直升机武器系统校靶技术研究
2016-02-23 04:59汪智超黄福贵
直升机技术 2016年3期
汪智超,黄福贵
(海军驻景德镇地区航空军事代表室,江西 景德镇 3330002)
直升机武器系统校靶技术研究
汪智超,黄福贵
(海军驻景德镇地区航空军事代表室,江西 景德镇 3330002)
结合国内外校靶工作发展的基本情况,主要对AH-64所采用的“先进校靶设备系统”进行分析,并提出改进措施,然后根据武装直升机作战运用的特点,针对活动航炮、武器随动挂架系统提出了以视频处理、叠加技术为基础的快速校靶方案,使武装直升机航炮等武器能够实现快速、简易校靶,能够有效提升武器系统的作战能力。
直升机;校靶;惯性平台
0 引言
校靶是使武器系统各装置的光、电、机械轴线与基准坐标轴线协调一致的所有校准、调整操作的总称,是一项经常性的、直接关系到机载武器保障性、命中概率及整个武器系统任务效率的重要工作[1]。1989年美国批准“先进校靶设备系统”计划立项,项目由美陆航负责,陆海空三军参与。从1989开始,经过数十年的不断改进,美国的先进校靶设备系统(ABE)已经日趋完善,广泛应用于美军及其他各国军队使用的AH-64武装直升机。
1 校靶技术发展简介[1]
自机载武器诞生以来,校靶就成为一项关系到机载武器命中概率的重要工作,校靶技术也从实弹校靶、仪器校靶(靶板法)发展到了自身校靶。
靶板法是用校靶镜十字中心在靶图上的投影点代替实弹射击在靶图上的平均弹着点来对武器系统进行校准的校靶方法。在各方面要求不苛刻的情况下,是一种比较成熟、可行的办法,但存在需要将载机顶水平、远距离立靶板、校靶时间长等局限性。
自身校靶是指载机以任意姿态停放后,借助载机及校靶装置上的光、机、电等设备来测量并调节各校准线间的空间位置关系的一种校靶方法。与仪器校靶相比,自身校靶不需要将载机顶水平,不需要在距载机50m外立靶板,对场地的要求较低,相对来说也要省时、省力得多。特别是对于海军舰载机,由于其特殊的场地、环境要求,自身校靶比其他校靶方法更具优势。
目前,国内直升机校靶方法均为仪器校靶(靶板法),已经不适应现代科学技术及装备的发展需要,特别是已经不能满足现代化战争部队的作战模式和战术运用的需要。
随着人们对校靶地越来越重视及校靶技术的发展,未来的校靶方法将越来越少地依赖机载设备以外的校靶装置,借助载机光、机、电等设备及少量的便携式校靶装置完成对机载武器系统的校准,甚至在载机飞行中,就可以完成武器系统的快速校准。
2 先进校靶设备系统(ABE)分析
根据各国具体的应用情况,目前应用比较广泛的自身校靶方法有两种:“靶板机身固定”法和“测角”法。
“靶板机身固定”法——校靶时将靶板框架通过过渡框架固定到载机上,由这些框架保证靶板与基准轴线间的空间对应关系。这种方法的实质与仪器校靶是一样的,相当于把靶板固定在载机上,其优点是载机可以不顶水平,校靶空间及场地要求少;缺点是在校靶距离缩短的情况下,为了保证校靶精度,需要提高对校靶仪器精度及校靶过程精度控制的要求。这种方法在我国固定翼飞机机载武器的校靶上使用比较普遍,AH-64武装直升机的机载武器早期也曾使用过。
“测角”法——主要是以载机各轴线在作战过程中应满足的空间关系为基础,然后借助光学测角设备来指导调校过程的校靶方法。这种方法的特点是在载机设计的过程中,也不需要过多的基准设备、机构或装置,校靶过程中使用的设备相当少,校靶过程中对场地的要求不十分严格,对野战条件的适应性好,并且对于一般现役的载机,只要载机自身条件具备,可进行改装,转而使用这种方法进行校靶。这与“靶板机身固定”法相比,不需要安装庞大的机身靶架,校靶工作的时间比较短,操作较为简单,但校靶工作对维护人员有较高的培训工作要求。美国的先进校靶设备系统(ABE)运用的就是“测角”法原理。
ABE系统使用了平行光自准测角、焦平面CCD成像及陀螺惯性平台技术,使其能够实现对飞行器(特别是舰载飞行器)进行全天候校靶,减少测角误差,操作比其他“测角”校靶方法更为简单、快捷、准确,其校靶精度可以达到0.1mrad。
ABE校靶系统实际上是一个测量待校靶设备轴线姿态角的角度测量系统,由于与载机没有控制信号交联,只要对载机进行有限的改装以便于安装各类校靶转接镜,便可以对不同机种、机型进行校靶。目前ABE系统已经成功应用于各类型飞行器。
2.1 先进校靶设备系统(ABE)组成
ABE系统由一个动态惯性测量装置、一个基准惯性测量装置、一个处理运算装置、一个基准框架、一个手持式显示控制器及一系列的校靶转接镜组成,如图1所示。

图1 ABE系统组成[2]
基准框架——与载机有精确的装配关系,能够为基准惯性测量装置提供与载机姿态一致的安装面。
校靶转接镜——与载机有精确的装配关系,为不方便直接校靶的武器/传感器提供转接。反射镜的镜面垂线可以准确反映待校靶武器/传感器的方位、俯仰角。(有些反射镜的镜面垂线与待校靶武器/传感器方位、俯仰成固定角度)。
手持式显示控制器——提供控制指令、参数和模型的输入,并显示测量结果。
基准惯性测量装置——安装在基准惯性测量装置安装框架上,通过内部的三轴陀螺传感器实时测量机体姿态角,建立校靶测量基准坐标系。该装置上有两块垂直分布的发射镜,用于基准惯性测量装置和动态惯性测量装置的对准(图2)。
动态惯性测量装置——可以发射平行光束,通过反射光束测量待校靶武器/传感器的方位、俯仰角。
运算处理装置——对基准惯性测量装置、动态惯性测量装置输出姿态角度和对动态惯性测量装置中发射光束及反射光束的成像视频数据进行处理;对动态惯性测量装置输出驱动角;可以为校靶系统提供电源。

图2 动态惯性测量装置、基准惯性测量装置外形图[2]
2.2 先进校靶设备系统原理分析
2.2.1 动态惯性测量装置的角度测量原理
动态惯性测量装置是一个手持的便携测量设备,主要由一个3轴稳定框架平台及安装在3轴稳定框架平台上的平行光管成像系统、框架驱动系统、三轴陀螺传感器组成。三轴陀螺传感器实时输出稳定框架平台的姿态角。平行光管成像系统主要由焦平面CCD相机、光源、十字分划板和凸透镜等其他光学镜片组成。如图3所示, CCD相机感光平面在凸透镜1倍焦距的焦平面上,十字分划板与CCD相机感光平面相对半反半透镜对称。点光源发射光线经平行光管成像系统内的半反半透镜反射,经凸透镜后汇聚成平行光,沿平行光管轴线发射出去,平行光束被校靶镜反射回来并透过凸透镜、半反半透镜成像于焦平面CCD相机上。

图3 动态惯性测量装置角度测量光路原理图[3]
由于涉及到方位、俯仰、横滚三个角度的测量,所以在坐标系(X,Y,Z)内,定义矢量M与XY平面夹角为其俯仰角,在XY平面上方为正;矢量M在XY平面内投影与X轴夹角为矢量M方位角,XZ平面右方为正;横滚角为XY平面绕X轴转动角度,顺时针为正,如图4所示。

图4 姿态角定义
在图4所示坐标系(X,Y,Z)内,三轴稳定平台方位、俯仰角即平行光管轴线方位、俯仰角α,β均为0(其中β为俯仰角);校靶镜M1镜面垂线的方位、俯仰角分别为α1,β1所以经校靶镜M1反射的反射光束与平行光管轴线俯仰方向夹角为2β1;反射光束在焦平面上成像点坐标为(y,z)。方位、俯仰角定义见图5。
由图4光路分析可得:
利用同样的原理,可以得到校靶镜M1镜面垂线方位角:
由于校靶镜M2与校靶镜M1成90°夹角,所以可以通过测量校靶镜M2的俯仰角获得待校靶设备的横滚角。
假定CCD相机像圆直径r为10μm,透镜焦距f为10cm,则角度测量精度:
2.2.2 ABE校靶系统校靶步骤、原理
使用ABE校靶系统对直升机进行校靶,特别是载机所处环境为动态环境时(舰载环境),首先需要完成基准惯性测量装置和动态惯性测量装置的对准,即动态惯性测量装置中惯性平台姿态与载机姿态的对准,以便获得相同的测量坐标系基准和减少陀螺零位漂移的影响。基准惯性测量装置和动态惯性测量装置的对准方法有两种:
1)将基准惯性测量装置和动态惯性测量装置平行放置在水平的基准面内进行对准。
2)将基准惯性测量装置通过基准框架安装在载机平台上,基准惯性测量装置上反射镜M1的镜面垂线可以提供方位、俯仰基准,M2的镜面垂线可以提供方位、横滚基准。如图5所示,手持动态惯性测量装置靠近基准惯性测量装置的反射镜,并通过平行光管成像系统测量当前平行光管轴线与反射镜发射光束的夹角,并驱动三轴惯性稳定平台转动直至该角度为0,完成动态惯性测量装置对于基准惯性测量装置的对准。
完成基准惯性测量装置和动态惯性测量装置的对准后,就可以进行基准惯性测量装置、动态惯性测量装置和运算处理装置的交联,并使动态惯性测量装置的惯性稳定平台姿态可以随动于载机姿态,使平行光管成像系统的输出光束轴线与机体纵轴线平行,获得相同的测量坐标系基准。

图5 动态惯性测量装置的对准
ABE校靶系统校靶原理框图见图6。机上待校靶设备可以分为三类:武器等非光学设备、红外、可见光传感器、激光测距设备。
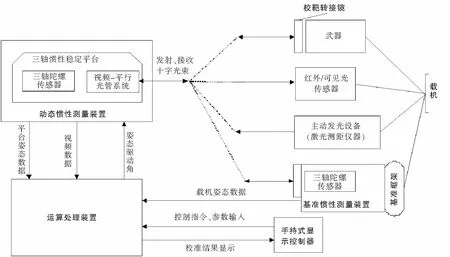
图6 ABE校靶系统原理框图[2]
武器等非光学设备必须通过校靶转接镜进行校准,如图7所示,对机载活动航炮系统进行校靶需进行以下步骤:
1)完成基准惯性测量装置和动态惯性测量装置三轴陀螺的对准,即动态惯性测量装置中惯性平台姿态与载机姿态的对准。
2)安装活动航炮的校靶转接镜,校靶转接镜镜面垂线与活动航炮炮管轴线平行。
3)手持动态惯性测量装置靠近航炮校靶转接镜,并将其平行光管成像系统镜头对准校靶转接镜镜面;按压动态惯性测量装置或手持式显示控制器上的“启动”按钮,平行光管成像系统发射平行光束,动态惯性测量装置中的三轴惯性平台以当前发射光束轴线(即机体纵轴线)为中心做螺旋形转动,搜索经校靶镜反射回来的光束。捕获反射光束,就可解出目前航炮校靶镜镜面垂线的方位、俯仰角。将航炮校靶镜方位、俯仰角与机体纵轴线方位、俯仰角比较,得出校正角度,航炮根据校正角度进行校正,校正后可再重复测量航炮校靶镜镜面垂线是否与平行光管轴线重合。
红外、可见光传感器的校靶见图8,通过平行光焦平面成像原理,接收动态惯性测量装置发射的平行光束,通过综合显示器比较平行光束在传感器内成像的像点与传感器中心十字线的位置,进行校准(图8)[4]。
激光测距设备的校靶通过对准动态惯性测量装置发射激光束(相当于校靶镜反射光束)。光束进入平行光管成像系统在焦平面内成像,可以获得激光束相对平行光管轴线(机身纵轴线)的角度差,其原理与活动航炮校靶类似。

图7 活动航炮的校靶

图8 红外传感器的校靶
2.3 对于ABE校靶系统改进措施的思考
1)提高ABE校靶系统自动化程度
目前ABE校靶系统仅仅是一个测角系统,不能完成校靶的整个过程,还需要其他人员控制待校靶设备(如航炮、观瞄转塔)根据测角结果转动,经过多次测量-转动使其轴线与平行光管成像系统轴线平行,即与机身纵轴线共面、平行。这个过程不仅耗时而且必须增加一名校靶人员。为提高校靶效率和自动化程度,可以在运算控制装置上增加一个与载机火控系统交联的接口,给火控系统输出校靶驱动角,火控系统自动进行校靶。
2)提升ABE校靶系统的小型化程度
①考虑到校靶工作一般都在各类场站进行,运算控制装置可以去除其中的蓄电池,校靶系统电源由机上电源或其他外接电源供应。
②对于陆基校靶,直升机平台相对地面是静止不动的,不需要基准惯性测量装置实时输出机身纵轴线姿态角,所以针对陆基校靶,基准惯性测量装置可以去除,仅在基准框架上增加相互垂直的两面校靶镜用于动态惯性测量装置对机身纵轴线姿态角的测量。对于海上舰载直升机校靶,如果舰载直升机机上惯导精度可以满足校靶要求,校靶系统可以与机上惯导交联,机上惯导作为基准惯性测量装置实时输出机身纵轴线姿态角。
由于两轴稳定平台自身横滚角的变化不会引起平行光管光轴在机体坐标系中方位、俯仰变化,所以平台自身横滚变化Δγ后,平行光管发射的平行光束在机体坐标系中姿态角没有变化,反射光束在焦平面的像点G空间位置也不会变化。根据图9所示, 有以下等式成立:
Z0=Z1×cosΔγ
根据以上等式,可以得出:
Z=Z1+Z2
Δγ=γ-γ0
Z0=Z×cos(γ-γ0)-Ysin(γ-γ0)
[Z-Ytan(γ-γ0)]×sin(γ-γ0)
其中Y、Z的值通过焦平面CCD确定,γ为通过三轴陀螺传感器获得的稳定平台当前横滚角,γ0为机体平面横滚角。
解算出Y0、Z0后,就可以根据上文提到的测角原理得出反射光束与平行光管轴线即机身纵轴线的夹角。

图9 横滚角补偿原理图
3 视频叠加校靶技术方案
ABE校靶系统及其他校靶方法,都存在校靶过程不直接、校靶结果没有可视化显示的缺点。通过对各类校靶方法的分析,提出一种以视频处理、叠加技术为基础的快速校靶方案,人机交互性更为友好、简单。
对于武装直升机,“靶板”法和“测角”法校靶,主要都是进行直升机武器系统轴线基于机身轴线的校准。而视频叠加校靶技术,是在观瞄设备观测轴线与机身轴线偏离不大的情况下,其他武器系统轴线以观瞄设备观测轴线为基准进行校靶。(如果对机体机构进行改装,增加机身轴线CCD相机,武器系统也可以基于机身轴线校准)
视频叠加校靶系统硬件组成:航炮CCD相机、挂架CCD相机等。
对载机要求:观瞄视频数据为数字信号格式;校靶CCD相机与载机可以进行数据交联;机载综合处理软件能够对视频图像进行边缘检测处理,以提取其轮廓。
图像轮廓边缘检测基本原理:在直径为R的图像内,如果存在2个或2个以上对比度差值超过阈值K的像元,则“点亮”直径为R的圆面的中心点,再将“点亮”的中心点连接起来,形成图像的轮廓线,如图10所示。
视频叠加校靶原理如图11,综显以观瞄视频为背景视频,再叠加经线性化处理的观瞄图像及校靶CCD相机图像,校靶人员控制航炮等待校靶设备转动,使校靶CCD相机视频的线性化图像与观瞄视频的线性化图像重合,完成校靶过程,或机载软件通过轮廓匹配技术,自动控制航炮等待校靶设备转动,实行自动校靶。航炮校靶过程如图12-图15所示。
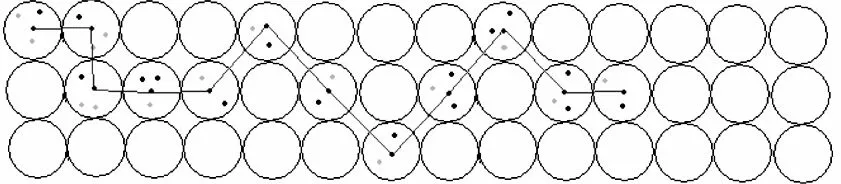
图10 图像轮廓边缘检测基本原理

图11 视频叠加校靶原理框图

图12 观瞄视频图像及其轮廓提取
视频叠加校靶的局限性:
1)对于校靶环境有要求,否则CCD相机无法得到清晰图像,视频处理软件无法提取清晰轮廓线。
2)只能针对航炮等可以方位、俯仰转动的设备进行校靶。

图13 航炮CCD相机视频图像及其轮廓提取

图14 未校靶前观瞄与航炮CCD视频叠加(综显显示)
3 结论
随着现代科学技术及装备的发展需要,特别是与部队的作战模式和战术运用的需要的提高,我们应逐步将提高校靶工作的认识,进行校靶方法的研究、改革,最终在装备研制开始就把使用快速、简便和精确的校靶方法当成一个重要的技术约束条件。通过分析,ABE校靶系统校靶技术成熟、精度高,使用方便快捷,适应性强,能够实现对飞机的全天候校靶,对现有飞机的校靶只需要进行一些机体结构的局部改装,不必更改载机的软硬件。所以,我国直升机校靶设备的研制可以参考ABE校靶系统,以测角为基本原理进行校靶,并及时跟踪校靶技术发展动态,积极探索新型校靶方法。
[1] 潘焕友,等.武装直升机机载武器校靶方法研究[D].北京:陆军航空兵学院,2006.
[2] Jaklitsch J J. GYROSCOPIC SYSTEM FOR BORESIGHTING EQUIPMENT,2004.
[3] Hamilton S B. GYROSCOPIC SYSTEM FOR BORESIGHTING EQUIPMENT BY OPTICALLY ACQUIRING AND TRANSFERRING PARALLEL AND NON-PARALLEL LINES[Z].1992.
[4] Hamilton S B. GYROSCOPIC SYSTEM FOR BORESIGHTING EQUIPMENT BY TRANSFERRING A FRAME OF REFERENCE[Z].1992.
Research on Checking Target Technology of Weapon System on Board Helicopters
WANG Zhichao, HUANG Fugui
(Naval Aeronautical Representative Office in Jingdezhen, Jingdezhen 333002, China)
This paper analyzed the advanced boresight equipment on basis of the development of the field of bore-sighting at home and abroad. Then, brought forward a new simple and quick method of bore-sighting principle for helicopter’s artillery by the technology of video-pile up and the new method could improve the campaign ability of weapon system.
helicopter;boresight;inertia platform
2016-07-08
汪智超(1985-),男,江西九江人,大学,助理工程师,主要研究方向:直升机航电系统。
1673-1220(2016)03-056-07
TJ06
A
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
哈尔滨轴承(2022年1期)2022-05-23
南京航空航天大学学报(2022年2期)2022-04-27
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
北京测绘(2021年7期)2021-07-28
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
火控雷达技术(2016年2期)2016-02-06
中学生数理化·八年级物理人教版(2014年1期)2015-01-09