大口径空间相机地面装调时的重力卸载方法
2016-02-23 03:42:25李玲赵野
航天返回与遥感 2016年5期
李玲 赵野
(北京空间机电研究所,北京 100094)
大口径空间相机地面装调时的重力卸载方法
李玲 赵野
(北京空间机电研究所,北京 100094)
大口径空间相机在地面装调时,结构受重力影响较大,各光学元件间的位置精度会发生变化。如果不对重力进行卸载,各反射镜间支撑结构在轨道空间的微重力环境下发生回弹,改变各元件之间的相对位置,会造成传递函数下降,影响系统成像品质。文章针对某型号三反同轴大口径空间相机,分析了在地面进行光轴水平状态装调时,结构的重力变形对镜头传递函数的影响,计算结果表明反射镜支撑结构的重力变形会造成光学传递函数下降超过20%。针对重力的影响,需要对次镜和三镜所处悬臂端进行卸载。文中设计了五种卸载方案,对各方案分别进行仿真和优化计算,确定了卸载方式和卸载力的大小,并设计了一套卸载装置,在实际装调中根据测试结果对卸载力进行修正。试验结果证明该方法满足系统调试要求,可为其它大口径相机地面装调的重力卸载提供参考。
大口径 地面装调 重力卸载 优化 空间相机
0 引言
光学装调的精度对空间光学相机的成像品质起关键作用。在地面进行系统装调时,重力原因产生的结构变形导致光学元件的面形和位置精度(镜间距、平移、倾角)发生变化,造成离焦[1]和系统传递函数(MTF)下降。如果偏移量超出允许范围,相机在轨运行时处于微重力环境下,装调时的重力变形会发生回弹,各反射镜的相对位置变化最终降低光学系统传递函数,影响成像品质。某大口径空间相机镜头在光轴水平状态下进行镜头装调,前后镜身均处于悬臂状态。根据结构力学分析的结果,支撑结构在重力下变形导致的次镜偏移达到0.03mm量级,对系统装调提出了较高的要求,在镜头装调过程中必须考虑重力的影响。
在相机装调过程中如何对重力进行卸载,目前的研究多集中于设计适当的支撑结构[2-3]及测量方式[4-5]以保证主反射镜的加工、装配面形精度。如果超大口径反射镜的支撑结构受质量限制不能满足地面装调要求,则需要引入额外的卸载装置。文献[6]在设计空间太阳望远镜1m主镜支撑方案时,地面光轴竖直装调时仅有三个轴向定位点进行定位,采用了经典的Hindle支撑进行辅助卸载。文献[7]考虑重力弯矩造成的主镜框变形,在主镜入框装配时对主镜框进行了卸载,保证了主镜装配完成后的面形精度。对于中心轴支撑的大口径反射镜,文献[8-9]采用旋转消重力法进行检测,设计了专用工装实时定心调节,并用辅料焊接法固定主镜与中心轴。文献[10-11]设计了专用的在轨重力卸载机构,通过摇架机构连接到精密步进电机,对镜片的6个自由度进行微调,以消除空间X射线望远镜中镜片的重力引起的残余应力。对于相机镜头的系统级重力卸载,通常对各镜之间的连接结构进行刚度设计[12-15]。随着空间相机分辨率的提高、焦距增长和口径的增大,消除重力的影响已经不能完全依赖支撑结构刚度。文献[16]提出了一种应用于大口径、长焦距反射光学系统的光学元件装调装置的设计方案,来实现6自由度的装调调整。文献[17]针对主镜口径520mm的三反同轴光学系统,对主镜、次镜、三镜和连接镜筒进行高精度定心加工并在主次镜系统360°旋转过程中进行次镜偏心量微调,基于干涉仪自准检验方法实现了三镜系统的微应力装配和系统整体像质的调整。对于1m以上口径的超大口径反射镜,支撑结构尺寸相应增大,采用高精度定心加工方法有一定难度。
本文针对某大口径相机水平装调时前后镜身大悬臂大弯矩的特点,对相机卸载进行了多种方案的分析比较,确定了卸载方式;通过优化计算获得了卸载力的分布,设计出一套满足光学系统装调要求的卸载装置,并通过了试验验证。
1 研究对象与建模
1.1研究对象
某大口径相机采用三反同轴光学系统,主反射镜口径超过1m。相机主体构型采用主承力框式结构,主镜组件、前镜身(包括前镜筒、次镜支架和次镜组件)以及后镜身(包括后镜身支架和三镜组件、焦面组件)都安装在主承力框上。相机整体的对外接口也在主承力框上。在进行系统装调时,采用光轴水平装调的方法,相机的三镜组件和次镜组件均处于悬臂状态,如图1所示。为保证主次镜间距的热稳定性,前镜筒采用热膨胀系数小、密度相对较低的复合材料。
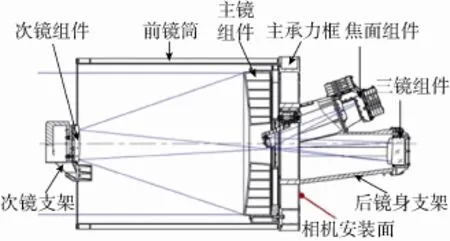
图1 大口径空间相机示意Fig.1 Sketch of a large aperture space camera
1.2有限元建模
采用有限元仿真的方法对相机的力学性能进行分析。首先对相机进行有限元建模:1)由于重力卸载位移计算时不涉及各反射镜面形,将主镜组件、次镜组件、三镜组件均用集中质量点代替,简化结构;2)主镜镜框采用四面体实体单元,其它结构件采用二维板壳单元建模,次镜、三镜质量点上连接一个沿光轴向的刚性单元,用刚性单元的线性偏转来度量次镜和三镜的倾角;3)各部组件间用多点约束连接。整机模型规模节点数为32 209,单元数60 784。边界条件为1)约束:约束主承力结构底面连接孔周节点的全部自由度;2)载荷:光轴水平放置,沿重力方向施加1gn重力。图2为空间相机有限元模型。Z向为光线入射方向,Y为重力反方向。
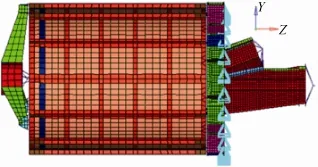
图2 空间相机有限元模型Fig.2 FEM model of space camera
2 卸载预分析
2.1 相机自重变形分析
相机的主镜组件、前镜筒带次镜支架、后镜身支架各自连接到主承力框,主承力框外圆法兰与载荷舱连接。水平地面装调时固定方式与相机实际安装方式相同,此时次镜和三镜处于悬臂端,重力造成的弯矩会使次镜和三镜位置发生变化,如图3所示。

图3 相机重力变形示意图及变形云图Fig.3 Sketch map and contour image of gravity deformation
计算相机在重力条件下的变形。主镜沿重力方向位移小于次镜位移的1/10。后续计算中,均考虑次镜和三镜相对主镜的位移,无卸载时如表1所示。

表1 无卸载时次镜、三镜相对主镜位移Tab.1 Displacement of second mirror and third mirror under gravity
2.2 系统影响分析
在光学分析软件CODEV中,将上述变形量直接在面属性中输入,分析有无重力影响的全视场全谱段MTF在奈奎斯特频率50线对/mm处的变化,见表2。

表2 全视场平均MTF(50线对/mm)Tab.2 Full field average MTF(50线对/mm)
由表2可见,有重力与无重力相比,弧矢方向MTF下降3%,子午方向MTF下降21%。由重力产生的支撑结构变形会严重影响光学镜头的MTF。如果在装调时不进行重力卸载,不仅相机入轨后微重力环境下的回弹量会严重影响成像效果,在地面装调时光学镜头 MTF也很难达到设计要求。必须在装调时把重力场引起的弹性变形减小到光学允许的范围内,使得在轨运行的微重力条件下,结构的回弹量不会对相机成像品质造成较大影响。
由于重力造成的离焦量很小,可以在调焦时消除,只需要对反射镜的径向偏移和倾角进行卸载。这里横向位移相对重力方向位移很小,分析时暂不考虑横向位移,并以全色视场平均值来考虑4个变量对传递函数的影响。按照光学设计要求,有重力时平均MTF下降不超过0.01。在光学分析软件CODEV中分别输入次镜和三镜的平移、重力倾角数值,考察 MTF的变化量。经过多组数值组合计算,可知次镜平移0.005mm,重力倾角10″,三镜平移0.01mm,偏移量倾斜20″时,全视场平均传函下降0.01。以此作为次镜、三镜的重力卸载目标。
3 卸载方案与设计结果
3.1 卸载方案设计
主镜装配时采用文献[7]所述的方法保证主镜入框后的面形满足要求,次镜和三镜组件在单独安装状态下经实测,面形也满足使用要求。文中针对次镜和三镜的刚体位移进行卸载方案设计,计算相机在不同加载力的工况下,次镜和三镜的位移变化。
根据后镜身支架的结构特征,卸载力施加在三镜组件连接的后镜身支架法兰上。在有限元模型中法兰两端节点施加拉力计算三镜的重力位移。经过计算,满足三镜卸载要求的最小卸载力为两端各400N。卸载实现的关键在于前镜身卸载方式的确定。
根据前镜身的结构特征设计了多种卸载方案,如表3所示。方案一采用的吊带卸载,具有极佳的工程可实施性,是目前最常用的反射镜光轴水平支撑方式[18-19],可以很好地实现对结构半圆柱段的柔性包覆。其它方案均采用空间结构地面测试时常用的重力机械悬吊方式[20],在不同的部位施加不同数量和大小的卸载力。方案二在次镜支架中心筒水平两点施力,施力点距离次镜较近,可以用较小的力施加对次镜的影响。方案三为圆周三点均布卸载,顶部一点施加向上的拉力,下方两点施加沿径向的推力。方案四为前镜筒法兰水平两点施力,可以改变前镜筒法兰的位置。方案五为前镜筒法兰上半圆五点卸载,前镜筒外圆沿轴向均布12条纵筋,卸载力施加在间隔30°的筋板上。表3中F1~F5分别为各方案下的卸载力,箭头指示施力方向。

表3 前镜身卸载方案Tab.3 Comparison of unloading schemes for front body
3.2方案优选
首先对各方案的卸载力大小进行优化计算。优化目标及约束条件如下:

理论上满足设计目标的卸载力的组合有无数种。这里利用HyperStudy优化平台的单目标优化功能,设置次镜平移为优化目标,采用 OptiStruct求解器进行优化求解。在满足位移要求的解中选取满足次镜倾角要求、力的绝对值较小、分布较为均匀的一组解作为卸载力。
表3中方案一所示的吊带包覆可以很好地实现反射镜光轴水平的重力卸载。但由于前法兰的开口结构造成的刚度不足,施加吊带力后的重力变形比无卸载的变形更大,优化计算无法收敛至满足要求的卸载力解。图4为各方案在表3所示的卸载力组合和重力综合作用下相机的变形云图。其中方案一显示的为施加 1N的吊带力后相机的重力变形,其量级与无卸载时相当,因此吊带卸载方案不适合。其它四种方案均存在满足要求的解。将次镜连接点处的位移单独带入次镜组件模型,计算的面形误差——波面峰谷值(PV)和波面均方根误差(RMS),如表4所示。

图4 各卸载方案变形云图Fig.4 Displacement contour image for five unloading schemes
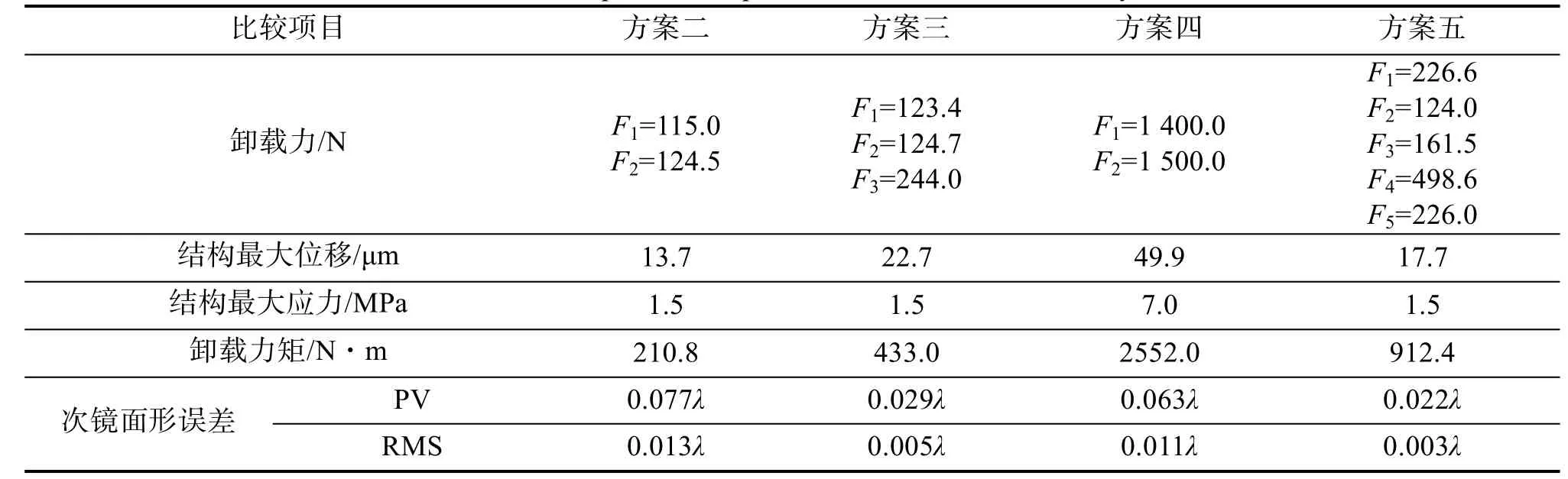
表4 前镜身卸载优化结果比较Tab.4 Comparison of optimization results for front body
对卸载方案进行对比和优选,选择的原则是在满足卸载要求的前提下,不引入较大的变形和应力,对反射镜面形影响程度低,卸载装置对系统的影响较小。方案二的两点卸载力为各方案中卸载力最小的一组,但施力点靠近次镜组件安装位置,局部变形对次镜面形的影响最大。方案四需要在前法兰两侧施加 1 500N的卸载力才能满足要求,局部位移和应力较大,且卸载力矩约为前镜身悬臂的重力力矩的2.8倍,会对主承力框产生额外的弯矩。方案三和方案五对次镜面形影响相对较小。方案五的五点卸载力对相机安装面的合力矩为912.4N·m,而前镜身悬臂对对相机安装面的重力力矩为917.9N·m,即卸载力矩基本抵消前镜身悬臂的重力力矩,在主承力结构上不产生多余力矩,对系统的影响最小。综合以上分析,确定采用方案五进行卸载。
综上,相机的卸载方案确定如下:
前镜身30°均布五点卸载力:F1+ F2+F3+F4+F5=1236.7N。
后镜身两点卸载力:F1+F2=400N+400N=800N。
卸载后各反射镜相对位移见表5。

表5 卸载后次镜、三镜相对主镜位移Tab.5 Displacement of second mirror and third mirror with gravity unloaded
相机各视场平均MTF对比见图5,卸载后的MTF值(50线对/mm)接近无重力时的计算值,较卸载前提高14%。
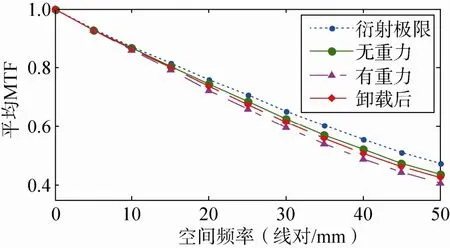
图5 卸载前后全视场平均MTF对比Fig.5 Average MTF contrast before and after unloading
4 重力卸载实施
4.1卸载装置设计
根据第3节确定的卸载方案进行卸载装置设计。卸载力的施加采用不同质量的砝码组合,系在绳索上悬垂在结构外侧,绳索另一端绕过定滑轮穿过空心梁,通过挂钩固定在结构上。前镜身采用龙门支架和定滑轮配合的方式,后镜身砝码则通过一根横梁固定于相机支架上,整个装置在不需要卸载时可以很方便地移除。在前法兰施力处设置吊装块减小结构局部应力。卸载工装构型如图 6所示。
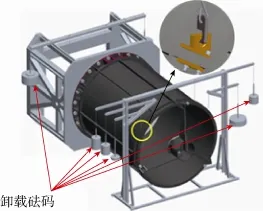
图6 卸载工装及相机示意Fig.6 Schematic diagram of unloading equipment and camera
4.2卸载实施
实际镜头装调时的重力卸载实现流程如图7所示。在上述有限元建模和卸载力大小优化的基础上,按照优化出的卸载力对系统施加重力卸载。根据加载后的光学测量结果对卸载力大小进行重新优化计算,并调整砝码质量再次测试。在次镜装调时,测量两镜系统的中心轴视场。次镜处在对称的两个位置上时,其系统泽尼克拟合像差数值大小一致,但互成正负号[8]。利用这一特性,配合次镜在未卸载和两倍卸载力下的检测结果,可以有效地判断次镜所在位置是否合理,指导前镜身卸载力的调整方式。经过多次卸载力调整测试指标满足使用要求时,可以确定反射镜装调状态。

图7 装调时重力卸载实施过程Fig.7 Gravity unloading process during alignment
该卸载方法和装置目前已应用在某型号实际装调过程中,经过测试,相机镜头的 MTF值达到了设计要求,该卸载装置满足调试使用要求。
5 结束语
在相机系统装调时需要考虑重力的影响,采取一定的措施对重力进行卸载,以保证装调的效果。卸载方案要求在能达到光学系统参数要求的前提下,以较小的系统影响实现对结构重力的适当卸载。卸载装置要求操作简单易行,便于施加和调节卸载力的大小。本文给出的大口径相机整机装调时的重力卸载方案,实现了水平装调时前后镜身悬臂的重力卸载,在不引入更多影响因素的条件下,有效减小了重力变形对镜头装配的影响。工装设计简单,工程可实施性强。卸载方法可以应用到其它大型相机镜头的装调过程中,为后续类似产品的研制提供了参考。
References)
[1]刘磊, 马军, 郑玉权. 空间微重力下离轴三反相机离焦范围[J]. 中国光学, 2014, 7(2): 320-325. LIU Lei, MA Jun, ZHENG Yuquan. Defocus Range of Off-axis Three-mirror Anastigmat (TMA) Camera under Space Microgravity[J]. Chinese Journal of Optics, 2014, 7(2): 320-325.(in Chinese)
[2]陈晓丽, 王彬, 杨秉新. 大口径超轻型反射镜定位和支撑方案研究[J]. 航天返回与遥感, 2010, 31(3): 15-20. CHEN Xiaoli, WANG Bin, YANG Bingxin. Study of Positioning and Mounting Scheme of Large Aperture Ultra-light Space Reflector[J]. Spacecraft Recovery and Remote Sensing, 2010, 31(3): 15-20. (in Chinese)
[3]曾勇强, 傅丹鹰, 孙纪文, 等. 空间遥感器大口径反射镜支撑结构型式综述[J]. 航天返回与遥感, 2006, 27(2): 18-27. ZENG Yongqiang, FU Danying, SUN Jiwen, et al. Summary of Support Structure Patterns of Large Mirror for Space Remote Sensor[J]. Spacecraft Recovery and Remote Sensing, 2006, 27(2): 18-27. (in Chinese)
[4]ZHAO Ye, ZHOU Yuming, LI Chenxi. A Support Method of Large Aperture Light Weighted Primary Mirror Manufacturing and Testing[C]//5th International Symposium on Advanced Optical Manufacturing and Testing Technologies. Dalian, 2010.
[5]ROBINSON D W. Minimizing Gravity Sag of a Large Mirror with an Inverted Handle Mount[R]. USA: Goddard Space Flight Center, 2000.
[6]刘梅, 胡企千. 空间太阳望远镜1m主镜支撑结构的研究[J]. 天文研究与技术-国家天文台台刊, 2004, 1(2): 99-106. LIU Mei, HU Qiqian. A Study on Support Structure of The One-Meter Primary Mirror of The Space Solar Telescope[J]. Astronomical Research And Technology-Publications of National Astronomical Observatories of China, 2004, 1(2): 99-106. (in Chinese)
[7]赵野, 王向东, 周于鸣. 一种大口径反射镜组件装配时重力卸载方法[C]. 第十九届中国遥感大会论文集. 北京: 中国宇航出版社, 2014: 570-574. ZHAO Ye, WANG Xiangdong, ZHOU Yuming. A Method of Off-loading Supporting for Large Aperture Reflector Component Assembling[C]. 19th Conference on Remote Sensing of China: China Astronautic Publishing House, 2014: 570-574. (in Chinese)
[8]韩娟, 段嘉友, 陈建军, 等. 大口径望远系统中主次镜系统的装调方法[J]. 中国激光, 2012, 39(7): 0716001.1-0716001.6. HAN Juan, DUAN Jiayou, CHEN Jianjun, et al. An Alignment of Primary and Secondary Mirrors for Optical System in Large Telescopic[J]. Chinese Journal of Lasers, 2012, 39(7): 0716001.1-0716001.6.(in Chinese)
[9]段学霆, 周仁魁, 吴萌源, 等.中心轴支撑大口径反射镜面形装调控制方法[J].光子学报, 2011, 40(z1): 95-98. DUAN Xueting, ZHOU Renkui, WU Mengyuan, et al. Distortion Alignment Method for Center Shaft Supporting Large Aperture Mirror[J]. Acta Photonica Sinica, 2011, 40(z1): 95-98. (in Chinese).
[10]GLENN P. Centroid Detector Assembly for the AXAF-I Alignment Test System[R].USA: Goddard Space Flight Center, 1995.
[11]OLDS C R, REESE R P. Composite Structures for the Advanced X-ray Astrophysics Facility (AXAF) Telescope[C]. Proc. SPIE 3356, Space Telescopes and Instruments V, Hawaii, 1998: 910-921.
[12]李威, 刘宏伟, 郭权锋, 等. 空间相机主次镜间的薄壁筒和支杆组合支撑结构[J]. 光学精密工程, 2010, 18(12): 2633-2641. LI Wei, LIU Hongwei, GUO Quanfeng, et al. Combined Supporting Structure of Thin Wall Joint Cylinder and Supporting Bar Between Primary Mirror and Second Mirror in Space Camera[J]. Optics and Precision Engineering, 2010, 18(12): 2633-2641.(in Chinese)
[13]王小勇, 郭崇岭, 胡永力. 空间同轴三反相机前镜身结构设计与验证[J]. 光子学报, 2011, 40(z1): 34-40. WANG Xiaoyong, GUO Chongling, HU Yongli. Design and Verification for Front Mirror-body Structure of on-axis Three Mirror Anastigmatic Space Camera[J]. Acta Photonica Sinica, 2011, 40(z1): 34-40. (in Chinese)
[14]刘婷毓, 张景旭, 杨飞, 等. 近红外镜头系统的设计与装调[J]. 红外与激光工程, 2013, 42(3): 669-674. LIU Tingyu, ZHANG Jingxu, YANG Fei, et al. Design, Assembly and Adjustment of A Near-IR Camera[J]. Infrared and Laser Engineering, 2013, 42(3): 669-674.(in Chinese)
[15]刘湃, 黄巧林, 杨居奎. 大口径长焦距相机主次镜支撑结构方案初步研究[J]. 航天返回与遥感, 2014, 35(3): 60-67. LIU Pai, HUANG Qiaolin, YANG Jukui. Research on Support Structure between Primary and Secondary Mirror in Large-aperture and Long-focal-length Space Camera[J]. Spacecraft Recovery and Remote Sensing, 2014, 35(3): 60-67. (in Chinese)
[16]刘磊, 李景林, 吕清涛, 等. 大口径反射光学系统装调装置设计研究[J]. 光学精密工程, 2005, 13(z1): 134-137. LIU Lei, LI Jinglin, LV Qingtao, et al. Research on Adjusting Device of Large Aperture Reflective Optics System[J]. Optics and Precision Engineering, 2005, 13(z1): 134-137. (in Chinese)
[17]张学敏, 韩娟, 段嘉友, 等. 共轴偏光瞳折轴三反射光学系统装调方法[J]. 中国激光, 2012, 39(4): 416003.1-0416003.6. ZHANG Xuemin, HAN Juan, DUAN Jiayou, et al. Alignment Method of Coaxial Eccentric-pupil Three-mirror System[J]. Chinese Journal of Lasers, 2012, 39(4): 0416003.1-0416003.6. (in Chinese)
[18]彭扬林, 戴一帆, 陈善勇, 等. 大口径空间反射镜高精度面形检测的支撑技术研究[J]. 应用光学, 2011, 32(6): 1166-1172. PENG Yanglin, DAI Yifan, CHEN Shanyong, et al. High-precision Figure Testing of Large-aperture Space Mirrors[J]. Journal of Applied Optics, 2011, 32(6): 1166-1172.(in Chinese)
[19]刘永奇, 吴金虎, 胡明勇, 等. 1.5m级大口径标准镜面支撑系统的研究[J]. 光学技术, 2011, 37(4): 429-432. LIU Yongqi, WU Jinhu, HU Mingyong, et al. Research on Support System for 1.5m Aperture Mirror[J]. Optical Technique, 2011, 37(4): 429-432.(in Chinese)
[20]周于鸣, 赵野, 王海超, 等. 大口径轻质反射镜光轴水平卸载支撑方法[J]. 红外与激光工程, 2013, 42(5): 1285-1290. ZHOU Yuming, ZHAO Ye, WANG Haichao, et al. Method of Off-loading Supporting for Large Aperture Light Weighted Reflect Mirror at Optical Axis Horizontal Situation[J]. Infrared and Laser Engineering, 2013, 42(5): 1285-1290.(in Chinese)
A Gravity Unloading Method of On-ground Alignment for Large Aperture Remote Sensor
LI Ling ZHAO Ye
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
While assembling and aligning on the ground, structure of large aperture remote sensor is greatly affected by gravity. With the deformation of supporting structure, position accuracy of optical elements will change. If gravity is not unloaded, mirror supporting part will rebound under space micro gravity environment and thus the relative location of mirrors will alter and system MTF will drop. In this paper, a large coaxial three-mirror space camera is considered. While aligning with horizontal optical axis, the effect of gravity on the lens transfer function is analyzed. Unloading scheme is chosen, unloading manner and force magnitude are designed based on simulation and optimization. Unloading device is developed and used. Experiment results show that this method satisfies the system assembling requests and can be a reference for other large aperture camera.
large aperture; on-ground alignment; gravity unloading method; optimization; space camera
TH74
: A
: 1009-8518(2016)05-0069-08
10.3969/j.issn.1009-8518.2016.05.008
李玲,女,1983年生,2009年获得西安交通大学飞行器设计专业硕士学位,工程师。主要研究方向为光学遥感器结构设计。E-mail:klezhuu@163.com。
(编辑:王丽霞)
2016-03-21
猜你喜欢
应用光学(2023年3期)2023-06-05 09:21:56
光学精密工程(2022年23期)2023-01-06 14:59:22
航天返回与遥感(2018年2期)2018-05-17 09:43:32
课程教育研究·学法教法研究(2016年36期)2017-03-31 06:15:20
光学精密工程(2016年11期)2016-12-19 02:30:19
光学精密工程(2016年5期)2016-11-07 09:06:06
光学精密工程(2016年1期)2016-11-07 09:01:58
肝胆胰外科杂志(2015年5期)2015-02-27 11:12:37
航天返回与遥感(2014年5期)2014-07-31 17:57:09
激光与红外(2014年8期)2014-03-20 08:50:22