结果表明,这种方法具有良好的起动性能,效果非常明显,具有一定的实用价值;但仿真结果也表明起动过程中的转矩仍存在一些波动,需要在今后的工作中进一步研究。
[1]GRITTERD,WANGD,HABETLERTG.Softstarterinsidedeltamotormodelinganditscontrol[C]//IndustryApplicationsConference.IEEE,2000:1137-1141.
[2] 孟彦京,张陈斌,陈君,等.一种基于正弦波电压空间矢量的新型软起动器[J].电工技术报,2014,48(7):28-35.
[3] 洪乃刚.电力电子技术基础[M].北京:清华大学出版社,2008.
[4] 谢晨.异步电机软起动器电压空间矢量控制技术的研究[D].西安:陕西科技大学,2015.
[5] 孟彦京,杨波.一种基于STM32与CPLD的软启动设计[J].工矿自动化,2013,39(4):31-35.
[6] 阎超.分级变频调压软起动器的设计与仿真研究[D].北京:华北电力大学,2008.
[7] 阎治安,崔新艺,苏少平.电机学[M].西安:西安交通大学出版社,2006.
[8] 兰志杰.基于分级变频的重载软起动系统 [D].株洲:湖南工业大学,2006.
[9] 王晶,翁国庆,张有兵.电力系统MATLAB/Simulink仿真与应用[M]. 西安:西安电子科技大学,2008.
[10] 林飞,杜欣.电力电子应用技术的MATLAB仿真[M].北京:中国电力出版社,2008.
Study Of Soft Start Based On Space Voltage Vector For Full Controlled Device
WANGXiao-Qin,ZHUXi-Ya,MAHui-hai,CHENJun,MENGYan-Jing
(Shaanxi University of Science & Technology,Xi′an 710021,China)
The paper puts forward a method of dodecagon space voltage vector soft starting based on full controlled device. The nonzeros vectors of space voltage vector, and together with the original nonzero vector constitute to a dodecagon space voltage vector. It used the method of AC frequency conversion to change the power frequency into 13 points, 7 points and 4 points frequency. By using the Park transform, the dodecagon space voltage vector was started orderly in the three frequency period. Then it switched to power frequency through the method of voltage regulation. Circuit switch devices adopt IGBT, so it can achieve effective control. Dodecagon is more close to circle than hexagon, so the method of dodecagon space voltage soft starting can starts asynchronous motor more stable than the method of hexagon space voltage vector soft starting in theory. Finally, the feasibility of this method was verified by MATLAB simulation circuit and got the more improvements than hexagon space voltage vector.
space voltage vector; soft start; dodecagon
2016-06-07
国家自然科学基金项目(51577110)
高俊(1984-),男,硕士,工程师,研究方向为永磁电机设计及其结构工艺。
TM343
A
1004-7018(2016)12-0028-05
猜你喜欢
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
小哥白尼(趣味科学)(2021年6期)2021-11-02
深圳职业技术学院学报(2020年3期)2020-06-19
童话世界(2018年32期)2018-12-03
凿岩机械气动工具(2017年3期)2017-11-22
学生导报·高中版(2017年23期)2017-09-10
学生导报·初中版(2017年23期)2017-09-10
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12