直升机主减动特性三维参数化分析方法
2016-02-23 04:59沈安澜刘续兴伍特辉
直升机技术 2016年3期
沈安澜,陈 静,刘续兴,伍特辉
(中国直升机设计研究所,江西 景德镇 333001)
直升机主减动特性三维参数化分析方法
沈安澜,陈 静,刘续兴,伍特辉
(中国直升机设计研究所,江西 景德镇 333001)
直升机主减速器是连接旋翼与机体的重要结构,为旋翼提供动力的同时传递旋翼升力。作为机体动载荷的源头,主减速器的动力学特性决定机体的振动水平。为主减动力学设计提供一套简便有效的计算分析方法,从工程实际应用出发,以八撑杆主减动力学特性计算为例提出了一种三维参数化分析方法,并建立辅助有限元模型对参数化分析方法进行验证计算。结果表明,参数化分析方法计算精度满足工程实际应用的需要。
八撑杆主减;动力学特性;三维参数化;分析方法
0 引言
直升机主减是连接旋翼与机体的重要传动部件,为旋翼提供动力的同时为直升机传递升力,是直升机载荷传递的重要途径。主减速器作为机体动载荷的来源,其动力学特性决定机体的振动水平。目前主减安装形式主要可以分为两大类:①主减与机体之间直接采用刚性连接,采用这种主减连接形式的直升机机动性好,操控性强,但机体振动水平高,如“黑鹰”;②采用多撑杆形式,多撑杆主减安装形式大多采用聚焦式主减隔振系统[1,2],根据具体的结构形式又可分为四撑杆加防扭盘以及八撑杆取消防扭盘两种不同的构型。四撑杆连接形式在国内已经在多个型号上应用,八撑杆主减连接形式目前主要是俄制直升机上使用较多,如卡28、米26等。八撑杆主减构型主要有结构形式简单、可靠性高等优点,但目前国内直升机设计中还未采用八撑杆构型,在进行结构设计时无简单可靠的计算分析工具。
本文以八撑杆主减安装形式为例,推导得到三维参数化计算分析方法,并应用该方法计算得到八撑杆构型主减的安装频率和垂向载荷传递率,并且建立有限元验证模型,利用有限元模型对参数化模型计算结果进行对比验证。参数化分析方法需要建立在一些简化假设的基础上,并且在理论方程推导过程中要对模型进行适当的简化,可以降低系统结构的自由度,降低模型的复杂度,给出系统主要动力学特征,通过快速计算能得到主要结构参数的设计参考值。另一方面,在进行结构设计时包含多个主要的设计变量,在需要对设计变量进行快速设计时,参数化方法可以快速计算设计变量与设计目标值之间的关系,为确定设计参数给出指导方向。参数化方法比起真实结构复杂有限元模型的计算,能节约时间,增加效率。
1 参数化分析模型
参数化分析模型的建立与一般的有限元模型不同,参数化模型主要是将系统主要结构特征以数学参数进行表达,并通过数学方程的推导,得到系统的主要特性。本文以八撑杆构型主减安装系统为分析对象,适当简化后进行数学推导得到主减三维参数化分析模型。
为了突出主减系统的动力学特征,将主减与机体结构简化为具有质量的刚体,将八撑杆简化为轴向具有一定刚度的无质量的弹簧,因为撑杆一般为空心杆,其质量相对于主减与机体结构而言基本可以忽略,则模型可以简化为如图1所示的三维参数化分析模型。坐标XYZ的原点O是主减的旋转中心。
系统的参数定义为:
旋翼(包括桨毂及桨叶)的质量和转动惯量分别为:M0、J0和j0,同时直升机机体的质量和转动惯量为:M1、J1、和j1,撑杆的刚度如图1所示,分别定义为k1、k2、k3、k4。
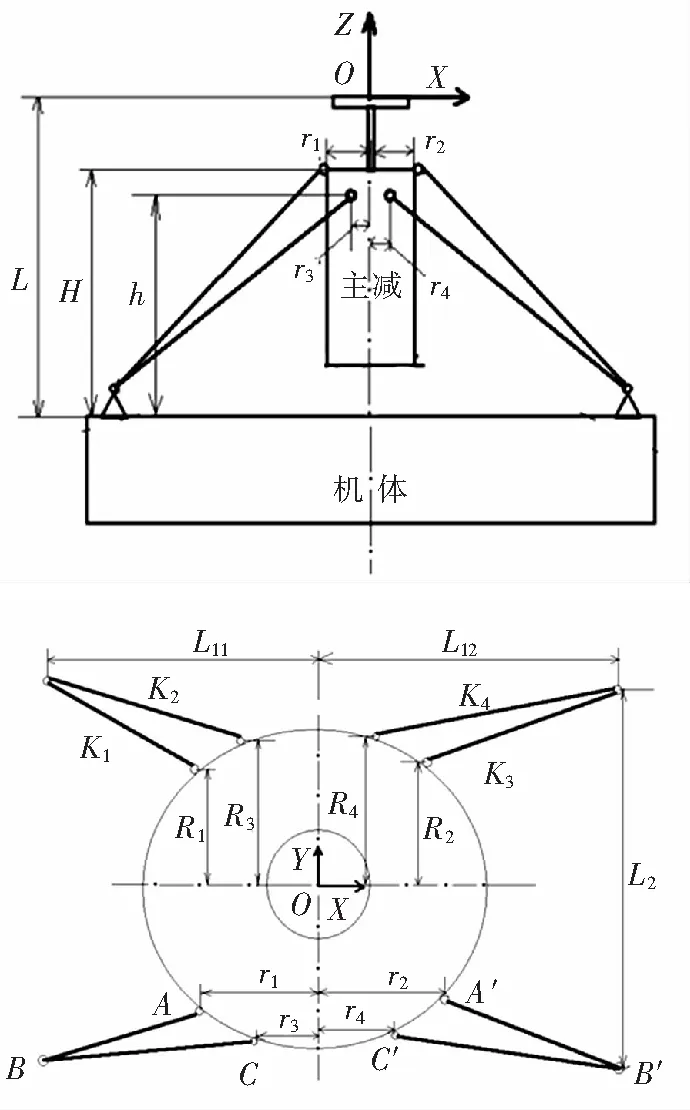
图1 聚焦式主减隔振系统平面示意图
参数化分析模型共有八个自由度,旋翼处有三个自由度z0、θ0、α0,假设直升机机体有五个自由度x1、y1、z1、θ1、α1,θ0、θ1分别是旋翼和机身以旋转中心绕Y轴旋转的角度,α0、α1分别是旋翼和机身以旋转中心绕X轴旋转的角度。
结构参数假设包括:
机身和旋翼的重量远远大于杆件的重量,所以杆件的质量和转动惯量在列方程时忽略不计。在推导方程时根据主减三向z0、θ0、α0引起的运动,利用拉格朗日方程,推导系统振动方程。
同时建立了一个相对应的有限元验证模型,如图2所示。
1.1 聚焦式主减隔振系统理论推导
在将模型简化,确定模型的自由度和各个建模参数后,就可以根据上面的假设和简化,通过多刚体动力学[3-7]对模型进行进一步的理论建模推导。所有字母运算通过Mathmatic软件进行推导[8,9]。
系统在垂向平动、绕着X轴与绕着Y轴转动时会相互作用,所以在建立改进模型的理论模型时,将模型在垂向平动引起的运动以及绕着Z轴和绕着Y轴转动时引起的运动分开推导,然后根据拉格朗日公式建立系统振动方程。
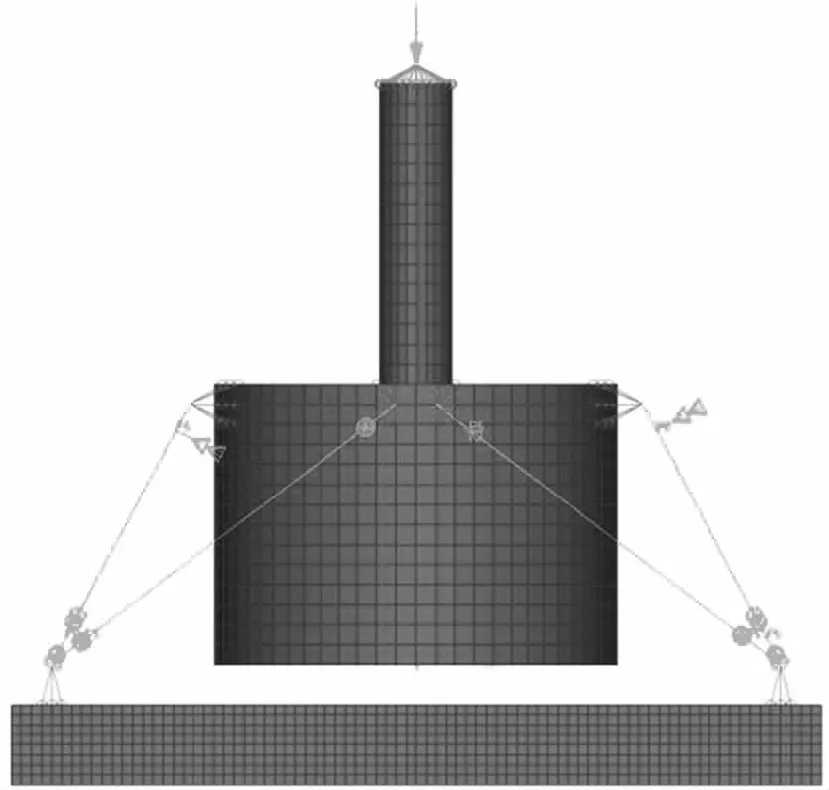
图2 聚焦式主减隔振系统有限元验证模型示意图
1.1.1 由z0引起的运动方程
参数化分析模型的建立是根据多刚体动力学的理论进行,主减垂向运动位移计为z0,机体垂向运动位移计为z1。由垂向位移引起如图1所示右边各点的位移如下:
A点坐标为:[-r1,-R1,H-L+z0],A′点坐标为:[r2,-R2,H-L+z0],B点坐标为:[-L11,-L2/2,-L+z1],B′点坐标为:[L12,-L2/2,-L+z1],C点坐标为:[-r3,-R3,h-L+z0],C′点坐标为:[r4,-R4,h-L+z0]。
1.1.2 由θ0引起的运动方程
由主减航向θ0以及机体航向θ1转动引起的系统的运动方程的建立过程和以上由z0引起的运动方程的建立过程的思路相同。
如图1所示右边各点的坐标为:
A点坐标为:
[(H-L)sinθ0-r1cosθ0,-R1,
(H-L)cosθ0+r1sinθ0];
A′点坐标为:
[(H-L)sinθ0+r2cosθ0,-R2,
(H-L)cosθ0-r2sinθ0];
B点坐标为:
[-L11cosθ1-Lsinθ1,-L2/2,L11sinθ1-Lcosθ1];
B′点坐标为:
[L12cosθ1-Lsinθ1,-L2/2,-L12sinθ1-Lcosθ1];
C点坐标为:
[(h-L)sinθ0-r3cosθ0,
-R3,(h-L)cosθ0+r3sinθ0];
C′点坐标为:
[(h-L)sinθ0+r4cosθ0,-R4,
(h-L)cosθ0-r4sinθ0]。
1.1.3 由α0引起的运动方程
由主减侧向α0以及机体侧向α1转动引起的系统的运动方程的建立过程和以上由θ0引起的运动方程的建立过程的思路相同。
如图1所示右边各点的坐标为:
A点坐标为:
[-r1,-R1cosα0-(H-L)sinα0,
(H-L)cosα0-R1sinα0];
A′点坐标为:
[r2,-R2cosα0-(H-L)sinα0,
(H-L)cosα0-R2sinα0];
B点坐标为:
[-L11,-L2/2cosα1+Lsinα1,
-Lcosα1-L2/2sinα1];
B′点坐标为:
[L12,-L2/2cosα1+Lsinα1,
-Lcosα1-L2/2sinα1];
C点坐标为:
[-r3,-R3cosα0-(h-L)sinα0,
(h-L)cosα0-R3sinα0];
C′点坐标为:
[r4,-R4cosα0-(h-L)sinα0,
(h-L)cosα0-R4sinα0]。
如图1,主减及其安装结构为左右对称,在受到外载荷激励时需注意其左右各点的位移不同,在讨论其位移时左边各点的位移可以参照右边各点位移情况进行确定,在文中不累述。
为了简化方程,假设主减撑杆只承受轴向载荷,不产生弯曲变形,通过各连接点的位移,可以计算得到由主减垂向、侧向以及航向运动引起的系统总动能T。根据主减撑杆刚度以及撑杆变形,得到总势能U。为简化分析忽略阻尼的影响,通过拉格朗日方程,建立参数化模型在三维空间内运动引起的振动运动方程。
1.1.4 系统总运动方程
根据1.1.3所述得到总动能T和总势能U。建立由模型在平面内运动引起的振动运动方程。
总动能可以如下表示:
总势能可以如下表示:
U=U1+U2+U3+U4+U5+U6+U7+U8
(3)
式中U1~U8为八根撑杆在其外载作用下变形产生的势能,其表达式如下:
其中k1~k4分别为AB,BC,A′B′和B′C′撑杆刚度。
根据式(1)拉格朗日方程,系统总的质量阵为:
总的刚度阵为:
主减系统的动力学方程为:
在正弦激励条件下,可知式(14)的稳态解呈正弦形式,从而得到主减安装频率计算式如式(15)所示,即可求得系统的固有频率。
式(15)中,ω=2πf,f为系统的固有频率。
在正弦激励条件下,可知式(14)的稳态解呈正弦形式。从而得到垂向载荷传递率如式(16)所示:
其中部分字母的意义为:
M11=M0,M22=J0,M33=j0,M44=M1,
M55=J1,M66=j1,M77=M88=M1+M2
K14=-K11
K21=K12
K24=-K12

K36=

K45=-K15,K51=K15,K52=K25,K54=K45
K63=K36
1.2 理论方法计算结果的验证
根据上节推导得到的传递率表达式(15)与式(16),将已知参数代入表达式中,得到八撑杆构型主减的安装频率和垂向载荷传递率,分别如表1、图3-图7所示。
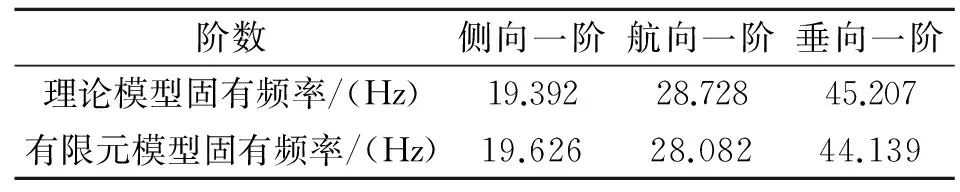
表1 理论模型和有限元模型前三阶频率比较
将参数化计算得到的系统各阶固有频率与有限元的对应计算结果相比较,如表1所示。结果表明,参数化计算分析模型和有限元模型能够较好地一致,彼此验证。

图3 参数化方法计算垂向合力传递率幅频曲线

图4 有限元计算垂向合力传递率幅频曲线

图5 侧向一阶模态
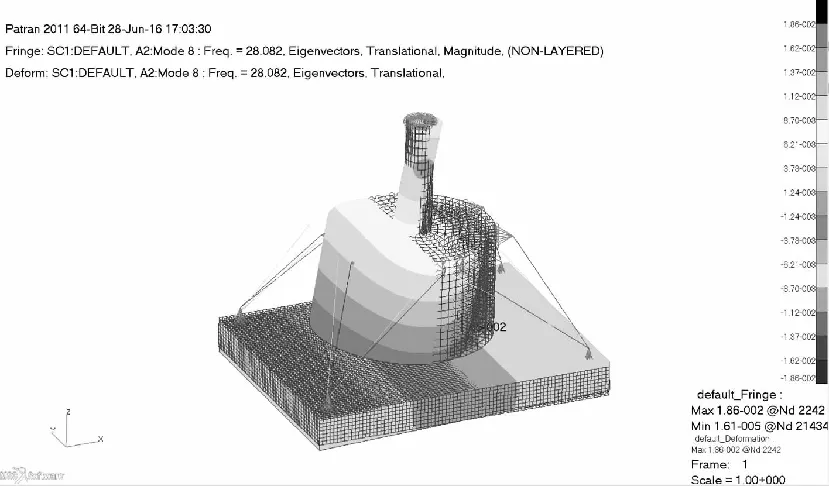
图6 航向一阶模态

图7 垂向一阶模态
2 结论
本文从工程实际应用出发,以八撑杆主减安装构型为例,提出了一种参数化计算分析方法,并与有限元计算结果进行对比,得出如下结论:
1)参数化分析的方法系统固有频率计算结果和有限元的计算结果有较好的一致性,验证了该参数化分析方法的正确性;
2)利用参数化分析模型计算得到了八撑杆主减安装形式的频率以及垂向载荷传递关系,对该构型主减安装的结构动力学特性有了初步的了解,可以为后续该构型主减安装结构设计提供理论指导;
3)本文参数化分析模型的建立方法可推广应用于其他复杂结构的研究和设计,为其提供了理论支撑,同时也为早期结构动力学设计提供了计算分析工具。
[1] Yilmaz C, Kikuchi N. Analysis and design of passive band-stop filter-type vibration isolation for low-frequency application[J]. Journal of sound and Vibration, 2006(293).
[2] Coppola G, Liu K F. Control of a unique active vibration isolator with a phase compensation technique and qutomatic on/off switching[J]. Journal of sound and vibration,2010 (329).
[3] 林 平. 发动机配气机构的动力学模型及计算分析[J].重庆理工大学学报,2010(08).
[4] Hu B, Lu Y. Analyses of Inverse Kinematics, Statics and Workspace of a Novel 3RIS-3SPR Serial-Parallel Manipulator[J]. The Open Mechanical Engineering Journal, 2012(6).
[5] 于大国. 基于并联机构的多维隔振平台设计理论与应用研究[D]. 镇江:江苏大学,2009.
[6] 张清华. 平面3-RRR柔性并联机器人机构弹性动力学建模与振动主动控制研究[D].广州:华南理工大学,2013.
[7] 宋楚晨. 直升机主旋翼半主动DAVI隔振系统设计[D]. 南京:南京航空航天大学,2014.
[8] 王贵福, 王晓玲. Mathematica及其数学应用[M].北京:中国农业出版社,2013.
[9] 尹志宏, 机械结构微分方程求解中的符号运算方法[J]. 吉林工业大学学报. 2001(11).
A New Three-dimensional Mathematics Analysis Method of Helicopter Main Gearbox Dynamic Characteristics
SHEN Anlan , CHEN Jing, LIU Xuxing, WU Tehui
(China Helicopter Research and Development Institute,Jingdezhen 333001, China)
The main gearbox of helicopter is an important device which connects the main rotor and the body of helicopter. The main gearbox provides power to the main rotor and transfer lift force to the body of helicopter. As the source of dynamic load,the dynamic characteristics of main gearbox decides the vibration level of the helicopter. In order to provide a simple and effective method for the calculation of main gearbox dynamics design, a new three-dimensional mathematics analysis method which calculated eight strut main gearbox dynamic characteristics was presented in this paper. From the practical application, the auxiliary finite element model of the parametric analysis was established to verify the mathematics method, and the results indicated that the accuracy of mathematics analysis method meet the needs of practical applications.
eight strut main gearbox ;dynamic characteristics;three-dimensional mathematics;analysis method
2016-06-29
沈安澜(1985-),男,浙江临安人,硕士,工程师,主要研究方向:直升机振动控制。
1673-1220(2016)03-018-08
V231.9;V233.1;TB115.1
A
猜你喜欢
中国修船(2022年4期)2022-10-13
空气动力学学报(2022年4期)2022-08-23
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
北京航空航天大学学报(2021年9期)2021-11-02
舰船科学技术(2021年4期)2021-05-17
军民两用技术与产品(2021年9期)2021-03-09
科学技术创新(2020年31期)2020-10-30
电子制作(2019年9期)2019-05-30
北京汽车(2018年4期)2018-09-08