星载线阵遥感器在轨几何外检校技术研究
2016-02-23 03:42:32周楠何红艳
航天返回与遥感 2016年5期
周楠 何红艳
(北京空间机电研究所,北京 100094)
星载线阵遥感器在轨几何外检校技术研究
周楠 何红艳
(北京空间机电研究所,北京 100094)
文章叙述了星载线阵遥感器的严格成像几何模型,分析了姿态角误差随时间的变化情况,发现俯仰角误差和滚动角误差随时间变化的线性规律。在此基础上,提出一种基于姿态角常差检校模型同时顾及姿态角误差随时间变化的线性量的在轨几何外检校方法,检校参数不仅由三个角元素误差组成,同时包含俯仰角误差和滚动角误差随时间变化的线性量,并给出了相应参数求解方法。利用高精度控制数据和高分辨率卫星影像验证了文章的模型和算法。试验结果表明,改进后的外检校试验结果优于常差检校模型,尤其是在线阵方向上的定位精度从17.9个像素提高到1.0个像素,这说明了俯仰角误差随时间变化的线性量影响很大;在沿轨方向的定位精度从 5.3个像素提高到 3.7个像素,说明滚动角上的随时间变化的线性量客观存在,但是相对于俯仰角误差随时间变化的线性量影响不大。采用文章提出的在轨几何外检校方法,影像定位精度显著提升。
外检校 常差检校 线性量 星载线阵遥感器
0 引言
高分辨率遥感影像具有分辨率高、获取迅速、不受区域限制等优点,广泛应用国土资源勘查、军事侦察、农林调查、环境监测以及测绘与地理信息获取等领域[1],如法国的SPOT系列、美国的IKONOS 等[2-3]。国产卫星影像分辨率不断提升,但影像几何定位精度与同类国外卫星相比较低,一定程度上限制影像的有效使用。因此,研究提升国产卫星几何定位精度的方法具有重要现实意义。影响卫星影像几何定位精度的因素很多,如姿轨测量误差、平台稳定性、相机安装误差、镜头几何畸变、结构变形等[4-6]。因此,通过卫星在轨几何检校技术,消除或减弱系统误差对定位精度的影响,是提升卫星遥感对地目标定位精度的必然途径。
国外高分辨率卫星具有完整的在轨几何标定系统,但很少有相关文献描述标定模型和相关算法。法国空间中心(CNES)将影响SPOT卫星定位精度的误差分为静态误差和动态误差等,采用分布定标的方法[7-8]。瑞士苏黎世联邦工业大学(IGP)针对ALOS卫星的PRISM的高精度几何建模方法进行了深入研究[9],基于开发的SAT—PP软件系统和全球范围的大量地面控制点对PRISM相机进行了整体定标。国内大部分学者都是基于严格成像几何模型利用偏移矩阵或者姿态角常差方法进行在轨几何外检校。文献[10]最早提出广义的偏移矩阵来检校外部因素引起的误差,但偏移矩阵没有明确的物理意义;文献[11]分析了偏置角对定位精度的影响,赋予偏置矩阵明确的物理意义;文献[12]等提出通过求解俯仰、滚动、偏航3个旋转角度进行误差补偿后对CBERS-02B影像进行在轨几何外检校;文献[13]提出的姿态误差检校方法证明了姿态角误差是影响卫星几何定位精度的主要因素。
目前,就国产卫星在轨几何外检校而言,主要采用基于偏移矩阵或者姿态角常差检校方法。研究表明两种方法检校精度相近[14-15],并且都未考虑误差随时间变化的情况。鉴于此,本文提出一种改进的姿态角常差检校模型,模型顾及姿态角常差随时间变化量,以提高国产卫星的几何定位精度。
1 线阵卫星遥感影像的几何外检校原理
1.1 严格成像几何模型
对于国产卫星,GPS测定的是GPS天线相位中心在WGS84坐标系下的位置,星敏感器或陀螺测定的为星敏主光轴在J2000坐标系下的姿态角,据此,可以建立严格成像几何模型[16-17]。

1.2 改进的外检校模型
在线阵卫星影像的严格几何模型中,定轨定姿的精度会对定位精度产生不同程度的影响。我国的定轨技术比较成熟,精度可以达到米级甚至分米级,轨道误差对定位精度的影响很小;然而,定姿精度较低,是导致直接对地定位精度低的主要原因,影响姿态精度不高的主要原因不是跳变而是系统误差的存在[18]。同时,理想情况下,相机的安装矩阵是单位阵,但是由于相机在安装过程中的误差和卫星发射时巨大的加速度都可能导致相机偏离理想的位置,从而使安装矩阵不再是单位阵。由于相机安装矩阵和卫星姿态角对定位精度的影响是一致的,也很难将这两者分开来,常差检校模型在处理的过程中把卫星的三个姿态角作为未知数,把星历数据中读取的姿态角大小作为初始值,从而求解出姿态角的改正值,也就是姿态角常差[19]。



将其标准化得到

常差检校模型,如式(6)所示:

由于姿态角初始值存在误差,分别以姿态角(φ,ω,к)作为未知数,将式(6)按泰勒级数展开,取其一次项得到如下误差方程:

式中 V为观测方向的误差向量;VX,VY,VZ为观测方向误差的三个分量。为mc向量的三个分量;为ms向量的三个分量。
姿态设备测得的姿态角作为初始值代入式(7),经迭代计算得到姿态角的改正量(Δφ,Δω, Δк ),即为对应扫描行姿态角的误差值,将其与初始值相加便得到姿态角检校值。
针对上面的模型,本文在常差检校的基础上提出一种改进的外检校方法:在解求三个角度常差的同时解求俯仰角和滚动角随时间变化的线性量kφ和kω,初值设为 0。tφ、tω和tк分别是t时刻姿态测量设备测得的三个姿态角,t0为起始时刻,精确的姿态角模型为:

2 试验结果与分析
2.1 基于姿态角常差模型的外检校试验
试验数据为一景卫星数据,在影像2 000行到6 000行之间自动提取870个控制点,点位分布如图1所示。
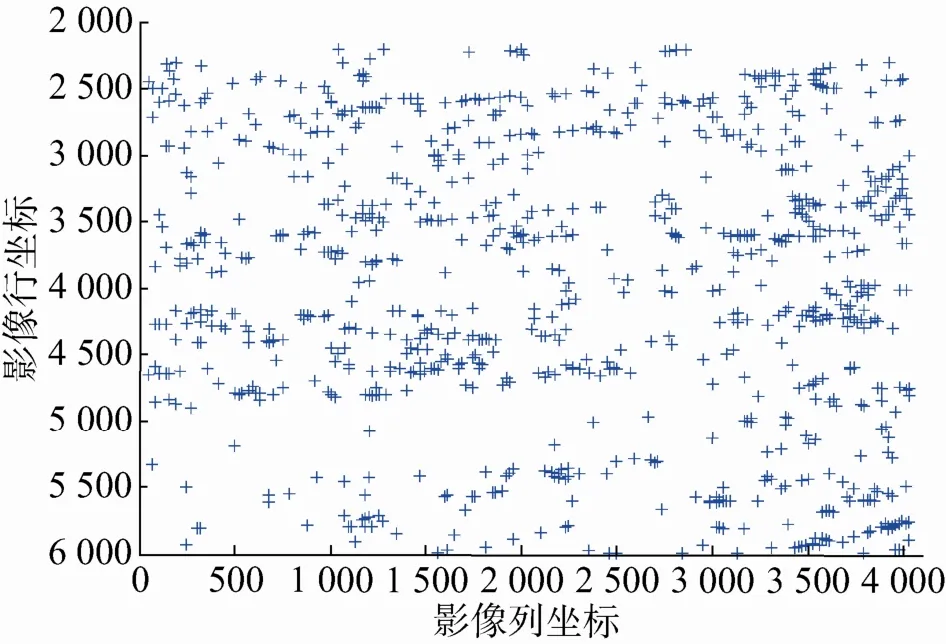
图1 控制点分布情况Fig.1 Control points layout
根据式(7),选取其中4个控制点解求姿态角常差,剩余的点作为检查点。外检校试验结果如表1。

表1 外检校试验结果Tab.1 Results of exterior calibration
分析表1的试验结果可以看出,采用姿态角常差模型的外检校精度为18.70个像素。
2.2 时间变化对常差检校结果的影响
根据式(7),选取在不同影像扫描行(即不同时间)的控制点计算姿态角常差,试验结果如表 2所示。
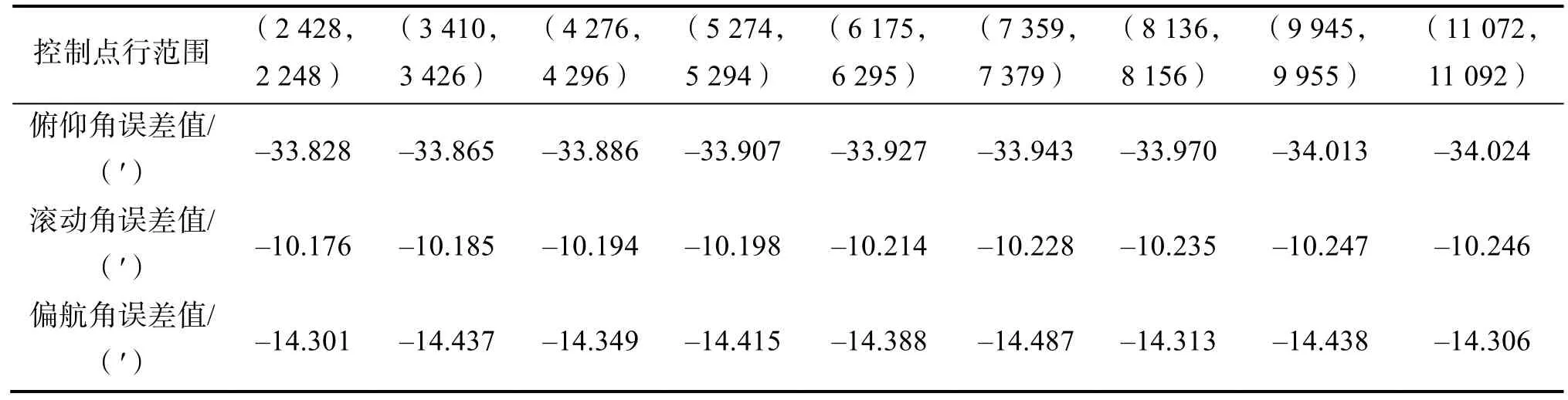
表2 姿态角常差随影像行变化量Tab.2 Results of constant attitude error
从表2可以看出,选取不同影像行进行外检校所得的姿态角误差值不同。图2以行坐标为X轴,分别以俯仰角、滚动角和偏航角误差值为纵轴,可得如下曲线。

图2 姿态角误差随影像行的变化量Fig.2 Results of constant attitude error
从图2可以看出,俯仰角和滚动角误差随时间近似成线性变化,而偏航角误差不具备此规律。原因在于偏流角校正的时候需要考虑到偏航角的影响,并且偏航角与俯仰角、滚动角均相关,因此偏航角误差不具备此规律。
2.3基于改进的姿态角常差检校模型的外检校
采用本文提出的改进的姿态角常差检校模型进行外检校,使用式(8),试验结果如表3所示。

表3 检查点残差结果Tab.3 Results of check points error
检查点的残差分布如图3所示:
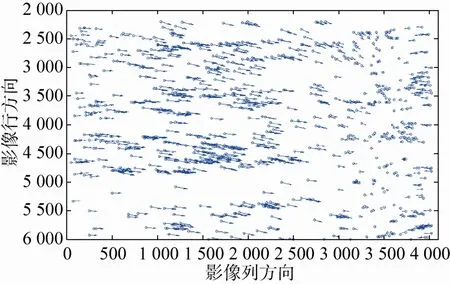
图3 检查点残差Fig.3 Check point error layout
从表3的检校结果可以看出,改进后的外检校试验结果优于常差检校模型,尤其是在影像Y方向上的定位精度从17.9个像素提高到1.0个像素,这说明了俯仰角上的随时间变化的线性量影响很大;在影像 X方向的定位精度从 5.3个像素提高到 3.7个像素,说明滚动角上的随时间变化的线性量kω客观存在,但是相对于kφ影响不大。表4为采用改进后的外检校模型计算的检校参数,从表4外检校参数结果也证明滚动角上的随时间变化的线性量kω客观存在,但是相对于kφ影响不大。
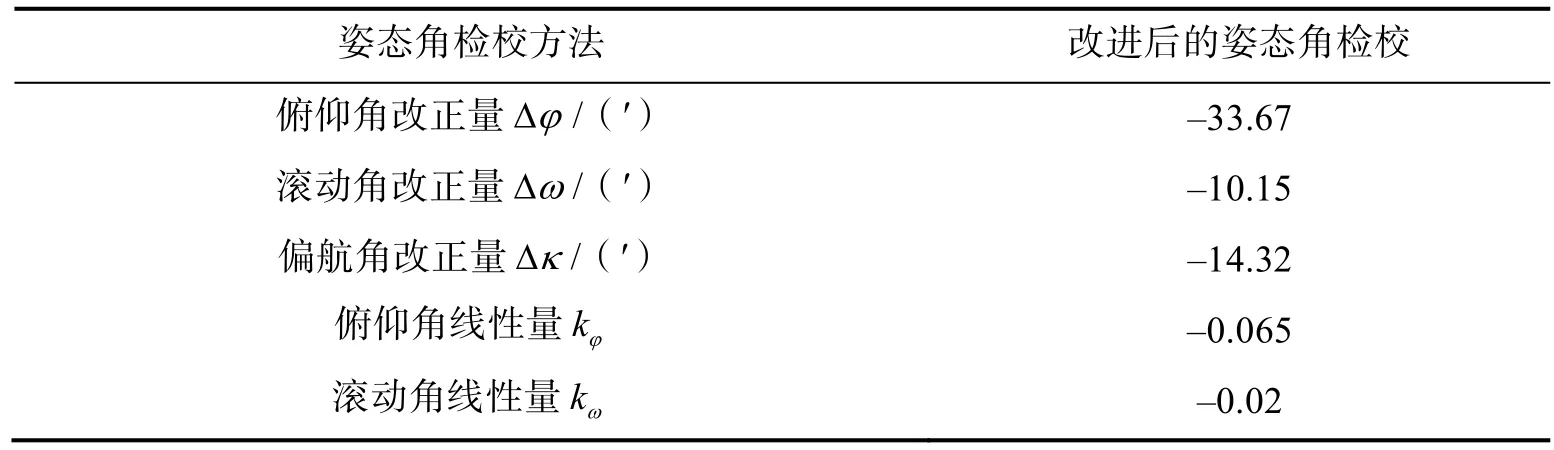
表4 外检校参数结果Tab.4 Results of exterior calibration
因此,俯仰角上的随时间变化的线性量kφ和滚动角上的随时间变化的线性量kω是存在的;相对于滚动角上的随时间变化的线性量kω,俯仰角上的随时间变化的线性量kφ引起的误差更大;在缺少控制点的情况下,可以优先解求俯仰角上的随时间变化的线性量kφ。
从图3的残差图可以看出,经过改进后的外检校后,残差仍然存在明显的畸变特性,主要是因为本文未进行内方位元素检校。
3 结束语
本文以高分辨率卫星遥感影像为研究对象,提出在轨几何外检校改进模型并进行相关验证试验。试验表明,经过充分的在轨几何外检校工作,可以充分消除由于几何定位的外部误差影响,验证了本文提出的改进的常差检校模型的的正确性和有效性。但本文仍然有许多工作需要进一步研究,主要为:
由于采用陀螺定姿,定姿精度不足、陀螺时间漂移问题均使卫星无控制定位精度较差;需要通过长期监测卫星无控定位精度随侧摆、成像区域及成像时间的变化趋势,建立真实的外方位元素补偿模型,提升影像的无控制定位精度;
本文未对相机的镜头畸变、主距误差等进行检校,并未消除内方位元素误差对影像定位精度的影响。
References)
[1]张永生, 巩丹超, 刘军. 高分辨率遥感卫星应用[M]. 北京: 科学出版社, 2004: 10-12. ZHANG Yongsheng, GONG Danchao, LIU Jun. Application of High Resolution Remote Sensing Satellite[M]. Beijing: Science Press, 2004: 10-12. (in Chinese)
[2]JACOBSEN K. Comparison of Mapping with MOMS and SPOT Images[J]. IAPRS, 1994, 30(B4): 225-230.
[3]GRODECKI J, GENE D. IKONOS Geometric Accuracy[C]//Proceeding of Joint Workshop of ISPRS Working Groups I/2, I/5 and IV/7 on High Resolution Mapping from Space, Hannover, Germany, 2001.
[4]EBNER H, KOMUS W, STRUNZ G, et al. Simulation Study on Point Determination Using MOMS_O2/D2 Imagery[J]. Photogrammetric Engineering & Remote Sensing, 1991, 57(10): 1315-1320.
[5]SRIBASTAVA P K, ALURKAR M S. In-flight Calibration of IRS-1C Imaging Geometry for Data Products[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 1997, 52(7): 215-221.
[6]KOMUS W, LEHNER M. Geometric In-flight Calibration of the Stereoscopic CCD-line Scanner MOMS-2P[C]//ISPRS Com I Symp, Bangalore, India, 1988.
[7]POLI D, TOUTIN T. Review of Developments in Geometric Modelling for High Resolution Satellite PushbroomSensors[J]. The Photogrammetric Record, 2012, 27(137): 58-73.
[8]BOUILLON A, GIGORD P. SPOT5 HRS Location Performance Tuning and Monitoring Principle[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2006, 60(3): 134-146.
[9]GRUEN A, KOCAMAN S, WOLFF K. Calibration and Validation of Early ALOS/PRISM Images[J]. The Journal of the Japan Society of Photogrammetry and Remote Sensing, 2007, 46(1): 24-38.
[10]徐建艳, 侯明辉, 于晋, 等. 利用偏移矩阵提高 CBERS图像预处理几何定位精度的方法研究[J]. 航天返回与遥感, 2004, 25(4): 25-29. XU Jianyan, HOU Minghui, YU Jin, et al. Study of CBERS CCD Camera Bias Matrix Calculation and its Application[J]. Spacecraft Recovery &Remote Sensing, 2004, 25(4): 18-23. (in Chinese)
[11]张过. 缺少控制点的高分辨率卫星影像几何纠正[D]. 武汉: 武汉大学, 2005. ZHANG Guo. Rectification for High Resolution Remote Sensing Image Under Lack of Ground Control Points[D]. Wuhan: Wu Han University, 2005. (in Chinese)
[12]祝小勇, 张过, 唐新明, 等. 资源一号 02B卫星影像几何外检校研究与应用[J]. 地理与地理信息科学, 2009, 25(3): 16-18. ZHU Xiaoyong, ZHANG Guo, TANG Xinming, et al. Research and Application of CBRS02B Image Geometric Exterior Calibration[J]. Geography and Geo-information Science, 2006, 25(3): 16-18. (in Chinese)
[13]袁修孝, 余翔. 高分辨率卫星遥感影像姿态角系统误差检校[J]. 测绘学报, 2012, 41(3): 385-392.YUAN Xiuxiao, YU Xiang. Calibration of Angular Systematic Errors for High Resolution Satellite Imagery[J]. ActaGeodaetica et Cartographica Sinica, 2012, 41(3): 385-392. (in Chinese)
[14]孟伟灿, 朱述龙, 曹闻, 等. TDICCD 交错拼接推扫式相机严格几何模型构建与优化[J]. 测绘学报, 2015, 14(12): 1340-1350. MENG Weican, ZHU Shulong, CAO Wen, et al. Establishment and Optimization of Rigorous Geometric Model of Push-broom Camera Using TDICCD Arranged in an Alternating Pattern[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(12): 1340-1350. (in Chinese)
[15]孟伟灿, 朱述龙, 曹闻, 等. 线阵推扫式相机高精度在轨几何标定[J]. 武汉大学学报: 信息科学版, 2015, 40(10): 1392-1399. MENG Weican, ZHU Shulong, CAO Wen, et al. High Accuracy On-orbit Geometric Calibration of Linear Push-broom Cameras[J]. Geomatics and Information Science of Wuhan University, 2015, 40(10): 1392-1399. (in Chinese)
[16]胡芬. 三片非共线TDICCD成像数据内视场拼接理论与算法研究[D]. 武汉: 武汉大学, 2010. HU Fen. Research on Inner FOV Stitching Theories and Algorithms for Sub-images of Three Non-collinear TDICCD Chips[D]. Wuhan: Wuhan University, 2010. (in Chinese)
[17]王涛. 线阵CCD传感器实验室几何定标的理论与方法研究[D]. 郑州: 信息工程大学, 2012. WANG Tao. Study on Theories and Methods of Linear CCD Sensor Geometric Calibrated Based on Field[D]. Zhengzhou: Information Engineering University, 2012. (in Chinese)
[18]余俊鹏, 孙世君, 毛建杰. 卫星遥感影像外方位元素的误差传播研究[J]. 航天返回与遥感, 2011, 32(1): 18-23. YU Junpeng, SUN Shijun, MAO Jianjie. Study on Error Propagation of Exterior Orientation Elements of Satellite Remote Sensing Imagery[J]. Spacecraft Recovery & Remote Sensing, 2011, 32(1): 18-23. (in Chinese)
[19]余俊鹏. 高分辨率卫星遥感影像的精确几何定位[D]. 武汉: 武汉大学, 2009. YU Junpeng. Accurate Geometric Positioning of High Resolution Satellite Remote Sensing Imagery[D]. Wuhan: Wuhan University, 2009. (in Chinese)
[20]袁修孝, 余俊鹏. 高分辨率卫星遥感影像的姿态角常差检校[J]. 测绘学报, 2008, 37(1): 36-41. YUAN Xiuxiao, YU Junpeng. Calibration of Constant Angular Error for High Resolution Remotely Sensed Imagery[J]. Acta Geodaetica et Cartographica Sinica, 2008, 37(1): 36-41. (in Chinese)
Research of Geometric Exterior Calibration of Space-borne Linear Array Sensor
ZHOU Nan HE Hongyan
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
This paper briefly describes imaging geometric model of space-borne linear array sensors, analyzes attitude angle variation with time and founds out a linear rule that the pitch angle and roll angle error variy with time. On this basis, a novel method of in-orbit geometric exterior calibration is proposed for geometric exterior calibration, which is based on the constant attitude error model and takes into account the amount of attitude errors of linear change with time. Also, a corresponding parameters solution is given. The model and algorithm of this article are verified by using high-precision ground control points and high-resolution satellite imagery. Experiment sindicate that the improved exterior calibration results are better than those of the previous algorithm. Especially, the positioning accuracy of the linear array direction is improved from 17.9 pixels to 1.0 pixel, which shows that the effect of the linear amount of pitch angle error change with time is significant. The positioning accuracy of the flight direction is improved from 5.3 pixels to 3.7 pixels, which shows that the linear amount of roll angle error change with time is objective reality, but it has a little effect with respect to the linear amount of pitch angle error change with time. By using the proposed method, the image positioning accuracy was significantly improved.
exterior calibration; constant attitude error; linear amount; space-borne linear array sensor
P236
A
1009-8518(2016)05-0111-08
10.3969/j.issn.1009-8518.2016.05.013
周楠,男,1988年生,2012年获武汉大学摄影测量与遥感专业硕士学位,工程师。研究方向为高精度卫星影像定位。E-mail:nan_zhou2006@126.com。
(编辑:刘颖)
2015-11-10
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
学生天地(2020年3期)2020-08-25 09:04:16
智富时代(2019年4期)2019-06-01 07:35:00
测绘通报(2019年4期)2019-05-10 08:16:20
测控技术(2018年4期)2018-11-25 09:47:22
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45